이번 포스팅에서 리뷰할 논문은 Rotating without Seeing: Towards In-hand Dexterity through Touch 입니다. RSS(Robotics: Science and Systems) 2023 학회에서 발표된 해당 논문은 사람이 시각 없이 촉각만으로 손안에서 물체를 정교하게 조작하는 능력을 로봇 핸드에 구현하고자, 손바닥, 손가락 관절, 손끝 전체에 넓게 분포된 저비용의 이진 촉각 센서를 활용하여, 시뮬레이션에서 강화학습으로 학습한 정책을 실제 로봇 손에 적용하고, 이를 통해 학습한 물체뿐만 아니라 학습하지 않은 새로운 물체까지 조작할 수 있는 시스템인 Touch Dexterity를 제안합니다.
Introduction
대다수의 기존 연구들은 점점 더 고품질의 센서를 활용하여 정밀하고 세밀한 접촉을 다루는 데 초점을 맞추었습니다. 하지만 이러한 연구들은 대개 비싼 센서를 그리퍼나 손의 손가락 끝부분에만 부착할 수 있어, 조작기 전체를 감지하지 못한다는 한계를 가지고 있습니다. 이로 인해 수행할 수 있는 작업의 범위가 제한됩니다. 또한 복잡한 작업을 위해 대량의 학습 데이터를 필요로 하지만, 고정밀의 센서들을 사용하는 경우 더욱더 벌어지는 Sim2Real 간의 차이로 인해 시뮬레이터를 활용하기 어려운 문제가 존재합니다.
Touch Dexterity는 물체를 “보고” 조작하는 대신 단순히 접촉만으로 물체를 회전하거나 조작하는 기술입니다. 이 접근법은 손의 한쪽 면(손가락 끝, 링크, 손바닥)에 부착된 저비용의 binary force 센서를 활용합니다. 이러한 센서는 접촉 여부만을 판단하며, 이를 통해 물체의 상태를 “느낄 수” 있게 합니다. 16개의 센서를 조합하면 최대 2¹⁶가지 상태를 표현할 수 있어 강력한 표현력을 가질 수 있고, 또한 Sim2Real 격차는 시뮬레이션을 통해 충분한 데이터를 확보함으로써 해결 가능하며, 이 때 binary 센서는 단순한 구조로 인해 노이즈에 덜 민감하다는 장점이 있습니다.
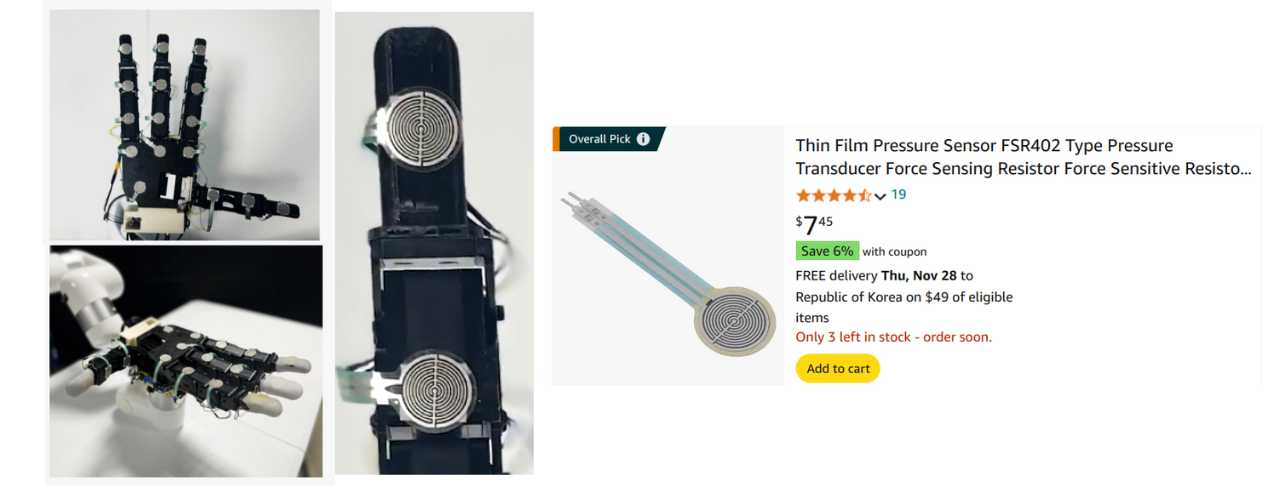 Amazon에서 약 8달러 정도로 저렴하게 판매되고 있는 FSR 센서를 부착한 모습
Amazon에서 약 8달러 정도로 저렴하게 판매되고 있는 FSR 센서를 부착한 모습
