📃DexMachina 리뷰
- 🤖 이 연구는 인간의 손-객체 시연을 로봇의 양손으로 관절형 객체를 조작하는 기능적 리타겟팅(functional retargeting) 정책으로 학습시키는 어려운 문제를 다룹니다.
- 💡 핵심 아이디어는 가상 객체 컨트롤러(virtual object controllers)의 강도를 점진적으로 약화시키는 커리큘럼 기반 RL(강화 학습) 알고리즘인 DexMachina를 제안하여, 정책이 초기에는 객체를 자동으로 목표 상태로 이동시키면서 점차 조작을 인수하도록 훈련시키는 것입니다.
- ✅ 이 알고리즘은 기존의 기준 방법론을 훨씬 능가하는 성능을 보였으며, 다양한 덱스터러스 핸드(dexterous hands)와 작업을 포함하는 시뮬레이션 벤치마크를 공개하여 하드웨어 설계의 기능적 비교를 가능하게 합니다.
Brief Review
이 논문은 인체-객체 데모로부터 객체 상태를 추적하기 위한 능숙한 조작 정책을 학습하는 functional retargeting 문제를 다룬다. 특히, 높은 차원의 액션 공간, 시공간적 불연속성, 그리고 인간 손과 로봇 손 사이의 embodiment gap으로 인해 어려운 장기적이고 양손을 사용하는(bimanual) articulated object 작업에 중점을 둔다.
이러한 문제들을 해결하기 위해, 저자들은 가상 객체 컨트롤러(virtual object controllers, VOCs)를 기반으로 하는 새로운 커리큘럼 기반 RL 알고리즘인 DexMachina를 제안한다. DexMachina의 핵심 아이디어는 가상 객체 컨트롤러를 사용하여 객체를 목표 상태로 자동으로 움직이게 함으로써, 정책이 동작 및 접촉 지침 하에서 점진적으로 제어권을 인계받도록 학습하는 것이다. 초기에는 VOCs가 객체 움직임의 대부분을 담당하며, 정책은 작업을 망치지 않으면서 인간의 동작을 모방하는 것을 학습한다. 시간이 지남에 따라 VOCs의 강도가 약해지면서, 정책은 점차적으로 객체 조작을 스스로 수행하도록 학습한다.
핵심 방법론: DexMachina
DexMachina는 RL 환경에서 functional retargeting 작업을 수행하기 위해 정책을 학습시킨다.
- RL 환경 및 Task Reward: 각 타임스텝 t에서 객체의 실제 달성 상태 \hat{G}_t = \{\hat{g}_t^P, \hat{g}_t^R, \hat{g}_t^J\} (위치, 회전, 조인트 각도)와 데모의 목표 상태 G_t = \{g_t^P, g_t^R, g_t^J\}를 비교한다.
task rewardr_{\text{task}}는 각 상태 구성 요소의 정확도를 측정하는 세 항의 곱으로 정의되어 균형 잡힌 학습을 장려한다.- 위치 오차: d_{\text{pos}} = || \hat{g}_t^P - g_t^P ||_2
- 회전 오차: d_{\text{rot}} = 2 \cos^{-1}(|\langle \hat{g}_t^R, g_t^R \rangle|)
- 관절 오차: d_{\text{ang}} = || \hat{g}_t^J - g_t^J ||_2
Task reward: r_{\text{task}} = \exp(-\beta_{\text{pos}}d_{\text{pos}}) \exp(-\beta_{\text{rot}}d_{\text{rot}}) \exp(-\beta_{\text{ang}}d_{\text{ang}}) 여기서 \beta_{\text{pos}}, \beta_{\text{rot}}, \beta_{\text{ang}}는 각 구성 요소에 대한 가중치이다.
- 액션 정형화 및 Aux Reward (
Auxiliary Rewards):task reward만으로는 복잡한 장기 작업에서 정책이 효과적으로 학습하기 어렵다. 이를 보완하기 위해 두 가지 방법을 사용한다.- 하이브리드 액션 정형화 (
Hybrid Action Formulation): 인간 데모와 더 잘 일치하도록 손목(wrist) 액션 공간을 제한하고, 나머지 손가락(finger) 관절은 절대 액션을 사용한다.kinematics-only retargeting알고리즘 (Anyteleop[3] 기반)을 통해 얻은retargeted joint값 Q \in \mathbb{R}^{T \times J}를 손목 관절의 기본 액션으로 사용하며, 정책은 그 위에 잔차(residual) 액션을 출력한다. 손가락 관절은 관절 한계에 의해 정규화된 절대 액션을 사용한다. - Aux Reward (
Auxiliary Rewards): 정책이 인간의 손-객체 상호작용 전략을 따르도록 유도한다.- 데이터 전처리: 데모 데이터 D_\eta에서
collision-aware kinematic retargeted jointsQ와 참조 키포인트(reference keypoints) X \in \mathbb{R}^{T \times K \times 3}를 추출한다. 또한, 손 링크와 객체 부품 사이의 근사 접촉 위치 C \in \mathbb{R}^{(T \times N \times K \times 3)}와 유효성 마스크 M \in \mathbb{R}^{(T \times N \times K)}를 추출한다. - 동작 모방 Reward (
