📃PCHands 리뷰
🔍 Ping. 🔔 Ring. ⛏️ Dig. A tiered review series: quick look, key ideas, deep dive.
- 🦾 PCHands는 다양한 매니퓰레이터의 공통된 손 자세 시너지를 학습하기 위해 Anchor Description Format (ADF)과 CVAE 및 PCA를 결합한 새로운 프레임워크를 제안합니다.
- 🔄 이 방법은 매니퓰레이터의 앵커 위치를 기반으로 가변 길이 latent representation을 학습하고, ICP를 통한 end-effector 프레임 정렬로 다양한 DoF 매니퓰레이터 전반에 걸쳐 일관된 시너지 축을 추출합니다.
- ✨ 실험 결과, PCHands는 Reinforcement Learning에서 observation 및 action space를 효율적으로 인코딩하여 학습 효율성과 일관성을 향상시키며, 다른 매니퓰레이터의 데모를 활용한 robust한 transfer learning을 가능하게 합니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
이 논문은 다양한 형태의 조작기(manipulator) 전반에 걸쳐 dexterous manipulation을 위한 공통된 표현을 학습하는 문제를 다룹니다. 저자들은 이 문제를 해결하기 위해, 광범위한 조작기들로부터 손 자세 시너지(hand postural synergy)를 추출하는 새로운 PCA 기반 접근 방식인 PCHands를 제안합니다.
핵심 방법론 (Core Methodology)
PCHands는 세 가지 주요 구성 요소인 Anchor Description Format (ADF), Conditional Variational Auto-Encoder (CVAE), 그리고 Principal Component Analysis (PCA)를 사용하여 가변 길이(variable-length)의 손 자세 시너지 표현을 학습합니다.
- Anchor Description Format (ADF) ADF는 다양한 조작기(2-finger gripper부터 5-finger anthropomorphic hand까지)의 구성을 통일된 방식으로 표현하기 위해 설계되었습니다.
- Anchor Placement: 미리 정의된 22개의 3D 포인트 \alpha = \{x_i | x_i \in \mathbb{R}^3\}_{i=1}^{22}를 조작기의 기능적 부분에 수동으로 배치합니다. 예를 들어, 5-finger anthropomorphic hand의 경우 각 손가락에 4개의 앵커(proximal, intermediate, distal, tip phalanges)와 손바닥에 2개를 배치합니다. 2-finger gripper의 경우, 4개의 엄지 앵커는 왼쪽 jaw에 할당되고, 나머지 16개의 손가락 앵커는 오른쪽 jaw에 병합(anchor-merging)됩니다. 이 병합 방식은 손가락 수가 적은 조작기에도 일반화됩니다. 각 앵커는 표현하는 영역에 대한 상징적 의미를 일관성 있게 전달합니다.
- Preliminary End-effector Frame Placement: 조작기의 손바닥(palm) 또는 그리퍼 베이스(gripper base)의 중앙에 초기 end-effector frame을 정의합니다. x축은 손바닥에서 바깥쪽으로, y축은 손목(hands) 또는 엄지 jaw(grippers)를 향하도록 설정됩니다. 모든 앵커 위치는 이 프레임에 상대적으로 표현됩니다. 그러나 형태학적 차이로 인해 이 초기 프레임은 조작기마다 불일치를 보이므로, 이 문제를 해결하기 위해 iterative refinement 과정(아래 설명)을 거칩니다.
- Postural Synergy Model PCHands는 앵커 위치와 주성분 계수(principal component coefficients) 사이의 인코딩 및 디코딩을 가능하게 하는 CVAE와 선형 PCA를 연결하여, 조작기 자세의 저차원 표현을 추출합니다.
- CVAE (Conditional Variational Auto-Encoder):
- 앵커 위치 \alpha의 차원을 줄여 저차원 latent variable z로 인코딩합니다 (\text{dim}(z) \ll 22 \times 3).
- CVAE의 인코더와 디코더 모두 조작기를 식별하는 one-hot vector에 의해 조건화(conditioned)됩니다.
