📃DextrAH-G 리뷰
- 🤖 DextrAH-G는 Reinforcement Learning(RL)과 geometric fabrics, teacher-student distillation을 결합하여 시뮬레이션에서만 훈련된, 뎁스 이미지 기반의 정교한 로봇 팔-손 그립 정책입니다.
- 🛠️ 이 시스템은 고차원 공간, sim2real gap, 충돌 회피 등 주요 난제를 해결하며, geometric fabrics로 하드웨어 안전과 행동 유도를 보장하고, 교사-학생 증류(distillation)를 통해 실제 환경으로의 제로-샷 전이(transfer)를 성공시켰습니다.
- 🚀 DextrAH-G는 실제 환경에서 다양한 신규 물체를 성공적으로 파지 및 운반하며, 87%의 성공률과 분당 5.63회 처리가 가능한 최첨단 성능을 시연했고, 테스트 중 하드웨어 손상이 전혀 없어 높은 안전성을 입증했습니다.
1 Brief Review
DextrAH-G는 강화 학습(RL), Geometric Fabrics, 그리고 교사-학생 증류(teacher-student distillation)를 결합하여 시뮬레이션 환경에서만 학습하고 실제 세계에 제로-샷(zero-shot)으로 전이될 수 있는 깊이(depth) 기반의 능숙한 팔-손 로봇 조작(arm-hand grasping) 정책입니다. 이 연구는 고차원 관측 및 행동 공간, sim2real gap, 충돌 회피, 하드웨어 제약 등 관절형 팔-손 정책 학습의 주요 난제를 해결합니다. DextrAH-G는 23개의 모터를 가진 로봇이 스트리밍 깊이 이미지(streaming depth images)를 사용하여 다양한 물체를 고속으로 안전하게 연속적으로 잡고 운반할 수 있게 합니다.
이 연구의 주요 기여는 다음과 같습니다:
- 정책 학습을 위한 귀납적 편향(inductive bias)을 생성하고, 충돌을 피하며, 관절 제약을 유지하고, 행동을 형성하는 벡터화된 Geometric Fabric controller.
- 벡터화된 Geometric Fabrics 위에서 여러 다른 물체에 대한 고성능 조작을 가능하게 하는 시뮬레이션 전용 RL 훈련의 privileged FGP(Fabric-Guided Policy).
- 원래 행동을 복제하고 물체 위치 예측을 가능하게 하는 깊이(depth) 기반, 다중 모달(multi-modal) FGP의 privileged FGP 증류(distillation).
- 실제 세계의 다양한 새로운 물체에 대한 최신 능숙한 로봇 조작 성능을 달성한 DextrAH-G의 제로-샷 sim2real 전이(transfer).
1. Geometric Fabrics 및 Fabric-Guided Policies (FGPs)
Geometric Fabrics는 고전 역학 시스템의 행동을 일반화하여 설계 유연성, 조합성 및 안정성을 갖춘 제어기를 모델링할 수 있게 합니다. Geometric Fabric은 다음 형태의 방정식을 따릅니다: M_f (q_f , \dot{q}_f )\ddot{q}_f + f_f (q_f , \dot{q}_f ) + f_\pi (a) = 0 여기서 M_f \in \mathbb{R}^{n \times n}는 시스템의 우선순위를 포착하는 양의 정부호 시스템 메트릭(mass), f_f \in \mathbb{R}^n는 명목 경로 생성 Geometric Force, f_\pi (a) \in \mathbb{R}^n는 행동 a \in \mathbb{R}^m에 대한 추가 구동력입니다. q_f, \dot{q}_f, \ddot{q}_f \in \mathbb{R}^n는 Fabric의 위치, 속도, 가속도입니다. 이 방정식은 Fabric 상태 q_f와 \dot{q}_f를 시간에 따라 진화시키는 가속도 \ddot{q}_f를 생성합니다. f_\pi는 \ddot{q}_f에 영향을 미치므로 Fabric 상태에 영향을 줍니다.
Geometric Fabric controller는 네 가지 주요 이유로 사용됩니다:
- 원치 않는 충돌 회피,
- 정책 탐색을 동시에 유도하고 전체 로봇 움직임을 유리하게 형성하는 노출된 행동 공간을 통한 귀납적 편향 생성,
- 관절 제약 조건 준수,
- 운동학적 조작성을 촉진하기 위한 로봇 자세 유지.
충돌 회피(Collision Avoidance): 환경 및 자체 충돌 회피는 Geometric Fabric 항과 forcing Fabric 항을 통해 처리됩니다. 로봇의 기하학적 구조는 구(spheres)의 집합으로 모델링됩니다. x = \phi_{fk}(q) \in \mathbb{R}^3는 로봇 구성에서 각 구의 원점으로의 포워드 운동학 매핑입니다. \hat{n}_i = \frac{r_i-x}{\|r_i-x\|} \in \mathbb{R}^3는 구 점에서 충돌 물체 i의 가장 가까운 점 r_i \in \mathbb{R}^3까지의 방향입니다. d_i = \max(d_{min}, d_i) \in \mathbb{R}^+는 하한이 있는 거리입니다. Geometric 가속도는 \ddot{x} = k_g \|\dot{x}\|^2 \hat{\ddot{x}}_b이며, forcing 가속도는 \ddot{x} = k_f \hat{\ddot{x}}_b - b \dot{x}입니다. 여기서 \ddot{x}_b = - \sum_i \frac{1}{d_i}\hat{n}_i는 충돌에서 멀어지는 구당 기본 가속도 반응입니다. Fabric의 메트릭은 M = \beta e_d^2 \hat{M}_b로 설계되며, 여기서 e_d = \min_i\{d_i\}입니다. M_b = \sum_i s_i d_i \hat{n}_i \otimes \hat{n}_i는 구당 기본 메트릭 반응이며, s_i = \frac{1}{2} \tanh(-\alpha_1(v_i - \alpha_2) + 1)는 구가 충돌 물체 i로 향할 때 활성화되는 스무스 속도 게이트입니다(v_i = - \dot{x} \cdot \hat{n}_i).
행동 공간(Action Space): Allegro hand의 경우, 사람의 조작 데이터(human grasping motion data)를 Allegro hand에 리타겟팅(retargeting)하고 주성분 분석(PCA)을 적용하여 5차원 특성 조작(eigengrasp) 매니폴드를 생성합니다. PCA를 통해 얻은 처음 다섯 개의 주성분 A \in \mathbb{R}^{5 \times 16}을 사용하여 e_A = [0, A] \in \mathbb{R}^{5 \times 23}로 정의된 태스크 맵(taskmap) x = e_A q \in \mathbb{R}^5를 만듭니다. 이 공간에서 인력 Fabric 항을 정의하며, 메트릭 M(x) = mI이고 가속도 \ddot{x} = -k_a \tanh(\alpha_a\|x-x_{pca,target}\|) \frac{x-x_{pca,target}}{\|x-x_{pca,target}\|} -b \dot{x}입니다. x_{pca,target}는 5차원 손 행동 공간으로 사용됩니다. 팔 제어를 위해 팜(palm)에 부착된 7개의 3차원 점을 21차원 공간으로 매핑하는 새로운 태스크 맵을 생성합니다. 팔을 위한 6차원 행동 공간은 목표 팜 위치 x_{f,target} \in \mathbb{R}^3와 목표 팜 오리엔테이션(Euler angles) r_{f,target} \in \mathbb{R}^3로 구성됩니다. 전체 로봇에 대한 행동 공간은 총 11차원입니다.