Motion Imitation Reward): 인간과 유사한 손 동작을 장려하기 위해 키포인트 매칭 기반의 r_{\text{imi}}와 관절 각도 거리 기반의 행동 복제(behavior-cloning) Reward r_{\text{bc}}를 정의한다. r_{\text{imi}} = \frac{1}{K} \sum_{i=1}^K \exp(-\beta_{\text{imi}}||\hat{x}_i - x_i||_2) r_{\text{bc}} = \frac{1}{J} \sum_{i=1}^J \exp(-\beta_{\text{bc}}||\hat{q}_i - q_i||_2) - 접촉 Reward (
Contact Reward): 정책의 접촉을 데모의 접촉과 일치시켜 계산한다. 접촉 거리 D \in \mathbb{R}^{N \times K}는 유효성 마스크에 의해 가려진L2거리를 사용하여 계산된다. r_{\text{con}} = \frac{1}{2NK} (\sum_{i=1}^N \sum_{j=1}^K \exp(-\beta_{\text{con}}D(i,j)_{\text{left}}) + \sum_{i=1}^N \sum_{j=1}^K \exp(-\beta_{\text{con}}D(i,j)_{\text{right}})) 최종RLReward r_t는 이 모든 항의 가중 합이다: r_t = \lambda_{\text{task}}r_{\text{task}} + \lambda_{\text{imi}}r_{\text{imi}} + \lambda_{\text{bc}}r_{\text{bc}} + \lambda_{\text{con}}r_{\text{con}}
- 데이터 전처리: 데모 데이터 D_\eta에서
- 하이브리드 액션 정형화 (
- 가상 객체 컨트롤러를 이용한 자동 커리큘럼 (
Auto-Curriculum with Virtual Object Controllers): 정책이 복잡한 작업에서 초기 실패에 빠지는 것을 방지하기 위해VOCs를 도입한다.VOCs는 데모 상태 G를 제어 목표로 삼아 가상 스프링-댐퍼 제약(spring-damper constraints)을 적용하여 객체를 목표 궤적을 따라 움직이게 한다.- 구현: 시뮬레이션에서
privileged information을 사용하여 구현된다. 각 객체는 기본 포즈에 대해 6-DoF, 관절 동작에 대해 1-DoF를 가진 가상 관절을 갖추고 있으며, 모든 관절은PD컨트롤러에 의해 구동된다. - 커리큘럼 스케줄링: 학습 시작 시에는 높은
VOC이득(gains) (k_p, k_v)을 설정하고, 정책의 학습 진행에 따라 이 이득을 점진적으로 지수적으로 감소시킨다. 정책이 모든 Reward(task,imi,bc,con)에 대해 일정 임계값(threshold)을 초과하면 이득이 감소한다. 이를 통해 정책은 초기에 높은task reward를 달성하면서 Aux Reward을 개선하는 방법을 학습하고,VOCs가 약해지면 높은task reward를 유지하기 위해 자체 동작을 조정하는 법을 배운다.
- 구현: 시뮬레이션에서
실험 및 결과
저자들은 6개의 능숙한 로봇 손(Inspire, Allegro, Xhand, Schunk, Ability, DexRobot Hand)과 5개의 articulated object로 구성된 시뮬레이션 벤치마크를 구축했다. Genesis 물리 시뮬레이터와 PPO 알고리즘을 사용하여 DexMachina를 평가했다.
- 주요 결과:
DexMachina는 모든 손과 작업에서 일관되게 성능을 향상시켰으며, 특히 복잡한 장기 작업에서 기준선(baseline) 방법들(Kinematics Only,ObjDex,Task + Auxiliary Rewards without curriculum,ManipTrans)을 크게 능가했다.kinematic retargeting만으로는 작업을 완료할 수 없었다. - 하드웨어 적응성:
DexMachina는 정책이 하드웨어 제약에 맞춰 작업 전략을 학습하도록 한다. 예를 들어,Notebook-300작업에서XHand는 인간 데모를 따랐지만, 더 작고 구동이 적은Inspire Hand는 객체를 안정화하고 커버를 닫기 위해 양손을 사용하는 다른 전략을 학습했다. 이는 Aux Reward이 엄격한 지침이 아닌 유연한 안내 역할을 하여 정책이 더 나은task reward를 위해 참조 동작에서 벗어날 수 있음을 보여준다. - Ablation Study:
- 액션 Ablation: 제안된 하이브리드 액션 정형화(손목 움직임에 더 제한적인 경계를 사용)가 절대 액션이나 덜 제약적인 잔차 액션보다 전반적으로 더 나은 학습 성능을 보였다.
- 커리큘럼 Ablation:
ManipTrans의 커리큘럼(오차 임계값, 중력, 마찰 매개변수 감소)은DexMachina의VOC기반 커리큘럼만큼 효과적이지 않았다. 물리 매개변수만 감소시키는 것으로는 장기적articulated object작업에 충분하지 않음을 시사한다.
- 손 구현체 분석 (
Hand Embodiment Analysis):DexMachina와 벤치마크를 사용하여 다른 능숙한 손 디자인을 기능적으로 비교했다. 더 크고 완전히 구동되는 손(Allegro Hand등)이 더 높은 최종 성능과 더 나은 학습 효율을 보였다. 크기보다는 자유도(degrees of freedom,DoF)가 더 중요하며,Schunk Hand는Inspire,Ability와 비슷한 크기임에도 더 많은DoF와 유연한 디자인 덕분에 더 나은 성능을 달성했다.
