📃DexFlow 리뷰
IEEE/RSJ IROS 2025
- 🤸 인간 손 모션을 로봇 손에 리타겟팅하여 사실적인 조작 데이터를 생성하는 문제 해결을 위해, 이 논문은 정확도와 상호작용을 개선하는 DexFlow 파이프라인을 제안합니다.
- 🛠️ DexFlow는 전역 최적화로 초기 자세를 맞춘 후, 이중 임계값 및 시간 스무딩 기반의 접촉 감지, 그리고 순차적 손가락 최적화를 통해 손-객체 상호작용을 세밀하게 조정합니다.
- 📊 이 방법은 기존 리타겟팅 방식보다 자세 정확도와 자연스러움을 크게 향상시키며, 새로운 데이터셋과 함께 물리적 타당성과 다양성을 갖춘 로봇 조작 데이터 생성에 기여합니다.
1 Brief Review
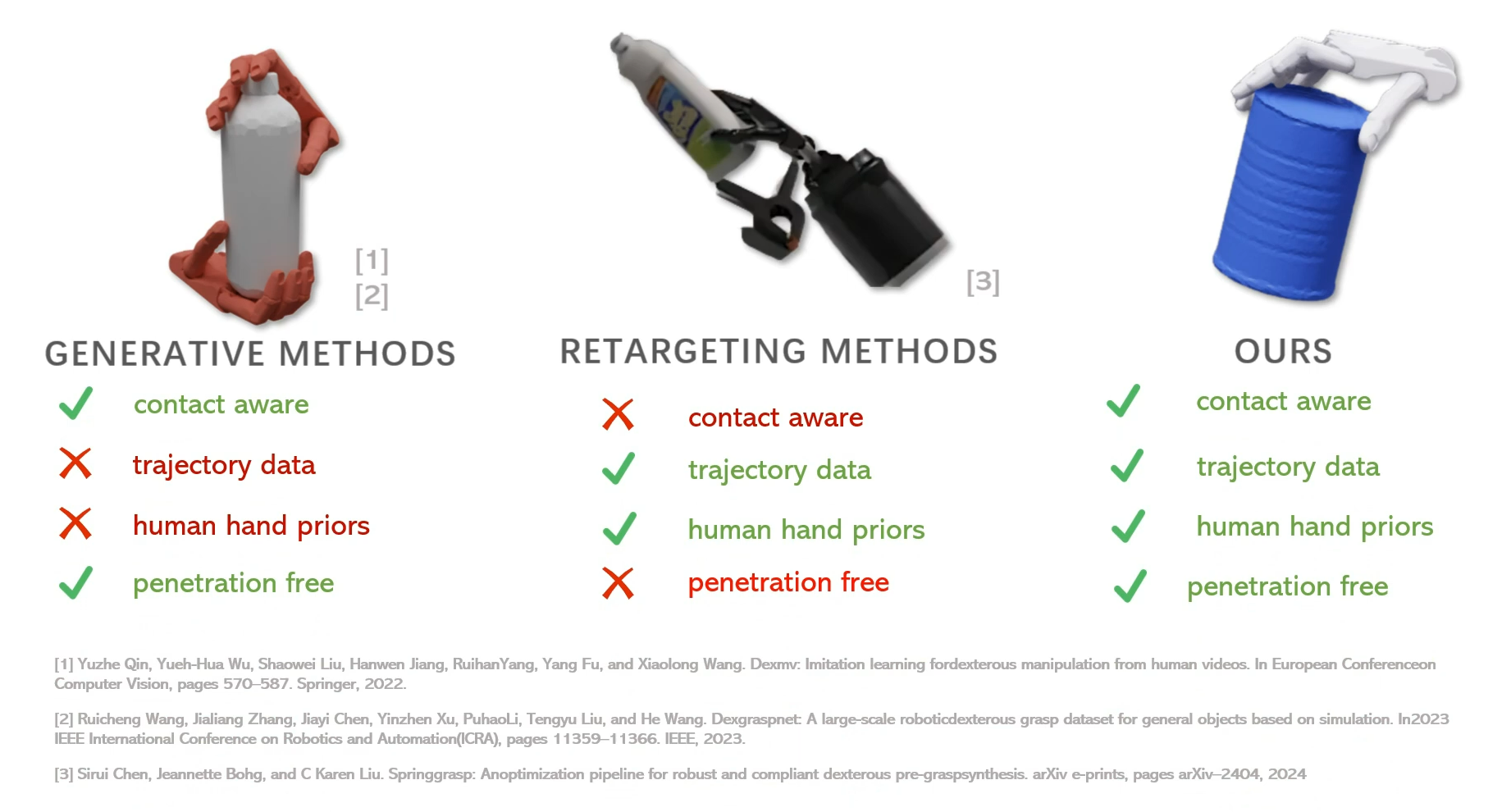
이 논문은 로봇 손을 위한 사실적인 능숙한 조작(dexterous manipulation) 데이터를 생성하는 데 있어서의 현재 한계점들을 해결하기 위한 새로운 통합 접근 방식인 DexFlow를 제안합니다. 기존의 리타겟팅(retargeting) 방법들은 종종 정확도가 낮고 손-객체 상호작용을 제대로 고려하지 못하여 상호관통(interpenetration)과 같은 아티팩트를 발생시키는 반면, 생성 모델(generative methods)들은 인간 손의 사전 지식(prior)이 부족하여 제한적이고 부자연스러운 포즈를 생성하는 문제에 직면합니다. DexFlow는 이러한 문제들을 극복하기 위해 인간 손과 객체 데이터를 여러 소스에서 통합하는 데이터 변환 파이프라인을 제안합니다. 이 접근 방식은 시간적 일관성(temporal consistency)을 보장하기 위해 차등 손실 제약(differential loss constraint)을 사용하고, 손-객체 상호작용을 정교화하기 위해 접촉 맵(contact maps)을 생성합니다. 실험 결과, 제안된 방법은 포즈 정확도, 자연스러움 및 다양성을 크게 향상시켜 손-객체 상호작용 모델링을 위한 견고한 해결책을 제시합니다.
주요 기여는 다음과 같습니다.
- 전역 포즈 탐색(global pose search)과 지역 접촉 정제(local contact refinement)를 결합한 계층적 최적화(hierarchical optimization) 접근 방식: 해부학적 정렬 정확도와 물리적 타당성(physical plausibility)을 동시에 다루는 새로운 에너지 수식(energy formulations)을 특징으로 합니다.
- 이중 임계값 감지(dual-threshold detection)와 프레임 간 평활화(frame-to-frame smoothing) 메커니즘을 포함하는 시간 인식 접촉 처리 파이프라인(temporal-aware contact processing pipeline): 기존 리타겟팅 방법에서 관찰되는 접촉 상태 변동의 68%를 효과적으로 해결합니다.
- 크로스-핸드 토폴로지 마이그레이션(cross-hand topology migration)을 지원하는 292K 프레임의 그랩(grasp)을 포함하는 첫 번째 포괄적인 벤치마크 데이터셋: 기존 리타겟팅 솔루션에 비해 의미적 성공률(semantic success rate)이 7.5배 향상되었음을 입증합니다.
II. 관련 연구
이 논문은 Vision-based teleoperation systems, 전통적인 retargeting frameworks, task-oriented grasp synthesis, 그리고 grasps transfer의 기존 연구들이 가진 한계점을 분석하고, 본 연구가 이러한 한계점들을 어떻게 극복하는지에 초점을 맞춥니다. 특히, 기존 retargeting methods의 침투 아티팩트(penetration artifacts), 불안정한 접촉(unstable contacts), 그리고 human motion priors의 비효율적인 활용 문제를 지적하며, DexFlow가 계층적 최적화와 시간적 일관성 통합을 통해 이러한 격차를 해소한다고 강조합니다.