- 이 모델은 입력 앵커 x_i와 재구성된 앵커 \hat{x}_i 사이의 가중 L_1 손실을 최소화합니다: \min_{\phi, \theta} \sum_{i=1}^{22} w_i (x_i - \hat{x}_i) 여기서 w_i는 training dataset에서 앵커 병합(anchor merging) 사용에 따라 경험적으로 설정됩니다. (예: 엄지 앵커와 같이 거의 병합되지 않는 앵커에 더 높은 가중치를 부여하여 균형 잡힌 재구성을 보장합니다.)
- Training Dataset: m개의 조작기(각 조작기당 n=10000개의 구성 샘플)로부터 앵커 데이터를 수집하여 CVAE를 훈련합니다. 각 구성은 조작기 joint position을 kinematics constraints 내에서 균일하게 샘플링하여 생성되며, 해당 앵커 위치는 forward kinematics를 통해 계산된 후 업데이트된 end-effector frame으로 표현되고 3D Cartesian space에서 단위 가우시안(unit Gaussian)으로 정규화됩니다.
- PCA Reduction:
- CVAE의 latent variable z에 선형 PCA를 적용하여 z의 차원을 주성분 계수 z'로 추가적으로 줄입니다. 이를 통해 저자들은 가변 길이의 latent representation을 얻습니다.
- PCA를 CVAE 이후에 적용하는 이유는, CVAE가 조작기 간의 형태학적(inter-manipulator) 변화를 모델링하여, PCA가 모든 조작기에 걸친 자세 변화(pose variation)에 집중할 수 있도록 하기 위함입니다. 이는 단순히 앵커 공간에 직접 PCA를 적용했을 때 형태학적 차이가 첫 번째 주성분을 지배하여 시너지 표현 능력을 저해하는 문제를 해결합니다.
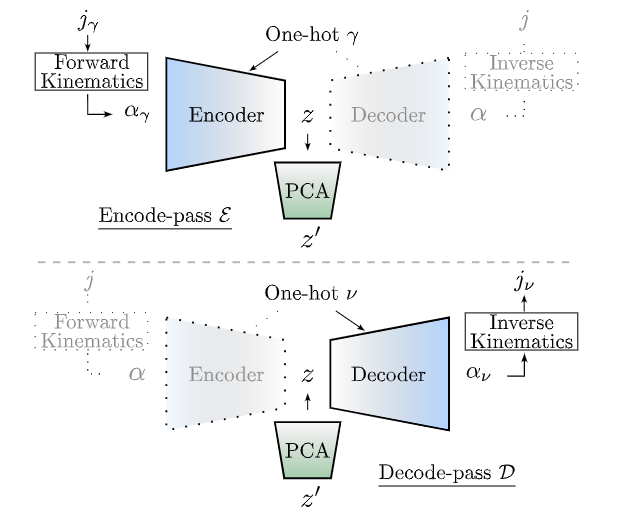
- Encode Pass: Joint values j를 compact한 주성분 표현 z'으로 변환합니다: E: j \to \alpha \to z \to z'. 이 과정은 forward kinematics를 통해 j를 \alpha로 변환하고, CVAE 인코더를 통해 \alpha를 z로 인코딩한 후, PCA를 통해 z를 z'으로 변환합니다.
- Decode Pass: Compact한 주성분 표현 z'을 joint values j로 변환합니다: D: z' \to z \to \alpha \to j. 이 과정은 inverse PCA를 통해 z'을 z로 변환하고, CVAE 디코더를 통해 z를 \alpha로 재구성한 후, multi-objective inverse kinematics를 통해 \alpha를 j로 변환합니다.
- Separation of Synergies and Hardware: PCHands는 시너지 모델을 forward 및 inverse kinematics를 담당하는 하드웨어 계층으로부터 분리하여 하드웨어에 구애받지 않는(hardware-agnostic) 동작을 가능하게 합니다. 특정 조작기 \gamma의 자세 j_\gamma를 다른 조작기 \nu로 리타겟팅(retargeting)할 때, 공통의 latent representation을 공유하면서 각각의 하드웨어 계층이 인코딩 및 디코딩 과정에서 적용됩니다: j_\nu = D_\nu(E(\gamma, j_\gamma)).
- CVAE (Conditional Variational Auto-Encoder):
- Refinement of End-effector Frame 초기 end-effector frame의 형태학적 불일치를 해결하기 위해, PCHands는 end-effector frame을 정제하고 시너지 모델을 재훈련하는 반복적인 과정을 수행합니다 (Algorithm 1).