결론 및 한계
이 작업은 functional retargeting을 위한 DexMachina 알고리즘과 포괄적인 시뮬레이션 벤치마크를 제공한다. DexMachina는 기존 방법들을 뛰어넘는 성능을 보이며, 다양한 능숙한 손 디자인에 대한 기능적 비교를 가능하게 한다. 한계점으로는, 정책이 시뮬레이터의 privileged information에 의존하는 상태 기반 입력을 사용한다는 점(실제 세계에서의 취득 어려움), 고품질 인간 손-객체 데모 데이터의 필요성(수집 비용과 큐레이션), 시뮬레이션된 손 모델의 물리적 속성 추정으로 인한 실제 하드웨어와의 동역학 불일치 가능성, 그리고 실제 세계에서의 평가 부족 등이 있다.
Detail Review
DexMachina: 기능적 리타게팅을 통한 양손 섬세 조작
Introduction
인간의 손재주는 로봇 공학에서 오랫동안 궁극적인 목표였지만, 인간 손과 로봇 손의 차이(embodiment gap)로 인해 동일한 동작을 이식(retarget)하는 데 많은 어려움이 존재합니다. 2025년 5월 Arxiv에 공개된 “DexMachina: Functional Retargeting for Bimanual Dexterous Manipulation” 논문은 이러한 문제를 해결하기 위해 제안된 새로운 강화학습 기반 방법입니다. 이 글에서는 해당 논문의 핵심 아이디어와 방법론, 실험 결과, 그리고 기존 관련 연구들과의 비교를 전문가의 시각에서 깊이 있게 분석합니다. 특히 ① 방법론의 독창성 (기존 리타게팅/모션 트랜스퍼 기법 대비 차별점), ② 실험 결과 분석 (다양한 환경에서의 성능과 효과), ③ 기존 연구와의 비교 (유사 목적을 가진 프레임워크들과의 기술적 차이와 기여도)에 중점을 두어 살펴보겠습니다.
기능적 리타게팅의 개념: DexMachina는 기능적 리타게팅(functional retargeting)이라는 개념을 정립합니다. 이는 인간 시연의 “결과”에 초점을 맞춰 로봇이 물체를 동일하게 조작하도록 학습하는 것으로, 단순히 인간의 손동작을 흉내내는 운동학적 리타게팅과 대비됩니다. 기존의 운동학적 리타게팅은 로봇 손가락 위치를 사람 손과 유사하게 따라하게 할 수는 있어도 물체 조작 성공을 보장하지 못하는 반면, DexMachina는 물체의 목표 상태를 따라가도록 정책을 학습시키는 점에서 근본적으로 다릅니다.
가상 객체 제어와 커리큘럼 학습: DexMachina의 가장 독창적인 아이디어는 “가상 객체 제어기(virtual object controller)”를 활용한 자동 커리큘럼 학습입니다. 초기 학습 단계에서는 외부 힘(가상 제어기)이 물체를 자동으로 목표 위치까지 밀어주면서 정책 학습을 돕고, 점진적으로 그 도움을 줄여나감으로써 최종적으로 로봇 정책이 스스로 물체를 조작하도록 만듭니다. 이러한 점감적 Aux 방식은 초반 학습의 난이도를 크게 낮춰주어, 긴 시퀀스 작업에서도 초기 실패를 방지하고 안정적으로 탐색할 수 있게 합니다.
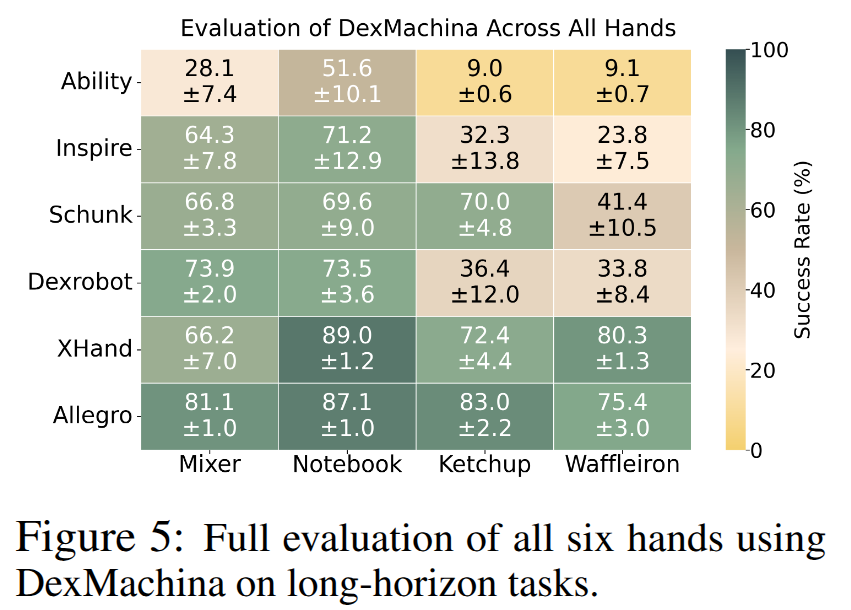
다양한 손과 작업에 대한 범용성: 저자들은 6종의 로봇 손(Inspire Hand, Allegro Hand, X-Hand, Schunk Hand 등)과 5종의 복잡한 물체(노트북, 주방기구 등 관절부를 가진 물체들)로 구성된 시뮬레이션 벤치마크를 구축하여 DexMachina의 성능을 평가했습니다. 결과적으로 DexMachina는 모든 손과 작업에 걸쳐 기존 방법들을 능가하는 성공률을 보였으며, 특히 복잡한 양손 장기 작업(long-horizon)에서 두각을 나타냈습니다. 또한 하나의 알고리즘으로 다양한 로봇 손에 별도 튜닝 없이 적용 가능함을 보여주어, 향후 로봇 손 하드웨어 설계 비교에도 유용한 표준을 제시합니다.
