📃GraspMPC 리뷰
- Grasp-MPC는 복잡한 환경에서 새로운 물체를 견고하게 파지하기 위해 가치 함수(value function) 기반의 모델 예측 제어(MPC)를 활용하는 폐쇄 루프 6-DoF 시각 파지 정책을 제안합니다.
- 이 가치 함수는 8천 개 이상의 Objaverse 객체에 대한 2백만 개 이상의 성공 및 실패 파지 궤적을 포함하는 대규모 합성 데이터셋으로 학습되어, 파지 성공 가능성을 예측하고 MPC 프레임워크 내에서 로봇을 안내합니다.
- Grasp-MPC는 시뮬레이션 및 실제 환경에서 기존 개방 루프(open-loop) 및 폐쇄 루프(closed-loop) 방식을 최대 33.3% 능가하며, 예측 오류와 물체 자세 변화에 대한 견고성과 다양한 환경에서의 일반화 능력을 입증했습니다.
1 Brief Review
Grasp-MPC는 복잡한 환경에서 새로운 객체를 견고하고 반응적으로 파악하기 위해 설계된 폐쇄 루프 6-DoF 비전 기반 그립 정책입니다. 이 논문은 모델 예측 제어(MPC)와 데이터에서 학습된 가치 함수를 결합하여 개방 루프 및 폐쇄 루프 그립 방식의 장점을 통합합니다.
핵심 방법론:
- 대규모 합성 데이터셋 생성 (Data Generation):
- 8,515개의 Objaverse 객체를 사용하여 시뮬레이션 환경에서 2백만 개 이상의 그립 궤적(trajectory) 데이터셋을 생성합니다.
- 궤적은 상용 그립 예측 모델에서 얻은 noisy한 pre-grasp 자세부터 ground-truth grasp 자세까지 모션 플래닝(CuRobo 사용)을 통해 생성됩니다.
- Pre-grasp 자세는 annotated grasp 자세에서 15cm의 고정 오프셋을 적용하고, U(-0.04cm, 0.04cm)의 병진 노이즈와 U(-0.04\pi, 0.04\pi)의 회전 노이즈를 추가하여 다양성을 확보합니다.
- 생성된 궤적 중 물리적으로 그립 가능한 경우는 성공(successful)으로, 그 외는 실패(failed)로 레이블링되어 가치 함수 학습에 활용됩니다. 이 데이터셋은 총 1억 1,500만 개의 상태를 포함하며, 성공 궤적은 70.2%를 차지합니다.
- 가치 함수 학습 (Value Function Training):
- 가치 함수 V(x_t)는 주어진 상태에서 예상되는 잔여 비용(cost-to-go)을 근사하도록 학습됩니다. 여기서 상태 x는 분할된 객체 포인트 클라우드(segmented object point cloud)와 포인트 클라우드 중심에 대한 end-effector의 상대적인 포즈 T_{\text{obj}}^{\text{EE}}를 포함합니다. 포인트 클라우드는 입력을 표준화하기 위해 중심화됩니다.
- 학습은 Bellman 에러 목적 함수를 사용하여 수행됩니다. 비용 c_t는 그립 목표 자세에 도달하고 물리적으로 가능한 경우 0으로, 그 외에는 1로 정의되는 sparse cost label입니다. c_t = \begin{cases} 0 & \text{if } |q_{\text{goal},i} - q_{t,i}| \le 5e^{-3}, \forall i, \text{ and } \mathbf{1}_{\text{feasible}} = 1 \\ 1 & \text{Otherwise} \end{cases} 여기서 q_{t,i}는 시간 t에서의 i-번째 joint position, q_{\text{goal},i}는 목표 joint position, \mathbf{1}_{\text{feasible}}은 궤적이 가능한 그립에 해당하는지 여부를 나타냅니다.
- 가치 함수는 다음 식을 최소화하도록 학습됩니다: \ell(\phi; x_t, c, x_{t+1}) = y_t - V_{\phi}(x_t)^2 여기서 y_t = c_t + \gamma V_{\phi'}(x_{t+1})는 1-step target이며, \gamma = 0.99는 할인율(discount factor)입니다.
- 가치 함수 네트워크는 PointNet++ 인코더(포인트 클라우드 처리)와 MLP(고유수용성, end-effector 포즈 처리)로 구성되며, 이들의 출력을 연결하여 최종 MLP 헤드로 값을 예측합니다. softplus 활성화 함수를 사용하여 항상 양의 값을 예측하도록 합니다.
- MPC 내 가치 함수 통합 (Integrating a Value Function as a Grasp Cost within MPC):
- 학습된 가치 함수는 MPC의 비용 함수로 통합되어 온라인 배포 시 그립 비용을 최소화하도록 로봇을 안내합니다.
