👩💻ROS2 RealSense C++ Node
이번 포스팅에서는 Intel RealSense 카메라로 촬영한 비디오를 실시간 스트리밍하고, 영상에서 감지한 AprilTag을 OpenCV를 활용해 시각적으로 표시하는 ROS 2 기능을 C++ 노드로 구현하는 실습을 진행하겠습니다. AprilTag는 로봇 비전, 증강 현실, 마커 기반 위치 추정 등에 활용되는 태그 시스템입니다. 또한, 본 포스팅에서는 RealSense 카메라를 ROS 2에서 사용하기 위해 librealsense2를 설정하는 과정과 일반적으로 발생할 수 있는 빌드 문제 해결 방법도 함께 다룰 예정입니다.
이 간단한 ROS2 프로젝트를 시작하기 앞서, 아래의 사전 준비 사항들을 확인해서 먼저 환경을 셋팅해주시기 바랍니다.
Overview
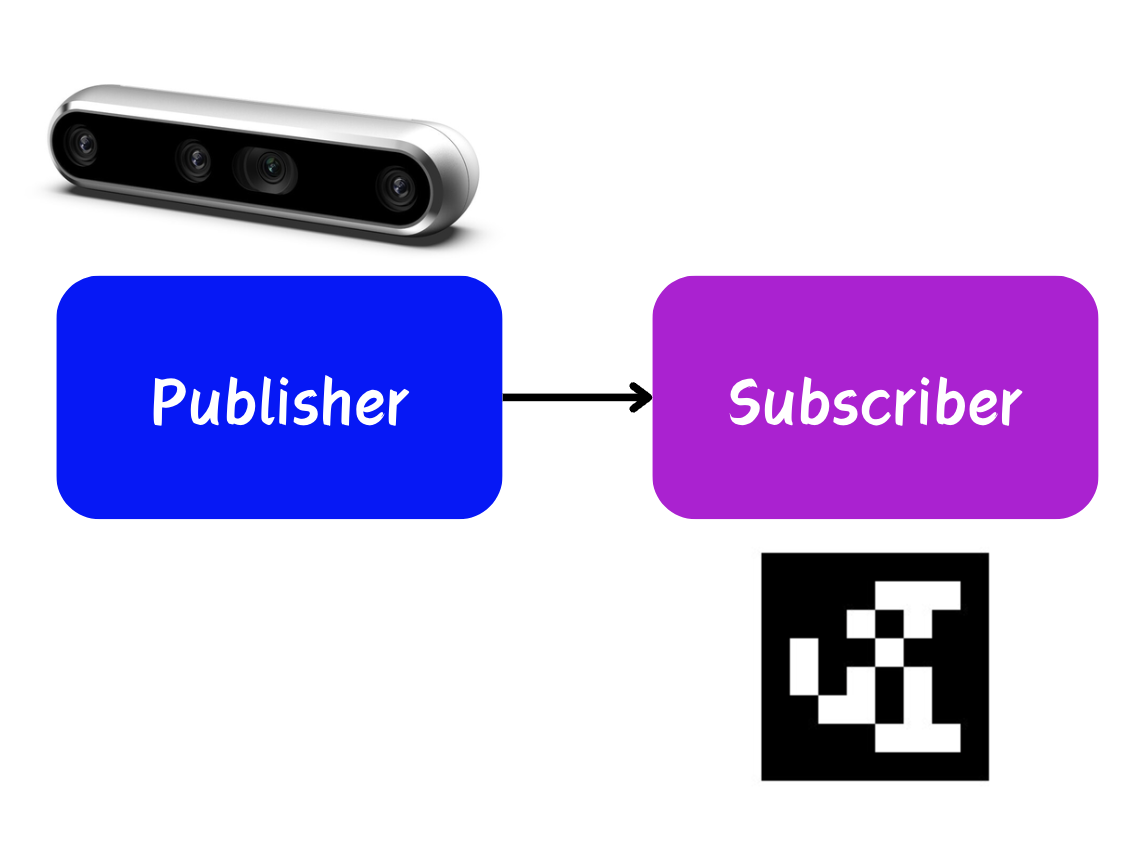
앞서 설명한 것처럼, 가장 단순한 ROS2 패키지 구조를 가지고 진행할 예정입니다. 2개의 C++ Node들, 즉 Publisher와 Subcriber를 만들어 Realsense Camera D457에서 이미지를 보내주면(Publisher) 받은 이미지를 토대로 Tag ID를 인식하여 OpenCV로 간단한 ploting을 한 창(Subsciber)을 띄워볼 예정입니다. 각 노드들의 역할을 정리해보면 아래와 같습니다.