이제 위 세 가지 주제에 대해 순서대로 자세히 살펴보겠습니다.
1. 방법론의 독창성: DexMachina만의 리타게팅 접근법
인간 시연의 “기능”을 학습 목표로 삼다. DexMachina는 인간 손-물체 상호작용 시연(예: 사람이 두 손으로 와플 기계를 들어 열었다 닫는 시연)을 입력으로 받아, 로봇의 두 손이 물체의 동일한 기능적 결과를 재현하도록 정책을 학습시킵니다. 여기서 기능적 결과란 물체의 상태 변화에 초점을 둔 것으로, 사람 시연과 똑같은 동작 경로를 그리지 않더라도 물체의 움직임이 같다면 성공으로 간주합니다. 이는 사람 움직임 자체를 따라하려는 기존의 접근과 근본적으로 다릅니다. 예를 들어 사람이 공을 던지는 시연이 주어졌을 때, DexMachina는 로봇이 공을 같은 목표에 맞히는 것에 집중하지, 인간의 모든 손가락 각도를 그대로 재현하려 하지는 않습니다. 이러한 발상의 전환 덕분에, 로봇과 인간 손 구조가 달라도 Task 중심으로 학습이 이루어질 수 있습니다.
시연 데이터로 자동 Reward 설계: DexMachina는 한 편의 인간 데모(모션 캡쳐된 손/물체 궤적)만으로도 추가 Reward 설계 없이 학습 목표를 정의합니다. 구체적으로, 데모의 물체 상태 궤적을 추출하여 로봇이 따라가야 할 Task Reward(task reward)을 정하고, 인간 손동작을 로봇 손으로 충돌 없게 변환한 기준 모션을 계산하여 모션 모방 Reward으로 활용합니다. 또한 데모에서 손-물체 접촉 지점을 근사추정하여, 로봇 손도 비슷한 지점에 접촉하도록 접촉 Reward을 부여합니다. 흥미로운 점은, 로봇 손목(wrist) 움직임은 데모 궤적을 최대한 따르도록 제한하고 손가락 관절은 절대 제어하게 하는 하이브리드 방식을 취한다는 것입니다. 이렇게 하면 큰 팔 동작은 인간과 비슷하게 유지하면서도, 세밀한 손가락 움직임은 로봇이 자유롭게 조정하여 자기 구조에 맞게 최적화할 수 있습니다. 요약하면, DexMachina는 데모 → (Task + 모션 + 접촉) Reward으로 변환하는 객체 중심 학습 목표를 자동 구축하여, 별도의 Reward 함수 설계 없이도 효과적인 강화학습 환경을 마련합니다.
“Deus ex machina” – 가상 스프링으로 시작하는 커리큘럼 RL: DexMachina라는 이름에는 “기계에서 내려온 신”이라는 뜻이 담겨 있는데, 이는 알고리즘이 초반에 마치 보이지 않는 손처럼 물체를 움직여주는 모습에 착안한 것입니다. 정책 학습이 특히 어려운 장기간 양손 조작의 경우, 두 손의 미세한 협응 실패로 초반에 곧잘 임무가 좌초되기 쉽습니다. 이를 해결하기 위해 DexMachina는 자동 커리큘럼(auto-curriculum) 전략을 도입했습니다. 초기 학습 단계에서는 가상 객체 제어기(Virtual Object Controller)가 일종의 스프링 힘으로 물체를 사람이 보여준 방향대로 움직여 줍니다. 정책은 이 때 실패 위험 없이 따라하는 법을 배우고, 점차 정책이 성과를 내기 시작하면 가상 힘의 세기를 줄여 정책이 자율적으로 물체를 조작하도록 만듭니다. 이러한 점진적 난이도 상승은 강화학습에서 흔히 쓰이는 커리큘럼 학습 개념을 응용한 것으로, 물체 물리 동역학을 제어하는 외력으로 난이도를 조절하는 점이 특징입니다.
DexMachina 알고리즘의 개요도. 왼쪽은 인간 양손 데모에서 얻은 물체 상태 변화(예: 와플 기계 뚜껑의 각도)와 로봇 모션/접촉 Reward 신호 추출 과정을 보여준다. 오른쪽은 자동 커리큘럼 학습 과정으로, 초기에는 강한 가상 스프링(가상 객체 제어기)이 물체를 목표대로 움직여주어 로봇 정책이 실패 없이 모방학습을 하고, 중기에는 약한 스프링으로 Aux를 줄이면서, 최종적으로 스프링 없이 정책 혼자서 물체를 조작하도록 훈련된다. 이러한 방식으로 DexMachina는 운동학적 리타게팅의 초기 가이드와 강화학습의 자율 탐색을 자연스럽게 연결한다.