III. 방법론
DexFlow 프레임워크는 세 가지 연속적인 단계로 구성됩니다.
- 먼저, 객체를 적응적으로 스케일링(scaling)하고 MANO 손 동작(hand motions)을 로봇 구성(robotic configurations)으로 리타겟팅하는 통합 전처리(unified preprocessing)를 수행합니다.
- 다음으로, 2단계 접촉 감지 시스템(two-stage contact detection system)이 공간 임계값(spatial thresholds)과 시간적 평활화(temporal smoothing)를 사용하여 후보 접촉점(candidate contact points)을 필터링하여 일시적인 아티팩트(transient artifacts)를 제거합니다.
- 마지막으로, 후속 손가락 관절 최적화(finger joint optimization)는 유효한 접촉 제약(effective contact constraints)이 있는 손가락만 고려하며, 엄지손가락부터 새끼손가락까지 각 손가락을 개별적으로 최적화하여 보다 정교한 접촉 최적화를 달성합니다.
A. Hand Model Alignment
MANO 손 모델의 zero-pose 파라미터를 ShadowHand 로봇 매니퓰레이터(robotic manipulator)에 정렬하기 위해 리타겟팅 작업을 수행합니다. 객체 모델과 MANO 손의 선형 치수(linear dimensions)를 s = 10^9 계수로 스케일링하여 포인트 클라우드와 로봇 손 사이의 겹침을 개선하고, ShadowHand의 손끝 위치(fingertip positions)를 MANO 손에 더 세밀하게 정렬합니다.
B. Retargeting as an optimization problem
리타겟팅 과정의 핵심은 로봇 매니퓰레이터의 관절 각도(joint angles)를 최적화하여 MANO 손에서 추출된 목표 포즈(target poses)에 맞추는 전역 탐색 알고리즘 GN CRS2 LM입니다.
시간 단계 t에서 로봇 매니퓰레이터의 관절 각도를 \mathbf{q}_t \in \mathbb{R}^n이라고 할 때, 여기서 n은 자유도(DoF)의 수입니다. 목적 함수는 다음과 같이 정의됩니다.
\min_{\mathbf{q}_t \in \mathbb{R}^n} \sum_{i=0}^N \| \mathbf{v}_i^H (\boldsymbol{\theta}_t, \boldsymbol{\beta}_t, \mathbf{r}_t) - \mathbf{v}_i^R(\mathbf{q}_t) \|^2 + \alpha \| \mathbf{q}_t - \mathbf{q}_{t-1} \|^2 \quad (1)
여기서 \mathbf{v}_i^H는 MANO 모델의 forward kinematics를 통해 계산된 인간 손의 Task-Space Vector (TSV)를 나타내며, \mathbf{v}_i^R은 로봇 매니퓰레이터의 TSV입니다. \alpha는 시간적 일관성(temporal consistency)을 보장하는 정규화 가중치(regularization weight)이며, N은 최적화에서 고려되는 TSV의 수입니다(N=13). 첫 번째 항은 로봇 손의 포즈가 Task Space에서 인간 손과 정렬되도록 보장하고, 두 번째 항은 프레임 간의 시간적 평활성을 강화합니다.
프레임 간의 급격한 관절 각도 변화를 해결하기 위해 차등 손실(differential loss) 제약 조건을 도입합니다.
L_{temp} = \lambda_T \sum_{t=2}^T \| \mathbf{q}_t - 2\mathbf{q}_{t-1} + \mathbf{q}_{t-2} \|_{\Sigma^{-1}}^2 \quad (2)
여기서 \Sigma \in \mathbb{R}^{28 \times 28}는 관절 운동 불확실성(joint motion uncertainty)을 나타내는 운동학적 공분산 행렬(kinematic covariance matrix)이고, \mathbf{q}_t, \mathbf{q}_{t-1}, \mathbf{q}_{t-2}는 현재, 이전, 두 단계 전 프레임의 관절 각도이며, \lambda = 0.1은 차등 손실에 대한 가중치입니다.
최적화 중에는 현재 프레임 상태 \mathbf{q}_t와 과거 윈도우 W_t = \{\mathbf{q}_{t-k}, \ldots, \mathbf{q}_t\}를 공동으로 최적화하기 위한 슬라이딩 윈도우(sliding window) 메커니즘을 설정합니다. 최종 최적화 문제는 다음과 같습니다.
\mathbf{q}^*_t = \arg \min_{\mathbf{q}_t} L_{align} + L_{temp} + \gamma \| \mathbf{q}_t - \mathbf{q}^{pred}_t \|^2 \quad (3)
여기서 L_{align}은 작업 간 정렬 손실을 나타내고, \mathbf{q}^{pred}_t = \mathbf{q}_{t-1} + \Delta t \dot{\mathbf{q}}_{t-1}은 이전 프레임의 속도를 기반으로 예측된 관절 각도이며, \gamma = 0.5는 운동 연속성(motion continuity)을 더욱 향상시키는 동적 평활화 가중치(dynamic smoothing weight)입니다. 이 목적 함수는 생성된 운동 궤적(motion trajectory)이 헤시안 행렬(Hessian matrix)의 정규화(regularization)를 통해 C^2 연속성(continuity)을 만족하도록 보장하여 물리적 타당성을 향상시킵니다.
C. Contact map
리타겟팅 후, 로봇 손 관절 각도 시퀀스는 인간 손 동작 시퀀스와 정렬됩니다. 객체와 상호작용하기 위한 보다 사실적인 관절 구성을 달성하기 위해 관절 각도를 추가로 정제합니다. 이를 위해, 손과 객체 사이의 상호작용 정보를 수집하기 위해 이중 임계값 알고리즘(dual-threshold algorithm)을 사용하여 접촉 맵을 추출합니다. 이 맵은 접촉 상태로 판단된 손 포인트 클라우드(hand point cloud)와 가장 가까운 객체 메쉬 정점(object mesh vertices) 간의 대응(correspondence)을 포함합니다. 그런 다음, 접촉 상태의 급격한 변화를 완화하기 위해 프레임 간 평활화(frame-to-frame smoothing)를 도입합니다.
- Dual-Threshold Contact Information Extraction: 로봇의 목표 위치(\mathbf{q}_t)를 매핑한 후, 이중 임계값 알고리즘을 사용하여 접촉 상태를 결정합니다. 각 손끝(fingertip)에 대해 손끝과 객체 표면 사이의 거리를 계산합니다. 거리가 하한 임계값(dis_{min})보다 작으면 손끝이 접촉 상태로 간주되고, 상한 임계값(dis_{max})보다 크면 접촉 상태가 아닌 것으로 간주됩니다. 거리가 두 임계값 사이에 있으면 손끝의 접촉 상태는 이전 프레임과 동일하다고 가정합니다.
- Frame-to-Frame Contact Inference: 이중 임계값 설정은 접촉 상태를 정확하게 포착하는 것과 원래 동작의 의미론적 일관성을 유지하는 것 사이의 절충이 필요합니다. 따라서, 노이즈(noisy fluctuations)로 인한 중간 프레임의 접촉 정보 지터(jitter) 문제를 해결하기 위해 운동학적 제약(kinematic constraints)을 통합한 시간적 일관성 인식 보간 메커니즘(temporal coherence-aware interpolation mechanism)을 개발합니다.
C_t = I \left( \frac{\|C_{t-1} + C_{t+1}\|^2}{2} + \alpha v_f \Delta t > \tau_c \right) \quad (4) 여기서 I(\cdot)는 지시 함수(indicator function)이고, \alpha=0.6은 속도 영향(velocity influence)을 조절하며, \tau_c=0.7은 접촉 신뢰도 임계값(contact confidence threshold)입니다. 속도 항 v_f \Delta t는 다음과 같이 프레임 간 손가락 변위(finger displacement)를 추정합니다. \Delta x = \int_{t-1}^{t+1} v_f(t) dt \approx \frac{1}{2} (v_{t-1} + v_{t+1}) \Delta t \quad (5)
세 단계의 결정 프로토콜은 물리적 타당성을 보장합니다.