- MPC의 그립 비용은 예측 궤적의 각 상태에 대한 가치 함수의 할인된 합으로 정의됩니다: C_{\text{grasp}}(x_{h \in H}) = \sum_{t'=t}^{t+H} \gamma^{t'-t} V_{\theta}(x_{t'})
- 최종 MPC 목적 함수는 CuRobo의 기본 비용(최소 jerk, 충돌 회피 등)에 가치 기반 그립 비용을 더한 것입니다: C_{\text{Grasp-MPC}} = C_{\text{curobo}} + \omega C_{\text{grasp}} 여기서 C_{\text{curobo}}는 CuRobo의 기본 비용(world collision, self-collision, bounds cost), \omega = 1000은 가치 함수 비용의 가중치입니다.
- MPC는 GPU 가속 프레임워크인 CuRobo에 구현된 Model Predictive Path Integral (MPPI) 옵티마이저를 사용합니다.
배포 (Deployment):
Grasp-MPC는 상용 그립 예측 모델(M2T2) 및 모션 플래너와 결합하여 작동합니다. 로봇은 먼저 모션 플래너를 사용하여 pre-grasp 자세로 이동한 다음, Grasp-MPC를 통해 객체를 파악합니다. 이 과정에서 로봇 상태, 분할된 객체 포인트 클라우드, 그리고 환경의 Signed Distance Field(SDF, NVBlox로 표현) 피드백을 활용하여 충돌을 피하면서 그립 작업을 수행합니다.
실험 결과:
시뮬레이션(FetchBench) 및 실제 환경에서 광범위한 평가를 통해 Grasp-MPC는 개방 루프, Diffusion Policy, Transformer Policy, IQL과 같은 최첨단 방법론보다 우수한 성능을 보여줍니다. 특히, 시뮬레이션에서 최대 32.6%, 실제 환경의 노이즈가 많은 조건에서 최대 33.3%의 그립 성공률 향상을 달성했습니다. Grasp-MPC는 noisy한 그립 자세나 동적인 객체 교란에도 견고하게 작동하며, 학습 데이터셋이 빈 장면에서만 생성되었음에도 불구하고 복잡한 실제 환경(테이블 위, 선반 위 혼잡한 장면)에서 효과적인 그립 능력을 입증했습니다.
2 Detail Review
Grasp-MPC 논문 심층 리뷰 분석
2.1 1. 논문의 주요 기여 및 기술적 혁신 분석
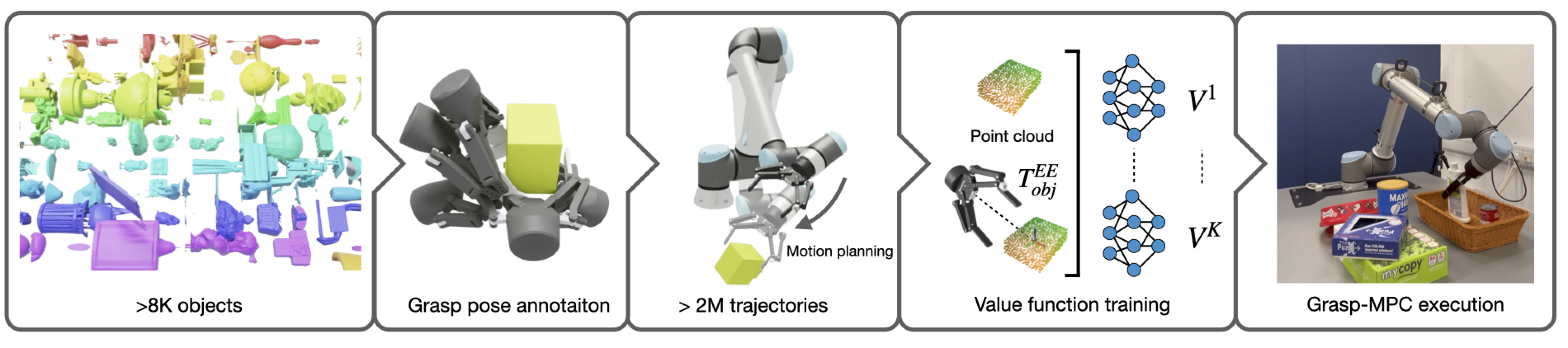
Grasp-MPC 프레임워크 개요: 다양한 객체 데이터셋(Objaverse의 8천여 개 객체)으로부터 파지(그립) 자세를 생성하고, 모션 플래닝을 통해 200만 개 이상의 파지 궤적 데이터를 시뮬레이션에서 수집한다. 이 궤적 데이터에는 성공한 시도와 실패한 시도가 모두 포함되며, 이를 활용해 포인트 클라우드 관측 기반의 가치 함수(value function)를 학습한다. 학습된 가치 함수는 파지 성공 확률을 예측하며 MPC의 비용 함수로 활용되어, 충돌 회피 등의 제약 조건 하에 로봇의 파지 동작을 실시간 생성한다. 오른쪽 그림은 Grasp-MPC를 사용하여 복잡한 환경의 새로운 물체를 안전하게 파지하는 UR10 로봇의 예시를 보여준다.