기존 기법 대비 차별성: DexMachina의 방법론은 기존 리타게팅 및 모션 트랜스퍼 기술과 몇 가지 중요한 차이를 보입니다. 첫째, 사람 손동작을 로봇에 단순 이식하던 접근과 달리, DexMachina는 사람-로봇 간 공통의 Task 공간(object state trajectory)에서 문제를 정의하여 물리적으로 실행 가능한 전략을 학습합니다. 예컨대 Park 등(2025)은 인간-로봇-물체 움직임의 공동 임베딩 공간을 학습하여 거기서 로봇 동작을 추론하는 방식으로 데이터 기반 리타게팅을 수행하였는데, DexMachina는 이를 강화학습 정책으로 구현함으로써 새로운 손/환경에도 온라인 적응 능력을 부여합니다. 둘째, 기존 많은 텔레오퍼레이션 기반 시연 방법들은 로봇 손마다 별도 시스템 구축이 필요하고 주로 단발적 그립 동작에 그쳤지만, DexMachina는 단 하나의 시연만으로 장시간의 복잡한 조작을 가능케 했습니다. 또한 DeepMimic이나 DAPG(Rajeswaran et al., 2018)처럼 예제 모션을 RL로 따라하는 선행 연구들이 있었지만, 대부분 단일 로봇 손에 단일 작업을 다루고 Reward 신호도 제한적이었습니다. 반면 DexMachina는 Reward 구성의 다양화(Task+모션+접촉)와 외력 커리큘럼이라는 새로운 요소로 이러한 모션 트랜스퍼 문제를 확장했고, 이를 통해 두 손이 협응해야 하는 복잡한 작업도 자동학습이 가능함을 보였습니다. 종합하면 DexMachina는 “시연 데이터 + 강화학습 + 커리큘럼”의 세 박자를 맞추어, 기존 방법들이 부분적으로만 해결했던 문제들을 하나의 프레임워크에 통합한 점에서 독창적입니다.
2. 실험 결과 분석: 성능, 적응성, 일반화 능력
벤치마크 구성 및 평가 지표: 저자들은 사람이 양손으로 수행한 긴 조작 시연 7개를 선택하여, 이를 모사해야 하는 시뮬레이션 환경을 만들었습니다. 해당 시연 데이터는 ARCTIC이라는 공개 데이터셋의 일부로, 예를 들어 박스를 집어들어 뚜껑 열기, 노트북 들어 덮기, 믹서기 뚜껑 닫기, 와플 기계 들어 열기 등 5가지 물체에 대한 단기/장기 과제들을 포함합니다. 로봇 손으로는 오픈소스 6종의 로봇 핸드(Inspire, Allegro, X-Hand, Schunk, Ability, DexRobot 등 크기와 구조가 다양한 모델)를 활용했습니다. 성능 평가는 물체 추적 오차 기반 지표를 사용했는데, 데모의 물체 궤적 대비 로봇이 조작한 물체의 위치/자세가 얼마나 일치하는지를 AUC-ADD(평균 거리 오차에 대한 곡선 아래 면적) 형태의 점수로 환산하고, 이를 성공률(%)로 표현했습니다. 직관적으로 100%면 물체를 정확히 따라간 것이고, 0%면 전혀 따라가지 못한 것입니다.
주요 비교 방법: 실험에서는 DexMachina를 다음과 같은 방법들과 비교했습니다:
- Kinematic Only: 인간 운동학적 리타게팅 결과를 그대로 재생. (정책 학습 없음)
- Task Rew Only: ObjDex라 명명된 기준으로, Task Reward만으로 RL 정책 학습 (인간 데모의 물체 궤적만 목표, 모션/접촉 Reward 없음).
- Task + Aux Reward: DexMachina에서 제안한 Task + 모션 + 접촉 Reward은 쓰되, 커리큘럼 없이 학습 (즉, 가상 객체 제어 미사용).
- ManipTrans (2025): Li 등(2025)이 제안한 최신 방법으로, 사전 모방학습 + 잔여(residual) 정책 RL 2단계로 인간 양손 시연을 이식하는 기법. (저자들이 공개한 코드/데이터를 이용한 결과)
여러 방법의 성공률 비교 (높을수록 우수). 가로축은 작업 종류(예: Ketchup-100은 짧은 케첩 통 흔들기 과제, Waffleiron-300은 긴 와플기계 조작 과제)이며, 세로축은 해당 과제 완료 성공률(%)입니다. 노랑은 학습 없이 운동학적 리타게팅만으로 실행한 경우, 갈색(ObjDex)은 Task Reward만으로 RL한 경우, 회색은 Task+Aux Reward으로 RL했으나 커리큘럼 없는 경우, 녹색(DexMachina)은 제안 기법 (Aux Reward+커리큘럼)이며, 진갈색(ManipTrans)은 최신 2단계 잔여학습 방식입니다. DexMachina(녹색)가 대부분의 과제에서 최고 성능을 보이며, 특히 난이도가 높은 -300 장기 과제들에서 두드러지게 앞서는 것을 알 수 있습니다. 또한 ManipTrans 대비해서도 DexMachina가 많은 경우 높은 성공률을 보이는데, 이는 제안 기법의 탁월한 장기 탐색 능력을 방증합니다. 실제로 ManipTrans 연구에서도 자사 방법이 성공률과 모션 재현 정확도에서 기존 기법들을 능가한다고 보고하였지만, DexMachina의 커리큘럼 전략이 동일 과제에서 한층 높은 성과를 낸 것을 확인할 수 있습니다.
종합 성능: 결과 그래프를 보면 DexMachina(녹색 막대)가 모든 실험 환경에서 가장 높은 성공률을 기록함을 알 수 있습니다.
- 단순 리타게팅 재생(Kinematic Only)의 경우 사람과 로봇 손 구조 차이로 인해 물체를 제대로 다루지 못해 성공률이 거의 0에 수렴하며, Reward만 준 RL(ObjDex)도 초반 탐색 실패로 장기 작업을 끝내지 못하는 경우가 많았습니다.
- 반면 DexMachina는 커리큘럼이 있는 경우 없는 경우 대비 크게 향상되어, 모든 손과 모든 작업에서 일관되게 최고의 성능을 달성했습니다. 특히 각 작업 이름에
-300이 붙은 장기 시나리오(예: Notebook-300, Waffleiron-300 등)에서 그 격차가 두드러졌습니다.
