📃DrEureka 리뷰
- 🤖 이 논문은 시뮬레이션에서 학습된 로봇 정책을 실제 환경으로 전이시키는 과정에서 보상 함수와 시뮬레이션 물리 파라미터의 수동 설계 및 튜닝으로 인한 비효율성을 해결하기 위해 LLM 기반의 DrEureka를 제안합니다.
- ⚙️ DrEureka는 LLM을 활용하여 안전 지침이 포함된 보상 함수를 자동 생성하고, 초기 정책을 통해 환경 물리 파라미터의 Reward-Aware Physics Prior (RAPP)를 구축한 뒤, 이 사전 정보를 바탕으로 Domain Randomization 구성을 최적화합니다.
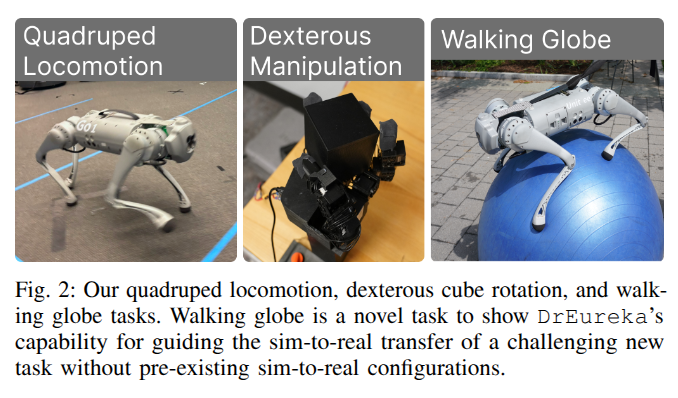
- 🚀 제안된 DrEureka는 사족 보행 및 정교한 조작 작업에서 기존의 수동 설계 방식과 대등하거나 더 나은 성능을 보였으며, 요가 볼 위에서 로봇 균형 잡기와 같은 새로운 도전적인 작업도 수동 개입 없이 성공적으로 해결하여 sim-to-real 전이를 가속화하는 잠재력을 입증했습니다.
Brief Review
이 논문은 로봇 기술 습득을 가속화하기 위해 시뮬레이션에서 학습된 정책을 실제 환경으로 전이시키는 Sim-to-Real(시뮬레이션-실제 환경 전이) 과정에서 발생하는 수동 설계 및 튜닝의 문제점을 해결하고자 합니다. 특히, 보상 함수(reward function) 설계와 시뮬레이션 물리 파라미터의 도메인 랜덤화(Domain Randomization, DR) 분포 설정에 필요한 상당한 인적 노력과 시간을 줄이는 데 중점을 둡니다.
본 논문은 대규모 언어 모델(Large Language Models, LLMs)의 물리적 상식(physical common sense) 및 가설 생성 능력을 활용하여 이러한 Sim-to-Real 설계 과정을 자동화하는 DrEureka라는 새로운 접근 방식을 제안합니다. DrEureka는 대상 작업에 대한 물리 시뮬레이션만 주어지면, 실제 환경 전이를 지원하기에 적합한 보상 함수와 도메인 랜덤화 분포를 자동으로 구성합니다.