- Publisher Node: RealSense 카메라에서 이미지를 수집하여 ROS 2 토픽으로 퍼블리싱하는 노드
librealsense2패키지를 이용하여 RealSense camera를 연결- 640×480 해상도, 30 FPS 칼라 이미지 프레임을 스트리밍
- ROS 2 토픽으로 (
image_raw) 이미지 프레임 Publish
- Subscriber Node: RealSense 카메라에서 영상을 받아 OpenCV로 처리하고, AprilTag 라이브러리를 활용하여 태그를 감지하는 기능을 수행하는 노드
image_raw토픽을 Subscribecv_bridge를 이용하여 OpenCVMat으로 이미지를 변환- OpenCV window에 간단한 표시를한 이미지 띄우기
Creating the ROS 2 Package
my_realsense_example 라는 새로운 ROS 2 package를 만들어 시작해보겠습니다. ROS2의 workspace에 있는 src/폴더에서 C++ 패키지를 생성해줍니다.
cd ~/ros2_ws/src
ros2 pkg create my_realsense_example \
--build-type ament_cmake \
--dependencies rclcpp sensor_msgs cv_bridge그다음, my_realsense_example/src/ 에 각 노드에 대한 C++ 스크립트 파일을 작성합니다. - realsense_publisher.cpp - image_subscriber.cpp
Publisher Node: realsense_publisher.cpp
우선, 카메라 센서에서 이미지를 받아 송출하는 Publisher 노드 코드를 살펴보겠습니다. 먼저, 아래와 같이 필요한 헤더와 패키지들을 포함합니다.
librealsense2/rs.hpp: RealSense 카메라를 제어
rclcpp/rclcpp.hpp: ROS 2 노드를 생성 및 관리
sensor_msgs/msg/image.hpp: ROS 2의 이미지 메시지를 처리
cv_bridge/cv_bridge.h: ROS 메시지와 OpenCV 이미지 간 변환
opencv2/opencv.hpp: OpenCV 기능 활용
이러한 요소들을 포함하여, RealSense 카메라에서 영상을 받아 ROS 2 메시지로 변환하고 퍼블리싱하는 노드를 구현할 수 있습니다.
본격적으로 RealSensePubliserClass를 살펴보면, RealSense 카메라에서 수집한 영상을 OpenCV 형식으로 변환한 후, 이를 ROS 2의 이미지 메시지로 변환하여 주기적으로 퍼블리싱하는 과정이 진행됩니다. 이 클래스 노드를 통해 송출된 이미지를 다른 ROS 2 노드가 Subscribe하고 활용할 수 있습니다.
크게 2 부분으로 나누어서 볼 수 있습니다.
- 노드 초기화 (
RealSensePublisher)rclcpp::Node를 상속받아"realsense_publisher"라는 이름의 ROS 2 노드를 생성합rs2::pipeline을 설정하여 RealSense 카메라에서 데이터를 스트리밍할 준비rs2::config를 사용해 컬러 영상 스트리밍을 640x480 해상도, BGR8 포맷, 30 FPS로 설정create_publisher<sensor_msgs::msg::Image>("image_raw", 10);를 통해"image_raw"토픽으로 영상을 퍼블리싱할 퍼블리셔를 생성create_wall_timer를 사용하여 100ms(약 10Hz) 간격으로 프레임을 가져와 퍼블리싱하는 타이머를 설정
- 프레임 캡처 및 퍼블리싱 (
publishFrame)pipeline_->wait_for_frames();를 사용해 RealSense 카메라에서 새로운 프레임을 가져옴frameset.get_color_frame();을 통해 컬러 프레임을 추출하고, 존재하지 않으면 경고 메시지를 출력cv::Mat을 사용하여 RealSense의 컬러 프레임 데이터를 OpenCV 형식으로 변환cv_bridge::CvImage를 활용해 OpenCV 이미지를 ROS 2의sensor_msgs::msg::Image형식으로 변환한 후 타임스탬프와 프레임 ID를 추가publisher_->publish(*image_msg);를 통해 변환된 이미지를"image_raw"토픽으로 퍼블리싱
class RealSensePublisher : public rclcpp::Node
{
public:
RealSensePublisher()
: Node("realsense_publisher")
{
pipeline_ = std::make_shared<rs2::pipeline>();
// Configure and start the pipeline to stream color images
rs2::config cfg;
cfg.enable_stream(RS2_STREAM_COLOR, 640, 480, RS2_FORMAT_BGR8, 30);
pipeline_->start(cfg);
publisher_ = this->create_publisher<sensor_msgs::msg::Image>("image_raw", 10);