Touch Dexterity는 다중 손가락 로봇 손을 사용하여 “보이지 않는” 물체를 x, y, z 축으로 회전시키는 작업에 초점을 맞추고 있으며, 이는 in-hand re-orientation task의 단순화된 버전으로 볼 수 있습니다. 여기서 보이지 않는 물체란 단순히 시각 센서가 없는 것을 의미할 뿐만 아니라, 학습 중에 보지 못한 물체들을 의미하기도 합니다. 강화 학습(RL) 정책은 binary touch sensing 정보와 로봇의 내부 상태를 입력으로 받아 각 시간 단계에서 폐루프(closed loop) 제어를 위한 행동을 예측합니다. 강화학습 Agent는 물체의 3D 구조와 자세를 암묵적으로 학습하여 이를 기반으로 회전을 수행하며 실제 로봇 시스템 테스트에서는 10개의 다양한 물체를 활용하여 실험을 진행했습니다. 아래의 그림은 Unseen 물체였던 오리 인형을 real world에서 in-hand manipulation을 하는 장면입니다.
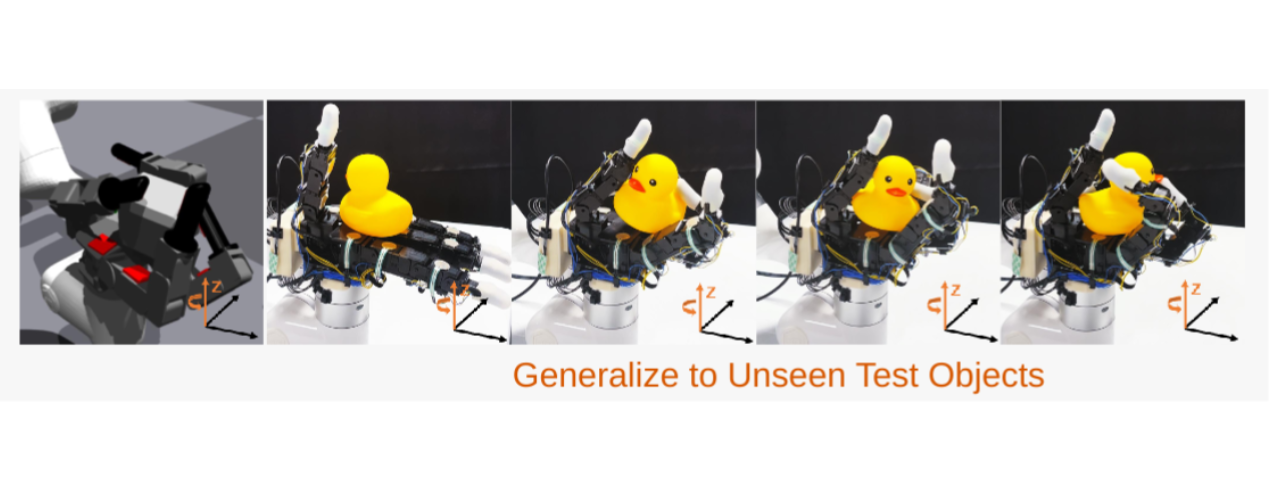 Rotate the rubber duck for two cycles without falling, even if it is never presented in training
Rotate the rubber duck for two cycles without falling, even if it is never presented in training
Dexterous Manipulation
기존의 분석적 모델 기반 접근법은 물체와 컨트롤러에 대한 지나치게 많은 가정을 필요로 하여 복잡한 문제로 확장하는 데 한계가 있습니다. 모방 학습(imitation learning)은 주로 시각 입력에 의존하며, proprioception 데이터 내에 포함된 암묵적인 촉각 정보를 통해 물체의 정보를 추론할 수 있지만, 주로 손가락 끝에서의 물체 회전이나 제한된 물체 집합의 회전에만 초점을 맞춥니다. 반면, Touch Dexterity는 촉각 센서를 사용하여 손과 물체 간의 상호작용을 명시적으로 인지하고, 다양한 종류의 물체에 대해 손바닥 위에서의 물체 회전 문제를 풉니다. 이는 복잡한 물체의 움직임을 포함하며, 훨씬 더 도전적인 문제를 다룰 수 있고 학습되지 않은 새로운 물체에 대해서도 일반화가 가능하다는 장점을 가지고 있습니다.