- Iterative Learning Procedure: 이 절차는 시너지 모델을 훈련하는 단계와 end-effector frame을 정제하는 단계를 반복합니다. 이를 통해 시너지 모델은 항상 최신 조정된 end-effector frame을 참조하는 데이터셋으로 훈련됩니다.
- Anchors Alignment (Algorithm 2):
- 이 정제 절차는 Robotiq-2f85, Google-gripper, Kinova-3f, Armar-hand와 같은 reference manipulator의 앵커를 사용하여 target manipulator의 앵커를 정렬합니다.
- 첫 번째 주성분(1^{st} PC)에서 k개의 균등하게 분포된 지점들을 샘플링합니다 (예: z'_i = [i, 0, \dots, 0]).
- 각 지점에서 decode-pass를 사용하여 샘플링된 주성분 계수를 target manipulator와 reference manipulator의 앵커로 매핑합니다.
- reference manipulator들로부터 평균 앵커 위치를 계산합니다.
- 이 k개의 구성에서 target 앵커와 reference 앵커 간의 직접적인 대응을 사용하여 target manipulator의 end-effector frame에 대한 조정을 계산합니다.
- 최적의 rigid transformation \delta = \{R, t\} \in SE(3)는 ICP (Iterative Closest Point)의 단일 스텝을 사용하여 계산됩니다. ICP는 다음 목적 함수를 최소화합니다: \min_{R, t} \sum_{i=1}^k \left\| \alpha^{\text{ref}}_i - R\alpha^{\text{tgt}}_i - t \right\|^2 여기서 손가락 끝(fingertips)과 엄지 앵커(thumb anchors)에는 더 균형 잡힌 정렬을 위해 더 높은 가중치가 부여됩니다.
실험 및 결과
- 정성적 분석: PCHands는 다양한 조작기에서 일관된 손 자세 시너지와 end-effector frame을 제공합니다. 첫 번째 주성분은 조작기 간에 일관되게 보편적인 ‘열기-닫기(opening-closing)’ 모션에 해당합니다.
- 강화 학습(RL)에서의 활용: PCHands는 RL 설정에서 dexterous manipulation task를 해결하는 데 사용되었습니다. 기존의 joint space에서 학습하는 baseline보다 PCHands의 N-pc (N principal components) latent representation을 observation 및 action space에 사용했을 때 더 빠른 학습 효율성과 일관성을 보여주었습니다. DAPG(Demo Augmented Policy Gradient)에서 인간 시연(demonstrations)을 사용하는 경우 PCHands는 시연 데이터를 latent space로 변환하는 과정에서 유용한 정보가 보존됨을 입증했습니다.
- 시연 소스(Source of Task Demonstrations)에 대한 Ablation: PCHands는 다른 조작기로 수집된 시연 데이터를 사용하여도 강력한 성능을 보여주며, 시연 데이터 재사용의 효율성을 입증했습니다.
- 실세계(Real-World) 환경으로의 이전: 시뮬레이션에서 훈련된 PCHands 정책은 sim-to-real adaptation 없이 실제 로봇에서도 비교적 좋은 성능을 보였습니다. 4-finger manipulator의 경우, 물체 occlusions로 인한 vision-based object pose tracker의 부정확성으로 성능 저하가 있었으나, 2-finger manipulator의 성능은 시뮬레이션 결과와 유사했습니다.
결론
PCHands는 인간과 로봇 조작기 전반에 걸쳐 통일된 시너지 표현을 추출하는 프레임워크를 제공합니다. ADF, CVAE, PCA 및 ICP를 활용하여 latent manipulator representation을 추출하고, task 및 joint dimensionality를 줄이며, end-effector frame을 정렬합니다. 이는 RL 기반 조작 작업에서 효율성을 향상시키고, 다양한 소스에서 시연 데이터를 견고하게 학습하는 것을 지원합니다. PCHands는 시뮬레이션에서 훈련된 정책이 실제 조작기로 직접 전이될 수 있음을 보여주어, 효과적인 데이터 및 정책 전이를 통한 확장 가능한 로봇 모델 훈련의 가능성을 제시합니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
1. 들어가며: 왜 이 연구가 중요한가?