Grasp-MPC는 복잡한 환경에서 새로운 물체들을 다룰 수 있는 폐루프(closed-loop) 6-자유도 비전 기반 파지 기법으로, 기존 접근법들의 한계를 극복하기 위해 제안되었다. 이 방법은 open-loop 방식(사전에 예측된 파지 자세로 이동)과 closed-loop 제어(실시간 피드백을 통한 조정)의 강점을 결합한 것이 핵심이다. 구체적으로, Grasp-MPC는 최신 그립 포즈 예측 모델을 이용해 로봇을 대략적인 pre-grasp 자세까지 먼저 이동시킨 후, 그 지점부터 모델 예측 제어(MPC)를 사용하여 폐루프 방식으로 파지를 완료한다. 이를 통해 기존 open-loop 기법이 겪는 그립 위치 예측 오차나 물체 위치 변화에 실시간으로 대응할 수 있으며, 로봇이 목표를 동적으로 조정하면서 파지를 성공시킬 수 있게 된다.
Grasp-MPC의 가장 큰 기술적 혁신은 MPC의 비용 함수로 학습된 가치 함수를 도입한 점이다. 전통적인 방법에서는 예측된 파지 자세까지의 거리 등의 기하학적 비용함수를 사용했지만, 이는 오차에 취약하고 MPC의 폐루프 잠재력을 충분히 활용하지 못했다. 반면 Grasp-MPC에서는 시뮬레이션을 통해 대규모로 수집된 파지 궤적 데이터(성공과 실패 사례 모두 포함)로부터 비전 기반 가치 함수를 학습하고 이를 과제 비용(task cost)으로 사용한다. 이 가치 함수는 주어진 물체의 포인트 클라우드와 로봇 말단Effector 자세를 입력으로 파지 성공 가능성을 예측하며, MPC 내부에서 과제 성공도를 나타내는 비용 항으로 작용한다. 결과적으로 로봇은 이 비용을 최소화하는 방향으로 상태 공간을 탐색하면서 파지 행동을 생성하게 되며, 이는 곧 파지 성공 확률을 최대화하도록 유도한다. 추가적으로, MPC의 최적화 과정에는 충돌 회피(collision avoidance)와 동작의 부드러움(minimum jerk)을 위한 비용 항도 포함되어 있어 복잡한 환경에서 안전한 파지 경로를 생성할 수 있다. 이러한 학습된 가치 함수 기반 폐루프 제어는 동적이고 협소한 공간에서도 파지를 안정적이고 신뢰성 있게 수행할 수 있게 해주는 본 논문의 핵심 기술적 기여이다.
논문에서 저자들이 강조한 Grasp-MPC의 주요 기여는 다음과 같이 정리된다:
안전한 폐루프 비전 기반 파지 정책 제안: Grasp-MPC는 복잡한(cluttered) 환경에서 새로운 물체들을 다룰 수 있는 안전한 폐루프 시각 파지 정책을 제시한다. 즉, 실시간 센서 피드백을 통해 동적으로 조정하면서도, 충돌을 피하고 안정적으로 물체를 잡을 수 있는 정책이다.
모델 기반 제어와 데이터 기반 학습의 통합: Grasp-MPC는 모델 기반 제어 (MPC)와 데이터 기반 접근을 통합하여, 학습된 그립 가치 함수를 MPC 프레임워크에 결합한 새로운 구조를 구현했다. 이를 통해 반응적이고 제약을 준수하는(grasping with reactive, constraint-aware) 파지 실행이 가능해졌으며, 동적인 환경에서도 실시간 적응이 가능하다.
대규모 합성 파지 궤적 데이터셋 구축: 저자들은 대규모 시뮬레이션 파지 궤적 데이터셋을 구축하였는데, 수백만 건(M=2,000,000+)의 파지 경로와 상태, 그리고 수천 개에 이르는 다양한 객체를 포함한다. 이렇게 방대한 Objaverse 객체를 활용한 데이터셋은 일반화 가능한 가치 함수를 학습하는 데 기여하였으며, 이전 방법들보다 훨씬 다양한 시나리오를 포괄한다.
폭넓은 실험을 통한 성능 검증: 시뮬레이션(FetchBench 벤치마크)과 실제 로봇 실험 모두에서 광범위한 평가를 수행한 결과, Grasp-MPC는 기존 최신 open-loop 및 closed-loop 방법들을 의미 있게 능가하는 성능 향상을 보여주었다. 특히 시뮬레이션 환경에서 최대 32.6%, 실제 복잡한 환경에서 33.3%까지 파지 성공률을 개선하여, diffusion 정책, Transformer 기반 정책, IQL 등 다양한 기존 접근법 대비 두 자릿수 이상의 향상을 달성하였다. 이러한 결과는 본 기법의 실용성과 일반화 성능을 잘 뒷받침해준다.
요약하면, Grasp-MPC는 대규모 학습된 가치 함수를 MPC 제어 루프에 통합함으로써, 이전의 파지 방법들이 지니던 실시간 피드백 부족 문제, 일반화 한계, 안전성 문제를 모두 아우르는 새로운 솔루션을 제공한 것이다. 이러한 기술적 혁신은 향후 복잡한 로봇 조작 분야에서 피드백 기반의 안전한 제어와 데이터 활용을 접목시키는 데에 중요한 방향을 제시한다.