Tactile Robotic Manipulation
What type of touch information is essential?
기존 연구들은 다양한 센서를 활용하여 조작을 지원하기 위해 국소적인 형상 정보(local geometry), 힘과 토크, 접촉 이벤트, 물질 특성을 추출하는 방법을 제안해왔습니다. 심지어 간단한 binary 접촉 신호를 sparse sensor array로 제공받는 경우에도 high-dimensional manipulation task에서 유용할 수 있습니다. 일례로, Shadow Hand에 손바닥에 밀집된 센서 레이아웃을 활용한 연구도 있었습니다.
How can tactile events be simulated to facilitate Sim2Real transfer?
일반적으로 접촉 표면(contact surface)에서 normal & shear tactile force field을 시뮬레이션합니다. 반면, Touch Dexterity는 별도의 시뮬레이션 설계를 요구하지 않고, 기존 물리 시뮬레이터의 내장된 contact 시뮬레이션을 활용할 수 있다는 점에서 효율적이라고 볼 수 있습니다.
Learning Touch Dexterity
논문에서 제안된 Touch Dexterity의 AI 모듈이 학습되는 과정에 대해 살펴보겠습니다.
Domain Randomization
강화학습의 Sim2Real Gap을 줄이기 위해 학습 단계에서 Domain Randomization을 적용하는데 해당 연구에서는 2가지 Domain Randomization을 진행합니다.
물리적 랜덤화:
- rotation하는 object의 초기 위치, 질량, 형태, 마찰을 랜덤화하여 학습된 정책이 다양한 종류의 객체를 처리할 수 있도록 합니다.
- PD 컨트롤러의 게인을 랜덤화하여 실제 환경에서 PD 컨트롤러의 불확실성을 모델링합니다.
- 각 촉각 센서를 랜덤화하는 것도 고려합니다. 활성화된 접촉 센서(출력이 1인 경우)에 대해, 확률 p로 출력을 0으로 뒤집습니다.
- 지수 지연 모델(exponential delay)을 통해 접촉 센서의 신호 지연을 모델링합니다.
비물리적 랜덤화
- policy의 observation과 출력된 action에 화이트 노이즈를 주입하여 작은 외란에도 강인하도록 만듭니다.