timer_ = this->create_wall_timer(
std::chrono::milliseconds(100), // ~10 Hz
std::bind(&RealSensePublisher::publishFrame, this)
);
RCLCPP_INFO(this->get_logger(), "RealSense Publisher Node started.");
}
private:
void publishFrame()
{
// Wait for the next set of frames
rs2::frameset frameset = pipeline_->wait_for_frames();
rs2::video_frame color_frame = frameset.get_color_frame();
if (!color_frame)
{
RCLCPP_WARN(this->get_logger(), "No color frame received.");
return;
}
// Convert RealSense frame to OpenCV Mat
cv::Mat color_image(
cv::Size(color_frame.get_width(), color_frame.get_height()),
CV_8UC3,
(void*)color_frame.get_data(),
cv::Mat::AUTO_STEP
);
// Convert to ROS Image message via cv_bridge
auto image_msg = cv_bridge::CvImage(std_msgs::msg::Header(), "bgr8", color_image).toImageMsg();
image_msg->header.stamp = this->get_clock()->now();
image_msg->header.frame_id = "realsense_color_frame";
publisher_->publish(*image_msg);
}
std::shared_ptr<rs2::pipeline> pipeline_;
rclcpp::Publisher<sensor_msgs::msg::Image>::SharedPtr publisher_;
rclcpp::TimerBase::SharedPtr timer_;
};마지막으로 main에서는 ROS 2 노드 실행의 진입점으로, RealSensePublisher 노드를 생성하고 실행하는 역할을 합니다. 이를 통해 RealSense 카메라에서 받은 영상을 ROS 2의 "image_raw" 토픽으로 지속적으로 퍼블리싱하는 노드가 실행됩니다.
int main(int argc, char *argv[])
{
rclcpp::init(argc, argv); // ROS 2 노드 실행을 위한 초기화
rclcpp::spin(std::make_shared<RealSensePublisher>()); // `RealSensePublisher` 노드를 생성하고 실행
/*
`spin()` 함수는 노드가 지속적으로 실행되도록 유지하며,
콜백 함수(`publishFrame()`)를 주기적으로 호출하여 RealSense 카메라에서 영상을 가져오고 퍼블리싱합니다.
*/
rclcpp::shutdown(); // 프로그램 종료 시 ROS 2를 안전하게 종료
return 0;
}각 부분을 살펴본 Publisher 노드를 통합하면 아래와 같이 realsense_publisher.cpp가 완성됩니다.
Subscriber Node: image_subscriber.cpp
다음으로 위에서 Publisher 노드가 보내준 이미지 데이터를 받는 Subscriber 노드에 대해 살펴보겠습니다.
우선 아래와 같이 필요한 헤더 파일들을 포함합니다.
- C++ 표준 라이브러리 포함 (
<memory>,<string>,<iostream>)- 스마트 포인터(
std::shared_ptr), 문자열(std::string), 표준 입출력(std::cout)을 사용하기 위한 헤더 파일
- 스마트 포인터(
- ROS 2 관련 헤더 포함
rclcpp/rclcpp.hpp: ROS 2 노드 및 퍼블리셔/구독자 기능을 사용하기 위한 기본 라이브러리sensor_msgs/msg/image.hpp: ROS 2에서 이미지 메시지(sensor_msgs::msg::Image) 를 다루기 위한 메시지 타입
cv_bridge/cv_bridge.h: ROS 이미지 메시지를 OpenCV의cv::Mat으로 변환하거나, 반대로 OpenCV 이미지를 ROS 메시지로 변환하기 위해 사용
- OpenCV 관련 헤더 포함
opencv2/highgui.hpp: OpenCV의 GUI 기능 (cv::imshow(),cv::waitKey())을 사용하여 이미지를 표시할 때 필요opencv2/imgproc.hpp: 이미지 처리 기능(예: 필터링, 변형, 색 변환 등)을 수행하기 위한 라이브러리
- AprilTag 감지를 위한 라이브러리 포함
extern "C" {}블록을 사용하여 C 스타일로 작성된 AprilTag 라이브러리를 C++ 코드에서 사용할 수 있도록 합니다.