관절 제약 조건(Joint Constraints): Fabric은 2차 제어기이므로, 관절 가속도 및 저크(jerk) 제한은 폐쇄형으로 처리될 수 있습니다. 다음 이차 계획(quadratic program)을 풀어 처리합니다: L = \frac{1}{2} (\ddot{q}_f - \ddot{q})^T M_f (\ddot{q}_f - \ddot{q}) + \alpha^2 \ddot{q}_f^T M_f \ddot{q}_f 여기서 \ddot{q}_f = -(M_f + \alpha I)^{-1}f_f이며, \alpha \rightarrow \infty일 때 ||\ddot{q}_f|| \rightarrow 0입니다. 또한, 관절 위치 제한은 Fabric의 관절 반발 항을 통해 적용됩니다.
자세 제어(Posture Control): 로봇의 제어되는 관절보다 Fabric의 노출된 행동 공간의 차원이 적기 때문에 중복성 문제(redundancy issues)를 해결해야 합니다. 이는 구성 공간(configuration space)의 기하학적 인력(geometric attractor)을 따름으로써 달성됩니다. Fabric이 로봇 전체 움직임을 구성 공간의 x_g로 안내하되, PCA 및 포즈 태스크 맵에서의 x_g로의 수렴을 방해하지 않습니다.
2. Teacher Privileged FGP 훈련 (강화 학습)
능숙한 조작은 강화 학습 문제로 간주되며, 시뮬레이션에서 privileged-state teacher policy가 140가지 다른 물체를 능숙하게 조작하도록 훈련됩니다. Geometric Fabric 행동 공간은 로봇이 안전하고 자연스러운 행동을 수행하도록 보장하므로, 보상 설계는 전적으로 손가락 끝-물체 접촉 및 물체를 목표 위치로 들어 올리는 데 중점을 둡니다.
- 비대칭 액터-크리틱(Asymmetric Actor Critic): 실제 세계에 배포될 때 제어 정책은 privileged 시뮬레이션 상태 정보에 접근할 수 없지만, privileged 정보는 시뮬레이션 훈련 속도를 높이는 데 사용됩니다. 크리틱 V(s)는 모든 privileged 상태 정보 s를 얻고, teacher policy \pi_{privileged}(o_{privileged})는 이 privileged 상태 정보의 제한된 부분인 관측 o_{privileged}를 얻습니다.
- Teacher policy의 관측 o_{privileged}는 로봇의 cspace 위치 q, cspace 속도 \dot{q} (총 23개), 팜의 세 지점 위치 x_{palm}, x_{palm-x}, x_{palm-y}, 4개 손가락 끝의 위치 x_{fingertips}, Fabric 상태 q_f, \dot{q}_f, \ddot{q}_f, 목표 물체 위치 x_{goal}, 그리고 노이즈가 있는 물체 위치 ex_{obj} 및 쿼터니언 eq_{obj}, 물체 one-hot embedding e를 포함합니다.
- 크리틱의 입력 상태 s는 o_{privileged}와 함께 로봇 관절력 f_{dof}, 손가락 끝 접촉력 f_{fingers}, 실제 물체 위치 x_{obj}, 실제 물체 쿼터니언 q_{obj}, 실제 물체 속도 v_{obj}, 실제 각속도 w_{obj}를 포함하는 privileged 상태 정보 s_{privileged}를 포함합니다.
- Teacher policy의 행동 a는 Underlying Geometric Fabric에 대한 입력으로, 목표 팜 위치 x_{f,target} \in \mathbb{R}^3, 목표 팜 오리엔테이션 r_{f,target} \in \mathbb{R}^3, 손가락의 목표 PCA 위치 x_{pca,target} \in \mathbb{R}^5로 구성된 11차원 벡터입니다. Fabric은 60Hz로 통합되고 시뮬레이션은 60Hz로 진행되며, Teacher policy는 15Hz로 실행됩니다.
- 강건한 조작을 위한 환경 수정(Environment Modifications for Robust Grasping):
- 랜덤 렌치 교란(Random Wrench Perturbations): 물체를 예측 불가능하게 움직이고 회전시키는 랜덤 렌치를 적용합니다. f_{perturb} = f_{scale} m u_f 및 \tau_{perturb} = \tau_{scale} I u_\tau (확률 p=0.1로).
- 포즈 노이즈(Pose Noise): 물체 포즈 관측에 비상관(uncorrelated) 및 상관(correlated) 노이즈를 추가하여 위치 및 기하학적 불확실성을 설명하고 손이 물체에 접근할 때 더 넓게 열리도록 유도합니다.
- 마찰 감소(Friction Reduction): 물체의 기본 마찰 계수를 \mu = 0.7로 줄여 마찰에 지나치게 의존하는 조작 행동을 완화합니다.
- 도메인 무작위화(Domain Randomization): 시뮬레이션 매개변수에 대한 도메인 무작위화를 사용하여 다양한 동적 스펙트럼에 걸쳐 강건한 정책을 학습합니다.
- 보상 함수(Reward Function): 보상은 개별 보상 항 r = \sum_i w_i r_i의 가중 합으로 정의됩니다.
- r_{to-obj} = \text{minimize}(\|x_{fingertips} - x_{obj}\|)
- r_{lift} = \text{minimize}(z_{lifted} - z(x_{obj})) \times (1 - \text{lifted}(x_{obj}))
- r_{lifted} = \text{lifted}(x_{obj}) (첫 번째 타임스텝)
- r_{to-goal} = \text{minimize}(\|x_{goal} - x_{obj}\|) \times \text{lifted}(x_{obj})
- r_{reached} = \mathbb{1}(\|x_{goal} - x_{obj}\| < d_{success})
- r_{success} = \mathbb{1}(r_{reached} = 1 \text{ for } T_{success} \text{ consecutive timesteps}) \times (T_{max} - T) 여기서 \text{minimize}(e) 함수는 오차 e가 현재까지의 최소 오차 e_{smallest}보다 작아질 때만 양의 보상을 제공합니다. \mathbb{1}(c)는 조건 c가 참이면 1, 아니면 0입니다. 환경은 물체가 테이블 아래로 떨어지거나, r_{success} 보상을 받거나, 에피소드 시간 제한에 도달하면 리셋됩니다.