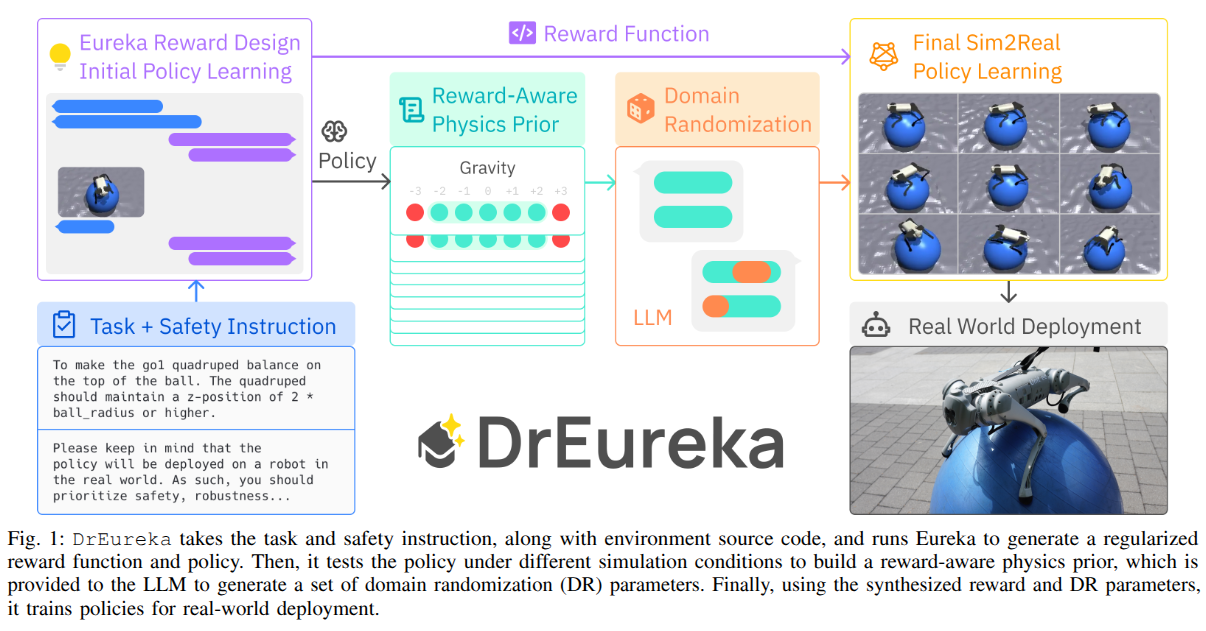
DrEureka의 핵심 방법론은 세 가지 주요 단계로 구성됩니다:
- LLM 기반 보상 함수 합성 (LLM-Guided Reward Function Synthesis):
- 이 단계는 Eureka [9]의 보상 함수 설계 원칙을 기반으로 하되, Sim-to-Real 설정에 맞게 개선되었습니다.
- LLM은 태스크 설명(l_{\text{task}})과 환경 코드(M)에서 제공되는 환경 상태 및 액션 공간 요약을 입력으로 받습니다.
- 특히, DrEureka는 프롬프트에 안정성(safety), 부드러움(smoothness), 바람직한 태스크별 속성 등을 명시적으로 고려하도록 “안전 지침(safety instruction)”(l_{\text{safety}})을 추가합니다. 이는 LLM이 실제 환경 전이에 더 적합한 안전 보장형(safety-regularized) 보상 함수를 생성하도록 유도합니다.
- LLM은 여러 보상 함수 후보를 코드로 생성하고, 각 후보는 강화 학습(Reinforcement Learning, RL)을 통해 정책을 학습하고 태스크 점수(F)를 계산하여 평가됩니다.
- 이러한 점수와 학습 통계(예: 학습 중 보상 구성 요소의 값)는 LLM에 피드백으로 제공되어 더 나은 보상 함수를 반복적으로 발전시킵니다.
- 최종적으로, 이 단계에서는 최적의 보상 함수(R_{\text{DrEureka}})와 이에 상응하는 초기 정책(\pi_{\text{initial}})을 얻습니다: R_{\text{DrEureka}}, \pi_{\text{initial}} := \text{Eureka}(M, l_{\text{task}} + l_{\text{safety}})
- 보상 인지 물리 사전 생성 (Reward-Aware Physics Prior, RAPP):
- 안전한 보상 함수는 정책 행동을 규제하지만, Sim-to-Real 전이에는 충분하지 않습니다.
- DrEureka는 학습된 초기 정책(\pi_{\text{initial}})을 사용하여 도메인 랜덤화 파라미터에 대한 “보상 인지 물리 사전”(RAPP)을 구축합니다.