#include <apriltag.h>: AprilTag 감지 시스템의 핵심 헤더#include <tag25h9.h>: AprilTag 25h9 태그 세트를 사용하기 위한 헤더 파일(25x9 해상도를 가진 태그 세트)#include <tag36h11.h>는 주석 처리되어 있으며, 필요 시 AprilTag 36h11 세트(더 정밀한 태그)를 사용할 수 있도록 변경 가능
#include <memory>
#include <string>
#include <iostream>
// ROS 2
#include "rclcpp/rclcpp.hpp"
#include "sensor_msgs/msg/image.hpp"
#include "cv_bridge/cv_bridge.h"
// OpenCV
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
// AprilTag library headers
extern "C" {
#include <apriltag.h>
// #include <tag36h11.h>
#include <tag25h9.h>
}다음으로 ImageSubscriber Class를 보겠습니다. RealSense 카메라에서 수신한 영상을 처리하고, AprilTag을 검출하여 화면에 표시하는 ROS 2 노드를 구현합니다. OpenCV를 사용하여 영상을 변환하고, AprilTag 라이브러리를 이용해 태그를 감지 및 시각화하여 검출된 태그의 ID, 꼭짓점, 중심을 화면에 시각적으로 표시하는 과정이 구현되어 있습니다. 크게 세 부분으로 나누어서 보면,
1. 노드 초기화 (ImageSubscriber)
"image_raw"토픽을 구독(subscription_)하여 카메라 영상을 수신- OpenCV 창
"RealSense Camera + AprilTag"를 생성하여 화면에 영상을 표시할 준비 - AprilTag 검출기 초기화:
tag_family_ = tag25h9_create();→ AprilTag 25h9 태그 세트를 사용하도록 설정tag_detector_ = apriltag_detector_create();→ AprilTag 검출기를 생성apriltag_detector_add_family(tag_detector_, tag_family_);→ 특정 태그 패밀리를 검출기에 추가- 검출기의 매개변수(예:
quad_decimate,quad_sigma)를 조정하여 성능 최적화 가능
2. 이미지 수신 및 AprilTag 검출 (imageCallback): ROS 2의 "image_raw" 토픽에서 새로운 이미지가 수신될 때 호출
- ROS 2 이미지 메시지 → OpenCV
cv::Mat변환cv_bridge::toCvCopy(msg, "bgr8")->image;를 사용하여 ROS 2의sensor_msgs::msg::Image를 OpenCV 형식(cv::Mat)으로 변환합니다- 변환 중 오류 발생 시 예외를 처리
- 그레이스케일 변환 (AprilTag 검출은 흑백 영상이 필요)
cv::cvtColor(frame, gray, cv::COLOR_BGR2GRAY);
- OpenCV
cv::Mat→ AprilTag 전용 이미지 형식 (image_u8_t) 변환- AprilTag 라이브러리는
image_u8_t구조체를 사용하므로 변환이 필요 gray.data를buf로 전달하여 메모리 복사를 최소화
- AprilTag 라이브러리는
- AprilTag 검출 실행
apriltag_detector_detect(tag_detector_, &apriltag_image);을 호출하여 AprilTag을 감지- 검출된 태그는
zarray_t* detections에 저장
- 검출된 AprilTag에 대한 시각적 표시
- 각 태그의 네 개의 꼭짓점 좌표(
p[]) 를 가져와 초록색(cv::Scalar(0, 255, 0))으로 사각형을 그림 - 태그의 중앙 좌표(
c[]) 에 빨간색 원을 표시(cv::circle()) - 태그의 ID를 노란색(
cv::Scalar(0, 255, 255)) 텍스트로 화면에 출력
- 각 태그의 네 개의 꼭짓점 좌표(
- 메모리 정리
apriltag_detections_destroy(detections);를 호출하여 검출된 태그 리스트를 정리하여 메모리 누수를 방지
- 결과 이미지 표시
cv::imshow("RealSense Camera + AprilTag", frame);을 통해 검출 결과를 화면에 표시cv::waitKey(1);를 호출하여 OpenCV 창이 반응하도록 유지
3. 노드 종료 시 AprilTag 리소스 정리 (~ImageSubscriber())
apriltag_detector_remove_family(tag_detector_, tag_family_);→ 검출기에서 패밀리를 제거apriltag_detector_destroy(tag_detector_);→ 검출기 삭제tag25h9_destroy(tag_family_);→ 태그 패밀리 메모리 해제
class ImageSubscriber : public rclcpp::Node
{
public:
ImageSubscriber()
: Node("image_subscriber")
{
subscription_ = this->create_subscription<sensor_msgs::msg::Image>(
"image_raw",
10,
std::bind(&ImageSubscriber::imageCallback, this, std::placeholders::_1)
);
// Create an OpenCV window once
cv::namedWindow("RealSense Camera", cv::WINDOW_AUTOSIZE);
RCLCPP_INFO(this->get_logger(), "Image Subscriber Node started.");
}
private:
void imageCallback(const sensor_msgs::msg::Image::SharedPtr msg)
{
cv::Mat frame;
try
{
frame = cv_bridge::toCvCopy(msg, "bgr8")->image;
}
catch (cv_bridge::Exception &e)
{
RCLCPP_ERROR(this->get_logger(), "cv_bridge exception: %s", e.what());
return;
}
if (!frame.empty())
{
cv::imshow("RealSense Camera", frame);
cv::waitKey(1);
}
}
rclcpp::Subscription<sensor_msgs::msg::Image>::SharedPtr subscription_;
};마지막으로 main을 살펴보면 ROS 2 이미지 구독 노드(ImageSubscriber)를 실행하는 메인 함수로, ROS 2 이벤트 루프를 관리하며 이미지 구독 노드를 실행하면서 30Hz의 주기로 ROS 이벤트를 처리합니다.