Training Procedure
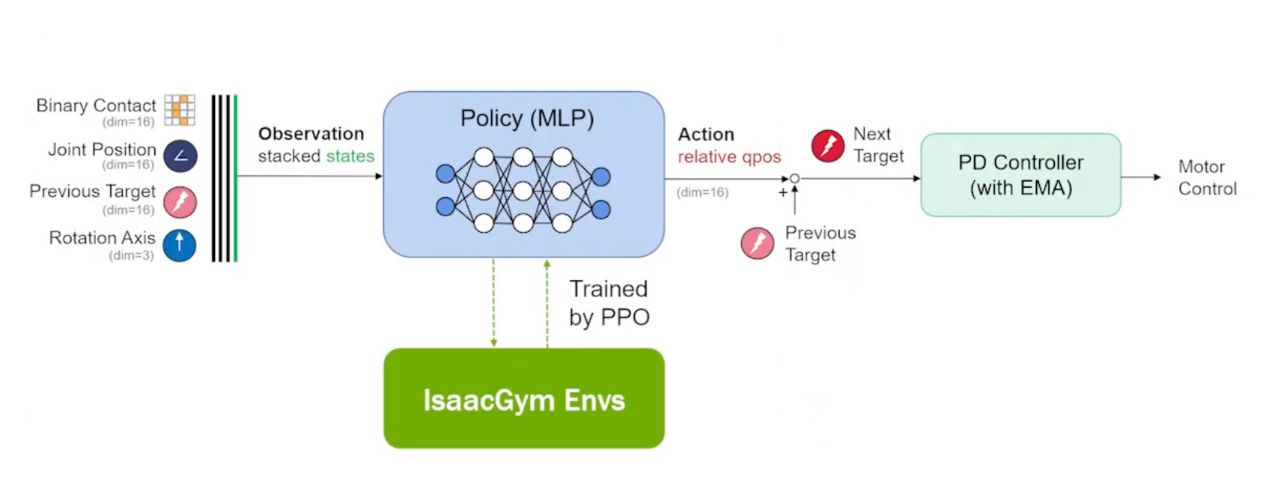
Proximal Policy Optimization (PPO) 알고리즘을 사용하며 policy 네트워크와 value 네트워크 모두에 다층 퍼셉트론(MLP)을 사용했습니다.
- 훈련 설정:
- 이점(advantage) 클립 임계값 ϵ=0.2= 0.2와 KL 발산 임계값 0.020.02를 사용
- 네트워크에서 활성화 함수로 ELU를 사용
- 정책 네트워크는 학습 가능한 상태 독립적인 표준편차를 가지는 가우시안 분포를 출력
- 비대칭 관찰(asymmetric observation):
- 정책 및 가치 네트워크의 학습 난이도를 줄이기 위해 asymmetric observation 을 사용
- 가치 네트워크: 입력에 접촉력, object의 ground-truth pose, 물리적 파라미터와 같은 특권 정보를 추가
- 정책 네트워크: 현재 상태와 함께 3개의 과거 상태를 입력으로 사용하며, 특권 정보는 접근할 수 없음
- 시뮬레이션 설정:
- IsaacGym 시뮬레이션에서 시간 간격(dt)은 0.01667초로 설정하고, 2 sub step을 사용
- 8192개의 병렬 환경에서 시뮬레이션을 실행
- 정책 네트워크가 출력하는 행동(제어 목표)은 6단계 동안 실행되며, 이는 실제 환경에서 10Hz의 제어 주파수에 해당
 Training Process
Training Process
Tactile Dexterous Manipulation System
Real-world System Setup
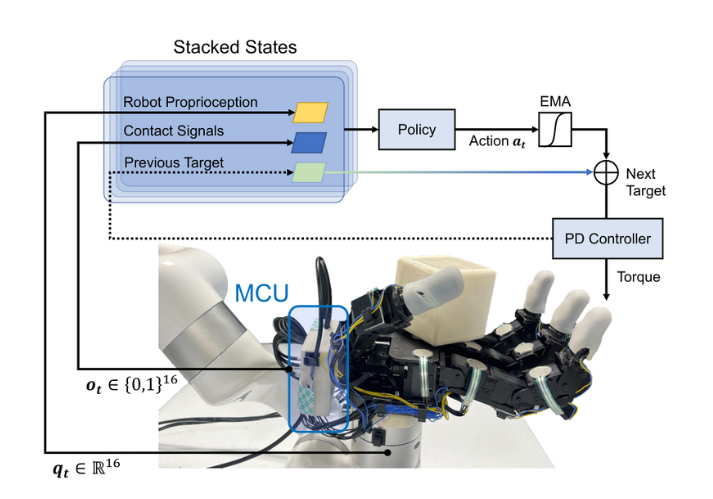 Overview
Overview