- Motion Continuity Check: 5 프레임 윈도우(t-2, \ldots, t+2) 위치를 사용하여 3차 스플라인 궤적(cubic spline trajectory) T를 계산합니다. T(u) = \sum_{i=0}^3 a_i (u - u_{t-2})^i, \quad u \in [t-2, t+2] \quad (6)
- Contact Likelihood Estimation: 가속도(\ddot{T})를 기반으로 접촉 가능성(P_c(t))을 추정합니다. P_c(t) = \sigma (\beta_1 (\ddot{T}(t) - \ddot{T}_{object}(t))) \quad (7) 여기서 \sigma(\cdot)는 시그모이드 함수(sigmoid function)입니다.
- State Imputation: 최종 접촉 상태 C^{final}_t를 결정합니다. C^{final}_t = \begin{cases} C^{interp}_t, & \text{if } P_c(t) > 0.5 \land \nabla T(t) < v_{max} \\ C^{raw}_t, & \text{otherwise} \end{cases} \quad (8)
D. Third Stage Optimization
이 단계에서는 그랩 정확도(grasping accuracy)와 안정성(stability)을 향상시키기 위해 손 포즈, 특히 손가락 수준에서의 최적화에 중점을 둡니다. 최적화 과정은 각 손가락에 대한 개별 최적화로 나뉘어 접촉점과 손 포즈를 정밀하게 조정할 수 있습니다.
- Sequential Finger Ordering Prior to Optimization: 최적화 시작 전에 개별 손가락을 최적화하기 위한 사전 정의된 순서(엄지부터 새끼손가락까지)를 설정합니다. 이는 최적화 동작 공간을 줄이고(reducing the optimization action space), 주요 기능 손가락(primary functional fingers)이 충돌을 피하기 위해 부자연스럽게 변형되는 것을 방지합니다.
- Optimization Process: 최적화는 각 손가락의 손 포즈를 조정하는 것으로 시작합니다. 초기 손 포즈(initial hand pose)에서 각 손가락의 접촉점(contact points)이 정의되며, 목표는 이러한 접촉점과 관련된 에너지를 최소화하면서 손의 관절 각도를 실행 가능한 범위 내로 유지하는 것입니다. 최적화 과정은 다음 항들을 포함하는 가중치 에너지 함수(weighted energy function)를 활용합니다.
Distance Energy (E_{dis}): 손의 접촉점과 객체 표면 사이의 거리를 계산하여 적절한 상호작용을 보장하기 위해 이 거리를 최소화하는 것을 목표로 합니다. E_{dis} = \sum_{i=1}^n \| \mathbf{p}_i - \mathbf{o}_i \|^2 \quad (9) 여기서 \mathbf{p}_i는 손의 접촉점이고 \mathbf{o}_i는 객체의 해당 점입니다.
Penetration Energy (E_{pen}): 손이 객체를 관통하는 경우에 불이익을 줍니다. E_{pen} = \sum_{i=1}^n \max(0, \delta_i - d_i)^2 \quad (10) 여기서 \delta_i는 객체에서 손까지의 거리를 나타내고 d_i는 관통 깊이(penetration depth)입니다.
Alignment Energy (E_{align}): 손의 접촉점이 객체의 표면 법선 벡터(surface normal vectors)와 정렬되도록 장려하여 그랩이 물리적으로 타당하도록 보장합니다. E_{align} = \sum_{i=1}^n (1 - \mathbf{n}_i \cdot \mathbf{n}^O_i)^2 \quad (11) 여기서 \mathbf{n}_i는 손의 i-번째 접촉점에서의 법선 벡터이고, \mathbf{n}^O_i는 객체의 해당 접촉점에서의 법선 벡터입니다.
Self-Penetration Energy (E_{spen}): 손가락이나 손바닥이 서로 충돌하는 것을 방지하여 적절한 분리(separation)를 유지합니다. E_{spen} = \sum_{p \in P_c} \sum_{q \in P_o} \max(\delta - d(p, q), 0) \quad (12) 여기서 P_c는 현재 최적화된 손가락의 점 집합을 나타내고, P_o는 나머지 손가락의 점 집합을 나타냅니다. d(p, q)는 현재 손가락의 점 p와 다른 손가락의 점 q 사이의 거리를 측정하며, \delta는 충돌 패널티가 적용되는 임계 거리입니다.
Regularization Energy (E_{joints}): 이 항은 초기 손 포즈로부터의 큰 편차에 불이익을 주어 자연스러운 구성을 유지하는 데 도움을 줍니다. E_{joints} = \sum_{i=1}^d \| \theta_i - \theta_{init,i} \|^2 \quad (13) 여기서 \theta_i는 현재 관절 각도이고, \theta_{init,i}는 초기 관절 각도입니다.
총 에너지는 이러한 구성 요소들의 가중 합으로 이루어집니다. E_{total} = E_{dis} + w_{pen}E_{pen} + w_{align}E_{align} + w_{spen}E_{spen} + w_{joints}E_{joints} \quad (14) 여기서 w_{pen}, w_{align}, w_{spen}, w_{joints}는 각 에너지 항의 중요도를 제어하는 가중치입니다.
IV. 실험 결과
실험은 Intel Core i9-13900HK CPU, 32GB RAM, NVIDIA GeForce RTX 4080 GPU를 갖춘 Linux 시스템에서 수행되었습니다. 본 연구에서는 개선된 최적화 파이프라인을 기반으로 MANO 손 동작 캡처(motion capture) 데이터를 ShadowHand/Allegro 로봇에 리타겟팅하여 다중 모드 그랩 시퀀스(multi-modal grasp sequences)를 생성했습니다. 50개의 YCB 객체에 대해 292k 프레임의 최적화된 그랩 궤적(grasp trajectories)이 생성되었으며, 이는 안정적인 그랩(stable grasping), 동적 조정(dynamic adjustments), 다중 손가락 협업(multi-finger collaborative operations)과 같은 시나리오를 포함합니다. 또한, 동일한 인간 손 동작을 다른 로봇 손 구조에 매핑하여 의미론적 그랩 의도(semantic grasping intentions)를 보존하는 크로스-핸드 토폴로지 마이그레이션(cross-hand topology migration)이 지원됩니다.
Single-Frame Data Quality Evaluation
Isaac Gym [27]과 PhysX를 사용하여 시뮬레이션을 진행했습니다. 그랩의 성공 여부는 그리퍼(gripper)가 객체와 100 시뮬레이션 단계 동안 중력이 적용되는 모든 6축 정렬 방향(axis-aligned directions)에서 접촉을 유지하는 경우 성공으로 간주됩니다. 기존 분석적 합성 방법들과 비교했을 때, DexFlow는 접촉 품질에서 두 번째로 낮은 Contact Distance를 달성했으며, DexGraspNet 및 SpringGrasp에 비해 한 자릿수 향상을 보였습니다. 물리적 타당성 분석에서는 전통적인 방법에 비해 Penetration을 크게 줄였습니다. 본 방법은 40.32%의 Semantic Success Rate (SSR)를 달성하여 기존 리타겟팅 방법인 DexRetarget의 5.35%보다 7.5배 높은 성능을 보였습니다.