- RAPP의 목적은 \pi_{\text{initial}}이 여전히 성능을 발휘할 수 있는 환경 파라미터의 최대 다양성 범위를 찾는 것입니다. 이는 도메인 랜덤화가 태스크 보상 함수에 따라 달라져야 하며, 도메인 랜덤화 없이 학습된 정책 행동에 맞게 커스터마이징되어야 한다는 통찰에서 출발합니다.
- 구체적으로, RAPP는 각 도메인 랜덤화 파라미터에 대해 “실행 가능한(feasible)” 값의 하한 및 상한을 계산합니다. 이는 광범위한 잠재적 값들을 탐색하고, 각 값을 시뮬레이션에 설정한 후(S.p = r), \pi_{\text{initial}}을 이 수정된 시뮬레이션에서 실행합니다. 정책의 성능이 미리 정의된 성공 기준을 만족하면 해당 값은 해당 파라미터에 대해 실행 가능한 것으로 간주됩니다.
- 각 파라미터에 대한 실행 가능한 모든 값 집합이 주어지면, 파라미터의 하한 및 상한은 최소 및 최대 실행 가능한 값으로 설정됩니다. 이 과정은 계산적으로 가볍고 병렬적으로 효율적으로 수행될 수 있습니다.
- LLM 기반 도메인 랜덤화 구성 생성 (LLM for Domain Randomization):
- 이 최종 단계에서는 RAPP가 계산한 각 DR 파라미터에 대한 범위 정보를 LLM에 컨텍스트로 제공합니다.
- LLM은 이 컨텍스트를 바탕으로 (1) 랜덤화할 물리 파라미터의 부분집합을 선택하고, (2) 선택된 각 파라미터에 대한 랜덤화 범위를 결정하도록 지시받습니다.
- 이는 LLM의 제로샷(zero-shot) 가설 생성 능력을 활용하여 여러 독립적인 DR 구성 후보(\mathcal{T}_1, \ldots, \mathcal{T}_m)를 생성합니다.
- 마지막으로, 생성된 보상 함수(R_{\text{DrEureka}})와 각 DR 구성(\mathcal{T}_i)을 사용하여 RL을 통해 최종 정책(\pi_{\text{final},i} = \text{A}(M, \mathcal{T}_i, R_{\text{DrEureka}}))을 학습하고 실제 환경에 배포합니다.
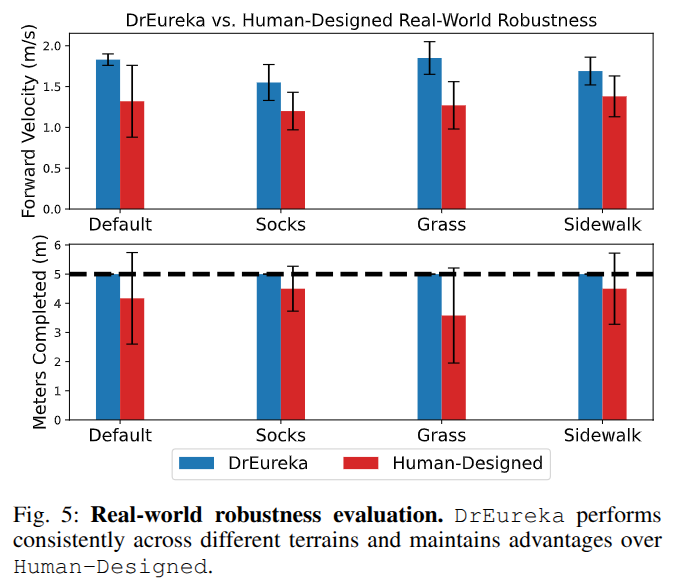
DrEureka는 quadrupedal locomotion 및 dexterous manipulation 태스크에 대한 평가에서 기존의 수동 설계 구성과 비교하여 경쟁력 있는 성능을 보였습니다. 예를 들어, quadruped locomotion 태스크에서 DrEureka로 학습된 정책은 인간 설계 보상 함수 및 DR 파라미터로 학습된 정책보다 전진 속도에서 34%, 이동 거리에서 20% 더 우수한 성능을 나타냈습니다. 또한, 요가 볼 위에서 균형을 잡고 걷는 것과 같은 새로운 로봇 태스크를 수동 설계 없이 해결할 수 있음을 입증했습니다. 이는 DrEureka가 로봇 기술 발견을 가속화할 잠재력을 가지고 있음을 시사합니다.
