📃Touch in the Wild 리뷰
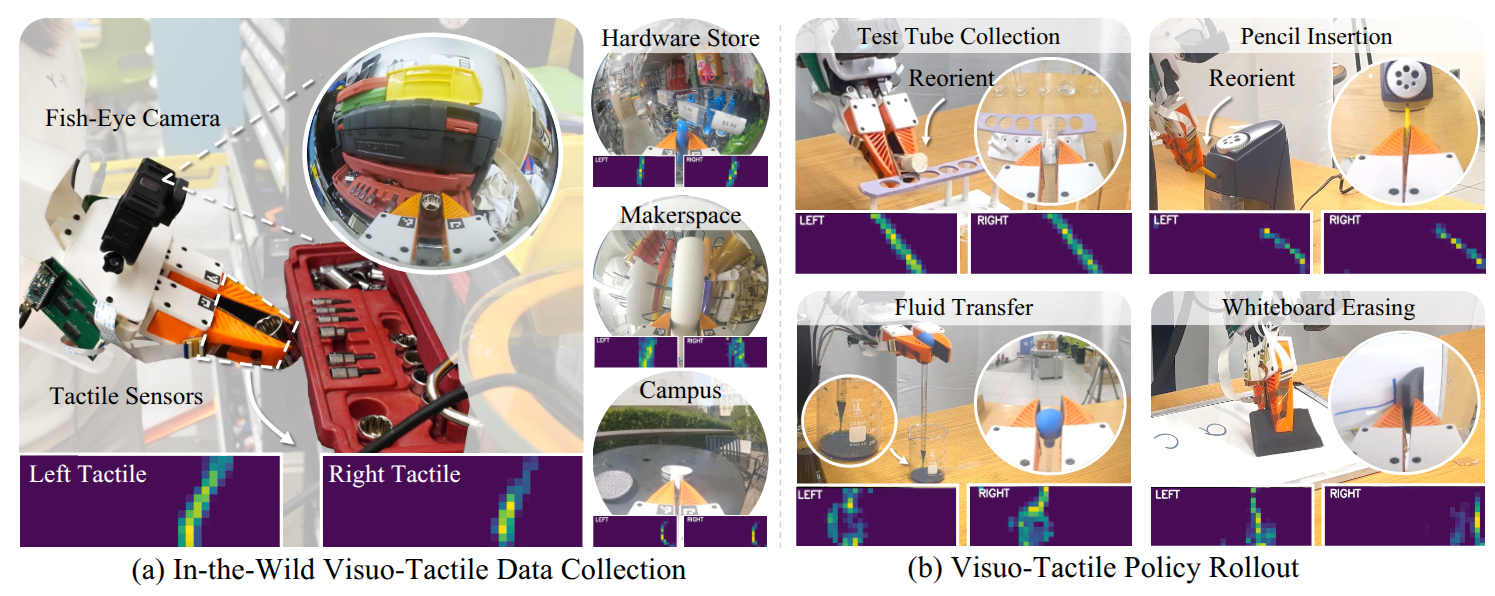
- 이 연구는 휴대 가능하고 가벼운 촉각 센서가 통합된 그리퍼를 개발하여, 다양한 실제 환경에서 시각 및 촉각 데이터를 동기화하여 대규모로 수집할 수 있게 했습니다.
- 수집된 데이터셋을 기반으로, 시각 및 촉각 신호의 고유한 특성을 보존하면서 이들을 통합하는 교차 모달 표현 학습 프레임워크를 제안하여 상호작용 관련 접촉 영역에 집중하는 해석 가능한 표현을 학습합니다.
- 이 표현은 섬세한 조작 작업에서 로봇 정책 학습의 효율성과 정확성을 크게 향상시켜, 외부 교란에도 견고한 정밀 조작(예: 시험관 삽입, 피펫을 이용한 유체 이동)을 가능하게 합니다.