3. Student Depth FGP 훈련 (정책 증류)
교사-학생 프레임워크와 온라인 DAgger[23]를 사용하여 전문가 정책을 실제 세계에 배포할 수 있는 학생 정책으로 증류합니다. 이 증류는 15Hz로 연속적인 이미지 입력을 사용하여 실제 세계에서 반응적이고 동적인 조작을 수행하는 pixels-to-action 정책을 만듭니다.
- 입력 및 출력: 증류 중 학생 정책 \pi_{depth}(o_{depth})는 로봇 상태 o_{robot}, 목표 위치 x_{goal}, 그리고 원시 깊이 이미지 I \in [0.5, 1.5]^{160 \times 120}m를 포함하는 관측 o_{depth}를 받습니다. 학생은 행동 \hat{a} \in \mathbb{R}^{11}과 물체 위치 예측 \hat{x}_{obj} \in \mathbb{R}^3을 출력합니다.
- 손실 함수(Loss Function): 학생은 감독 손실 L = L_{action} + \beta L_{pos}로 훈련됩니다. 여기서 L_{action} = \|\hat{a} - a\|^2이고 L_{pos} = \|\hat{x}_{obj} - x_{obj}\|^2입니다. a는 teacher policy \pi_{privileged}가 예측한 행동이고 x_{obj}는 시뮬레이터의 ground-truth 물체 위치입니다.
- 깊이 이미지 증강(Depth Image Augmentations): 시뮬레이션에서 렌더링된 깊이 이미지에 픽셀 드롭아웃, 랜덤 값 설정, 선형 세그먼트(robot wires mimic), 비상관/상관 깊이 노이즈 모델 등 다양한 증강이 추가됩니다.
4. 실험 및 결과
- 시뮬레이션: \pi_{depth}는 140개의 훈련 물체에 대해 평균 99%의 성공률을 기록하여 \pi_{privileged}의 성능과 거의 일치합니다. 물체당 평균 80%의 성공률을 보였습니다.
- 실제 세계(Real-World):
- 하드웨어 설정: Allegro Hand가 Kuka LBR iiwa arm에 장착되어 있고, Intel Realsense D415 카메라가 테이블에 고정되어 있습니다. 로봇은 23개의 독립적인 모터를 가지며, 단일 카메라 스트림을 정책 입력으로 사용합니다. 관절 PD 제어기는 팔에 대해 1kHz, 손에 대해 333Hz로 작동합니다. Geometric Fabric은 60Hz로, \pi_{depth}는 15Hz로 작동합니다.
- 단일 물체 조작 평가(Single Object Grasping Assessment): 11개의 표준 물체에 대해 시도당 5번의 조작을 수행한 결과, DextrAH-G는 Table 1에 보고된 바와 같이 새로운 최첨단 조작 성공률을 달성했습니다. 예를 들어, Pitcher는 80%, Pringles는 100%, Coffee Container는 100%, Cup은 80% 등의 성공률을 보였습니다.
- 빈 패킹 평가(Bin Packing Assessment): 30가지 이상의 다양한 물체를 연속적으로 잡고 옆에 놓인 빈으로 운반하는 테스트입니다.
- 연속 성공(CS): DextrAH-G는 8번의 시도에서 평균 6.56 ± 2.41개의 물체를 연속적으로 운반했습니다.
- 사이클 시간(Cycle time): 평균 10.66 ± 0.84초, 즉 분당 5.63회 집기(PPM)의 속도를 기록했습니다.
- 성공률: 총 256번의 시도 중 87%의 성공률로 모든 물체를 성공적으로 잡고 운반했습니다.
DextrAH-G는 이러한 결과를 통해 능숙한 로봇 조작 분야에서 최첨단 성능을 크게 발전시켰으며, 실제 세계 응용에 더 가까워졌습니다. 수많은 테스트 시간 동안 하드웨어 손상은 발생하지 않았습니다.
5. 한계(Limitations)
DextrAH-G의 한계는 다음과 같습니다:
- FGP가 손가락 제어를 위해 PCA 태스크 맵에서 목표를 발행하므로 로봇의 운동학적 민첩성을 제한합니다.
- 모델 기반 행동에 대한 의존도를 줄이기 위해 감각 입력 기반의 장애물 회피 행동이 학습되어야 합니다. Fabric의 장애물 회피는 로봇이 테이블과 심각하게 충돌하는 것을 막지만, 저자세 물체에 대한 효과적인 탐색을 어렵게 하여 성능을 저하시킵니다.
- 장면에서 한 번에 하나의 물체만 처리할 수 있으며, 복잡한 환경에서 효과적으로 작동하려면 분할(segmentation)과 같은 추가 변경이 필요할 수 있습니다.
2 Detail Review
2.1 논문의 주요 기여점 요약
이 논문에서는 DextrAH-G라는 새로운 dexterous 로봇 파지(grasping) 방법을 제안하며, 이는 23자유도 로봇 팔-손이 depth 카메라 입력만으로 다양한 물체를 빠르고 안전하게 파지할 수 있는 픽셀-투-액션 정책이다. 주요 기여사항은 다음과 같다:
- 벡터화된 기하 패브릭 제어기 도입: RL 정책의 행동 공간(action space)으로 기하 패브릭(geometric fabric) 기반 제어기를 설계하였다. 이를 통해 정책 학습에 강력한 inductive bias을 제공하고, 로봇의 충돌 회피 및 관절 한계 준수를 보장함으로써 로봇 움직임을 안정적이고 자연스럽게 형성할 수 있었다.
- 시뮬레이션 기반 교사 정책 학습: 특권 정보(privileged information)를 활용하는 교사 FGP(fabric-guided policy)를 시뮬레이션에서만 강화학습으로 훈련하였다. 이 교사 정책은 앞서 언급한 패브릭 제어기 위에서 동작하여, 다양한 물체들에 대한 고성능 파지 동작을 학습하는 데 성공하였다.
- 학생 정책 증류(distillation): 심도 카메라 등의 멀티모달 관찰에 기반한 학생 FGP를 훈련하여, 교사 정책의 행동을 모방함과 동시에 물체의 위치까지 추론(predict)하도록 하였다. 이 온라인 지식 증류 과정을 거친 학생 정책은 교사의 원래 성능을 재현하면서도 실세계 센서 입력으로 동작 가능하게 된다.
- 제로샷 실환경 적용: 학습된 학생 정책을 현실 로봇에 별도의 추가 튜닝 없이 바로 적용함으로써, 다양한 새로운 물체들에 대해 최고 수준(state-of-the-art)의 파지 성공률을 달성하였다. 이는 복잡한 형태의 물체도 사람처럼 잡을 수 있는, 이른바 “잡을 수 있는 것은 무엇이든 잡는(grasp-anything)” 능력에 한 걸음 다가선 성과로 평가된다.