요약하면, DrEureka는 LLM을 활용하여 Sim-to-Real 전이의 핵심 병목인 보상 설계와 도메인 랜덤화 파라미터 구성을 자동화함으로써, 인간의 개입 없이도 효과적이고 실제 환경에 강건한 로봇 정책을 학습할 수 있게 하는 혁신적인 프레임워크입니다.
Detail Review
DrEureka: LLM 활용 Sim-to-Real 전이 – 논문 리뷰 (RSS 2024)
시뮬레이션에서 학습한 정책을 현실의 로봇에 그대로 이식(Sim-to-Real) 하는 것은 로봇 기술 확장에 매우 유망한 접근입니다. 그러나 기존 Sim-to-Real 전이 기법들은 작업 보상 함수 설계와 시뮬레이터의 물리 파라미터 튜닝을 사람 손으로 반복 조정해야 했기에, 많은 시간과 노력이 들었습니다 . 이번 리뷰에서는 이러한 과정을 대규모 언어 모델(LLM)로 자동화하여 시뮬레이션-현실 전이 설계를 가속화한 연구 “DrEureka: Language Model Guided Sim-To-Real Transfer”를 살펴보겠습니다 . 이 논문은 2024년 Robotics: Science and Systems (RSS)에 발표되었으며, UPenn·UT Austin·NVIDIA 연구진이 협업한 결과물입니다. DrEureka는 물리 시뮬레이터만으로 인간 전문가 수준의 보상 함수와 도메인 랜덤화 구성요소를 자동 생성해, 별도 수작업 없이도 현실 로봇에 적용 가능한 정책을 학습시켰습니다 . 아래에서는 논문의 핵심 아이디어와 기여, 기술적 접근 방법, 실험 및 결과, 기존 대비 차별점, 한계와 향후 과제를 차례로 정리합니다.
1. 논문의 핵심 아이디어와 주요 기여
DrEureka의 핵심 아이디어는 LLM을 활용해 Sim-to-Real 과정의 난점을 자동화하는 것입니다. 구체적으로, 사람이 일일이 짜던 보상 함수 설계와 도메인 랜덤화(Domain Randomization) 파라미터 설정을 LLM이 대신 수행합니다 . 이를 통해 시뮬레이션에서 현실로 지식이나 정책을 옮길 때 필요한 까다로운 설계 작업을 대폭 줄이고, 자동화된 파이프라인으로 신속하게 최적 구성을 찾아냅니다 .
주요 기여
- LLM 기반 Sim-to-Real 자동화 기법 제안 – 보상 함수 설계와 물리 파라미터 도메인 랜덤화를 동시에 자동 구성하는 DrEureka 알고리즘을 제시 .
- 다양한 로봇 과제에 대한 실세계 검증 – 사족보행 로봇 Unitree Go1의 고속 전진 보행, 로봇 손(LEAP Hand)의 큐브 조작 등에서 인간 전문가 설계보다 우수한 정책을 달성 .
- 새로운 난제 과제에서의 성공적 전이 – 요가 공 위 걷기라는 완전히 새로운 과제를 시뮬레이션 기반 자동 커리큘럼으로 학습하고, 현실 로봇에 곧장 적용해 수 분간 균형을 유지하는 결과를 달성 .
