📃Generative Predictive Control 리뷰
- 전문가 데모 없이 시뮬레이션으로 학습 가능한 동적 작업을 위한 새로운 생성형 예측 제어(Generative Predictive Control, GPC) 프레임워크를 제안합니다.
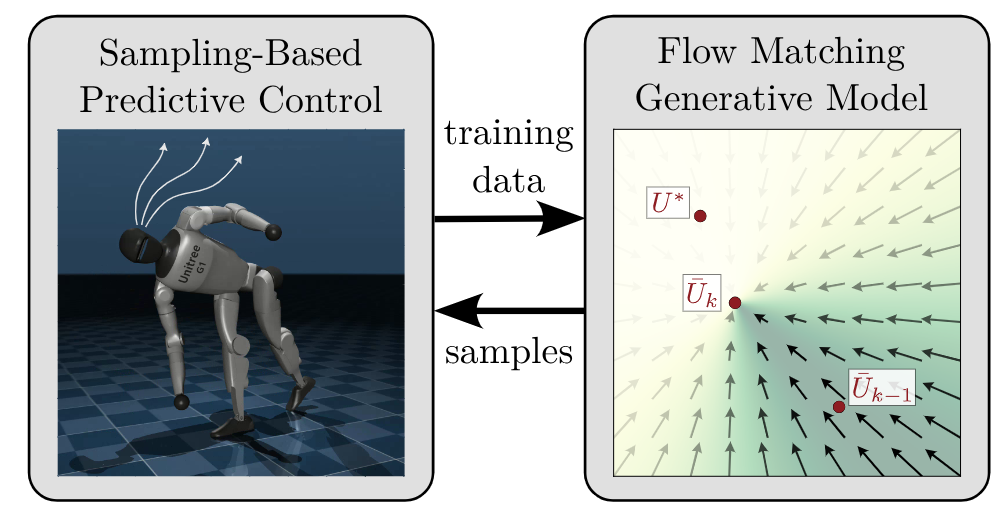
- GPC는 샘플링 기반 예측 제어(Sampling-based Predictive Control, SPC)를 통해 고품질 훈련 데이터를 생성하고, 이를 반복적으로 활용하여 흐름 일치(flow matching) 정책을 감독 학습 방식으로 학습시킵니다.
- GPC는 warm-start를 통해 빠른 동적 시스템에서 높은 주파수의 제어를 가능하게 하며, 다양한 로봇 작업에서 SPC와 유사하거나 더 나은 성능과 훈련 안정성을 보여주었습니다.
Brief Review
이 논문은 로봇 공학에서 빠른 다이내믹스를 가지지만 전문가 데모를 얻기 어려운 작업들을 위해 Generative Predictive Control (GPC)이라는 새로운 지도 학습 프레임워크를 제안합니다. 기존의 생성 정책들은 데모 데이터에 크게 의존하고 느리거나 준정적인(quasi-static) 작업에 한정되는 한계가 있었습니다. GPC는 샘플링 기반 예측 제어(Sampling-based Predictive Control, SPC)와 생성 모델링 사이의 깊은 연결을 활용하여 이러한 문제를 해결합니다.
핵심 방법론은 다음과 같습니다:
- SPC와 생성 모델링의 연결성:
- 논문은 SPC 업데이트 규칙이 노이즈가 있는 타겟 분포의 스코어(score)에 대한 Monte Carlo 추정치임을 보여줍니다. 특히, 초기 상태 x에 조건화된 타겟 분포 p(U | x) \propto g(J(U; x))를 정의합니다. 여기서 U는 T 길이의 액션 시퀀스이고, J(U;x)는 비용 함수, g(\cdot)는 SPC 알고리즘별 가중 함수입니다.
- 노이즈가 있는 타겟 분포 p_\sigma(U | x) \propto E_{\tilde{U} \sim \mathcal{N}(U, \sigma^2)}[g(\tilde{U})]를 정의할 때, 이 분포의 스코어는 다음과 같이 주어집니다: \nabla_U \log p_\sigma(U | x) = \frac{1}{\sigma^2} \frac{E_{\tilde{U} \sim \mathcal{N}(U, \sigma^2)}[g(\tilde{U})(\tilde{U} - U)]}{E_{\tilde{U} \sim \mathcal{N}(U, \sigma^2)}[g(\tilde{U})]}
- 이는 SPC 업데이트 \bar{U}_k = \bar{U}_{k-1} + \sum_{i=1}^N g(J^{(i)})(U^{(i)} - \bar{U}_{k-1}) / \sum_{i=1}^N g(J^{(i)})가 스코어 상승(\bar{U}_k \leftarrow \bar{U}_{k-1} + \sigma^2 \nabla_{\bar{U}_{k-1}} \log p_\sigma(\bar{U}_{k-1} | x_{k-1}))에 대한 Monte Carlo 추정치를 제공한다는 것을 의미합니다. 이 연결을 통해 SPC의 평균 액션 시퀀스 \bar{U}_k를 상태 x_k에 조건화된 최적 액션 분포 p(U|x_k) \propto g(J(U;x_k))에서 추출된 것으로 볼 수 있습니다.