정량적 수치 및 분석:
- DexMachina는 전반적인 평균 약 85% 수준의 높은 성공률을 기록하였는데, 이는 기존 방법들에 비해 크게 향상된 수치입니다.
- 특히 단기 과제의 경우 모든 로봇 손이 70~90%에 달하는 준수한 성과를 거두었고, 장기 과제에서도 가장 어려운 시나리오(Waffleiron-300 등)조차 성공률 40~80% 범위를 달성하여 난제 해결의 가능성을 보여주었습니다.
- 반면 Aux Reward이나 커리큘럼이 없었던 RL 정책은 장기 과제에서 0~30% 수준에 머무는 등 불안정한 모습을 보였으며, 이는 초기 탐색 실패와 접촉 타이밍 학습 미비 등에 기인합니다.
- DexMachina는 가상 제어기의 초기 개입 덕분에 이러한 실패 구간을 건너뛰고 효과적으로 학습을 진행, 에피소드 말미까지 임무를 완수하는 비율을 크게 끌어올린 것입니다.
질적 결과: 적응적 전략의 학습
- 흥미로운 것은, DexMachina로 학습된 정책이 주어진 인간 시연을 맹목적으로 복제하지 않고, 로봇 자신의 신체에 맞게 전략을 재구성했다는 점입니다.
- 예를 들어 노트북 덮기 작업에서, XHand 로봇 손은 인간 시연과 동일하게 왼손으로 노트북을 들고 오른손으로 덮개를 닫는 전략을 따라한 반면, 더 작고 자유도가 낮은 Inspire Hand는 양손 모두로 노트북을 지탱하면서 덮개를 닫는 방식으로 임무를 완수했습니다.
- 동일한 인간 시연을 참고했음에도 각 로봇의 크기와 관절 한계에 최적화된 동작을 스스로 찾아낸 것입니다. 비슷하게 믹서기 뚜껑 닫기 작업에서는, Allegro Hand가 사람처럼 긴 엄지손가락을 활용해 뚜껑을 눌러 닫은 반면, 구조가 다른 Schunk Hand는 손바닥과 손목을 이용해 뚜껑을 밀어 닫는 등 상이한 접근을 보였습니다.
- 이러한 사례들은 DexMachina의 정책이 하드웨어 제약에 적응하여 기능적 목표를 달성하는 법을 학습했음을 보여줍니다. 사람이 시연한 방식을 그대로 흉내내는 것이 아니라, 시연의 의도를 이해해 로봇 자신의 방식으로 임무를 달성했다는 점에서 의미가 있습니다.
로봇 손 설계 간 비교:
- 저자들은 나아가 제안한 벤치마크를 활용한 로봇 손 설계 비교 실험도 수행했습니다.
- 모든 핸드는 동일한 인간 손 모션 참조를 사용하지만, 정책이 사람의 지침에서 벗어나는 정도는 핸드 크기와 운동학적 제약에 따라 달라집니다.
- 동일한 네 가지 장기 과제에 대해 서로 다른 로봇 손들이 DexMachina로 학습했을 때의 성능을 비교한 결과, 더 큰 크기이면서 모든 손가락이 능동 구동되는 손일수록 학습 효율과 최종 성공률이 높게 나타났습니다.
- 예를 들어 Schunk Hand나 X-Hand는 작은 Inspire Hand나 Ability Hand보다 성공률과 학습속도 모두 우수했는데, 이는 단순한 크기 차이뿐 아니라 자유도의 차이에서 기인한 것으로 분석됩니다.
- 크기보다 자유도(degrees of freedom, DOF)가 더 중요한 성능 결정 요인임을 발견했습니다.
- 큰 사이즈와 완전히 작동하는 핸드(fully-actuated hands)는 학습 효율성과 최종 성능 면에서 뛰어나며, 긴 손가락을 가진 Allegro Hand가 특히 우수한 안정성을 제공합니다.
- 크기가 비슷한 Inspire, Ability, Schunk 핸드 중에서는 Schunk 핸드가 손가락 끝 부분이 작동하고 접히는 손바닥을 가지고 있어 평균적으로 더 나은 성능을 냈습니다.
- 적게 작동하는 핸드들은 인간 손과 더 닮아 보이지만 학습된 전략은 더 크고 기능적인 핸드보다 덜 인간적입니다.
- 결과적으로 Inspire와 Ability 핸드는 주어진 과제를 수행하기 위해 다른 전략을 자주 선택해야 합니다.
- 구동 가능한 관절 수(DoF)가 많은 손은 물체를 다루는 대체 동작을 찾기 쉽기 때문에 학습에 유리하며, 반대로 인간 손 크기에 가깝더라도 제약이 많은 손은 학습 난이도가 높았습니다.
- 이러한 정량적 비교는 DexMachina가 제시한 하나의 중요한 활용 예로, 동일한 알고리즘 아래 여러 로봇 손의 기능적 성능을 객관적으로 평가할 수 있음을 보여줍니다. 이는 향후 새로운 로봇 핸드 설계시 어떤 구조가 실제 작업에 유리한지 가늠하는 데에도 큰 도움을 줄 것으로 기대됩니다.
3. 기존 연구와의 비교: DexMachina의 기여도와 차별화
마지막으로, DexMachina를 유사한 목표를 가진 기존 프레임워크/논문들과 비교하여 그 기술적 위치를 살펴보겠습니다. 크게 (a) 기존 리타게팅 기법, (b) 시연 기반 학습(RL/IL) 기법, (c) 최근 발표된 유사 연구 세 범주로 나누어 논의합니다.