2.2 2. 실험 설정 및 결과 평가
논문에서는 시뮬레이션과 실제 로봇 환경에서 Grasp-MPC의 성능을 평가하여 그 유효성과 우수성을 입증했다. 실험은 다음과 같은 핵심 질문들을 중심으로 설계되었다:
- Ground Truth 파지 자세가 주어졌을 때, Grasp-MPC는 새로운 물체를 얼마나 잘 파지하는가? (이론적으로 최적의 파지 위치가 주어진 경우 성능 평가)
- 파지 자세에 오차/노이즈가 있는 경우(예: 예측 오류로 인한 위치 편차), Grasp-MPC는 얼마나 견고하게 파지를 수행하는가?
- 학습된 그립 포즈 예측 모델을 사용하여 파지할 때(즉, 실제로는 이상적인 파지 자세가 아닌 예측된 목표로 파지 시도), Grasp-MPC의 성능은 어떠한가?
시뮬레이션 환경 설정: 저자들은 시뮬레이션 평가를 위해 FetchBench라는 표준 환경을 활용하였고, 로봇으로 UR10 팔과 Robotiq 2F-140 그리퍼를 사용했다. 평가 장면은 다양한 복잡한(cluttered) 환경으로 구성되었으며, 실험에 사용된 물체들은 모두 새로운 객체(학습 시 사용되지 않은 객체)로 채워졌다. 3개의 카메라로부터 포인트 클라우드를 수집하여 정책에 입력으로 사용하였고, 각 실험 장면마다 여러 가지 파지 시나리오를 구성하여 총 수천 회 이상의 시험을 진행했다. 성능 평가 척도로는 파지 성공률을 사용했는데, 이는 로봇이 물체를 집은 후 일정 높이 이상 들어올리는지로 정의된다. (모션 플래닝으로 pre-grasp 지점까지 이동하는 과정에서 실패한 경우는 파지 시도가 이루어지지 않았으므로 별도로 제외하여 성공률을 계산).
비교 방법(베이스라인): Grasp-MPC의 성능을 검증하기 위해 여러 기존 방법들과 비교 실험을 수행했다. Open-loop 접근의 대표로는 OSC(Operational Space Control) 기반 직선 이동 파지 방법을 사용하여, 이는 FetchBench에서도 oracle에 가까운 baseline으로 쓰이는 방식이다. 또한 모방학습 기반 폐루프 정책인 Transformer Policy도 포함되었는데, 이는 FetchBench 벤치마크에 사용된 Transformer 아키텍처의 정책이다. 더불어, Diffusion Policy (확산 정책) 방식의 폐루프 IL 정책도 평가에 포함되었다 – 이 방법은 포인트 클라우드를 입력으로 사용하는 최신 상태의 모방학습 기반 파지 정책 중 하나이다. 마지막으로, 오프라인 강화학습 기반의 정책인 IQL (Implicit Q-Learning)을 비교에 포함시켰다. 모든 방법들은 Grasp-MPC와 동일하게 사전에 모션 플래너(CuRobo)를 이용해 로봇을 지정된 pre-grasp 위치까지 움직인 뒤, 그 지점부터 각자의 방법으로 파지를 수행하도록 설정되었다. (참고로 IL 기반 정책들은 학습 시 성공한 파지 사례만으로 훈련되었다고 명시되어 있다.)
시뮬레이션 실험 결과: 우선 이상적인 파지 자세(ground-truth annotation)가 주어지는 실험에서, Grasp-MPC는 사전계획(open-loop) 기반의 Oracle 성능에 근접하는 높은 성공률을 보였다. 구체적으로, Grasp-MPC의 파지 성공률은 약 73.6%에 달해, oracle에 해당하는 open-loop 방식(OSC)의 성능과 거의 유사한 수준을 달성했다. 더욱이 Grasp-MPC는 다른 폐루프 기반 방법들보다 현저히 높은 성공률을 기록했는데, 예를 들어 IQL의 경우 Grasp-MPC보다 훨씬 낮은 성공률(약 60%대)에 그쳤다. Transformer 기반 IL 정책과 Diffusion 정책 역시 Grasp-MPC보다 성능이 떨어졌으며, 이는 모션 플래닝으로 수집된 제한적인 시演 데이터로 학습한 데 따른 한계와, 훈련 환경과 평가 환경 간의 차이(domain mismatch)로 인한 성능 저하 때문이라고 분석된다. (IL 모델들은 주로 빈 테이블 환경에서 데이터 수집이 이루어졌는데, 정작 평가 시에는 물체가 많은 복잡한 환경이라 MDP 불일치가 발생했고, 이로 인해 일반화 성능이 낮았다는 설명이다.)