2.2 사용된 기술/모델 및 아키텍처 분석
DextrAH-G의 핵심은 세 단계로 구성된 교사-학생 학습 프레임워크와, 이를 뒷받침하는 기하 패브릭 기반 제어 아키텍처이다. 먼저, 기하 패브릭 제어기란 비선형 기하학에 기반한 2차 동역학 제어기로서, 로봇의 움직임에 안전성과 안정성을 내재화한 기술이다. 이 제어기는 로봇 관절의 한계를 자동으로 고려하고, 자가 충돌 및 환경 충돌을 회피하며, 전역적으로 안정적인 경로로 로봇을 움직이게 한다. 또한 고차원 관절계를 저차원 행동 공간으로 노출시켜 제어 문제를 단순화하고, 다중 관절의 여유 자유도(redundancy)도 효율적으로 해소한다. 이러한 속성 덕분에, DextrAH-G에서는 학습된 RL 정책의 출력을 곧바로 로봇 모터에 보내지 않고 패브릭 제어기를 중간 계층으로 사용한다. 정책은 패브릭 상의 목표 동작(예: 손가락 끝 위치나 힘)을 출력하고, 패브릭 제어기가 이를 받아 로봇에게 안전한 실제 관절 명령으로 변환한다. 이는 일반적인 강화학습 정책이 종종 과격한 속도 명령이나 충돌 유발 동작을 내는 문제를 완화하며, 하드웨어 제약을 만족시키도록 명령을 가로채 변환하는 제어 계층을 둔다는 로봇 RL의 모범적인 설계와 일치한다. 특히 NVIDIA 연구진은 이러한 기하 패브릭 제어기를 대규모 병렬 RL 훈련에 사용 가능하도록 벡터화(vectorization)하여, 시뮬레이션 훈련부터 실제 배치까지 동일한 제어 로직을 일관되게 적용할 수 있음을 보였다. 그 결과 RL 정책이 패브릭 제어기와 함께 훈련되므로, 학습 단계에서부터 안전한 동작만 탐색하게 되고 sim2real 차이도 최소화된다.
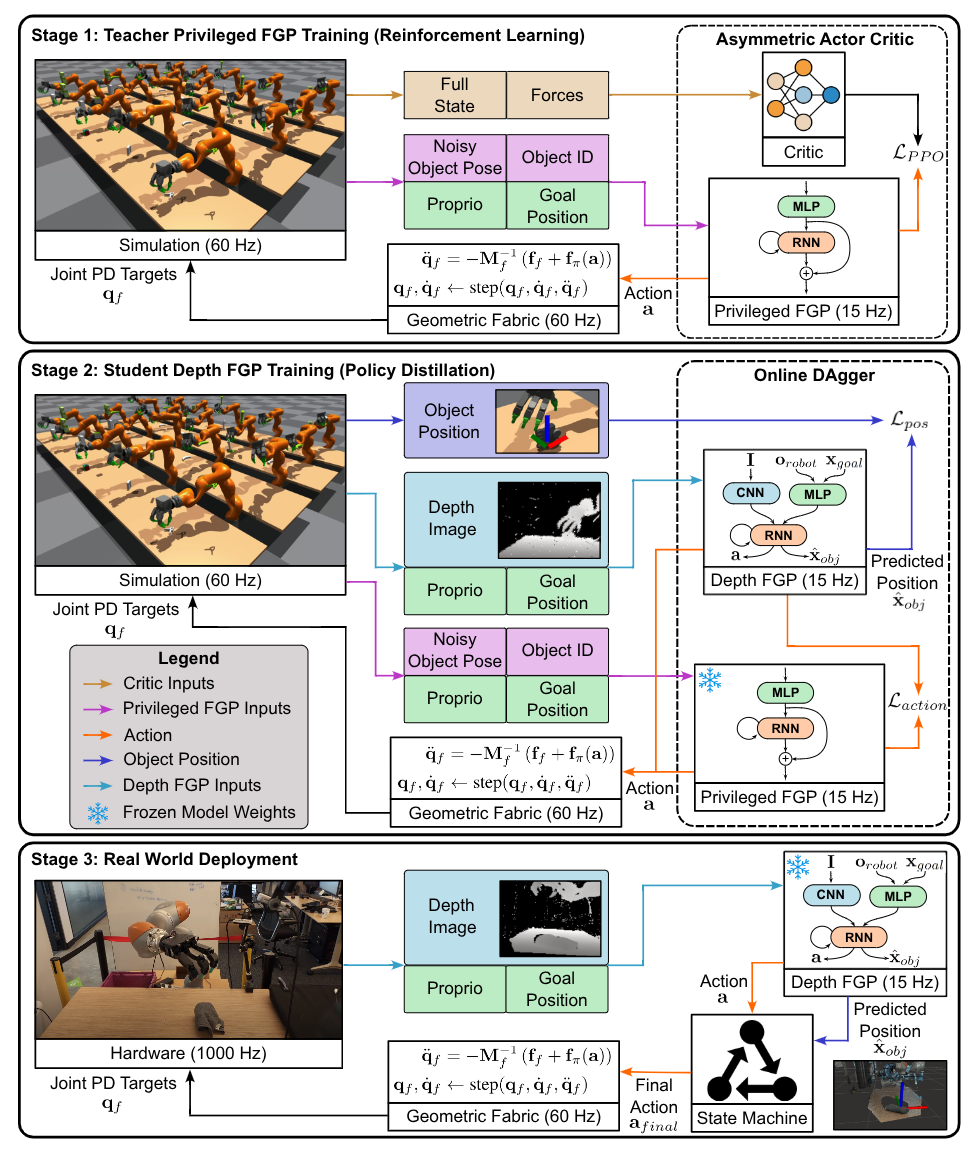
DextrAH-G의 학습 과정은 다음의 3단계 파이프라인으로 이루어진다:
교사 정책 학습 (Privileged Teacher FGP): 시뮬레이터 상에서 강화학습(RL)으로 교사 정책을 훈련한다. 이때 비대칭 Actor-Critic 기법을 사용하여, 크리틱(가치망)에는 물체의 정확한 위치 등 모든 상태 정보를 제공하고 액터(정책)에는 로봇의 관절 상태나 노이즈가 추가된 센서 정보 등 제한된 관찰 정보만을 주는 방식으로 학습시킨다. 이를 통해 교사 정책은 현실에서도 이용 가능한 입력만으로 동작하면서도, 시뮬레이션에서는 충분한 정보로 효율적으로 학습할 수 있다. 학습 알고리즘으로는 Proximal Policy Optimization(PPO) 기반의 대규모 병렬 학습을 활용하였으며, LSTM 기반의 순환신경망 정책을 구성하여 부분 관측 상황에서도 메모리를 활용해 의사결정을 할 수 있게 했다. 특히 LSTM 층에는 skip-connection을 추가하여 출력값을 잔차 형태로 처리함으로써 순환신경망 학습의 안정성을 높였다. 또한 시뮬레이션 환경에서는 현실 적응력을 높이기 위해 다양한 도메인 랜덤화가 적용되었다. 예를 들어, 매 학습 에피소드마다 물체에 임의의 힘과 토크를 가해 위치를 흩뜨려보고, 물체 상태와 센서 관측에 노이즈를 추가하여 부분 관측 하에서도 견실한 파지 동작을 학습하도록 했다. 로봇의 물리 파라미터(질량, 마찰계수 등) 역시 범위를 두고 무작위로 변화시켜서 시뮬레이터와 현실 간 차이를 줄였다. 이렇게 훈련된 교사 FGP 정책은 시뮬레이터 내에서 다양한 물체에 대해 높은 성공률로 파지 및 조작을 수행할 수 있게 된다.