1 Brief Review
이 논문은 정밀한 로봇 조작에 필수적인 촉각 피드백을 통합하기 위해 휴대 가능하고 가벼운 촉각-시각 그리퍼(visuo-tactile gripper)와 이에 기반한 크로스-모달(cross-modal) 표현 학습 프레임워크를 제안합니다. 기존의 핸드헬드 그리퍼는 시각 정보에만 의존하여 실제 환경(in-the-wild)에서의 세밀한 접촉 기반 조작에 한계가 있었습니다. 이를 해결하기 위해 저자들은 두 가지 주요 과제를 제시합니다:
휴대 가능한 견고한 촉각 하드웨어의 부재,
이질적인 촉각 및 시각 데이터로부터 효과적인 표현을 학습하는 어려움.
하드웨어 시스템:
제안된 휴대용 촉각-시각 그리퍼는 소프트하고 핀 모양의 손가락에 유연한 압전저항(piezoresistive) 촉각 센서를 통합합니다. 이 센서는 3D-ViTac의 3중 레이어 디자인을 기반으로 하며, 다음과 같은 개선 사항을 포함합니다:
- 높은 공간 해상도: 기존 스테인리스 스틸 전극 대신 FPC(Flexible Printed Circuits) 전극을 사용하여 패드당 12 \times 32 텍셀(taxel)의 해상도(각 텍셀 2 \times 2 \text{mm}^2 영역)를 달성하여 미세하고 동적인 접촉 패턴을 포착할 수 있습니다.
- 빠르고 확장 가능한 제조: FPC를 사용하여 도구 없이 5분 이내에 각 패드를 제작하고 그리퍼에 부착할 수 있어 대규모 촉각 데이터 수집에 용이합니다. 이 그리퍼는 맞춤형 Arduino 기반 PCB와 함께 사용되며, 배터리를 포함하여 약 962g으로 장시간 사용에 적합합니다. 데이터 수집은 fisheye 카메라의 시각 정보와 촉각 센서의 데이터를 23Hz로 동기화하여 이루어집니다. 시각-촉각 데이터의 정밀한 정렬을 위해 하드웨어 없이 QR 코드를 통한 호스트 시간 동기화 전략을 사용합니다. 비디오 스트림은 각 데모 시작 전에 현재 호스트 시간을 표시하는 QR 코드를 30Hz로 카메라에 보여주고, 촉각 데이터는 ROS2를 통해 23Hz로 호스트 클록 타임스탬프와 함께 발행됩니다. 오프라인 후처리에서 이 공유 클록 참조를 통해 시각 및 촉각 기록을 정렬합니다.
방법론:
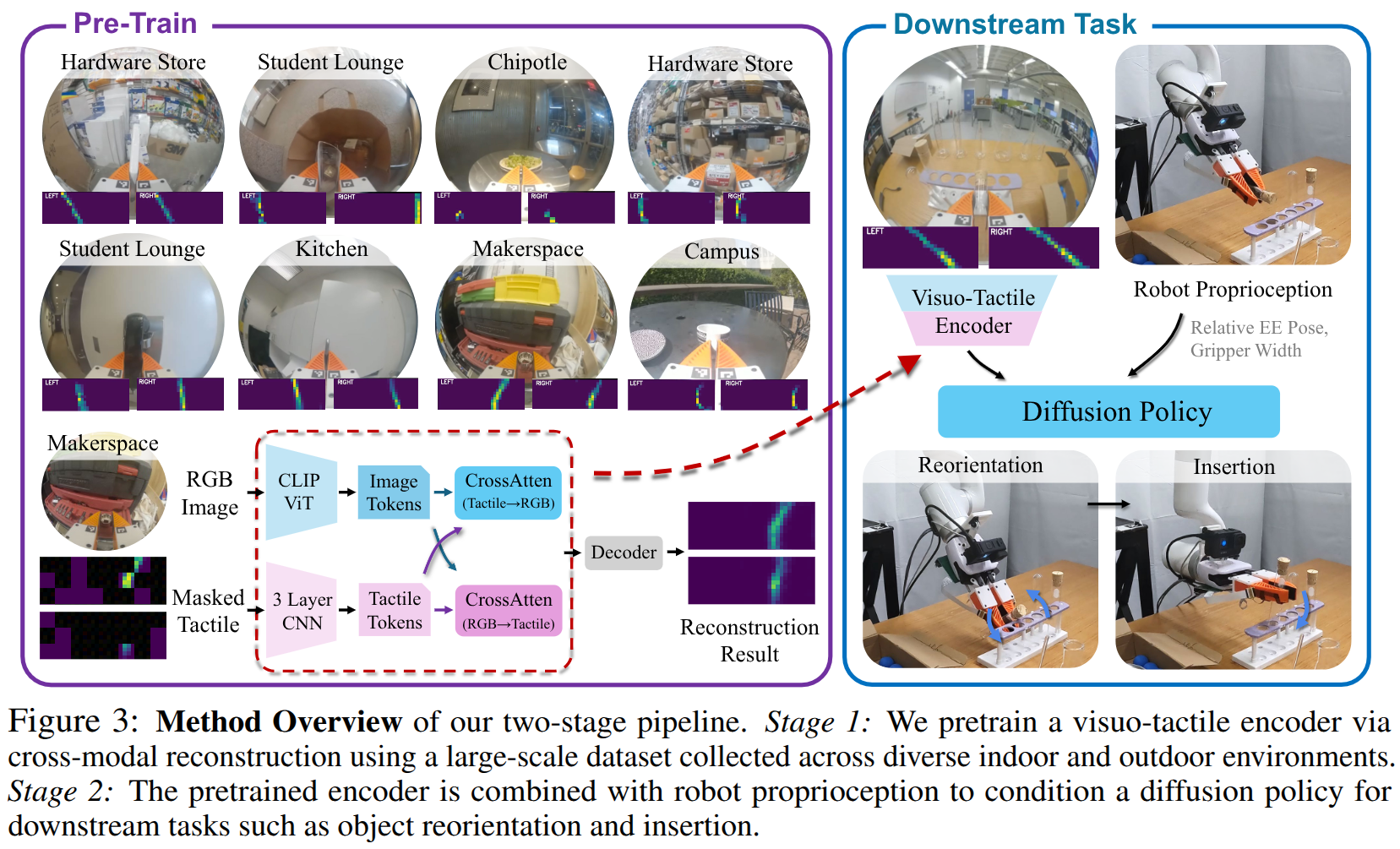
이 논문은 두 단계의 학습 프레임워크를 제안합니다.
1단계: 촉각-시각 표현 학습 (Visuo-Tactile Representation Learning)
이 단계의 목표는 촉각-시각 엔코더 E_{\phi}를 통해 시각 I \in R^{3 \times 224 \times 224}와 촉각 T \in R^{1 \times 24 \times 32} 입력을 공동 표현 z_{\text{fusion}} = E_{\phi}(I, T)로 융합하는 것입니다. 이 과정은 마스킹된 오토인코딩(masked autoencoding) 방식으로 학습됩니다. 이는 대조 학습(contrastive learning)이 촉각 센서의 미세한 지오메트리 민감 신호를 억제할 수 있다는 점을 고려하여, 부분적으로 관측된 촉각 입력과 시각적 컨텍스트로부터 전체 촉각 이미지를 재구성하는 방식으로 진행됩니다. 최적화 목표는 다음과 같습니다: (\phi^*, \psi^*) = \text{arg min}_{\phi, \psi} E_{(I,T) \sim D_{\text{pretrain}}} ||T - D_{\psi}E_{\phi}(I, T)||_2^2 여기서 E_{\phi}는 촉각-시각 엔코더이고 D_{\psi}는 촉각 재구성 디코더입니다.
- 촉각 엔코더:
- 두 개의 손가락 끝 패드로부터의 촉각 판독값(각 1 \times 12 \times 32)을 수직으로 쌓아 1 \times 24 \times 32 촉각 이미지를 형성합니다.
- 단일 채널 맵은 고정된 컬러맵(colormap)을 통해 3채널 RGB 촉각 이미지로 변환됩니다.
- 이 이미지는 4 \times 4 패치로 분할되어 6 \times 8 패치 그리드를 생성합니다.
- 학습 중에는 95%의 샘플에서 60-80%의 패치를 학습 가능한 토큰 T_{\text{mask}}로 무작위 마스킹합니다.
- 마스킹된 촉각 입력 T_{\text{visible}}은 다음과 같이 정의됩니다: T_{\text{visible}} = M \odot T + (1 - M) \odot T_{\text{mask}} (M \in \{0, 1\}^{6 \times 8}은 이진 패치 마스크).