다음으로 파지 자세에 노이즈가 추가된 실험(두 번째 질문)에서는 Grasp-MPC의 강인함(robustness)이 두드러졌다. Ground truth 파지 위치에 무작위 위치 오차(수 센티미터 변위와 회전 노이즈)를 섞어서 실행한 경우, open-loop 방식(OSC)은 성능이 약 40%p 급락하여 제대로 파지에 실패하는 반면, Grasp-MPC는 약 14%p 정도의 경미한 성능 감소만을 보이며 대부분의 시나리오에서 여전히 성공적으로 물체를 잡아냈다. 이는 폐루프 제어를 통해 피드백을 활용한 Grasp-MPC가 초기 목표 위치의 부정확함을 실시간 보정하며 대응하는 반면, open-loop은 한번 계획된 경로를 수정하지 못해 실패하기 때문이다. Grasp-MPC는 이 경우에도 다른 폐루프 baselines들보다 높은 성공률을 유지하여, 오프라인 RL이나 IL 기반 정책들보다 오차에 대한 내성이 높음을 보여주었다.
세 번째로, 학습된 그립 포즈 예측 모델을 실제로 활용하는 시나리오에서도 Grasp-MPC의 성능 우수성이 입증되었다. 저자들은 M2T2라는 최신 grasp pose 예측 모델을 사용하여 물체의 파지 목표 자세를 예측하고, 이를 각 방법들의 입력으로 사용했다. 예측된 파지 자세에는 필연적으로 오차와 노이즈가 존재하기 때문에, 이 설정은 실제 로봇 적용에 가까운 시나리오다. 그 결과 IL 기반 방법들은 성공률 36.5% 수준에 그쳐 거의 파지에 실패하였고, open-loop 방식(OSC)은 약 63.6%의 성공률을 보였다 (이 값은 ground truth 사용 시보다 약 15%p 감소한 수치이다). 반면 Grasp-MPC는 67.2%의 성공률로 가장 좋은 성능을 기록했으며, ground truth 대비 성능 감소폭도 불과 8%p에 그쳐 예측 오차에 대한 견고함을 뚜렷이 보여주었다. 즉, 학습된 그립 예측 모델의 출력이 완벽하지 않음에도 불구하고, Grasp-MPC는 폐루프 보정과 가치 함수 기반의 안정적인 제어를 통해 최고의 파지 성공률을 달성한 것이다. 이러한 결과는 Grasp-MPC가 실제 로봇 현장에 투입될 경우를 고려할 때, 예측 모델의 불확실성에 강인한 솔루션임을 시사한다.
실세계(real-world) 실험 설정: 시뮬레이션에서 유의미한 성능을 보인 Grasp-MPC를 실제 로봇 환경에서도 검증하였다. 실제 실험에는 UR10 로봇 팔과 Robotiq 2F-140 그리퍼를 사용했고, 이질적인 3가지 환경에서 평가가 이뤄졌다: (1) 물체가 거의 없는 빈 테이블 위, (2) 여러 새로운 물체들이 놓인 복잡한 테이블 위(cluttered tabletop), (3) 물체들이 선반에 놓인 복잡한 선반 환경(shelf clutter). 각 환경마다 서로 다른 객체 세트를 배치하여 다양성을 높였고, 각 물체에 대해 세 가지 서로 다른 초기 자세를 설정하여 반복 시험했다. 환경별로 수십 회 이상의 파지 시도를 통해 일관성과 신뢰성을 평가하였다. 로봇의 시각 센서는 RealSense L515 깊이 카메라 2대를 사용하여 실시간 포인트 클라우드를 생성했고, 목표 물체는 SAM-Track 기법으로 분리(segment)하여 인식했다. (SAM-Track은 Grounding DINO를 통한 객체 검출과 SAM(Segment Anything)으로 분할을 결합한 방법으로, 목표 물체의 포인트 클라우드를 추출해준다.) 또 주변 장애물을 다루기 위해 NVBlox를 이용해 환경의 장애물 맵을 생성하고, 이를 모션 플래닝과 MPC 모듈에서 고려하도록 설정하여 충돌을 사전에 회피하도록 했다. 파지 성공 기준은 시뮬레이션과 유사하게 물체를 집어 올린 뒤 로봇의 홈 포지션까지 이동시키면서 한 번도 떨어뜨리지 않는 것으로 정의되었다.
실세계 비교 및 안전성: 실제 환경에서는 폐루프 정책들의 안전성 문제가 있기 때문에, 비교 대상으로는 오픈 루프 기반의 CuRobo-GraspAPI 방법만을 사용했다. 이 방법은 모션 플래닝으로 지정된 파지 자세까지 이동한 후 그대로 집는 기존의 open-loop 파지 파이프라인으로, 현실에서 비교적 안전하고 신뢰할 만한 기준으로 간주된다. 반면 앞서 시뮬레이션에 포함됐던 다른 폐루프 방식들(IL 기반 정책들 등)은 충돌 회피 메커니즘이 없어 안전 문제가 예상되므로 실제 로봇에는 적용하지 않았다. (예를 들어 선반이나 테이블에 로봇팔이 부딪칠 위험이 있어 제외했다는 설명이다.) 이에 비해 Grasp-MPC는 MPC 최적화 자체에 충돌 회피 비용을 포함하고 있어 주변 장애물이 있는 상황에서도 안전하게 동작할 수 있기 때문에, 실제 로봇 실험에 적합하다는 점도 강조되었다.