2. 사용된 방법론과 기술적 접근 분석
DrEureka는 세 단계 파이프라인을 통해 환경과 보상 설계를 자동화합니다 .
- 보상 함수 생성
- 과제 설명과 안전 지침을 LLM(GPT-4 등)에 제공.
- LLM이 보상 함수 코드(예: 파이썬+NumPy)를 작성.
- “안전 프롬프트”를 통해 무리한 가속, 관절 손상을 유발하는 보상을 피하고, 안전성과 효율성을 동시에 고려하도록 유도 .
- 여러 후보를 시뮬레이션에서 평가 후 성능이 가장 좋은 보상 함수를 선택 .
- RAPP (Reward-Aware Physics Prior)
- 선택된 정책을 시뮬레이터에 넣고, 물리 파라미터(마찰, 질량, 감쇠, 관성 등)를 하나씩 변화시켜 정책 성능이 유지되는 범위를 찾음 .
- 정책이 실패하지 않는 최소–최대 허용 범위를 기록하여, 이후 LLM에게 전달할 물리 prior로 활용 .
- 이 단계는 정책이 견딜 수 있는 물리적 한계를 탐색하는 과정으로, 과도하게 넓은 랜덤화를 방지 .
- LLM 기반 도메인 랜덤화 생성
- LLM에 랜덤화 가능한 파라미터와 RAPP 범위를 제공 .
- LLM이 어떤 파라미터를 어떤 분포로 샘플링할지 제안(예: 마찰 0.6–1.0 범위에서 균일 분포) .
- LLM이 동시에 여러 후보안을 생성, 각각을 시뮬레이터에서 RL 훈련하여 최종적으로 현실에서 가장 성능 좋은 정책 선택 .
이 과정을 반복함으로써 DrEureka는 LLM–시뮬레이터 공진화 루프를 형성하고, 보상 설계 + 랜덤화 설계를 인간 개입 없이 자동으로 최적화할 수 있습니다 .
3. 실험 설계 및 결과 평가
DrEureka는 두 가지 대표 과제와 하나의 도전적 과제를 통해 검증되었습니다.
- 사족보행 전진 (Go1 로봇)
- 목표: 2 m/s 속도로 빠르게 전진.
- 비교: 인간 설계 보상+DR vs DrEureka 자동 설계.
- 결과: DrEureka 정책이 평균 속도 34%↑, 이동 거리 20%↑ 성능 향상 .
- 지형 일반화 평가(실내 바닥, 잔디, 보도블록, 양말 신긴 발)에서도 안정적 성능 유지 .
- Dexterous Manipulation (LEAP Hand, 큐브 돌리기)
- 목표: 손바닥 위 큐브를 최대한 많이 회전시키기.
- 결과: DrEureka 정책이 인간 설계 대비 약 3배 더 많은 회전 성공 .
- 정책의 안정성이 높아 실제 로봇에서도 일관된 성능을 보임 .