Trajectory Motion Quality Analysis
궤적 평가에는 시간 정렬된 Chamfer Distance (CD)가 사용되었습니다. CD = \frac{1}{T} \sum_{t=1}^T \min_{\mathbf{p} \in P^{ref}_t, \mathbf{q} \in P^{gen}_t} \| \mathbf{p} - \mathbf{q} \|^2 \quad (15) 여기서 P^{ref}_t와 P^{gen}_t는 각각 시간 단계 t에서의 참조 및 생성된 객체 포인트 클라우드입니다. 리타겟팅 단계에서 0.008 CD를 달성하여 DexRetarget의 0.016보다 50% 낮은 수치를 보였으며, 이는 뛰어난 시간적 형상 일관성(temporal shape consistency)을 나타냅니다. 이후 최적화에서도 이 장점(0.009 CD)이 유지되면서 관통(penetrations) 문제를 해결하여, 기하학적 충실도(geometric fidelity)와 물리적 타당성을 동시에 보존하는 이중 기능을 입증했습니다. 0.48의 Velocity KL Divergence (DexRetarget 대비 11% 향상)는 자연스러운 움직임 보존을 확인시켜주며, 통제된 가속도 증가(0.073에서 0.080 RMS)는 필요한 접촉 보정(contact corrections)을 반영합니다.
V. 결론
제안된 방법은 로봇 그랩 및 조작을 위한 새로운 패러다임을 확립하여 리타겟팅을 통해 로봇 그랩 데이터 획득을 크게 향상시킵니다. 생성된 단일 프레임(single-frame) 데이터의 품질이 아직 일부 기존 방법을 능가하지 못하고 모든 시나리오에서 그랩 성공이 완전히 보장되지 않을 수 있지만, 본 접근 방식은 핵심 지표에서 최첨단 방법과 비교할 수 있는 성능을 달성합니다. 나아가, 복잡한 손-객체 상호작용 작업에서 더 높은 정밀도, 자연스러움 및 다양성을 가능하게 합니다. 본 연구를 통해 얻은 통찰력과 데이터는 로봇 그랩 및 능숙한 조작의 미래 발전을 위한 귀중한 참고 자료가 될 것입니다.
2 Detail Review
DexFlow: 섬세한 손 포즈 리타게팅 및 상호작용을 위한 통합 접근법 (논문 심층 리뷰)
2.1 소개 (배경 및 문제점)
로봇의 섬세한 손 동작 조작(dexterous manipulation)을 위해 인간 손의 동작을 로봇 손으로 포즈 리타게팅(pose retargeting)하는 기술은 오랫동안 도전적인 문제로 남아 있습니다. 오늘날 인간 손의 모션 캡처 기술(예: MANO 모델 등)로부터 정밀한 손 추적이 가능해졌지만, 이를 로봇 손으로 옮기는 과정에는 여전히 여러 난제가 존재합니다. 대표적으로 (1) 인간 손과 로봇 손의 형태적 차이(길이, 관절 범위 등)로 인한 불일치, (2) 손과 물체 사이 접촉 상호작용을 제대로 모델링하지 못해 발생하는 비현실적인 동작(예: 손가락이 물체를 뚫고 지나가는 관통 현상 등), 그리고 (3) 비효율적인 최적화 과정으로 인한 실시간성 부족 및 부정확성 문제가 지적되어 왔습니다. 기존의 단순 운동학적 매핑 기반 리타게팅 방법들은 사람 관절 각도를 로봇 관절에 직접 대응시키지만, 사람/로봇 손 구조 차이를 고려하지 않아 손가락이 물체를 관통하거나 접촉이 불안정해지는 문제가 컸습니다. 한편 에너지 최적화 기반 접근들은 관통 페널티나 접촉 거리 최소화 같은 인위적인 비용 함수를 설계하여 문제를 풀려고 시도했으나, 인간 손 동작의 고유한 제약(예: 자연스러운 그립 형태)을 활용하지 못해 한계가 있었습니다. 또한 학습 기반 방법(예: DexPilot, AnyTeleop 등 실시간 테레오퍼레이션 기법)은 데이터 기반 사전지식을 활용하여 속도는 높였지만, 정밀한 공간 정렬이나 시간적 일관성 측면에서는 여전히 부족함을 보였습니다. 요컨대, 이전까지의 방법들은 정확도 vs. 속도, 물리적 현실감 vs. 데이터 다양성 사이에서 균형 잡힌 해법을 제시하지 못했습니다.
DexFlow는 이러한 문제들을 해결하기 위해 제안된 통합적 손 포즈 리타게팅 및 상호작용 모델로서, 사람 손의 동작을 로봇 손으로 옮기는 과정에서 정확성과 현실감, 그리고 데이터 확보 효율까지 모두 향상시키는 것을 목표로 합니다. 이 논문 리뷰에서는 DexFlow의 기술적 기여, 기존 연구와의 차별점, 그리고 실험 결과를 중점적으로 살펴보겠습니다.
2.2 기술적 기여 (핵심 아이디어 및 메커니즘)
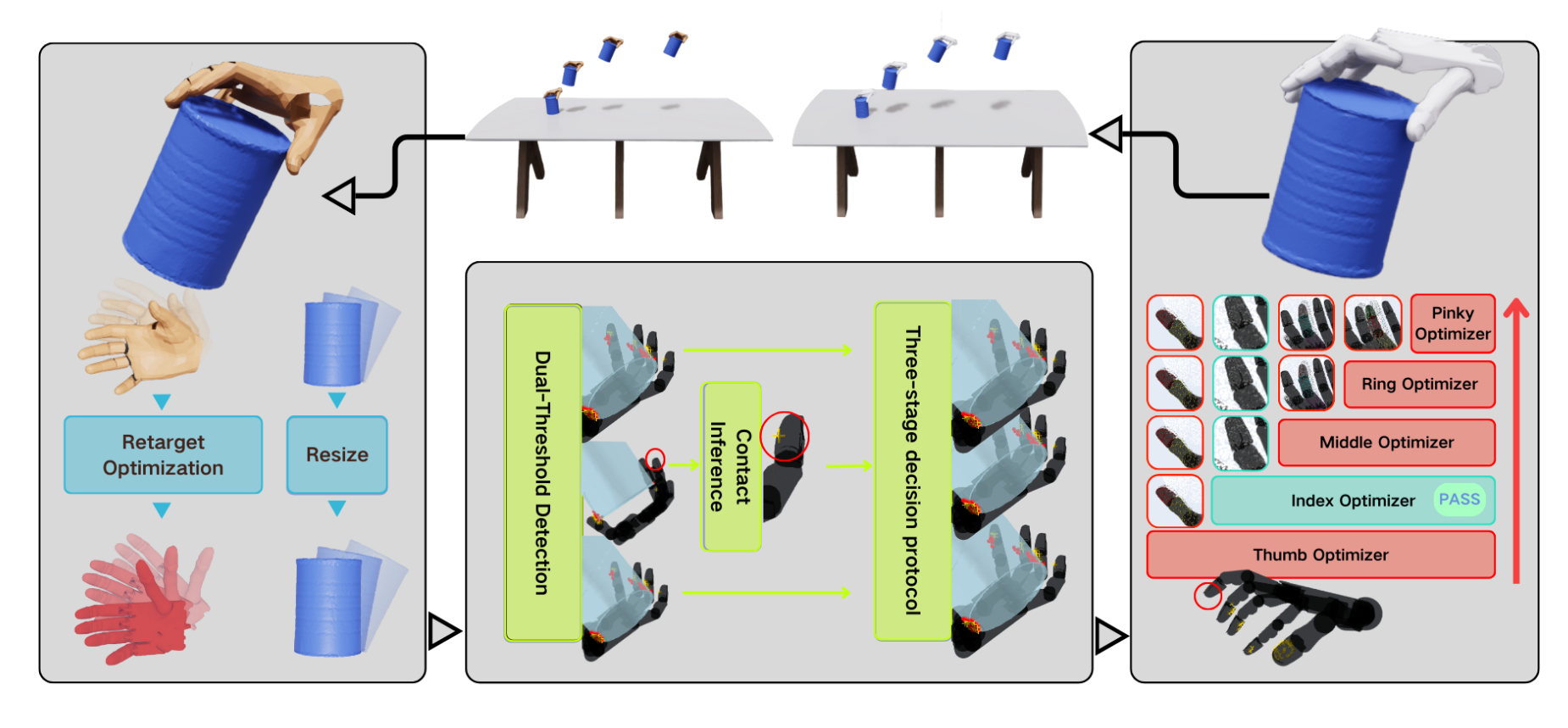
DexFlow가 제안하는 핵심 아이디어는 계층적 최적화와 접촉 인식을 결합한 파이프라인으로, 사람 손의 자연스러운 동작을 로봇 손에 이식하면서도 물리적으로 그립(grip) 상호작용이 사실적으로 유지되도록 하는 것입니다. 구체적으로, 전역 최적화 → 접촉 추출/필터링 → 국소 최적화의 3단계로 구성된 절차를 통해 문제를 단계별로 해결합니다. 아래에서는 DexFlow의 주요 기술적 기여를 세 가지 측면에서 정리합니다:
① 계층적 전역-국소 최적화 접근: 우선 사람 손 포즈와 최대한 유사한 로봇 손 초기 자세를 얻기 위해 전역 최적화(global search)를 수행합니다. 이는 사람 손 관절 구성과 로봇 손 관절 사이의 차이를 줄이는 에너지 함수를 정식화하여, 로봇 손이 해부학적으로 정렬된 자세를 취하도록 하는 단계입니다. 논문에서는 GN_CRS2_LM이라는 글로벌 탐색 알고리즘을 사용해 로봇 손의 관절 각도를 최적화했다고 설명하는데, 이 과정에서 사람 손의 관절 제약과 로봇 손의 기구학을 모두 고려하여 초기 관절 구성을 찾아냅니다. 이렇게 얻은 초기 포즈를 바탕으로, 두 번째 단계에서는 지역적 탐색 및 접촉 조정을 수행합니다. 즉, 전역 단계 결과를 출발점으로 빠르게 현실성 있는 손가락 구성을 찾아낸 뒤, 실제 물체와의 접촉을 고려한 미세 조정(contact-aware refinement)을 적용합니다. 이러한 2단계 최적화 전략을 통해 먼저 인간 동작의 거시적 형태를 맞추고, 이후 미시적 접촉까지 정확히 반영함으로써 해부학적 정합성과 물리적 개연성을 동시에 달성합니다. 특히, 저자들은 새롭게 설계된 에너지 항들을 도입하여 정렬 오차 최소화와 물리적 그립 안정성 두 목표를 균형 있게 달성했다고 강조합니다.
② 이중 임계값 접촉 감지 및 시간적 스무딩: DexFlow의 두 번째 기여는 손-물체 접촉 정보를 안정적으로 추출하는 모듈입니다. 전역 리타게팅 단계를 거친 로봇 손이 물체에 근접하고 난 후, 각 손가락이 물체에 접촉했는지 여부를 판정해야 합니다. 이를 위해 이중 임계값(double-threshold) 기반 접촉 검출 알고리즘을 도입합니다. 구체적으로, 손가락 끝과 물체 표면 사이 거리가 첫 번째 임계값 이내로 들어오면 잠정적으로 접촉으로 간주하고, 두 번째 더 엄격한 임계값을 적용해 노이즈나 오차로 인한 잘못된 접촉 판단을 걸러냅니다. 이렇게 프레임별 얻어진 접촉 정보는 바로 사용되지 않고, 인접 프레임들과 비교하여 스무딩됩니다. 즉, 접촉 상태가 한 프레임에서 발생했다 사라지는 일시적 플럭투에이션(출렁임)을 제거하기 위해 슬라이딩 윈도우 기반의 프레임-투-프레임 완화(smoothing) 처리를 합니다. 이러한 시간적 필터링을 거치면 잡음에 강인한 안정된 접촉 지도(contact map)를 얻을 수 있으며, 연속된 동작 시퀀스에서 접촉 여부가 일관성 있게 유지됩니다. 요약하면, 이중 기준으로 접촉을 검출하고 시간적으로 확정함으로써 기존 방법에서 흔했던 접촉 신호의 들쭉날쭉함을 효과적으로 해소했습니다.
③ 대규모 데이터 변환 파이프라인 및 크로스-핸드(topology) 이식: DexFlow는 단일 알고리즘에 그치지 않고, 데이터 생성 측면에서도 큰 기여를 합니다. 저자들은 DexFlow를 활용해 다양한 데이터 소스로부터 인간 손 및 객체 상호작용 데이터를 통합하고, 이를 통해 대규모 로봇 그립 동작 데이터셋을 구축했습니다. 구체적으로, 인간 손 모션 캡처 데이터(MANO 기반)와 여러 3D 물체 모델(YCB 벤치마크 객체 등)을 결합하여, 로봇 손(ShadowHand 및 Allegro Hand)에 대한 292,000프레임에 달하는 그립 시퀀스 데이터를 생성했습니다. 이 데이터셋은 다양한 그립 동작 시나리오(안정적 파지, 동적 조정, 여러 손가락 협력 등)를 포괄하며, 특히 한 인간 손 동작을 서로 다른 로봇 손 형태에 매핑하는 크로스-손 토폴로지 이식까지 지원하는 것이 특징입니다. 예를 들어, 인간 손의 하나의 grasp 동작(예: 집게 잡기, 감싸잡기 등)을 ShadowHand와 Allegro 같이 손가락 개수와 형태가 다른 로봇 손에 각각 전달해도 본래의 의도된 파지 형태가 유지되도록 합니다. 이러한 데이터 파이프라인을 통해 얻은 통합 데이터셋은 기존 대비 학습 및 평가에 유리한 규모와 다양성을 가지며, DexFlow의 성능 개선을 정량적으로 뒷받침합니다. 논문에 따르면 이 데이터셋을 활용한 DexFlow는 기존 리타게팅 솔루션들 대비 수 배에 이르는 semantic 성공률 향상을 보여주었다고 보고됩니다.
그림 1: DexFlow가 제안하는 손-물체 그립 리타게팅 파이프라인의 개략도. 사람 손 동작과 물체 상호작용 시퀀스(왼쪽)를 입력받아, (1) 객체 스케일 조정 및 초기 로봇 손 자세 리타게팅을 수행한다. 이후 (2) 이중 문턱 접촉 검출 알고리즘으로 로봇 손과 물체 간 초기 접촉 정보를 추출하고, 인접 프레임들에 걸쳐 시간적 스무딩을 적용하여 안정된 접촉 상태를 확보한다. 마지막으로 (3) 손가락별 세부 최적화 단계를 통해 접촉이 감지된 손가락(예: 엄지, 중지 등)을 순차적으로 미세 조정한다. 이때 접촉 정보가 없는 손가락(그림 예시의 검지)은 건너뛰어 불필요한 계산을 줄이고 효율을 높인다. 이런 단계적 최적화를 거치면 사람 손의 조작 의도가 로봇 손에 정확히 전달되는 동시에 물리적으로도 실행 가능한 파지 동작이 완성된다.
2.3 기존 연구와의 비교 (DexFlow의 차별점)
손 포즈 리타게팅 및 상호작용 분야에서 DexFlow가 가지는 차별점을 이해하기 위해, 몇 가지 대표적인 기존 접근들과 기술적으로 비교해보겠습니다.