실세계 실험 결과: 빈 테이블부터 복잡한 선반까지 점진적으로 난이도가 증가하는 3가지 환경 모두에서 Grasp-MPC는 일관되게 open-loop 기준보다 높은 파지 성공률을 거두었다. 구체적으로 Figure 8의 결과에 따르면, 어느 환경에서든 Grasp-MPC가 CuRobo(open-loop) 방법보다 성공률이 높았으며 복잡한 환경일수록 그 격차가 커졌다고 보고된다. Open-loop 방식은 예측된 파지 자세가 이상적 위치에서 조금만 벗어나도 실행 중 경로를 수정하지 못해 파지에 실패하는 사례가 잦았지만, Grasp-MPC는 실행 도중 지속적으로 그리퍼의 자세를 조정하면서 가치 함수 상의 비용을 최소화하도록 동작하기 때문에, 장애물(예: 선반 가장자리 등)을 피하면서도 최종적으로 물체를 잡는 비율이 훨씬 높았다. 요약하면, 정적인 물체 파지 작업에서 조차도 Grasp-MPC가 open-loop 대비 뛰어난 적응력을 보여준 것이다. 실제 예시로, Grasp-MPC는 선반 구석에 있거나 여러 물체 사이에 낀 목표 물체를 집을 때도 중간에 그립 자세를 미세 조정하여 성공적으로 파지하는 모습을 보였는데, 이러한 능력은 기존 개방형 제어로는 불가능한 부분이다.
한편, 동적인 변화에 대한 적응 실험도 진행되었다. 이는 실제 로봇 환경에서 폐루프 제어의 장점을 극대화하는 시나리오로서, 로봇이 목표 파지 지점(pre-grasp)에 도달한 후에 의도적으로 물체의 위치를 이동(교란)시켜 보는 테스트이다. 이러한 돌발 상황은 일반적인 open-loop 접근으로는 대응이 불가능하므로, 해당 실험은 Grasp-MPC 단독으로 수행되었다. 실험에서는 여러 물체에 대해 각각 수 차례씩 큰 폭의 위치 교란을 주었는데, Grasp-MPC는 물체가 갑자기 움직여도 즉각적으로 경로를 보정하여 끝내 파지에 성공하는 높은 적응력을 보여주었다. 심지어 학습된 가치 함수는 주로 5cm 이내의 비교적 작은 움직임만 경험했음에도, 그 이상의 큰 물체 이동에도 전역적으로 파지를 재계획하여 상당한 성공률을 달성했다는 점이 고무적이다. (정량적인 성공률 수치가 제시되지는 않았지만, 실행 예시를 통해 Grasp-MPC가 실시간으로 움직이는 표적을 추적하여 잡는 모습이 확인되었다고 한다.) 이는 Grasp-MPC의 폐루프 제어가 가지는 실시간 적응성을 잘 보여주는 대목으로, 실제 응용에서 물체가 떨어지거나 움직일 때도 회복(graceful recovery) 가능한 파지 시스템의 가능성을 시사한다.
결론적으로, 실험 결과들은 시뮬레이션에서나 실제에서나 Grasp-MPC의 우수한 성능과 견고함을 입증한다. Grasp-MPC는 대규모 데이터로 학습된 가치 함수 덕분에 새로운 물체에 대한 일반화 능력이 뛰어나고, MPC 기반 피드백 제어를 통해 환경 변화나 예측 오차에도 흔들리지 않는 파지 성공률을 보여주었다. 특히 복잡한 실제 환경 (테이블, 선반 등)에서도 추가 학습 없이 곧바로 높은 성공률을 낸 점은, 이 접근법의 실용적 가치를 뒷받침하는 중요한 성과라 할 수 있다. Grasp-MPC는 센서 노이즈, 물리적 접촉 등의 현실 요인을 잘 견디며, 이는 물리 기반 시뮬레이션 데이터에 의존하지 않고도 달성된 것이라 더욱 주목된다.
2.3 3. 기존 연구와의 비교 분석
로봇 파지(grasping) 분야의 기존 연구들은 크게 open-loop 방식과 closed-loop 방식으로 양분된다. Open-loop 파지 기법들은 딥러닝으로 그립 포즈(파지 자세)를 예측한 후, 로봇팔을 해당 위치로 모션 플래닝해 이동시켜 파지하는 접근법을 사용해왔다. 대표적으로 물체의 3D 데이터베이스를 활용한 대규모 학습(예: Dex-Net 등)이나, 시뮬레이터에서 생성한 파지 annotation 데이터를 통한 학습 방법들이 이에 속한다. 이러한 open-loop 방법들은 비교적 새로운 물체에 대한 파지 성공률이 높게 보고되었으나, 실시간 피드백 부족으로 인해 한 번 계획이 시작되면 경로를 유연하게 수정하지 못한다는 한계가 있다. 그 결과, 그립 포즈 예측 오류나 실행 중 물체의 움직임 변화에 매우 취약하며, 복잡한 환경에서 물체가 서로 상호작용하거나 예측과 다른 위치에 있을 때 실패율이 높아지는 문제가 있었다.