- T_{\text{visible}}은 3계층 CNN을 통해 768차원의 임베딩 z_{\text{tac}}를 생성합니다.
- 시각 엔코더:
- RGB 이미지 I는 CLIP으로 초기화된 ViT-B/16 엔코더에 의해 처리됩니다.
- 모든 레이어를 미세 조정하며, 최종 [CLS] 토큰이 768차원의 시각 임베딩 z_{\text{img}}로 추출됩니다.
- 크로스-모달 융합:
- 촉각 및 시각 특징을 통합하기 위해 두 라운드의 멀티-헤드 크로스-어텐션(Multi-Head Cross-Attention, MHAttn)을 적용합니다.
- z'_{\text{tac}} = \text{MHAttn}(Q = z_{\text{tac}}, K = z_{\text{img}}, V = z_{\text{img}}) \xrightarrow{\text{LayerNorm}} z''_{\text{tac}}
- z'_{\text{img}} = \text{MHAttn}(Q = z_{\text{img}}, K = z''_{\text{tac}}, V = z''_{\text{tac}}) \xrightarrow{\text{LayerNorm}} z''_{\text{img}}
- 업데이트된 임베딩을 연결하여 융합된 표현 z_{\text{fusion}} = [z''_{\text{tac}}; z''_{\text{img}}] \in R^{2d}를 얻습니다.
- 촉각 재구성 디코더:
- 융합된 특징 z_{\text{fusion}}은 2계층 MLP와 시그모이드 활성화 함수를 통과하여 재구성된 촉각 이미지 \hat{T} \in R^{1 \times 24 \times 32}를 생성합니다.
- 손실 함수는 전체 이미지 재구성 손실 L_{\text{stage1}}(\phi, \psi) = ||T - \hat{T}||_2^2입니다.
- EMA(Exponential Moving Average)를 통해 타겟 엔코더를 안정화합니다.
2단계: 행동 복제(Behavior Cloning)를 통한 정책 학습 (Policy Learning)
사전 학습된 촉각-시각 엔코더 E_{\phi}는 조건부 Diffusion Policy에 통합됩니다.
- 관측 공간: 각 타임스텝 t에서 로봇은 raw 센서 입력 (I_t, T_t, p_t)를 받습니다. I_t와 T_t는 사전 학습된 엔코더를 통해 촉각-시각 임베딩 z_t = E_{\phi}(I_t, T_t)를 생성하고, p_t는 고유 수용성 상태(end-effector pose, gripper width 등)를 나타냅니다. Diffusion Policy는 o_t = (z_t, p_t)에 따라 조건화됩니다.
- Diffusion Policy: 액션을 직접 회귀하는 대신 노이즈 예측기 \hat{\epsilon}_t^k = \epsilon_{\theta}(a_t^k, o_t, k)를 학습합니다.
- 손실 함수: L_{\text{stage2}} = E_{t,k}[||\epsilon_t^k - \hat{\epsilon}_t^k||_2^2].
- 추론 시에는 a_t^K \sim N(0, I)에서 시작하여 K 스텝 동안 노이즈를 제거합니다: a_t^{k-1} = \alpha a_t^k - \gamma \epsilon_{\theta}(a_t^k, o_t, k) + N(0, \sigma^2I).
- 모든 엔코더 구성 요소(CLIP 백본, 촉각 CNN, 크로스-어텐션 레이어)는 이 단계에서 미세 조정됩니다.
실험 및 결과:
이 시스템은 “test tube insertion”과 “pipette-based fluid transfer”와 같은 네 가지 실제 환경 로봇 조작 작업에서 검증되었습니다.
- 대규모 촉각-시각 데이터셋: 12개의 실내 및 실외 환경에서 수집된 2700개 이상의 데모와 260만 개 이상의 촉각-시각 쌍으로 구성된 데이터셋을 구축했습니다. 이 데이터셋은 핵심 작업, 기타 실내 작업, 그리고 30개 이상의 야외(in-the-wild) 작업을 포함합니다.