학생 정책 학습 (Depth Student FGP Distillation): 두 번째 단계에서는, 앞서 얻은 교사 정책을 시연자(expert)로 삼아 학생 정책을 학습시킨다. 교사 정책과 동일한 환경에서 온라인 증류(distillation) 방법인 DAgger를 활용하여, 교사가 실행한 행동을 학생이 모방하도록 학습을 진행한다. 학생 정책은 연속적인 심도 영상을 주요 입력으로 받도록 설계되었으며, 약 15Hz 주기로 이미지를 받아들여 그때그때 상황에 반응하는 폐루프 정책을 학습한다. 학생 정책의 관측에는 로봇의 관절 상태 등의 proprioception도 포함되어 있으며, 심도 영상으로부터 물체의 위치를 추정하는 보조 출력도 내도록 멀티태스크 학습시켰다. 즉 학생 정책은 매 시각 심도 카메라 영상과 자기센서 값으로 현재 상황을 파악하고, 다음 순간 로봇 팔과 손가락에 줄 명령을 출력함과 동시에 현재 물체의 예상 위치도 추론하여 보고한다. 이러한 설정은 실제 환경에서 물체가 보이지 않게 되는 가림(occlusion) 상황에서도 proprioception과 과거 정보를 활용해 물체 위치를 끝까지 추적할 수 있도록 하기 위함이다. 한편 학생 정책 학습시에도 시뮬레이션 심도 영상에 랜덤 노이즈, 잡음 객체 등을 추가하여 현실 카메라 화질과 최대한 유사하게 맞추는 기법을 사용하였다. 이 과정을 통해 결과적으로 학생 FGP는 교사 정책에 필적하는 성능을 가지면서도 픽셀 단위의 센서 입력만으로 동작하는 정책으로 거듭난다.
실세계 배치 (Zero-Shot Deployment): 마지막으로, 이렇게 획득한 학생 정책을 현실 로봇에 이식한다. 시뮬레이션에서 학습된 모델을 별도 추가 학습이나 미세조정 없이 바로 제로샷(sim2real)으로 적용하는 것이 특징이며, 이는 앞서 사용된 기하 패브릭 제어기 덕분에 가능했다. 실제 로봇 하드웨어는 KUKA LBR iiwa 7-자유도 로봇팔에 Allegro 다관절 로봇 손(4 finger, 16 DOF)을 장착한 구성으로, 총 23개의 모터를 가진 플랫폼이다. 테이블 위에 Intel Realsense D415 깊이 카메라 한 대를 고정 설치하여 작업 공간을 내려다보게 했고, 이 단일 카메라 영상 스트림이 정책의 주된 시각 입력이다. 로봇 제어는 ROS 2 기반으로 구현되었으며, 팔과 손에 각각 1kHz와 333Hz 주기의 저수준 PD 제어기가 동작하고 있다. 학습된 FGP 정책 모듈은 별도 노드로 실행되어 15Hz 주기로 카메라 이미지와 로봇 상태를 받아 액션을 출력하며, 기하 패브릭 제어기는 또 다른 노드에서 60Hz 주기로 실행되어 정책이 보낸 액션 명령을 실제 관절 명령으로 변환한다. 이처럼 정책과 패브릭 제어를 모듈화하여 병렬 실행함으로써, 설령 정책 모듈이 일시적으로 지연되거나 비정상 동작하더라도 패브릭 제어기가 로봇 움직임의 안전성을 지속적으로 관리할 수 있게 설계되었다. 결과적으로 DextrAH-G는 현실 환경에서 교사 정책을 모사한 학생 정책 + 패브릭 제어기 조합으로 구동되며, 시뮬레이션에서 보여준 높은 성능을 현실에서도 이어갈 수 있게 된다.
2.3 실험 설정 및 결과 분석
DextrAH-G의 성능은 시뮬레이션과 실환경 모두에서 면밀히 평가되었다. 먼저 시뮬레이터상에서 학습된 교사 정책은 140개의 훈련 물체들에 대해 에피소드 기준 99% 이상의 성공률을 보였으며, 개별 물체 기준으로도 평균 80% 수준의 성공률을 달성했다. 학생 정책으로 증류한 후에도 시뮬레이터에서 교사 대비 근소한 성능 저하만 나타났을 뿐 대체로 유사한 파지 성공률을 유지했으며, 이는 sim2real 이전 단계에서 이미 정책 성능이 충분히 확보되었음을 의미한다.
실세계 평가는 두 가지 프로토콜로 진행되었다. 첫째, 단일 객체 파지 평가(single object grasping)로 표준 벤치마크에 준거한 실험이다. 여러 가지 대표적인 형태의 물체 11종을 선정한 후, 각 물체를 테이블 위에 다섯 번씩 임의의 자세로 배치하고 로봇이 이를 집어 들게 하여 성공 여부를 측정하였다. 만약 첫 시도에 실패해도 로봇이 연속적으로 재시도하도록 하여, 정책의 지속적인 적응 능력도 평가했다. 그 결과 DextrAH-G는 대부분의 물체에서 5회 시도 내 100%에 가까운 성공률을 기록하며, 새로운 최고 성능을 달성했다. 구체적으로, 물체별 평균 성공률이 80%~100% 사이였고, 예를 들어 머그컵이나 과자 상자(직육면체)의 경우 기존 방법(Matak 등)은 0% 성공에 그쳤던 반면 DextrAH-G는 100% 성공을 거두었다는 보고가 있다. 이러한 결과는 DextrAH-G의 견고한 일반화 능력을 보여주는 것으로, 한정된 훈련 세트로 학습했음에도 불구하고 처음 보는 형태의 물체까지 실시간 파지가 가능함을 입증한다. 다만 이 단일 객체 평가는 속도나 연속 작업 상황을 반영하지 못하기 때문에, 논문 저자들은 추가로 연속 작업 평가를 제안하였다.