폐루프(closed-loop) 파지 기법들은 이러한 문제를 극복하고자 실시간 센서 피드백을 제어에 도입한 방법들이다. 강화학습(RL) 기반 접근과 모방학습(IL) 기반 정책학습이 이에 해당하며, 로봇이 카메라 등으로부터 주기적으로 관측을 받아 매 시점 행동을 결정하는 정책(policy)을 학습한다. 이러한 폐루프 방법들은 오픈 루프에 비해 피드백으로 오차를 수정할 수 있어 성공률 향상의 여지가 있지만, 현실적으로 학습을 위한 데이터 수집이 어렵고 비싼 문제가 있다. 많은 기존 연구들이 단순한 테이블 위 단일 물체 환경에서만 학습/평가되었고, 주어진 제한된 데이터로 학습된 정책은 새로운 물체나 복잡한 장면으로 일반화하기 어려웠다. 특히 다양한 물체에 대한 대규모 파지 데이터셋 부족이 병목이 되어, 폐루프 정책들의 성능은 제한적이었다. 또한 학습된 정책이 충돌 회피와 같은 안전성을 내재적으로 보장하지 못해, 복잡한 환경에 로봇을 투입하기에는 위험 요소가 많았다. 예컨대, 기존의 여러 RL/IL 기반 파지 논문들은 로봇과 주변 물체 간 충돌을 고려하지 않아서 실제 응용시 안전 문제가 지적되어 왔다.
이 논문의 Grasp-MPC 접근법은 기존 대비 몇 가지 중요한 차별점을 지닌다. 우선, Open-loop와 Closed-loop의 장점 결합이라는 관점에서, Grasp-MPC는 사전 학습된 그립 예측 모델과 모션 플래닝을 사용해 초기 파지 자세까지 접근하는 모델 기반 단계를 활용하면서도, 최종 파지 동작은 MPC 폐루프 제어로 수행함으로써 두 접근법의 이점을 모두 취했다. 이처럼 모델 기반 + 데이터 기반을 통합한 설계는 기존에 없던 새로운 틀로, open-loop 방식의 빠른 초기 경로 설정 능력과 closed-loop 방식의 실시간 적응 능력을 결합한 것이다. 특히 MPC를 정책 실행기로 사용한 점이 독특한데, 일반적인 RL과 달리 정책 네트워크를 명시적으로 학습하지 않고 가치 함수만으로도 MPC가 최적 행위를 찾아낼 수 있도록 했다. 이는 오프라인 RL의 철학과도 맞닿아 있는데, 기존 오프라인 RL 기법들은 대용량의 오프라인 데이터를 활용하면서도 학습된 Q함수나 가치함수로부터 정책을 추출하는 과정에서 어려움이 있었다. Grasp-MPC는 애초에 MPC가 곧 정책이므로 이러한 추출 과정이 불필요하며, 값 함수 학습 자체에 집중할 수 있었다. 이러한 구조 덕분에 IQL과 같은 오프라인 RL 방법에 비해 학습된 가치 함수를 효율적으로 활용하여 더 높은 성능을 발휘한 것으로 보인다.
또한 비용 함수 설계의 측면에서, Grasp-MPC는 학습 기반의 비용 함수(가치 함수)를 도입하여 기존 방법들의 단점을 극복했다. 앞서 언급한 바와 같이, 기존에 Chen 등의 연구에서는 예측된 그립 포즈와의 거리를 기반으로 하는 값 함수를 MPC의 cost로 사용하려 했으나, 이러한 단순 거리 기반 척도는 파지 성공에 중요한 여러 요인(예: 손가락과 물체의 구체적인 접촉 관계나 물체의 무게 중심 등)을 반영하지 못해 결과적으로 최적이 아닌 동작을 유도하는 문제가 있었다. 또한 다른 시도 중 하나인 CV-MPC에서는 소량의 데모만으로 가치 함수 앙상블을 학습하였는데, 이는 저차원 상태(예: 로봇 joint 값 등)만 사용하여 학습하였기 때문에 시각적 다양성이나 새로운 상황에 적응하기 어려웠다. 반면 Grasp-MPC의 경우 고차원 시각정보(포인트 클라우드)와 수백만 건의 다양한 시뮬레이션 궤적으로부터 학습한 가치 함수를 사용함으로써, 파지 성공에 영향을 주는 미세한 요소들까지 비용에 반영할 수 있었고 결과적으로 일반화 성능과 성공률 모두 향상시켰다. 이는 Grasp-MPC가 MPC를 활용한 폐루프 제어 분야에서 처음으로 대규모 비전 기반 학습을 결합한 사례로 평가할 수 있다.