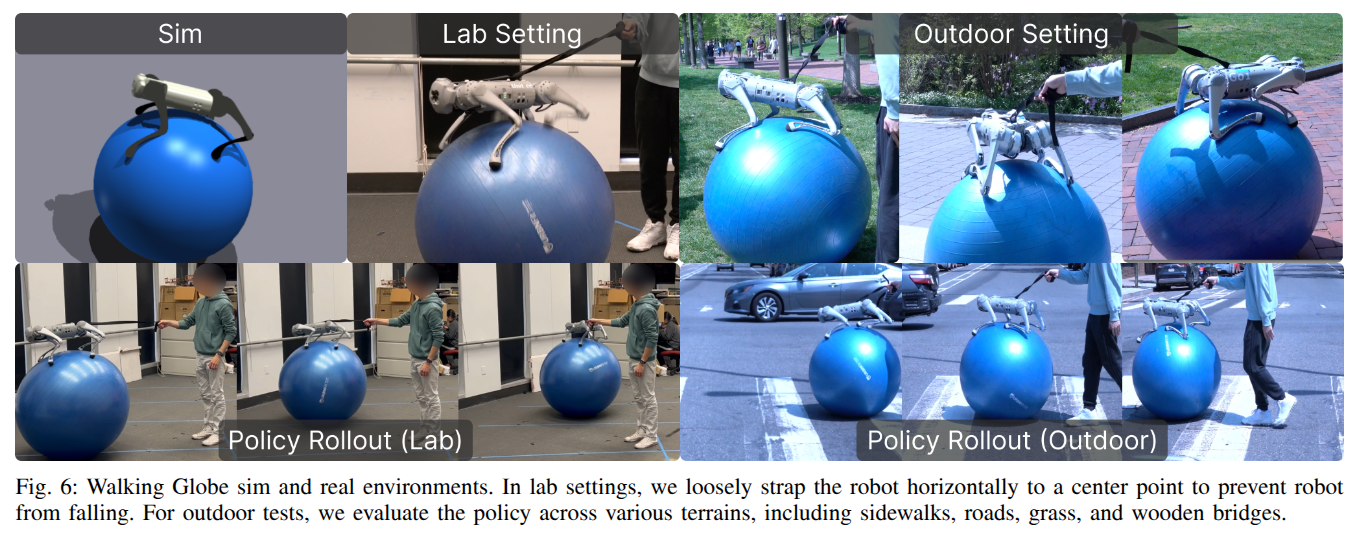
- 요가 공 위 걷기 (Ball Balancing)
- 완전히 새로운 과제: 큰 요가 공 위에서 균형 잡으며 전진.
- 결과: 시뮬레이션 학습 정책을 곧장 현실 적용, 수 분간 균형 유지하며 걷기 성공 .
- 교란(발로 공을 차거나 공의 공기압을 줄임)에도 로봇이 스스로 균형을 회복 .
이 실험들은 DrEureka가 다양한 환경에서 학습한 정책이 시뮬레이션을 넘어 현실에서도 강건하게 동작함을 보여주며, 기존의 수작업 기반 접근보다 뛰어난 성능과 일반화 능력을 입증했습니다 .
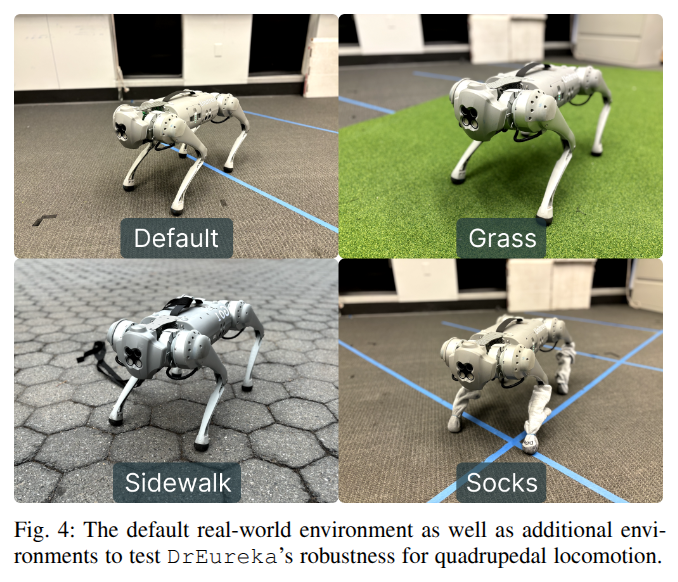
Unitree Go1이 다양한 실제 지면 위에서 DrEureka로 학습한 정책을 실행하는 모습. 기존 방법보다 안정성과 속도 모두 우수함을 보여줌 .