int main(int argc, char *argv[])
{
rclcpp::init(argc, argv); // ROS 2 노드를 실행할 준비
auto node = std::make_shared<ImageSubscriber>(); // 노드 생성: `ImageSubscriber` 노드를 생성하여 RealSense 카메라에서 퍼블리싱되는 `"image_raw"` 토픽을 구독할 준비
rclcpp::Rate rate(30); // 초당 30회(30Hz) 실행
while (rclcpp::ok()) // 주기적 실행 루프
{
rclcpp::spin_some(node); // 노드가 메시지를 수신하고, 콜백 함수(`imageCallback`)를 실행할 수 있도록 합니다.
rate.sleep(); // 루프가 30Hz의 일정한 주기로 실행되도록 대기
}
rclcpp::shutdown(); // 프로그램 종료 시 ROS 2를 안전하게 종료
return 0;
}각 부분을 살펴본 Subsciber 노드를 통합하면 아래와 같이 image_subscriber.cpp가 완성됩니다.
CMakeLists.txt Configuration
그 다음으로 ROS2 패키지 빌드에 대한 내용을 담고 있는 CMakeLists.txt 파일을 작성해보겠습니다. CMakeLists.txt ( my_realsense_example 루트에 위치)에서 RealSense 카메라에서 이미지를 퍼블리싱하고, AprilTag을 검출하는 ROS 2 노드들을 빌드 및 설치하는 설정을 정의합니다. default로 생성되어있던 내용을 아래 내용으로 업데이트 합니다.
cmake_minimum_required(VERSION 3.8)
project(realsense_apriltag_pubsub)
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(cv_bridge REQUIRED)
find_package(OpenCV REQUIRED)
find_package(realsense2 REQUIRED)
find_package(apriltag REQUIRED) # <-- Add this!
include_directories(
include
${OpenCV_INCLUDE_DIRS}
)
# Publisher
add_executable(realsense_publisher src/realsense_publisher.cpp)
ament_target_dependencies(realsense_publisher
rclcpp
sensor_msgs
cv_bridge
)
target_link_libraries(realsense_publisher
${OpenCV_LIBS}
realsense2
)
# Subscriber with AprilTag
add_executable(image_subscriber src/image_subscriber.cpp)
ament_target_dependencies(image_subscriber
rclcpp
sensor_msgs
cv_bridge
)
target_link_libraries(image_subscriber
${OpenCV_LIBS}
realsense2
apriltag # <-- Link AprilTag
)
install(TARGETS
realsense_publisher
image_subscriber
DESTINATION lib/${PROJECT_NAME}
)
# Install the launch directory
install(DIRECTORY launch/
DESTINATION share/${PROJECT_NAME}/launch
)
ament_package()이 CMakeLists.txt는 RealSense 카메라에서 이미지를 퍼블리싱하는 노드와, 해당 영상을 구독하여 AprilTag을 검출하는 노드를 빌드할 수 있도록 설정합니다. 특히, apriltag 라이브러리를 추가하여 AprilTag 검출 기능이 포함된 구독자(image_subscriber) 노드를 지원하는 것이 특징입니다.