(a) 전통적 리타게팅 vs. DexMachina: 과거의 손 동작 리타게팅 기술은 주로 인간 손가락 궤적을 로봇 손으로 대응시켜보는 수준이었습니다. 예를 들어 VR 장갑이나 모캡으로 인간 손 움직임을 읽어 로봇 손가락 관절로 매핑하는데, 이는 로봇과 인간의 형태 차이 때문에 충돌을 일으키거나 물체를 제대로 쥐지 못하는 경우가 많았습니다. Park 등(2025)은 이러한 기존 end-effector 정렬 기반 리타게팅이 비현실적인 동작을 만들기 쉽다고 지적하며, 인간-로봇-물체 사이의 공동 모션 manifold를 학습하여 보다 플라우저블(plausible)한 로봇 동작을 얻는 방법을 제시하였습니다. 해당 방법은 대량의 인간 시연 데이터로 인간-물체-로봇 사이의 관계 모델을 훈련한 후, 주어진 새로운 시연에 대해 로봇 행동을 직접 추론하는 접근으로, 실제 로봇에 실험하여 기존 단순 매핑보다 성공률 향상을 시연했습니다. DexMachina 역시 인간 시연→로봇 동작이라는 큰 흐름은 같지만, 접근법은 사뭇 다릅니다. DexMachina는 명시적으로 물리 시뮬레이션 환경에서 RL로 정책을 학습하므로, 중간에 인간 모델을 로봇으로 변환하는 모션 생성기가 필요한 대신, 강화학습 자체가 모션을 만들어내는 역할을 합니다. 이로써 한편으로는 시연이 부족한 상황에서도 (정책이 탐색을 통해) 답을 찾아갈 수 있고, 다른 한편으로는 학습된 정책이 온라인으로 물체 반응에 대응할 수 있어 강인성을 얻습니다. 다만 DexMachina는 현재 시뮬레이션 학습에 집중하고 있어 즉시 실세계 로봇에 적용되지는 않았는데, Park 등의 접근은 애초에 실물 로봇 대상 데이터로 학습/검증되었다는 차이가 있습니다. 요약하면, 기존 리타게팅 기법들이 “모델을 학습시켜 한 번에 매핑”하는 경향이라면, DexMachina는 “시뮬레이터 안에서 직접 배우게” 하는 방식으로 문제를 푼다고 볼 수 있습니다. 이 과정에서 커리큘럼을 통한 탐색 Aux라는 혁신을 추가하여, 인간처럼 양손 협응이 필요한 복잡한 작업도 실패 없이 학습하게 만들었다는 점이 두드러집니다.
(b) 시연 기반 강화학습(IL/RL) vs. DexMachina: 인간 시연을 활용하는 기법들은 모방학습(IL)과 Reward 강화학습(RL)로 크게 나뉩니다. 모방학습의 경우 시연 데이터만으로 정책을 모방하게 하는데, 로봇 손의 경우 정확한 로봇행동-결과 페어 데이터 수집이 어려워 제한적이었습니다. 이를 극복하고자 텔레오퍼레이션 장비(VR 장갑 등)를 이용해 사람이 로봇 손을 직접 원격조작하며 데이터를 모은 연구들이 다수 있었으나, 특정 로봇에 시스템을 특화해야 하고 주로 단순 집기(grasp) 등 짧은 작업에 머무는 한계가 있었습니다. 반면 DexMachina는 단 한 번의 인간 시연만으로도 긴 작업을 배울 수 있도록 했고, 인간-로봇 사이의 자세한 매핑 데이터 없이도 학습이 가능하다는 점에서 데이터 효율성을 보여주었습니다. 한편 강화학습+시연 혼합 기법으로 2018년 DAPG 등이 인간 시演을 초기 정책으로 활용하고 추가 RL 훈련을 통해 성과를 낸 바 있습니다. 그러나 DAPG는 문 손잡이 돌리기 등 단일 손의 비교적 짧은 작업을 대상으로 했고, Reward도 시연 모션 모방과 작업 완료 신호를 수동 설정하는 식이었습니다. DexMachina는 이러한 선행들의 교훈 – 시연이 주는 탐색 가이드 효과 – 을 받아들이면서도, Reward 신호를 자동으로 구성하고 외력 지원으로 탐색 효율을 높이는 등 여러 개선을 통해 문제 난이도를 한 단계 끌어올린 사례라 할 수 있습니다. 특히 장기간의 연속적인 물체 조작이라는 새로운 영역에서 시연+RL의 위력을 입증한 점은 학술적으로 의미가 큽니다.