- 정성적 분석: 사전 학습된 엔코더는 부분적으로 마스킹된 촉각 및 RGB 이미지로부터 누락된 촉각 입력을 성공적으로 재구성합니다. 또한, ViT의 self-attention 맵은 배경이나 객체의 종류에 관계없이 그리퍼 접촉 영역에 일관되게 집중합니다. 데이터셋 크기가 클수록 재구성 손실이 낮아지고, 어텐션 맵이 더 선명하게 그리퍼 접촉 영역에 집중하며, 재구성된 촉각 이미지는 노이즈가 줄고 구조가 명확해집니다.
- 정량적 평가: “Vision-Only”, “Ours w/o Cross Attention”, “Ours w/o Pretraining” 등 여러 baseline과 비교했습니다. 제안하는 “Ours w/ Pretraining” 방법이 모든 세부 작업 및 전체 작업에서 일관되게 가장 높은 성공률을 보였습니다. 특히, “Test Tube Collection”과 “Fluid Transfer” 같은 미세 조작 작업에서 탁월한 성능을 입증했습니다.
- 분석:
- 촉각 피드백은 명시적인 “in-hand” 상태 정보를 제공: 시각 정보만으로는 객체 가려짐이나 모호한 시각적 단서(예: 시험관 재배치 중 코르크 색상 변화)로 인해 오류가 발생하기 쉽지만, 촉각 정책은 이러한 변화에 영향을 받지 않습니다.
- 촉각 피드백은 중요한 상태 전환 감지를 향상: “Fluid Transfer”와 같이 미세한 힘 제어가 필요한 작업에서 시각 정책은 압력 변화를 감지하기 어렵지만, 촉각 정책은 미묘한 힘 변화를 감지하여 정확한 단계 전환을 가능하게 합니다.
- 공동 촉각-시각 엔코더는 시각과 촉각의 조화로운 사용 가능: 단순한 특징 연결(크로스-어텐션 없는 정책)은 한 가지 모달리티에 과도하게 의존할 수 있지만(예: 화이트보드 지우기에서 과도한 힘 적용), 공동 학습된 엔코더는 시각적 맥락과 촉각 피드백에 따라 힘을 적절히 조절합니다.
- 사전 학습 제거 연구(Ablation Study): 낮은 데이터 및 낮은 에포크 환경에서 사전 학습이 정책 성능에 상당한 이점을 제공함이 확인되었습니다. 사전 학습된 정책은 더 부드러운 궤적을 따르며, 초기 환경 구성에 더 견고했습니다. 이는 사전 학습이 촉각-시각 상관관계를 조기에 학습하여, downstream 정책이 효과적인 액션 궤적 학습에 집중할 수 있게 돕기 때문입니다. 어텐션 맵 분석 결과, 사전 학습된 정책은 그리퍼-객체 접촉 영역에 집중하는 반면, 사전 학습 없는 정책은 관련 없는 배경 요소에 주의를 기울이는 경향이 있어 성능 저하를 야기합니다.
결론: 이 논문은 촉각 센서가 통합된 핸드헬드 그리퍼와 이를 통해 수집된 대규모 촉각-시각 데이터셋을 제시합니다. 사전 학습된 촉각-시각 공동 엔코더가 단일 팔 로봇의 정밀 조작 작업에서 유용함을 입증했습니다. 향후 연구에서는 이를 다지(multi-finger) 능숙한 손으로 확장하여 더욱 풍부하고 능숙한 조작 기술을 구현하는 것을 목표로 합니다.
2 Detail Review
Touch in the Wild – 휴대형 시각-촉각 그리퍼로 정밀 조작을 학습하다
2.1 1. 개요 및 기술적 기여
이 논문은 다음과 같은 세 가지 기술적 기여를 중심으로 전개됩니다:
휴대형 시각-촉각 그리퍼 개발 논문에서는 290g에 불과한 가볍고 배터리로 구동되는 휴대형 그리퍼를 설계했습니다. 두 개의 손가락에 촘촘히 분포된 촉각 센서(12×32 텍셀)를 포함하고 있으며, 상단에 fisheye RGB 카메라가 부착되어 있어 촉각과 영상 정보를 동시에 수집할 수 있습니다. 이로 인해 실제 환경(in-the-wild)에서 사람이 직접 다양한 작업을 시연하며 시각-촉각 데이터를 수집할 수 있게 되었습니다.