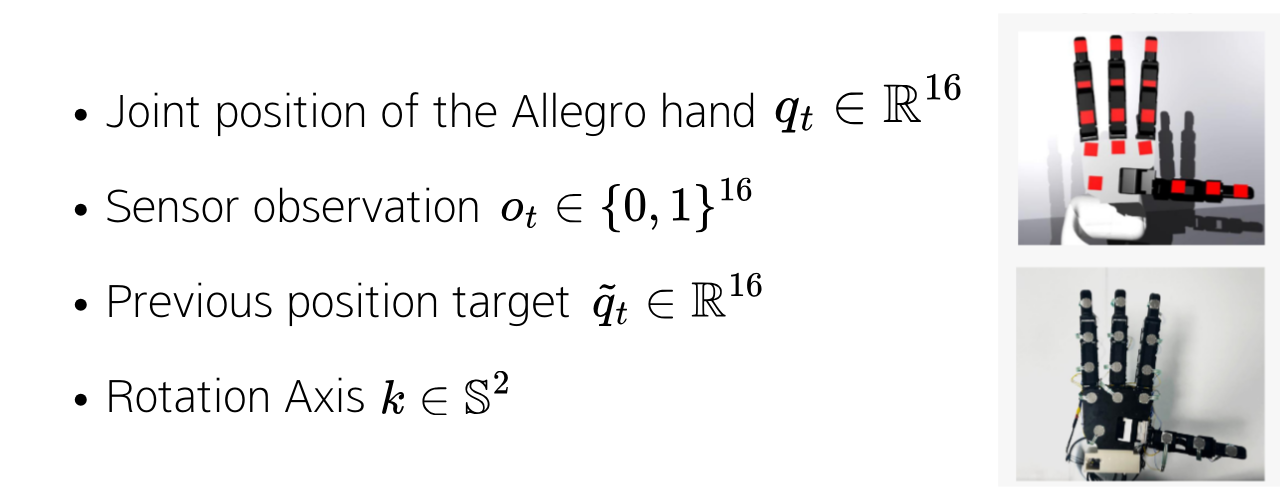
하드웨어 구성은 XArm 로봇 팔과 16자유도(16-DOF)를 가진 Allegro Hand에 접촉 센서 배열을 장착한 형태로 이루어져 있습니다. 손바닥과 손가락 끝을 포함한 Allegro Hand의 여러 부위에 부착된 16개의 접촉 센서로 구성됩니다.
사용된 접촉 센서는 외부 힘이 표면에 가해질 때 저항이 변하는 Force-Sensing Resistor(FSR) 기반입니다. STM32F 마이크로컨트롤러를 사용하여 각 센서의 아날로그 전압 신호를 수집하고, 이를 디지털 신호로 변환하여 호스트로 전달합니다. 이 접촉 센서는 연속적인 접촉력 측정을 출력할 수 있지만, 신호는 일반적으로 비선형적이고 노이즈가 많습니다. 따라서 이를 제어에 사용하기 전에 적절한 전처리가 필요합니다. 선택된 임계값 \theta_{\text{th}}에 따라 이 측정값을 이진화(binarize)하고 이 신호를 사용합니다.
이진 신호를 사용하는 장점:
- 시뮬레이션과 실제 로봇 간의 차이를 줄이고, Sim2Real 전이 절차를 단순화할 수 있습니다.
- 이진화된 측정값은 임계값을 조정하여 쉽게 보정(calibrate)할 수 있습니다.
Simulation Setup
이 논문에서는 IsaacGym 시뮬레이터 사용합니다. 각 접촉 센서는 손가락과 손바닥 링크의 고정된 링크로 시뮬레이션됩니다. 시뮬레이터는 매 시뮬레이션 단계에서 각 센서 링크에 대한 순 접촉력 F=[Fx,Fy,Fz]F = [F_x, F_y, F_z]를 제공합니다. \|F\|을 시뮬레이션된 접촉력 측정값으로 사용한 다음, 이 측정값을 다른 임계값 \tilde{\theta}_{\text{th}}으로 이진화합니다.