직접 매핑 기반 리타게팅 vs. DexFlow: 초창기 리타게팅 기법들은 주로 운동학적 직접 매핑을 사용하여, 인간 손 각도를 로봇 손 관절에 단순 대응시켰습니다. 이러한 방법은 구현이 쉽고 실시간 적용에 유리하지만, 사람 손 vs. 로봇 손의 형태 차이(예: 손가락 길이, 관절 범위)가 반영되지 않아 손가락이 물체나 다른 손가락을 뚫고 지나가는 관통 문제가 심각했습니다. 예컨대 사람에겐 자연스러운 움켜잡는 동작이 로봇에 그대로 적용되면 로봇 손가락이 겹치거나 물체 내부로 들어가는 경우가 빈번했습니다. DexFlow는 이러한 문제를 전역 최적화 단계에서 로봇 손을 사람 손에 최대한 맞추고, 지역 접촉 최적화 단계에서 관통을 줄이는 방향으로 체계적으로 해결합니다. 즉, 단순히 관절각을 복사하는 대신 최적화 문제로 정식화하여 물리적 제약을 반영함으로써, 관통 아티팩트와 불안정한 접촉 패턴을 크게 개선했습니다. 결과적으로 DexFlow는 기존 직접 매핑 기법에 비해 현실적인 그립 재현을 달성합니다.
최적화 기반/물리 시뮬레이션 기법 vs. DexFlow: 관절 각도 최적화를 통해 그립을 생성하는 접근은 DexFlow 이전에도 존재했으며, 물리 시뮬레이터나 에너지 함수 최적화를 활용한 예로 GraspIt!, DexGraspNet, FRoGGeR, SpringGrasp 등이 있습니다. 이들은 물체 파지를 제약 충족 문제로 보고 접촉 안정성, 힘 폐쇄(grasp wrench) 등 조건을 만족하는 그립을 찾았습니다. 그러나 전통적 최적화 기법들은 대체로 계산량이 많고, 무엇보다 인간 손의 자연스러운 모션에 대한 사전지식이 부족했습니다. 예를 들어, FRoGGeR나 SpringGrasp 같은 물리 기반 방법은 다양한 그립을 만들어내지만 그 과정에서 사람스러운 손모양을 보장하지는 못하고, 해답 탐색에 긴 시간이 소요되었습니다. DexFlow는 이러한 점을 인간 시演 데이터 활용과 계층적 접근으로 개선했습니다. 사람 손 모션 캡처 데이터(MANO)를 기반으로 출발하기 때문에 초기 해가 현실성 있고, 이를 토대로 빠른 전역 탐색 후 국소 접촉 미세조정을 함으로써 계산 효율을 높였습니다. 실제 논문 비교에 따르면 DexFlow는 DexGraspNet 대비 접촉 거리(contact distance)를 한 자리 수로 줄이고** (6.90 → 0.77), SpringGrasp 대비 관통 깊이(penetration depth)를 크게 낮추는 등 물리적 품질 면에서 한 단계 향상된 결과를 보입니다. 특히 접촉 품질 면에서 DexFlow의 접촉 간격은 기존 대비 10배 이상 개선되었고, 관통 현상은 기존 방법들에 비해 현저히 감소했습니다. 다만 특정 최적화 기법(BODex 등)이 관통을 거의 완전히 제거하도록 특화된 경우도 있는데, DexFlow도 이에 버금가는 수준에 근접하면서도 전반적인 균형 잡힌 성능을 달성한 것이 특징입니다. 요약하면, DexFlow는 이전 최적화/시뮬레이션 기반 접근들의 물리적 현실성을 계승하면서도 인간 동작의 자연스러움과 계산 효율을 동시에 확보한 발전된 기법입니다.
학습 기반(영상·시演·강화학습) 기법 vs. DexFlow: 최근 들어 인간 동작 데이터를 활용한 학습 기반 접근도 다수 등장했습니다. DexMV는 비디오로부터 3D 손-물체 포즈 시퀀스를 추출하여 로봇으로 모방하는 시도를 했으나, 객체의 정확한 상태 정보를 가정해야 하는 등 현실 적용에 제약이 있었습니다. AnyTeleop, DexPilot 등의 텔레옵 제어 시스템은 카메라로 추적한 인간 손 동작을 로봇 손에 실시간 전송해 원격 조작을 구현했지만, 빠른 응답을 위해 정교함을 일부 포기하면서 정밀 작업에서 공간 정렬 오차가 발생하곤 했습니다. 또한 ViViDex와 같이 강화학습을 통해 인간 비디오 시演을 모방하는 접근도 제안되었는데, 물리적 그립 성공률을 높이기 위해 과거 궤적 보상 등을 사용하면서도 특정 작업별 대량의 학습 데이터가 필요하다는 단점이 있었습니다. 이와 달리 DexFlow는 명시적인 최적화와 접촉 검출 메커니즘으로 문제를 풀기 때문에, 새로운 작업이나 객체에 대해 범용적으로 적용하기 수월하고 특정 작업 데이터에 덜 의존적입니다. 또한 학습 기반 방법들이 간혹 놓치는 미세한 손가락 위치나 시간적 안정성을 DexFlow는 에너지 함수를 통한 미세조정과 스무딩으로 확보합니다. 결과적으로 DexFlow는 실시간성은 다소 양보하지만, 학습 기반 기법들이 달성하지 못했던 공간적 정확도와 일관성 있는 프레임간 동작을 구현하여 오프라인 데이터 생성 측면에서 뛰어난 성능을 보입니다. 생성된 데이터는 차후 학습 알고리즘의 학습용으로 활용될 수 있기 때문에, DexFlow는 기술 데모 뿐 아니라 데이터 기반 학습 파이프라인의 전처리로서도 의미가 큽니다.
2.4 실험 결과 분석 (성능 평가 및 시각화)
DexFlow의 유효성을 확인하기 위해 저자들은 다양한 벤치마크 실험을 수행했습니다. 실험은 주로 시뮬레이션 환경에서 이루어졌으며, 50개의 YCB 표준 물체에 대해 ShadowHand 로봇 손(5지)과 Allegro 로봇 손(4지)을 이용한 다수의 그립 시퀀스를 생성하고 평가했습니다. 앞서 언급한 바와 같이 약 292K (29만 2천) 프레임의 그립 데이터가 DexFlow로부터 생성되었고, 이 데이터를 기존의 공개 데이터셋 및 기법들과 비교 분석하였습니다.
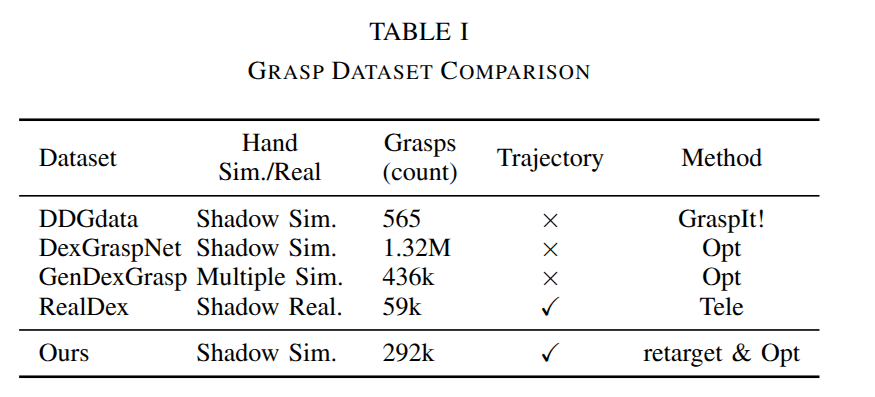
Table I은 DexFlow가 생성한 데이터셋과 기존 데이터셋들의 규모를 비교한 것입니다. 예를 들어, 기존 DexGraspNet은 약 132만 개의 그립을 시뮬레이션으로 생성한 반면, DexFlow는 50개 물체에 대해 29만여 프레임의 연속 동작 시퀀스를 제공함으로써 다양한 시나리오를 포괄하는 새로운 데이터 자원을 제시했습니다. 또한 DexFlow 데이터는 다양한 로봇 손 구조(Shadow, Allegro)에 모두 적용 가능하도록 생성된다는 점에서, 특정 손에 한정되지 않는 범용성을 입증했습니다.