데이터셋 규모와 일반화 측면에서도 Grasp-MPC는 기존 연구보다 앞선다. FetchBench 등 이전 연구들에서는 파지 데이터의 양과 다양성의 한계로 인해 성능이 제약되었는데, Grasp-MPC는 Objaverse 기반으로 훨씬 큰 규모의 합성 데이터를 생성하여 학습함으로써 이러한 한계를 돌파했다. 특히 FetchBench에서 사용된 Transformer IL 정책의 경우 제한된 시연 데이터로 학습돼 복잡한 장애물 환경에서는 성능이 떨어졌으나, Grasp-MPC는 더 대규모·다양한 데이터로 학습된 덕분에 이질적인 환경에서도 견고한 성능을 보였다. 실제 실험에서 Grasp-MPC가 학습 때는 빈 환경만 경험했음에도 불구하고, 복잡한 테이블이나 선반 환경에서 별도 튜닝 없이 높은 성공률을 낸 점은 이러한 일반화 능력 향상을 잘 보여준다.
안전성과 시스템 통합 관점에서 보더라도, Grasp-MPC는 실용적인 우위를 갖는다. 기존의 폐루프 학습 정책들은 주로 충돌 회피나 안전 제약을 고려하지 않고 학습되었기 때문에, 실제 환경에서 로봇이 장애물과 충돌할 위험이 있었다. 하지만 Grasp-MPC는 MPC 최적화 문제에 안전을 위한 제약(충돌 회피, 최소 jerk 등)을 명시적으로 포함시켰기 때문에, 협소한 공간이나 장애물이 많은 상황에서도 안정적으로 동작할 수 있었다. 이는 본 논문 실험에서도 입증되어, 다른 폐루프 방법들은 현실 환경에서 위험해 적용하지 못한 데 비해 Grasp-MPC는 선반 같은 복잡한 환경에서도 무사고로 임무를 수행했다. 나아가 이러한 모듈식 설계 덕분에, Grasp-MPC는 새로운 제약 조건이나 환경 변화에 유연하게 대응할 수 있다. 예를 들어 로봇의 작업 공간에 특정 금지 영역이나 동역학적 제한이 추가되더라도, MPC 문제에 해당 비용이나 제약을 넣으면 재학습 없이도 시스템에 반영될 수 있다. 이는 학습된 정책을 바꾸지 않고도 제어 단계에서 해결할 수 있기 때문에 실제 응용에서의 편의성을 높여준다.
마지막으로, 성능 측면에서의 비교를 요약하면 다음과 같다. Grasp-MPC는 시뮬레이션 상에서 5,400여 개의 다양한 파지 시나리오를 실험한 결과, 모방학습(IL) 기반 방법들을 크게 앞서는 성공률을 보였고, 기존 계획 기반 방법(planning-based)이 예측 오차나 센서 노이즈로 성능이 떨어지는 상황에서도 우수한 결과를 냈다. 오프라인 RL인 IQL과 비교해서도, IQL이 정책 추출의 비효율로 성능이 제한된 반면 Grasp-MPC는 더 높은 성공률로 그 격차를 보여주었다. 실제 로봇 실험에서도, 기존의 계획 기반 파지 파이프라인 대비 Grasp-MPC가 복잡한 테이블 및 선반 환경에서 더 높은 성공률을 기록했으며, 이는 학습 당시 접하지 않은 환경에서도 통하는 일반화 능력을 입증한 것이다. 요컨대 Grasp-MPC는 현 시점에서 개방형·폐루프 파지 접근법들 모두를 뛰어넘는 새로운 state-of-the-art 성능을 달성한 것으로 평가된다.
한편, 저자들은 이러한 공헌에도 불구하고 남아있는 한계점도 언급한다. 예를 들어 절대적인 성공률을 더 높이기 위해서는 향후 물리 시뮬레이션을 통한 더 정확한 성공/실패 레이블링이나, 현실 데이터로의 파인튜닝 등이 유효할 수 있다고 제안한다. 또한 현재 Grasp-MPC의 검증은 파지(grasping) 작업에 국한되어 있는데, 유사한 접근을 다른 조작(manipulation) 작업 (예: 도구 사용이나 비전 기반 위치 미세조정 등)에도 확장할 수 있을 것으로 기대하며, 이는 추후 연구과제로 남겨두었다고 밝혔다. 그럼에도 불구하고, Grasp-MPC는 기존 연구 대비 데이터 규모, 알고리즘 구조, 실험 검증 면에서 새로운 기준을 세운 연구로서 의의가 크다. 이는 로봇 파지 및 일반적인 로봇 제어 커뮤니티에서 모델 예측 제어와 딥러닝 가치 함수의 융합 가능성을 보여준 사례이며, 향후 더욱 복잡한 조작 임무에 폐루프 학습기반 제어를 적용하는 데에 밑거름이 될 것으로 전망된다.