- GPC 프레임워크:
- GPC는 SPC를 통해 시뮬레이션에서 생성된 데이터 (\bar{U}_k, x_k)를 사용하여 플로우 매칭(flow matching) 모델을 학습합니다. 이 모델은 다음과 같은 벡터 필드를 학습합니다: \dot{U} = v_\theta(U, x, t)
- 이는 t=0에서의 \mathcal{N}(0, I) 샘플 U_0를 t=1에서의 타겟 분포 p(U|x_k)로 밀어냅니다. 학습은 다음과 같은 조건부 플로우 매칭 손실을 최소화하는 방식으로 이루어집니다: \mathcal{L}_{GPC}(\theta; U_0, \bar{U}_k, x_k, t) = \left\| v_\theta(t \bar{U}_k - (1-t)U_0, x_k, t) - (\bar{U}_k - U_0) \right\|^2
- 여기에 \bar{U}_k - \bar{U}_{k-1}와 \bar{U}_k - U_0 간의 코사인 유사도에 기반한 가중치 w(\bar{U}_k, \bar{U}_{k-1}, U_0)를 추가하여 훈련 효율을 높입니다.
- GPC는 시뮬레이션과 모델 학습의 여러 사이클을 수행합니다. 각 사이클에서 부분적으로 훈련된 플로우 매칭 정책에서 생성된 샘플은 SPC를 부트스트랩하는 데 사용되어, 개선된 샘플링 분포와 더 나은 훈련 데이터를 제공합니다. 이는
Algorithm 1에 명시되어 있으며, 병렬 시뮬레이션 환경, 병렬 롤아웃, 모델 훈련 단계에서의 병렬화를 통해 효율성을 극대화합니다.
- 훈련된 GPC 정책의 활용 (Warm-starts):
- 훈련된 GPC 정책을 사용하는 두 가지 방법이 있습니다.
- GPC (직접 배포): 정책을 직접 배포하여, 특히
warm-starts를 사용하여 순행하는(receding-horizon) 방식으로 액션을 적용합니다.warm-starts는 플로우 생성 과정을 U_0 = (1 - \alpha)\mathcal{N}(0, I) + \alpha \bar{U}_{k-1}에서 시작하여, 이전 시간 단계의 샘플과 일관성을 유지하도록 돕고, 빠른 피드백 루프에서 발생할 수 있는 “jittering” 현상을 줄여줍니다. - GPC+ (부트스트랩): 정책 샘플을 일반적인 가우시안 제안 분포에서 온 샘플과 함께 SPC에 활용합니다. 이는 추론 시 계산 리소스를 활용하여 더 나은 성능을 달성합니다.
- GPC (직접 배포): 정책을 직접 배포하여, 특히
- 훈련된 GPC 정책을 사용하는 두 가지 방법이 있습니다.
- 위험 인식 도메인 무작위화 (Risk-Aware Domain Randomization, DR):
- 대규모 병렬 시뮬레이터를 활용하여 SPC 롤아웃 시 여러 무작위 도메인에서 각 액션 시퀀스를 시뮬레이션하여 비용 데이터 J^{(i,d)}를 수집합니다.
- 이를 평균(E_d[J^{(i,d)}]), 최악의 경우(\max_d[J^{(i,d)}]), 또는 조건부 위험 가치(CVaR)와 같은 위험 메트릭스를 사용하여 집계하여 정책의 견고성을 높입니다.
실험 결과:
논문은 진자(inverted pendulum)부터 인간형 로봇(humanoid standup)에 이르는 7가지 시스템에 대해 GPC를 평가했습니다. GPC는 Multi-modal 추론이 필요한 push-T 작업과 빠른 동역학이 필요한 double cart-pole과 같은 작업을 높은 제어 주파수에서 효과적으로 처리할 수 있음을 보여주었습니다. 특히, warm-starts는 double cart-pole과 같은 동적 시스템에서 부드러운 고주파수 제어를 가능하게 하는 데 중요했습니다. GPC는 SPC와 유사하거나 더 나은 성능을 보였고, GPC+는 모든 예시에서 다른 방법들의 성능을 능가했습니다. 훈련 안정성 측면에서는 지도 학습의 장점을 보였고, 위험 인식 DR 전략은 모델 오차가 있는 시나리오에서 정책의 견고성을 향상시켰습니다. 그러나 가장 크고 어려운 humanoid standup 예시에서는 GPC 정책만으로는 안정적인 성능을 내기 어려웠으며, GPC+만이 효과적이었습니다. 이는 현재 방법의 확장성 한계를 시사합니다.
결론 및 한계:
GPC는 시뮬레이션하기 쉽지만 데모하기 어려운 동적 작업에 대한 플로우 매칭 정책을 학습하기 위한 유망한 프레임워크입니다. SPC와의 연결성을 통해 전문가 데모 없이 지도 학습을 위한 훈련 데이터를 생성하고, warm-starts는 시간적 일관성을 보장하며 실시간 고주파수 제어를 가능하게 합니다. 주요 한계로는 가장 복잡한 작업에서의 제한된 효과성, 비교적 높은 샘플 복잡성(단일 훈련 데이터 포인트 생성에 N번의 시뮬레이션 필요), 그리고 액션 시퀀스 표현의 단순성 등이 언급되었습니다. 향후 연구는 가치 함수 학습 통합, 하드웨어 검증, 일반화된 Multi-task 정책 훈련, 그리고 제약 조건이 있는 생성 모델링 등을 포함할 것입니다.