Cross-modal Masked Autoencoder 기반 Visuo-Tactile Representation Learning 프레임워크 제안 핵심은 시각 정보와 촉각 정보를 단순히 결합(concatenation)하지 않고, 각 모달리티의 특성을 보존한 채로 교차 주의 메커니즘(cross-attention)을 통해 학습하는 것입니다. 특히 촉각 이미지를 무작위로 마스킹한 후, 이를 시각 정보로 보완하여 복원하는 방식으로, 두 센서 간의 상호 보완 관계를 강제로 학습하게 됩니다.
2.6M 프레임, 2700개 이상의 시연으로 구성된 대규모 Visuo-Tactile Dataset 구축 다양한 실내/외 환경(12곳)에서 43개 작업에 대한 촬영을 통해 정밀 조작 작업을 포함한 대규모 데이터셋을 수집하였으며, 실제 촉각/영상 동기화 방법으로 QR코드 기반 타임스탬프 정합 기법을 도입하여 고비용 장비 없이도 정밀한 멀티모달 수집이 가능했습니다.
✅ 정리하자면, 이 논문은 하드웨어, 데이터셋, 학습 구조를 모두 포함한 멀티모달 조작 학습의 end-to-end 전환점으로 볼 수 있으며, 기존 연구들보다 한 단계 높은 현실성, 확장성, 성능을 보여줍니다.
2.2 2. Visuo-Tactile Fusion 방식
2.2.1 📌 핵심 구조
입력 분리 처리
- 시각: CLIP ViT-B/16 백본을 사용해 768차원의 embedding 추출
- 촉각: 24×32 압력 행렬을 RGB 이미지로 인코딩 후, 작은 CNN을 통해 768차원의 embedding 생성
Cross-modal Attention
- 촉각이 시각을 쿼리하여 z_{\text{tac}} \rightarrow z'_{\text{tac}}로 업데이트
- 다시 시각이 업데이트된 촉각을 쿼리하여 z_{\text{img}} \rightarrow z'_{\text{img}} 생성
- 양방향 교차 주의를 통해 모달리티 간 정보를 서로 보완하고 조율
Masked Autoencoding 훈련 방식
- 입력 촉각 이미지의 60~80%를 마스킹 후 시각 정보를 이용해 전체를 복원
- reconstruction loss L_{\text{recon}} = |T - \hat{T}|^2을 사용 → 촉각 정보를 직접 복원하게 하여 단순한 피처 병합이 아닌 진정한 의미의 “융합” 학습
2.2.2 🧠 해석 가능성과 장점
- 시각적 주의 맵을 보면 대부분 접촉 위치나 물체와의 인터페이스 영역에 집중되어 있음
- 이 attention은 unseen 환경에서도 일관되게 나타나며, 학습된 시각-촉각 표현이 일반화됨을 보여줌
- 단순한 concat 방식보다 훨씬 더 정밀한 접촉 인식과 위치 추론이 가능
🔎 핵심 요약: cross-attention 구조 + reconstruction task의 조합은, 기존의 단순 early-fusion 기법보다 훨씬 정교하고 효과적인 멀티모달 표현을 가능하게 합니다.
2.3 3. 조작 정책 모델 구조
2.3.1 🔧 2단계 구조
Visuo-Tactile Encoder E_\phi(I, T)
- 앞서 설명한 cross-modal encoder
- 사전학습(pretraining) 후, 정책 학습 시에는 fine-tuning 가능
Diffusion Policy
- 조건부 확률 기반 행동 생성: p(a_t | z_t, p_t)
- 입력은 visuo-tactile embedding z_t와 proprioception p_t (gripper 상태 등)
- 정적인 MLP 대신 확률 기반 U-Net 모델로, 더 정교한 다중모드 행동 생성 가능
2.3.2 🤖 행동 생성 방식
- 행동 시퀀스를 직접 예측하는 것이 아닌 noise → action으로 변환하는 방식
- 학습 시 행동에 noise를 추가하고, 이를 역으로 제거하는 방식으로 학습 (Denoising Diffusion)
- 이로 인해 단일 행동 예측보다 더 정교하고 부드러운 행동 시퀀스 생성 가능
✅ 이 구조 덕분에 복잡한 조작에서도 행동이 한결 자연스럽고 신뢰성 있게 생성됩니다. 특히 접촉이 중요한 작업에서 작은 감각 피드백 차이도 반영할 수 있다는 점에서 큰 장점이 있습니다.