2.4.1 정량적 지표 비교 (Single-Frame 기준 성능)
논문에서는 DexFlow의 성능을 기존 방법들과 정량적으로 비교하기 위해 여러 품질 지표를 측정하였습니다.
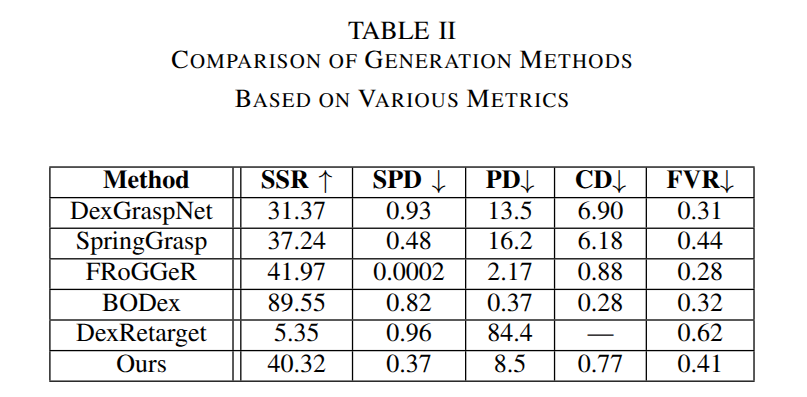
Table II는 대표적인 생성 기법들의 성능을 비교한 표로, 주로 단일 프레임 기준의 그립 품질 통계를 담고 있습니다. 여기에는 Semantic Success Rate (SSR), 생성 속도(SPD), 관통 깊이(PD), 접촉 거리(CD), 그립 안정성 지표(FVR) 등이 포함됩니다. 각 지표는 BODex라는 선행 연구의 평가 프로토콜을 따르는데, 간략히 설명하면 다음과 같습니다:
- Semantic Success Rate (SSR): 생성된 그립이 성공적인 파지로 간주되는 비율입니다. 논문에서는 물리 시뮬레이션 상에서 어떤 방향으로 중력을 걸어도 100 스텝 동안 물체를 놓치지 않으면 성공으로 판정하였으며, 그 비율을 SSR로 보고합니다. 값이 높을수록 많은 그립이 실제로 물체를 들 수 있음을 의미합니다.
- 생성 속도 (SPD): 초당 몇 개의 그립을 생성할 수 있는지를 나타내는 지표로 볼 수 있습니다. 수치가 클수록 데이터 생성 속도가 빠름을 의미하며, 실시간성에 가까움을 나타냅니다.
- 관통 깊이 (PD): 손가락 메쉬가 물체를 얼마나 깊게 관통했는지를 측정한 값입니다. 값이 작을수록 관통이 적어 물리적으로 더 타당한 파지입니다.
- 접촉 거리 (CD): 손가락과 물체 사이 접촉점 간격을 나타냅니다. 이 값이 작을수록 손가락이 물체를 빈틈없이 밀착하게 잡고 있음을 의미합니다. (일부 문맥에서 Chamfer Distance를 의미하기도 하나, 여기서는 접촉 품질 관련 지표로 활용되었습니다.)
- FVR: 논문에서 정의한 추가적인 품질 지표로, (force closure나 grasp 안정성과 연관된 비율로 추정됩니다. 값이 높을수록 안정적인 그립일 가능성이 높음)
이러한 지표로 비교한 결과, DexFlow는 전반적으로 균형 잡힌 성능을 보여주었습니다. 우선 Semantic Success Rate(SSR)을 보면, DexFlow는 약 40.3%의 성공률을 달성하여, 기존 전통적 리타게팅 방법인 DexRetarget의 5.35%에 비해 큰 폭(약 7.5배)으로 향상된 것을 확인할 수 있습니다. (DexRetarget은 DexMV의 후속 오픈소스 기법으로, 접촉 고려가 없어 성공률이 매우 낮았습니다.) DexFlow의 SSR 40%대는 학습 기반 최적화 기법인 FRoGGeR의 41.97%와 거의 유사한 수준으로, 데이터 기반 접근이 아닌 방법론으로 이룬 성과치고는 매우 고무적입니다. 한편 BODex라는 최적화 기법은 SSR이 89.5%로 유달리 높았지만, 이는 특정 로봇 손에 특화된 접근으로 DexFlow와 직접 비교하기엔 성격 차이가 있습니다. 그 외의 기법들(DexGraspNet: 31.4%, SpringGrasp: 37.2%)과 비교하면 DexFlow가 가장 앞선 그룹에 속함을 알 수 있습니다.
다른 물리적 지표들을 살펴보면, 관통 깊이(PD) 측면에서 DexFlow는 8.5로, 기존 리타게팅(예: DexRetarget의 84.4)에 비해 현격히 낮은 관통을 보였습니다. 이는 DexFlow의 접촉 최적화 단계가 손가락이 물체를 지나치게 파고드는 현상을 효과적으로 억제했음을 나타냅니다. 비록 FRoGGeR나 BODex가 관통 깊이를 각각 2.17, 0.37까지 줄여 DexFlow보다 더 우수하지만, 이들은 물리엔진 기반의 반복 최적화로 계산 비용이 큰 대가를 치른 결과입니다. 접촉 거리(CD)는 DexFlow가 0.77을 기록하여, FRoGGeR(0.88)보다 낮고 BODex(0.28) 다음으로 두 번째로 우수한 접촉 밀착도를 보였습니다. DexFlow의 CD는 DexGraspNet(6.90)이나 SpringGrasp(6.18)에 비해 10배 이상 작은 값으로, 사람이 잡듯이 빈틈없이 물체를 쥐는 자연스러운 그립을 얻었음을 알 수 있습니다. 마지막으로 생성 속도(SPD)를 보면 DexFlow는 0.37로, 1.0에 가까운 DexRetarget(0.96)보다는 느리지만 DexGraspNet(0.93)과 유사한 수준이고 SpringGrasp(0.48)보다는 약간 느린 정도였습니다. 특히 FRoGGeR의 SPD가 0.0002에 불과한 것과 비교하면, DexFlow가 현실적인 시간 안에 데이터 생성을 수행할 수 있음을 의미합니다 (FRoGGeR는 물리 기반 미분 가능 최적화를 사용하여 한 개 그립을 찾는데 매우 오래 걸림). 종합하면, DexFlow는 절대적인 성공률 면에서 일부 최적화 기법에 약간 뒤쳐질지 몰라도, 관통/접촉/속도 등 여러 지표에서 고르게 우수한 “균형형” 성능을 발휘한다는 것이 실험으로 입증되었습니다. 이는 곧 DexFlow가 현실적인 로봇 그립 데이터 생성에 전반적으로 적합한 접근임을 보여줍니다.