4. 기존 연구와의 차별점 및 기여
- LLM in Sim-to-Real 설계: 기존 LLM 기반 로봇 연구는 주로 자연어를 고수준 계획으로 변환하거나, 단순한 환경 샘플링 수준에 그쳤습니다 . DrEureka는 처음으로 보상 함수와 도메인 랜덤화까지 포함한 Sim-to-Real 설계 전체를 LLM이 주도할 수 있음을 보여주었습니다 .
- 인간 개입 최소화: 기존 커리큘럼 설계나 도메인 랜덤화 연구는 대부분 전문가가 파라미터 범위를 손으로 지정해야 했습니다 . DrEureka는 RAPP + LLM 조합으로 이를 자동화하여 효율성과 재현성을 동시에 확보했습니다 .
- 실세계 성능 검증: 많은 선행연구가 시뮬레이션에서만 결과를 보고한 것과 달리, DrEureka는 실제 로봇 실험을 통해 직접 성능을 입증했습니다 . 특히 요가 공 위 걷기와 같은 새로운 과제를 자동 설계하고 성공적으로 전이한 사례는 최초의 결과로 평가됩니다 .
- 물리 기반 LLM 활용: LLM이 물리적 상식(마찰, 중력, 관성 등)을 활용하여 파라미터 범위를 합리적으로 설정하고, 그 근거까지 설명할 수 있다는 점은 AI-로봇 공학 융합 연구에서 중요한 전환점입니다 .
5. 한계점 및 향후 연구 과제에 대한 비판적 고찰
DrEureka는 강력한 결과를 보여주었지만, 몇 가지 한계점이 존재합니다 .
현실 피드백 부족: 현재 DrEureka는 시뮬레이터만 사용하여 학습 후 현실에 곧장 이식하는 Zero-Shot Sim-to-Real을 목표로 합니다. 하지만 현실의 노이즈·마찰·센서 오차는 시뮬레이터에 완벽히 반영되지 않기 때문에, 일부 환경에서는 여전히 실패할 수 있습니다 . → 향후 과제: 현실 실행 데이터를 LLM 프롬프트로 되먹임하는 Sim-Real co-adaptation 루프 필요.
감각 통합 한계: 본 연구는 proprioception 기반 제어만 다루었고, 시각·촉각 정보를 사용하지 않았습니다 . → 향후 과제: 비전/멀티모달 정보까지 통합해 더 복잡한 환경과 상호작용하는 정책 학습으로 확장해야 함.
시뮬레이터 품질 의존성: DrEureka는 시뮬레이터의 물리 충실도가 낮으면 효과가 떨어질 수 있습니다 . → 향후 과제: 시뮬레이터 신뢰성 개선 또는 LLM이 시뮬레이터 한계 자체를 인지/보완할 수 있는 구조 필요.
LLM 비용 및 안정성: GPT-4와 같은 LLM 사용에는 비용(논문에서는 약 15달러/24시간)과 출력 품질 편차 문제가 있습니다 . → 향후 과제: 경량화된 LLM이나 프롬프트 최적화, 출력 검증 체계가 필요합니다.
결론
DrEureka는 LLM의 코드 생성 및 물리 상식 활용 능력을 Sim-to-Real 파이프라인에 접목하여, 보상 함수와 도메인 랜덤화 설계를 자동화하는 최초의 프레임워크를 제시했습니다. 이를 통해 사족보행, 로봇 손 조작, 요가 공 걷기와 같은 다양하고 난이도 높은 과제에서 실제 로봇 전이 성공을 입증했으며, 기존 전문가 설계 기반 접근보다 더 높은 성능과 일반화 능력을 보여주었습니다 .
물론 아직 현실 피드백의 부족, 시뮬레이터 의존성, LLM 사용 비용 등의 한계가 존재하지만, DrEureka는 로봇 제어 학습 자동화와 LLM 기반 물리 시뮬레이션 디자인의 가능성을 제시하며, 향후 로봇 연구의 패러다임 전환을 이끌 잠재력을 보여주고 있습니다.