로봇 공학에서 데이터는 새로운 석유라고 할 수 있습니다. 자연어 처리(NLP)와 컴퓨터 비전(CV) 분야에서는 수십억 개의 데이터 포인트를 활용한 대규모 모델들이 놀라운 성과를 보여주고 있습니다. GPT-4는 1.5~4.5B개의 태스크로 학습되었고, CLIP과 같은 비전 모델들은 5~18M개의 이미지-텍스트 쌍으로 훈련되었습니다.
하지만 로봇 공학은 어떨까요? Open X-Embodiment와 같은 대규모 로봇 데이터셋도 고작 0.16M개의 태스크만을 포함하고 있습니다. 이는 NLP나 CV 대비 수천 배 적은 규모입니다. 더욱 심각한 문제는 이러한 데이터셋의 대부분이 단순한 2-핑거 그리퍼(two-finger gripper)를 사용한 작업에 국한되어 있다는 점입니다.
여기서 핵심적인 질문이 제기됩니다: 서로 다른 형태(morphology)와 자유도(DoF)를 가진 다양한 매니퓰레이터들에 대해 통합된 표현(unified representation)을 학습할 수 있을까? 만약 가능하다면, 인간 손 데이터, 5-핑거 로봇 손 데이터, 심지어 단순한 그리퍼 데이터까지 모두 활용하여 범용적인 조작(manipulation) 정책을 학습할 수 있을 것입니다.
바로 이 문제를 해결하기 위해 IIT(Italian Institute of Technology)의 연구팀이 제안한 것이 PCHands입니다.
2. PCHands의 핵심 아이디어
PCHands는 “Postural synergies(자세 시너지)”라는 신경과학적 개념을 로봇 공학에 적용합니다. 인간의 손은 약 20개 이상의 자유도를 가지고 있지만, 실제로 대부분의 일상적인 파지(grasping) 동작은 소수의 “시너지” 패턴의 조합으로 설명될 수 있다는 것이 알려져 있습니다.
PCHands는 이 아이디어를 확장하여, 인간 손부터 5-핑거 인체공학적 로봇 손, 3-핑거 그리퍼, 심지어 2-핑거 병렬 그리퍼까지 17가지 서로 다른 매니퓰레이터에 대해 통합된 자세 시너지 표현을 학습합니다.
핵심 기여 3가지
통합된 가변 길이 표현 학습: CVAE와 PCA를 결합하여 다양한 매니퓰레이터에 대해 공통된, 그러면서도 유연한 차원의 잠재 표현을 학습
Anchor Description Format (ADF): 22개의 앵커 포인트를 사용하여 서로 다른 형태의 매니퓰레이터를 통일된 형식으로 기술
강화학습 기반 조작 작업에서의 효용성 입증: 공동 공간(joint space)에서 학습하는 기존 방법 대비 더 빠른 수렴과 높은 일관성 달성
3. 기술적 방법론 심층 분석
3.1 Anchor Description Format (ADF): 매니퓰레이터의 통일된 언어
PCHands의 첫 번째 핵심 구성요소는 ADF입니다. 서로 다른 구조의 매니퓰레이터를 비교하려면 공통된 “언어”가 필요합니다. ADF는 22개의 3D 앵커 포인트 \alpha = \{x_i | x_i \in \mathbb{R}^3\}_{i=1}^{22}를 정의하여 이 역할을 수행합니다.
5-핑거 인체공학적 손의 경우: - 각 손가락당 4개의 앵커 (근위, 중간, 원위, 끝 마디) - 손바닥에 2개의 앵커 - 총 22개 앵커
2-핑거 그리퍼의 경우: - 왼쪽 jaw에 엄지 앵커 4개 할당 - 오른쪽 jaw에 나머지 16개 손가락 앵커 병합 - 손바닥 앵커는 그리퍼 베이스 중앙에 배치
이러한 “앵커 병합(anchor-merging)” 접근법은 손가락 수가 5개 미만인 모든 매니퓰레이터에 일반화됩니다. 각 색상으로 구분된 앵커는 매니퓰레이터 전반에 걸쳐 일관된 기능적 의미를 가집니다.
3.2 2단계 차원 축소: CVAE + PCA
PCHands의 핵심 아키텍처는 CVAE(Conditional Variational Auto-Encoder)와 PCA(Principal Component Analysis)의 직렬 연결입니다.