1. 필수 패키지 찾기 (find_package)
ament_cmake,rclcpp,sensor_msgs,cv_bridge,OpenCV,realsense2등의 패키지를 포함하여 ROS 2, OpenCV, RealSense SDK를 사용할 수 있도록 설정- AprilTag 추가 (
find_package(apriltag REQUIRED))- AprilTag 검출을 위해
apriltag라이브러리를 필수적으로 포함
- AprilTag 검출을 위해
2. 헤더 포함 경로 설정 (include_directories)
include/폴더와 OpenCV의 헤더 파일이 포함된 디렉토리를 추가
3. 퍼블리셔 실행 파일 생성 (realsense_publisher)
src/realsense_publisher.cpp파일을 빌드하여 실행 가능한 퍼블리셔 노드 생성ament_target_dependencies(realsense_publisher ...)를 통해 ROS 2 라이브러리(rclcpp,sensor_msgs,cv_bridge)와의 의존성을 설정target_link_libraries(realsense_publisher ${OpenCV_LIBS} realsense2)을 사용해 OpenCV 및 RealSense SDK를 링크
4. 구독자(AprilTag 포함) 실행 파일 생성 (image_subscriber)
src/image_subscriber.cpp파일을 빌드하여 실행 가능한 구독자 노드 생성ament_target_dependencies(image_subscriber ...)를 통해 ROS 2 라이브러리 의존성 추가target_link_libraries(image_subscriber ${OpenCV_LIBS} realsense2 apriltag)을 통해 OpenCV, RealSense SDK, AprilTag 라이브러리를 링크하여 AprilTag 검출 기능을 활성화
5. 실행 파일 설치 (install(TARGETS ...))
- 빌드된 실행 파일(
realsense_publisher,image_subscriber)을 ROS 2 패키지의 실행 가능 경로에 배포
6. Launch 파일 설치 (install(DIRECTORY launch/ ...))
launch/디렉토리를 ROS 2 패키지의share/디렉토리에 복사하여 실행 시 사용할 수 있도록 설정- 이를 통해
ros2 launch realsense_apriltag_pubsub some_launch_file.py형태로 실행 가능
7. 패키지 선언 (ament_package())
ament_package()를 호출하여 ROS 2 빌드 시스템(ament_cmake)과 호환되도록 패키지를 설정
⚠️발생할 수 있는 Build 에러 이슈들
- Undefined reference to
rs2_…:realsense2library를 링크하지 않았을 때 발생하는 에러입니다.find_package(realsense2 REQUIRED)와target_link_libraries(... realsense2)가CMakeLists.txt에 포함되어 있는지 확인하세요. - Cannot find
image_subscriber.cpp:CMakeLists.txt에서 지정한 파일 이름과 경로가src/폴더 내의 실제 파일과 정확히 일치하는지 확인하세요. - cv_bridge or OpenCV not found:
package.xml에 작성되어 있는 디펜던시들을 확인하고, 프로그래밍하는 환경 시스템에cv_bridge와 OpenCV가 설치되어 있는지 확인하세요.
Build & 실행
이제 패키지를 빌드할 모든 준비는 끝났습니다. 이제 소스 코드들을 작성한 workspace 경로(e.g., ~/ros2_ws)로 이동하여 빌드해줍니다.
colcon build --packages-select my_realsense_example
source install/setup.bash잘 빌드가 되었다면 터미널을 2개 띄워서 각각 publisher 와 subscriber 노드를 실행시켜 줍니다.
Terminal 1:
ros2 run my_realsense_example realsense_publisherTerminal 2:
ros2 run my_realsense_example image_subscriber
그러면 “RealSense Camera + AprilTag” 창이 나오면서 인식된 AprilTag ID와 박스가 표시된 창이 아래와 같이 나올 것 입니다!

Conclusion
이제 RealSense 카메라에서 컬러 프레임을 퍼블리싱하고, 이를 OpenCV 창에 표시하는 최소한의 ROS 2 시스템을 구축하였습니다. 단순히 영상을 수신하는 것뿐만 아니라, AprilTag 인식을 활용하여 간단한 이미지 후처리도 수행해 보았습니다. 이를 확장하면 로보틱스에서 필요한 위치 추정과 같은 고급 기능도 구현할 수 있으며, 깊이 프레임, 포인트 클라우드 등 RealSense에서 지원하는 다양한 스트림을 활용할 수도 있습니다. 이번 실습을 통해 ROS 2에서 C++ 기반 패키지를 빌드하고 활용하는 과정에 대한 이해를 돕고, 더 복잡한 기능을 구현하는 프로젝트로 나아가는 데 도움이 되기를 바랍니다.