2.4 4. 학습 데이터 구성과 품질
2.4.1 📊 구성 개요
총 2.6M 프레임, 2700개 이상의 시연, 43가지 작업
분류:
- Main indoor tasks (38%) – 논문 실험용 핵심 작업
- Other indoor tasks (37%) – 다양한 보조 작업
- Outdoor tasks (25%) – 시장, 거리, 공원 등 in-the-wild 환경에서 수행
2.4.2 📷 수집 방식
GoPro 카메라 + 촉각 센서 동기화
- QR코드 기반 타임스탬프 정합으로 저비용/고정밀 동기화 구현
사람이 손으로 조작하며 수집
- 더욱 섬세하고 정교한 조작 포함 가능 (ex. 피펫 액체 옮기기, 연필 깎기)
2.4.3 📉 한계점
- 병렬 조작이 어려움: 2지 그리퍼 기준 수집되어 멀티 핑거 조작에는 제약
- 사람이 수집하고 로봇은 학습하는 구조이므로 domain gap 존재
- 촉각 센서 주파수 제한 (23Hz): 고속 slip, texture 분류 등은 어려움
🌟 하지만, 해당 데이터셋은 촉각-시각 학습을 위한 현실적이고 확장 가능한 기반을 제공하며, 이는 기존 연구에서 보기 드문 강력한 장점입니다.
2.5 5. 실험 설계 및 한계
2.5.1 🧪 주요 실험 작업 (4개)
- Test Tube Insertion: 집기 → 회전 → 슬롯 삽입
- Pencil Sharpening: 연필 회전 및 정렬 후 구멍 삽입
- Fluid Transfer: 피펫을 잡고, 부드럽게 짜서 액체 이동
- Whiteboard Erasing: 일정한 힘으로 칠판 닦기
→ 공통점: 정밀 접촉 및 힘 조절이 필요한 작업
2.5.2 🧪 실험 설계
- 20번의 반복 실험 per 작업
- 초기 상태 및 배경 변형을 통한 일부 generalization 테스트
- 세부 단계별(집기, 회전, 삽입 등) 성공률도 측정하여 분석의 정밀도를 높임
2.5.3 📊 성능 비교
| 방법 | Tactile 사용 | Cross-attn | Pretrain | Test Tube 삽입 성공률 |
|---|---|---|---|---|
| Vision Only | ❌ | - | ✅ | 25% |
| Vision + Tactile (no cross-attn) | ✅ | ❌ | ✅ | 50% |
| Vision + Tactile (no pretrain) | ✅ | ✅ | ❌ | 70% |
| Ours (full) | ✅ | ✅ | ✅ | 85% |
- Pretraining 및 Cross-attn이 정밀 조작 성공률을 2~3배 향상시킴
- 특히 Vision만 사용하는 경우, 투명 물체/미세 접촉에서 상황 판단 실패가 자주 발생
2.5.4 🧩 한계
- 실험은 모두 로봇 팔 기반 고정된 실내 환경에서 수행 → “진짜 in-the-wild” 배치는 아님
- 멀티태스크 통합 정책은 없으며, 각 작업별 개별 정책 학습
- diffusion 기반 정책은 계산량이 크므로 실시간 제어에 한계 가능성
✅ 그럼에도 불구하고, 실험 설계는 각 구성요소의 기여도를 정량적으로 잘 보여주며, 이 방식이 촉각 기반 조작에 의미 있는 성능 개선을 제공한다는 점을 설득력 있게 입증합니다.
2.6 ✍️ 결론 및 분석 요약
- 시각-촉각 통합 조작 학습이라는 어려운 문제를 하드웨어–데이터–학습 구조 측면에서 풀어낸 훌륭한 논문
- 특히 cross-modal fusion + reconstruction learning 방식은 기존 멀티모달 학습에서 모달리티 간의 정보 교환을 구조적으로 학습할 수 있게 한 큰 기여
- 수집된 데이터의 규모, 다양성, 품질 또한 타 연구 대비 매우 우수
- 다만 실제 배치 시 domain shift, 계산 비용, 멀티핑거 확장성 등의 과제는 남아 있음