CVAE 단계
CVAE는 앵커 위치 \alpha를 잠재 변수 z로 인코딩합니다. 여기서 \text{dim}(z) \ll 22 \times 3입니다. 목적 함수는 다음과 같습니다:
\mathcal{L}_{\theta,\phi}(x,c) = \mathbb{E}_{z \sim q_\phi(z|x,c)}[\log p_\theta(x|z,c)] - \lambda D_{KL}(q_\phi(z|x,c) \| p_\theta(z))
중요한 점은 조건 변수 c가 매니퓰레이터 식별자의 one-hot 벡터라는 것입니다. 이를 통해 CVAE는 매니퓰레이터 간의 차이를 모델링하면서, 잠재 공간 z에서는 자세 변화에 집중할 수 있습니다.
재구성 손실은 가중 L1 손실을 사용합니다:
\min_{\phi,\theta} \sum_{i=1}^{22} |w_i(x_i - \hat{x}_i)|
가중치 w_i는 앵커 병합 사용 빈도에 따라 휴리스틱하게 설정됩니다. 예를 들어, 엄지 앵커처럼 드물게 병합되는 앵커는 더 높은 가중치를 받아 균형 잡힌 재구성을 보장합니다.
PCA 단계의 필요성
여기서 자연스러운 질문이 제기됩니다: “왜 CVAE만으로 충분하지 않은가?”
저자들은 vanilla PCA를 직접 앵커 공간에 적용할 때의 한계를 명확히 보여줍니다. 그림 3에서 볼 수 있듯이, 직접 PCA를 적용하면 첫 번째 주성분이 매니퓰레이터 간의 형태학적 차이를 과도하게 표현하게 됩니다. 즉, 데이터셋 구성에 따라 자세 정보를 표현하는 능력이 상실됩니다.
반면, CVAE가 매니퓰레이터 간 변동을 모델링하면 PCA는 자세 변동에 집중할 수 있습니다. 이것이 바로 2단계 접근법의 핵심 통찰입니다.
PCA를 통해 잠재 변수 z를 주성분 계수 z'로 변환함으로써: - 저자유도 매니퓰레이터(예: 대부분의 2-핑거 그리퍼는 1 DoF만 가짐)의 중복성 방지 - 다운스트림 태스크의 복잡도에 따른 유연한 차원 선택 가능
3.3 엔드이펙터 프레임 정제: ICP를 활용한 반복적 정렬
형태학적 차이로 인해 초기 엔드이펙터 프레임 배치는 매니퓰레이터 간에 일관성이 없습니다. PCHands는 Iterative Closest Point (ICP) 알고리즘을 활용한 반복적 학습 절차로 이 문제를 해결합니다.
알고리즘 개요
입력: ADF 형식의 M개 매니퓰레이터
출력: 시너지 모델 ψ, 프레임 정렬 δ
1. δ₀ ← 0 // 초기 정렬은 identity
2. while i ≤ budget do
3. A_i ← create_dataset(δ_i) // 현재 정렬로 데이터셋 생성
4. ψ_i ← train_model(A_i) // CVAE+PCA 학습
5. foreach M do
6. δ_{i+1} ← refine_frame(ψ_i) // ICP로 프레임 정제
7. return ψ, δ앵커 정렬 상세
프레임 정제를 위해 4개의 참조 매니퓰레이터(Robotiq-2f85, Google-gripper, Kinova-3f, Armar-hand)를 선택합니다. 선택 기준은 단순성과 형태학적 다양성입니다.
정제 과정: 1. 첫 번째 주성분을 따라 k개의 등간격 점을 샘플링 2. 각 점에서 decode-pass를 사용하여 타겟 및 참조 매니퓰레이터의 앵커 계산 3. 참조 매니퓰레이터들의 평균 앵커 위치 계산 4. 가중 SVD를 사용한 ICP로 최적 강체 변환 \delta = \{R, t\} \in SE(3) 계산
\min_{R, t} \sum_{i=1}^{k} \|\alpha_i^{\text{ref}} - R\alpha_i^{\text{tgt}} - t\|^2
손끝과 엄지 앵커에 더 높은 가중치를 부여하여 균형 잡힌 정렬을 달성합니다.