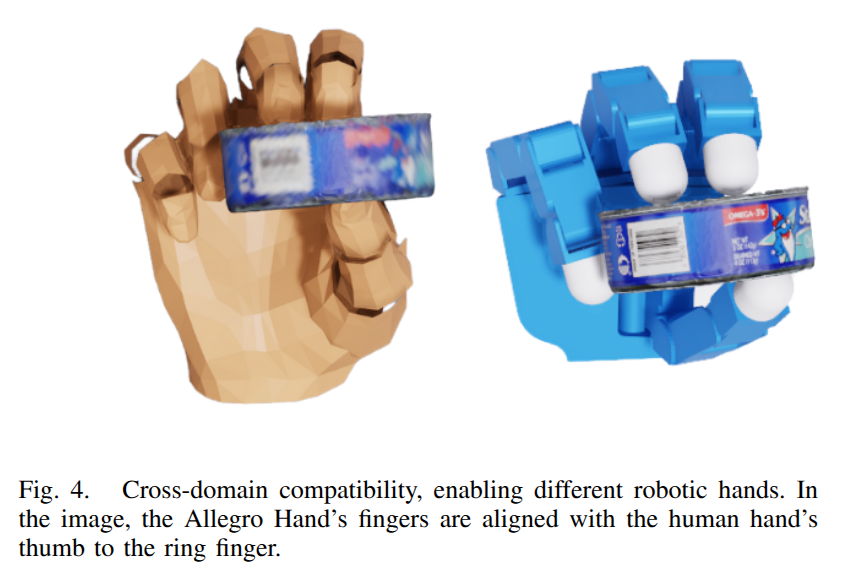
그림 2: 크로스-도메인 손 모션 이식에 대한 DexFlow의 데모 장면. 왼쪽은 인간 손이 작은 상자를 검지와 엄지 손가락으로 집는 pinch grasp 동작이고, 오른쪽은 해당 동작을 Allegro 로봇 손(파란색, 4손가락)으로 리타게팅한 결과입니다. 사람 손의 엄지~약지 4개 손가락 움직임이 로봇 손의 4개 손가락에 자연스럽게 대응되어, 로봇 손도 동일한 물체를 성공적으로 집을 수 있습니다. DexFlow는 이처럼 서로 형태가 다른 로봇 손들 간에도 일관된 파지 동작 이식을 가능케 하며, 인간 손 동작의 의미론적 의도(어떤 방식으로 잡는가)를 유지한다는 점에서 큰 강점을 보입니다.
2.4.2 시퀀스 모션 품질 및 동작 자연스러움
DexFlow의 평가에서는 단일 프레임 성공률뿐 아니라, 연속적인 동작 시퀀스의 품질도 중요하게 다루어졌습니다. 이를 위해 논문에서는 시간에 따른 물체 위치 변화를 정밀 비교하는 Chamfer Distance (CD) 기반 지표와, 속도/가속도 프로파일의 차이를 분석하였습니다. 우선 시퀀스 Chamfer 거리는 각 시점에서 물체의 점군(point cloud)을 비교하여 로봇 손이 물체를 움직이는 궤적이 원본 인간 시연과 얼마나 일치하는가를 나타냅니다. DexFlow의 1단계 리타게팅 결과는 Chamfer Distance가 0.008로, 기존 DexRetarget의 0.016보다 절반으로 감소했습니다. 이는 로봇 손이 물체를 움직이는 궤적의 형상이 사람 손의 궤적과 매우 가깝게 맞아떨어진다는 것을 의미하며, DexFlow의 전역 최적화가 공간적 정합성을 크게 개선했음을 보여줍니다. 이어서 접촉 최적화 후에도 Chamfer 값이 0.009로 소폭 증가했을 뿐으로, 여전히 DexRetarget 대비 상당히 낮은 오차를 유지했습니다. 즉, DexFlow는 형태 추종 면에서 뛰어난 정확도를 유지하면서도 관통 문제를 해결하는 두 마리 토끼를 잡았다고 볼 수 있습니다.
또한 DexFlow가 생성한 동작의 시간적 자연스러움을 측정하기 위해 속도 분포 차이와 가속도 변화를 비교했습니다. 인간 손 동작 대비 로봇 손 동작의 속도 분포 차이는 KL 발산으로 측정되었는데, DexRetarget의 값이 0.54인 반면 DexFlow 리타게팅 결과는 0.48로 더 낮아졌습니다. 이는 로봇 손 움직임의 속도 패턴이 인간의 원본 동작과 더 유사해졌음을 의미합니다. 접촉 최적화를 거치면서 속도 분포 차이는 약간 증가하여 0.57이 되었지만, 이는 접촉을 조정하는 과정에서 불가피한 미세 조정이 들어갔기 때문입니다. 그에 반해 가속도 RMS 값은 DexRetarget의 0.083에서 DexFlow 리타게팅 단계에서 0.073으로 감소하였다가, 최종 최적화 후 0.080으로 소폭 상승하였습니다. 가속도 RMS 증가는 손가락 관통을 없애는 마지막 단계 최적화에서 다소 급격한 조정이 추가된 영향이지만, 여전히 DexRetarget 수준과 비슷하게 유지되었습니다. 저자들은 이러한 변화를 두고 “리타게팅 단계에서는 기하학적 정합성을 극대화하여 Chamfer 오차를 줄이고, 이후 물체 중심의 세밀 조정 단계에서 약간의 가속도 증가(움직임 변화)를 받아들이는 균형 잡힌 최적화 전략”이라고 설명합니다. 즉, 1단계에서는 형상을 맞추고 2단계에서는 물리적 충돌을 해결하는 분리 최적화 덕분에, 전체적으로 자연스러운 움직임 흐름은 최대한 보존하면서 필요한 부분만 수정할 수 있었다는 것입니다.
마지막으로, DexFlow가 생성한 다양한 그립 동작들은 시각적으로도 자연스럽고 다양한 것으로 나타났습니다. 논문에는 여러 물체에 대한 로봇 손의 파지 결과들을 나열한 그림이 포함되어 있는데, 이를 통해 DexFlow가 큰 물체부터 작은 도구, 원통형 물체, 박스형 물체 등에 이르기까지 다양한 형태의 그립을 구현하는 모습을 볼 수 있습니다. 특히 사람 손의 의도가 잘 반영되어, 예를 들어 긴 막대형 물체는 집게손가락과 엄지로 집는 동작, 큰 원통형 물체는 손바닥 전체로 감싸쥐는 동작 등 맥락에 맞는 파지 형태가 나오는 것이 인상적입니다. 이러한 정성적 결과는 DexFlow의 데이터가 자연스러운 인간 그립 동작을 닮았기 때문으로, 기존 생성 기법에서 지적된 부자연스러운 손모양 문제를 크게 완화시켰습니다.
2.5 결론 및 시사점
DexFlow는 인간 손 모션을 로봇 손으로 옮기는 손 포즈 리타게팅 문제와, 로봇 손의 물체 파지 상호작용 문제를 하나의 프레임워크 안에서 효과적으로 해결한 통합 접근법입니다. 기술적으로 전역-국소 이중 단계 최적화, 접촉 상태 인식 및 시간적 안정화, 대규모 데이터 통합 등의 기여를 통해, 기존 방법들이 개별적으로 다뤘던 문제들을 한꺼번에 addressed하였습니다. 실험 결과 DexFlow는 정량적 지표에서 기존 대비 뛰어난 성능(특히 성공률 약 7~8배 향상, 관통/접촉 오류 감소 등)을 보였고, 정성적으로도 인간스러운 그립 동작을 다양하게 구현해냈습니다. 비록 일부 최고 성능 기법들과 비교해 단일 프레임 성공률만 놓고 보면 절대값에서 약간 모자랄 수 있으나, DexFlow는 종합적인 균형과 데이터 활용성 면에서 새로운 패러다임을 제시했다고 평가할 만합니다. 특히 본 논문이 제공하는 대규모 로봇 손 조작 데이터셋과 접촉 처리 기법은 향후 이 분야 연구자들에게 소중한 자원이자 아이디어의 기반이 될 것입니다. 저자들도 논문에서 현재 한계로 입력 데이터(인간 시연)의 정밀도 문제와 메타데이터 오차에 따른 제한사항을 언급하며, 앞으로 비디오로부터 직접 신뢰도 높은 접촉 정보를 얻는 방향 등 추가 연구 과제를 남겼습니다. 그럼에도 불구하고 DexFlow는 로봇 손의 섬세한 조작을 위한 데이터 생성과 모델링에 있어서 새로운 지평을 열었으며, 향후 로봇 학습, 텔레로보틱스, 인간-로봇 상호작용 분야에서 다양하게 응용될 것으로 기대됩니다. 전체적으로 DexFlow는 손 기반 조작 연구 커뮤니티에 정확성, 자연스러움, 다양성을 모두 충족시키는 솔루션의 가능성을 보여준 의미있는 성과입니다.
참고 문헌: DexFlow 논문 원문 및 관련된 선행 연구들을 참조하였습니다.