(c) 최신 유사 연구들과의 비교: DexMachina와 같은 시기에 발표된 몇몇 연구들도 양손 조작 학습에 도전하고 있어 흥미로운 비교가 됩니다. ManipTrans (Li et al., CVPR 2025)는 DexMachina와 동일하게 인간의 양손 기술을 로봇에 전이하는 목표를 갖되, “두 단계”로 접근한 것이 특징입니다. 먼저 인간 시연을 흉내내는 트래젝토리 모방 모델을 학습한 뒤, 이를 기반으로 잔여 정책(residual policy)을 강화학습으로 파인튜닝하는 구조입니다. 이러한 사전학습+미세조정 방식은 데이터 효율을 높이고 학습을 가속하는 효과가 있어, 저자들은 다양한 시연 데이터로 거대한 DexManipNet이라는 로봇 조작 데이터셋까지 구축하였습니다. 결과적으로 ManipTrans 역시 높은 성공률과 정확도를 보였지만, 정책 최종 성능 측면에서는 DexMachina가 앞서는 것으로 DexMachina 논문 실험에서 확인되었습니다 (위 결과 그래프에서 갈색 막대 비교). 이는 잔여 학습단계의 제한적 탐색보다 DexMachina의 초기부터 끝까지 RL로 최적화하는 접근이 장기적으로 더 나은 솔루션을 찾았기 때문으로 추정됩니다. 다만 ManipTrans는 시연 모방 모델 덕분에 3천 개 이상의 다양한 작업 에피소드를 생성하여 데이터 다양성을 확보한 반면, DexMachina는 각 작업별 한 개의 시연에 집중합니다. 따라서 일대일 전이 학습 효율은 DexMachina가 높지만, 대량의 시연을 일반화하는 측면은 ManipTrans 쪽이 방향성이 다르다고 볼 수 있습니다. 또 하나 주목할 것은 실제로봇 적용인데, ManipTrans 쪽은 시뮬레이션에서 학습한 정책을 실제 로봇으로 이식하는 실험을 시도하고 있습니다. DexMachina는 현재 결과가 모두 시뮬레이터 상이지만, 정밀한 상태 입력에 의존하고 있어 시각센서 기반 정책으로의 확장은 과제로 남아 있습니다. 저자들도 향후 비전 기반 RL 정책이나 고급 센서 데이터 통합을 통해 실세계 적용을 모색할 수 있다고 언급하였습니다.
마지막으로, Videodex (Shaw et al., 2022)나 XSkill (Xu et al., 2023)처럼 사전 녹화 동영상이나 다른 로봇의 경험으로부터 간접적으로 기술을 학습하는 시도들도 있습니다. Videodex는 웹 비디오로부터 인간의 조작 시퀀스를 추출해 로봇에 학습시켰고, XSkill은 교차 형태 간(skill transfer across embodiments) 유용한 스킬을 발견하는 방법을 제안했습니다. 이러한 연구들은 시연 데이터의 형태가 다르지만, 로봇이 인간 수준의 다양한 조작을 배우는 방법을 탐구한다는 점에서 DexMachina와 맥을 같이 합니다. DexMachina의 가치는 특히 고품질의 한정된 시연을 최대한 활용하여 복잡한 임무를 달성하는 쪽에 있는데, 이는 향후 비디오나 저해상도 데이터에도 응용될 수 있는 통찰을 줍니다. 또한 AnyTeleop (Qin et al., 2023) 같은 원격 조작 시스템들은 사람의 즉각적인 조작을 로봇으로 투영하여 복잡한 임무를 수행했는데, DexMachina는 한 걸음 더 나아가 이러한 인간 개입 없이도 자율 정책으로 임무를 지속 수행하게 만들었다는 점에서 완전자율성에 한층 가까워졌습니다.
Conclusion
DexMachina는 인간 시연으로부터 양손 로봇 조작 기술을 배우는 새로운 방법론을 제시함으로써, 현재 활발한 섬세 조작(dexterous manipulation) 연구 분야에 큰 진전을 가져왔습니다. 방법론적으로 보면, Reward 설계의 자동화와 커리큘럼을 통한 탐색 지원을 결합하여 강화학습의 취약점을 효과적으로 보완한 점이 돋보입니다. 실험적으로는 다양한 로봇 손에 걸쳐 일관된 성능 우위를 증명함으로써, 제안 기법의 범용성과 실용적 가치를 입증했습니다. 특히 하나의 프레임워크로 하드웨어 성능을 비교 평가할 수 있다는 관점은, 향후 로봇 손 개발자들이 디자인 선택을 최적화하는 데에도 기여할 수 있을 것입니다.
물론 해결해야 할 과제도 남아 있습니다. 앞서 언급했듯이 DexMachina는 시뮬레이션 상태정보에 크게 의존하고 있어, 이를 실세계 센서 입력(시각/촉각)으로 옮기는 작업이 필요합니다. 또한 현실에서는 예기치 못한 교란이나 물체 모델의 불확실성 등이 존재하므로, 정책이 오류 복구나 적응적 재계획을 할 수 있도록 강화하는 연구도 중요할 것입니다. 데이터 수집 측면에서는, 현재는 사람 시연을 별도로 캡쳐해야 하지만, 미래에는 3D 비전이나 모션 캡쳐 자동화 기술의 발전으로 보다 손쉽게 시연 데이터를 확보할 수 있을 것입니다. 이러한 보완이 이루어진다면 DexMachina의 접근법은 산업 현장이나 서비스 로봇에서 사람처럼 도구를 다루고 협업하는 로봇을 훈련하는 데 큰 역할을 할 것으로 기대됩니다.
결론적으로, DexMachina는 기능적 리타게팅이라는 개념을 통해 로봇에게 “동작의 형태”보다 “동작의 목적”을 가르치는 법을 보여주었습니다. 이는 향후 인간 수준의 다재다능한 로봇 조작을 실현하는 데 중요한 방향을 제시하며, 현재 진행 중인 많은 후속 연구들의 기반이 되고 있습니다. 인간이 시연하고 로봇이 배워서 자기만의 방식으로 임무를 수행하는 모습은, 궁극적으로 휴먼-로봇 협업과 자율 기술 학습의 접점에서 매우 유망한 패러다임이라 할 수 있습니다.