둘째 평가로 빈(pack) 채우기 연속 파지 테스트를 수행하였다. 이는 로봇이 다양한 물체들을 연달아 집어서 옆 상자에 옮기는 작업을 지속적으로 수행하도록 하는 시나리오로, 실제 산업용 피킹 작업을 방불케 하는 응용 맥락을 실험에 도입한 것이다. 로봇 앞 테이블에 30여 종류의 다양한 물체를 무작위로 놓고 한 번에 하나씩 집어 들게 한 다음, 잡은 물체를 옆의 빈(bin) 상자에 떨어뜨리면 다시 새로운 물체를 잡는 식으로 실시간 연속 작업을 진행하였다. 이러한 한 사이클(집기-이동-놓기)에 걸리는 평균 시간(cycle time)과 연속 성공 횟수, 그리고 종합 성공률이 성능 지표로 사용되었다. 총 8회에 걸친 연속 테스트 결과, DextrAH-G는 평균 6.56회 연속 성공(한 번 실패하기 전까지 연속 집어 옮긴 물체 수, 95% 신뢰구간 ±2.41)으로 여러 물체를 연속 처리할 수 있음을 보였다. 사이클 타임은 한 사이클당 평균 10.66초(표준편차 ±0.84초)로 측정되었는데, 이는 분당 약 5.63개의 물체를 옮길 수 있는 속도에 해당한다. 총 256번의 집기 시도 중 87%에서 최종적으로 물체를 성공적으로 옮기는 데에 성공하여, 종합 성공률 87%를 기록하였다. DextrAH-G는 이처럼 높은 신뢰도(87% 성공)와 빠른 동작 속도(5.6 PPM)를 동시에 달성함으로써, 현재까지 보고된 덱스터러스 로봇 손 파지 연구 중 가장 뛰어난 속도-정확도 트레이드오프를 달성했다는 평가를 받는다. 저자들은 이러한 신속성과 신뢰성의 조합이 실제 활용에 한 걸음 다가선 성능 지표라고 강조하며, DextrAH-G의 연속 작업 사이클 타임이 이미 실용적 기준에 근접했다고述하고 있다. 참고로 산업공정 분석에 따르면 인간 작업자의 이상적인 피킹 속도는 분당 약 16.5회 정도로 추산되는데, DextrAH-G는 현재 그보다 약간 느리지만(≈5.6회/분) 개선 여지를 충분히 가지고 있으며 가까운 미래에 속도를 더욱 높일 수 있을 것으로 기대된다. 실제로 논문에서는 연속 동작 중에도 로봇에 어떤 손상도 발생하지 않았으며, 수 시간 동안 수백 회에 걸친 테스트에도 하드웨어 고장이나 파손 없이 원활하게 작동했음을 보고하고 있어, 안전성 측면에서도 본 기법의 우수함을 보여주었다.
2.4 기존 연구와의 비교 및 차별점
DextrAH-G는 기존의 덱스터러스 그리퍼 연구들과 여러 면에서 차별화된다. 먼저 접근 방법의 차이가 두드러진다. 과거의 전통적인 로봇 파지 기법들은 주로 시각적 인식을 통한 그립 포즈 선정에 집중하고, 선정된 자세로 로봇을 움직이기 위해 모델 예측 제어(MPC)나 경로 계획 알고리즘을 사용하는 계층적 접근이 많았다. 이러한 방식은 개별 동작 단계(탐지-접근-파지)로 분리되어 있어 어느 정도 성과를 보였지만, 실시간으로 연속적으로 반응하지 못하고 일회성 실행에 그치는 경우가 대부분이었다. 예를 들어 팔의 전체 관절 자유도를 모두 활용하여 파지 지점을 향해 유연하게 접근하거나, 파지 후에 손가락과 팔을 조화롭게 재조정하는 등의 능력이 부족했다. 반면 DextrAH-G는 한 번에 끝까지 계획을 세우는 대신, 센서 데이터가 들어올 때마다 15Hz로 계속 재계획 및 제어한다는 점에서 진정한 실시간 폐루프 제어를 구현하였다. 카메라 영상과 로봇 관절 센서 등 모든 정보원을 통합(fuse)하여 고주파수 제어 명령을 생성함으로써, 부분 관측 환경에서 발생하는 불확실성에 대응하고 파지 동작의 성공률을 향상시킨 것이다. 이는 기존 방식과 달리 항상 주변을 감지하고 즉각 피드백을 반영하므로, 물체가 미끄러지거나 움직이더라도 신속히 보정할 수 있다는 강점이 있다.
학습 기반 기법들의 입력과 모델 의존성 측면에서도 중요한 차이가 존재한다. 기존의 많은 딥러닝/강화학습 기반 덱스터러스 파지 연구들은 심층 센서 데이터의 한계 또는 사전 지식에 대한 의존을 가지고 있었다. 예를 들어, 3D 물체 모델로부터 수십만 건의 합성 파지 데이터셋을 만들고 학습하거나, 물체의 CAD 모델을 미리 알고 있어야만 사용할 수 있는 분석적 지표(예: form closure, force closure 등)를 활용하기도 했다. 일부 최신 연구들은 전체 물체의 포인트클라우드를 입력으로 받아 파지 후보를 생성하고 RL 정책으로 집는 시도를 했으나, 실제 적용 시에는 물체의 정확한 3D 모델을 알아야 하거나 센서 점구름과 그 모델을 정합(registration)해야 하는 어려움이 있어 범용성이 떨어지는 문제가 있었다. 예를 들어 Liu 등(2023)은 손-물체 상호작용을 표현하는 새로운 피처를 제안했지만, 실제로는 물체의 CAD 모델을 센서 데이터에 맞춰 정렬해야 했기 때문에 현실에서는 적용이 제한적이었다고 보고한다. 그 외에도 Agarwal 등(2023)은 이미 학습된 비전 트랜스포머(DINO-ViT) 특징으로 물체를 분류하여 사전 정의된 손 자세(eigengrasp)로 잡는 RL 정책을 제시했으며, Qin 등(2022)은 특정 범주(category)의 물체들에 대해서만 동작하는 포인트클라우드 기반 RL 정책을 선보였다. 이들은 모두 흥미로운 접근이지만, 특정 상황에 특화되어 있거나 시뮬레이션에 한정되는 경우가 많았다. DextrAH-G는 이러한 제약을 대폭 완화하여, 단 한 대의 심도 카메라로부터 얻은 깊이 영상과 로봇의 관절각 등의 proprioception만으로 팔과 손을 동시에 제어하는 일원화된 정책을 학습시켰다. 물체의 CAD 모델이나 사전 촬영 데이터베이스 없이도 동작하며, 한 번 학습되면 카테고리에 상관없이 새로운 물체에도 바로 적용 가능함을 실제로 시연한 것이 큰 차별점이다. 요약하면, DextrAH-G는 센서리얼(sim-to-real) 관점에서 훨씬 간결하고 실용적인 입력만으로 훈련되었음에도 기존 기법들보다 뛰어난 범용 파지 능력을 보여준다.