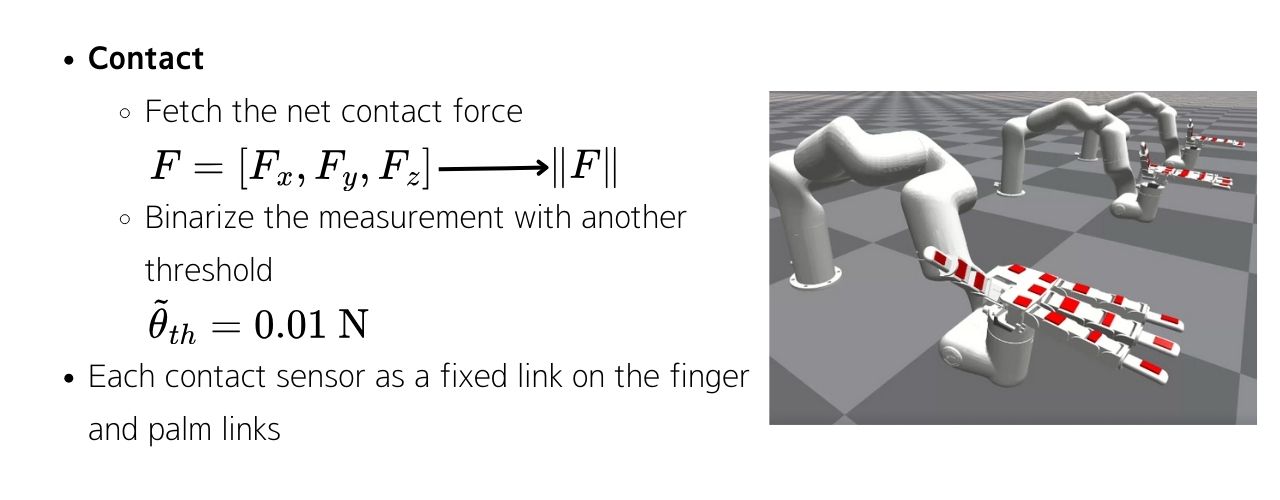
중요한 점은 센서의 부모 링크에서 제공되는 힘은 순 접촉력에 기여하지 않는다는 것입니다. 시뮬레이션에서 실제 환경과 유사한 동작을 보장하기 위해 이 센서들의 임계값 \tilde{\theta}_{\text{th}}을 조정합니다. 시뮬레이션에서는 \tilde{\theta}_{\text{th}} = 0.01N을 사용합니다.
Benchmark: In-hand Rotation
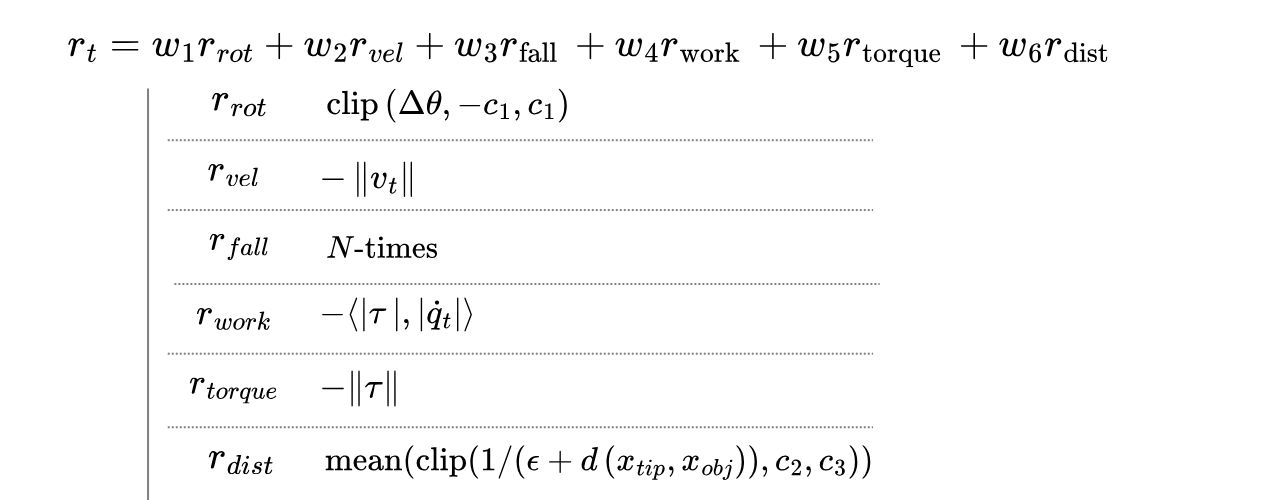
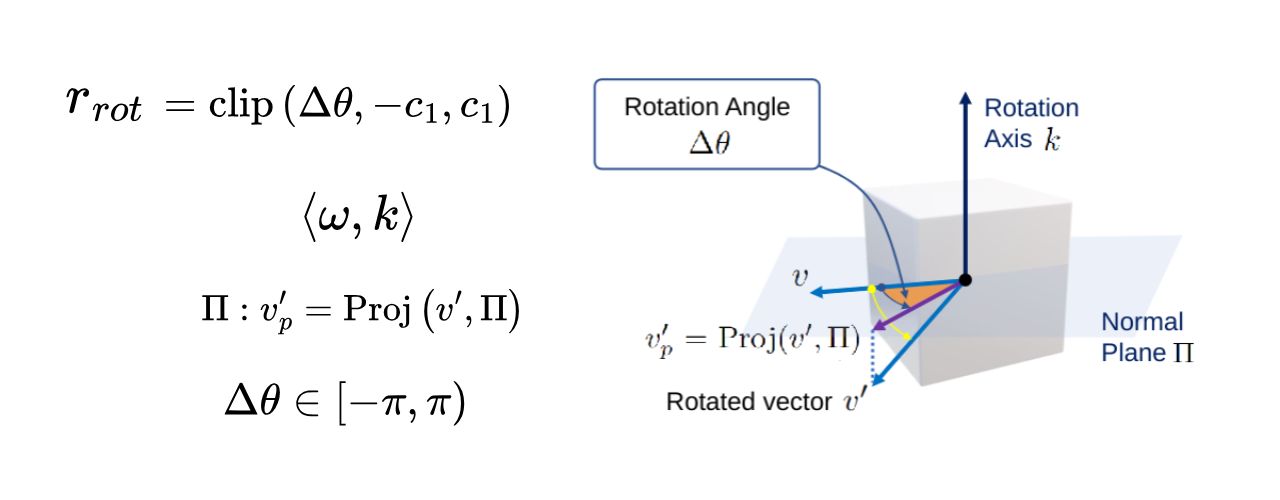
이 논문에서는 시스템의 손재주(dexterity)를 연구하기 위해, 시스템을 사용하여 손 안에서 회전하는 작업(in-hand rotation task)을 목표로 합니다. 이 task는 object가 손바닥에 초기화된 상태로 시작하며, 로봇 손은 주어진 회전 축을 따라 객체를 회전시켜야 합니다. 손 안에서 객체를 회전하는 동안, object의 움직임은 손끝 회전(finger-tip rotation)보다 훨씬 더 복잡하며 특히, 손 안에서 조작하는 동안 객체는 손바닥에서 미끄러지거나 구를 수 있습니다.
이와 같은 복잡한 움직임 패턴 때문에, 성공적인 조작을 위해 촉각 센서나 비전(vision) 시스템의 명시적인 피드백이 필요합니다. 그렇지 않으면, 현재 객체의 상태를 추론할 수 없으며, 객체를 안전하게 밀거나 회전시키는 데 실패할 수 있습니다.