제어 및 안전성 측면에서도 DextrAH-G는 기존 연구들과 다른 철학을 취하고 있다. 전통적인 RL 기반 로봇 정책은 주로 조인트 PD 제어기나 OSC(작업공간 제어) 같은 단순 제어기에 명령을 보내는 형태로 작동했다. 이렇게 낮은 수준의 단순 제어를 쓰면 구현은 쉽지만, 로봇 행동의 모든 세부를 학습된 정책이 담당해야 하므로 학습 난이도가 크게 증가하고, 자칫 충돌 회피나 관절 한계 준수같이 중요한 안전 요소들이 정책에 의해 제대로 학습되지 않을 위험이 있다. 실제로 고차원 행동 우주에서 복잡한 우선순위(목표 달성, 하드웨어 보호, 자연스러운 움직임 등)를 신경망 하나로 모두 발견해내는 것은 극히 어렵기 때문에, 정책이 최적화 과정에서 편협한 해법(local optima)에 빠지거나 예상치 못한 부자연스러운 동작을 만들어내기 쉽다. DextrAH-G는 이러한 문제를 해결하기 위해, 제어기 쪽에 많은 지능을 미리 넣어두는 방식을 채택했다. 앞서 설명한 기하 패브릭 제어기가 바로 그런 역할을 하며, 이 고도화된 제어 레이어가 알아서 충돌을 피하고 관절 제약을 지키며 손가락 말단의 움직임을 의미있는 방식으로 유도해준다. 실제 Van Wyk 등(2024)의 선행 연구에서는 이 패브릭 제어기를 활용해 손가락 끝이 물체를 향하도록 자연스럽게 끌어당기는 힘을 적용하고 관절각 제한을 자동 처리함으로써, 복잡한 다관절 손 내 물체 재배열 작업에서 새로운 SOTA 성능을 낸 바 있다. DextrAH-G 역시 이러한 패브릭 가이드 정책(FGP) 접근을 계승하여, RL 정책이 주요 목표 달성에만 집중해도 될 만큼 다른 부수적인 행동들은 제어기가 책임지도록 만들었다. 그 결과 보상 함수를 단순화할 수 있었고(예: 충돌 최소화 등의 보조 보상을 크게 신경쓰지 않아도 됨), 정책 최적화도 수월해졌다. 더 중요한 점은, 패브릭 제어기가 정책의 과격한 출력으로부터 로봇을 보호해주기 때문에 훈련된 정책을 실제 로봇에 적용할 때 안전성이 확보된다는 것이다. 논문에서도 이전 세대 RL 정책들은 실험 중 모터가 과열되고 연기가 나는 고장을 겪기도 했으나, DextrAH-G에서는 패브릭 제어층 덕분에 그런 사태 없이 자유롭게 실험을 반복할 수 있었다고 언급된다. 요컨대, DextrAH-G는 학습과 제어의 긴밀한 통합을 통해 기존 연구들이 직면했던 안전-성능 딜레마를 해결하고자 한 점에서 차별화되며, 이러한 모델 기반 + 학습 혼합 전략은 복잡한 로봇 기술 학습에 있어 한 방향성을 제示하고 있다.
성능 비교 측면에서도 DextrAH-G의 우수성은 돋보인다. 단일 객체 파지 평가에서 제시된 성공률 수치만 보더라도, DextrAH-G는 기존의 거의 모든 방법들을 능가하는 결과를 얻었다. 예컨대, Dex-_diffuser 기반 생성모델 방법이나 ISA-Grasp, Matak 등의 기존 기법들이 각각 제한된 물체군에서 40~80% 정도의 성공률을 보고한 데 비해, DextrAH-G는 모든 평가 물체에 대해 80% 이상 (대부분 100%)의 성공률을 시현하였다. 연속 파지 시험에서도 87%의 종합 성공률과 5.6 PPM의 속도로 명확한 우위를 보였으며, 논문 저자들은 이러한 신뢰도와 속도의 조합이 현 시점 덱스터러스 파지의 새로운 SOTA임을 강조하고 있다. 요컨대, DextrAH-G는 학습 기반의 범용 파지 정책임에도 불구하고 기존의 특화된 방법들(예: 특정 물체군 전용 RL, 사전 모델 기반 계획 등)을 능가하는 성능과 범용성을 동시에 달성하여 두각을 나타낸다. 또한 sim-to-real 측면에서도, 다른 많은 연구들이 현실 적용을 위해 추가 튜닝이나 도메인 적응 단계를 필요로 한 반면 DextrAH-G는 한 번의 시뮬레이터 학습으로 곧장 현실 로봇에 투입하여 성과를 냈다는 점에서 실용적인 우월성이 있다. 이런 차별점들 덕분에 DextrAH-G는 “픽앤플레이(pick-and-play)”에 가까운 범용 로봇 파지 시스템의 가능성을 보여준 것으로 평가된다.
2.5 장점과 한계점
2.5.1 장점
- 탁월한 성능과 범용성: DextrAH-G는 다양한 형태·크기의 물체 30여 종에 대해 87%의 높은 파지 성공률을 달성하며, 현재까지 보고된 덱스터러스 파지 기술 중 최고 수준의 성능을 보여준다. 심도 카메라 한 대만으로 동작하면서도 이전 방법들이 다루기 어려웠던 불특정 다수의 새로운 물체들을 제약 없이 파지해 보임으로써, 향후 범용 로봇 파지(grasp-anything)에 한 발 다가선 성과를 이뤘다.
- 빠른 작업 속도: 본 시스템은 한 사이클(집기-운반-복귀)에 평균 10.66초밖에 걸리지 않아 분당 약 5.6회의 연속 집게 작업을 수행할 수 있었다. 이러한 사이클 타임 단축은 다관절 로봇 손으로 이루어지는 파지 작업에서는 매우 고무적인 결과로, 산업적 활용에도 근접한 속도이다. (인간 작업자의 이상적 파지 속도가 약 16.5회/분으로 추정되는 것에 비하면 약 1/3 수준이지만, 현재 로봇 손으로 달성한 속도 중에서는 최고 수준이며 추가 개선의 여지가 있다.)
- 안전한 연속 동작: DextrAH-G의 정책 출력은 항상 기하 패브릭 제어기를 거쳐 로봇을 구동하므로, 로봇을 무리한 동작으로부터 보호하는 장치가 내재되어 있다. 실제 여러 시간에 걸친 수백 회의 실험 동안 모터과열이나 기구 손상 없이 시스템을 운영할 수 있었으며, 실험자들이 로봇 파손에 대한 우려 없이 정책을 자유롭게 테스트할 수 있었던 점은 큰 장점이다. 이전 세대의 RL 정책들이 종종 급격한 관절 움직임으로 하드웨어에 부담을 주었던 것과 달리, DextrAH-G는 연속적인 반응 속도를 유지하면서도 충돌 회피와 관절 제한을 준수하여 안정적인 동작을 보장한다.
- 학습 효율성과 현실 적용 용이성: DextrAH-G는 전체 학습을 시뮬레이션에서 완료함으로써, 비싼 현실 로봇을 사용한 데이터 수집 없이도 고성능 정책을 얻어냈다. 도메인 랜덤화, 교사-학생 증류 같은 기법을 통해 sim2real 격차를 성공적으로 극복한 덕분에, 추가 실환경 학습 없이도 바로 현실 투입이 가능했다는 점은 실용적인 매력이다. 이는 향후 유사한 로봇 과제들에서도 시뮬레이터 기반 대량 학습 → 현실 즉시 배치의 워크플로를 활용할 수 있다는 희망을 준다. 또한 패브릭 제어기 덕분에 복잡한 보상 설계나 제약 조건을 일일이 벌점으로 학습시키지 않아도 되어 RL 학습 난이도 자체도 완화된 측면이 있다.
- 자연스럽고 조화로운 동작: 패브릭 제어기가 로봇의 운동을 글로벌하게 최적화된 경로로 유도해주기 때문에, DextrAH-G의 팔과 손 동작은 비교적 부드럽고 일관된 모션을 보여준다. 기존의 일부 RL 정책들은 목표 달성에는 성공해도 사람이 보기에는 부자연스러운 자세를 취하거나 불안정한 동작을 보이는 경우가 있었는데, DextrAH-G는 안정적이고 사람 손과 유사한 움직임 패턴으로 물체를 잡고 옮겨 로봇 동작의 품질 측면에서도 진전을 이루었다. 이는 패브릭 제어를 통해 자연스러운 손가락 접촉 경로를 형성하고 관절 움직임을 매끄럽게 보간해준 결과로 볼 수 있다.
2.5.2 한계점
- 손가락 운동 범위의 제한: 현재 DextrAH-G의 상위 FGP 정책은 손가락 동작을 PCA(taskmap) 좌표계의 주요 축 방향으로만 목표치를 내도록 제한되어 있다. 이는 파지 행동 학습에 집중하기 위한 의도적 설계였으나, 그 대가로 손가락의 세밀한 조작 능력(kinematic dexterity) 일부를 포기한 셈이 된다. 다시 말해 손가락이 만들어낼 수 있는 다양한 모션 중 주성분적인 일부만 사용하므로, 잠재적인 복잡한 조작(skill)의 표현력이 떨어질 수 있다. 향후에는 손가락 운동 자유도를 더 활용하면서도 학습 효율을 유지할 방법이 과제로 남아 있다.
- 학습 기반 충돌 회피의 부재: DextrAH-G는 로봇-환경 간 충돌 회피를 주로 패브릭 제어기의 내장 기능에 의존하고 있다. 이상적으로는 정책 자체가 카메라 등 센서 정보를 통해 장애물을 인지하고 회피 행동을 학습하는 것이 바람직하지만, 현재 정책은 이러한 능력이 없다. 그 결과 시뮬레이션 학습 시에도 테이블 면과 가까운 영역 등 높은 비용(risk)의 상태를 적극적으로 탐색하지 못하고 피해가는 경향이 있었다. 실제로 패브릭 제어기가 테이블과의 큰 충돌은 예방해주지만, 너무 보수적으로 회피하다 보니 테이블에 납작하게 놓인 낮은 물체를 잡을 때 어려움을 겪는 현상이 나타났다. 이 부분은 강화학습의 탐색 전략 개선이나 커리큘럼 학습 등을 통해 정책이 어느 정도 충돌을 무릅쓴 탐색도 할 수 있게 유도하는 방향으로 보완이 필요하다.
- 탐색 알고리즘 및 RL 안정성: 앞의 문제와 관련하여, 현 정책의 RL 알고리즘이 고비용 영역을 탐색하는 데 한계를 보인다는 지적이 있다. 패브릭 제어기가 없었다면 아마 로봇이 테이블에 부딪히는 등의 시도를 통해 낮은 물체 잡는 법을 배울 수도 있었겠지만, 제어기의 보호막 때문에 애초에 해당 영역을 경험하지 못한 것이다. 이를 해결하려면 더 똑똑한 탐색 기법이나 알고리즘적 개선(예: 안전 탐험, 보상 도메인 개선 등), 또는 일부러 충돌에 가까이 가보도록 유도하는 커리큘럼을 도입하는 등 연구가 필요하다.
- 복잡한 환경에서의 활용 한계: 현재 DextrAH-G 시스템은 단일 물체 파지에 초점을 맞추고 있어, 한 장면(scene)에 여러 개의 물체가 섞여 있는 경우에는 대처하기 어렵다. 예를 들어 바닥에 흩어진 여러 물건 중 하나를 집으라고 하면, 어떤 물체를 목표로 할지 인식하는 능력이나 잡고자 하는 대상 이외의 다른 물건을 무시하는 처리가 필요하다. 논문에서도 “하나의 장면에 한 물체만 존재한다”는 가정 하에 정책을 개발했기 때문에, 이를 다수 객체 난잡한 환경(clutter)으로 확장하려면 시각적 세그멘테이션 모듈을 붙이거나 정책을 여러 단계로 구성하는 등의 추가 설계가 필요함을 언급하고 있다. 실제 응용을 위해서는 로봇이 장면 내 목표 물체를 스스로 식별하고 그 물체에만 초점을 맞춰 파지하는 기술과의 통합이 과제로 남는다.
이런 한계에도 불구하고, DextrAH-G는 현재까지 보고된 결과만 놓고 보면 덱스터러스 로봇 파지 분야의 상당한 진일보를 이뤄냈다. 고속·고성공률의 파지, 안전한 실환경 동작, 그리고 범용적인 물체 대응력 등을 모두 갖춘 사례로서, 향후 이 분야 연구와 실제 산업적용에 귀중한 참고가 될 것으로 기대된다. 동시다발적인 여러 연구의 발전 속에서 DextrAH-G가 보여준 교사-학생 학습 + 기하패브릭 제어의 조합은, 향후 고성능 로봇 스킬 학습을 위한 하나의 유망한 방향으로 평가할 만하다. 이번 연구를 바탕으로 남은 한계점들 – 예컨대 복잡한 작업 공간, 더욱 높은 속도 향상, 연성 물체나 촉각 활용 등 – 에 대한 후속 연구가 지속된다면, ‘무엇이든 정확히 빨리 집어내는’ 범용 로봇 손의 실현도 머지않아 보인다.