3.4 인코드-디코드 패스: 실제 사용법
인코드 패스 \mathcal{E}: j \mapsto \alpha \mapsto z \mapsto z' 1. 순운동학으로 관절 값 j를 앵커 위치 \alpha로 변환 2. CVAE 인코더로 \alpha를 잠재 표현 z로 인코딩 3. PCA로 z를 주성분 계수 z'로 변환
디코드 패스 \mathcal{D}: z' \mapsto z \mapsto \alpha \mapsto j 1. 역 PCA로 z'를 z로 복원 2. CVAE 디코더로 z를 앵커 위치 \alpha로 재구성 3. 다목적 역운동학으로 \alpha를 관절 값 j로 변환
자세 리타게팅: 매니퓰레이터 \gamma에서 \nu로의 자세 전달은 다음과 같이 간단합니다:
j_\nu = \mathcal{D}(\nu, \mathcal{E}(\gamma, j_\gamma))
이 접근법의 아름다움은 시너지 모델이 하드웨어 계층과 분리된다는 점입니다. 인코딩과 디코딩 시 각각의 하드웨어 계층만 교체하면 됩니다.
4. 실험 결과 분석
4.1 실험 설정
- 매니퓰레이터: 17종 (Robotiq, WidowX, Fetch, xArm, WSG50, Rethink, Kinova2F, GoogleBot, Kinova3F, Franka, Armar, ergoCub, Schunk, Allegro, Shadow, LEAP, MANO)
- 데이터셋: 매니퓰레이터당 10,000개 구성 샘플 (총 170,000개)
- CVAE 구조: 4-layer MLP + Layer Normalization, \text{dim}(z) = 10
4.2 정성적 분석: 첫 번째 주성분의 의미
놀라운 발견은 첫 번째 주성분이 모든 17개 매니퓰레이터에서 “손 열기/닫기” 동작을 일관되게 표현한다는 점입니다.
그림 4에서 확인할 수 있듯이: - 1^{\text{st}}\text{pc} = 3: 완전히 열린 구성 - 1^{\text{st}}\text{pc} = -3: 완전히 닫힌 구성
이는 2-핑거 그리퍼부터 5-핑거 인체공학적 손, 심지어 비강체(non-rigid) MANO 손 모델까지 일관되게 적용됩니다. 이것은 PCHands가 단순한 차원 축소를 넘어 의미론적으로 일관된 표현을 학습했음을 보여줍니다.
4.3 강화학습 기반 조작 태스크
벤치마크 설정
- 태스크: Open-Door, Relocate-Mustard, Relocate-MeatCan, Relocate-SoupCan, Flip-Mug (5가지)
- 매니퓰레이터: Allegro (16 DoF), Schunk (9 DoF), Shadow (18 DoF) (3가지)
- RL 알고리즘: TRPO (데모 없음), DAPG (데모 사용)
- 비교 대상: 관절 공간에서 학습하는 최신 baseline [Qin et al., 2022]
학습 곡선 분석
그림 5의 결과는 인상적입니다:
- 빠른 수렴: PCHands는 대부분의 경우에서 baseline보다 빠르게 수렴
- DAPG 우월성: 인간 데모가 로컬 옵티마 회피에 도움
- 저차원 표현의 효과: 1-pc와 2-pc가 4-pc보다 대체로 우수
특히 마지막 발견이 중요합니다. 16, 9, 18 DoF를 가진 복잡한 매니퓰레이터들도 단 2개의 주성분만으로 충분히 학습 가능하다는 것입니다. 이는 “curse of dimensionality”를 극복하는 실질적인 방법을 제시합니다.
4.4 데모 소스 교차 실험: 진정한 전이 가능성
이 실험이 아마도 가장 흥미로운 부분일 것입니다. 연구팀은 다음 질문에 답합니다: “다른 매니퓰레이터로 수집한 데모로도 학습이 가능한가?”
실험 설정: - 데모 소스: 2F (Robotiq-2f85), 3F (Kinova-3f), 4F (LEAP-hand) - 타겟 매니퓰레이터: 위와 동일한 3가지 - 총 9가지 조합 (동일 소스-타겟 포함)
결과 (그림 6): - 예상대로 동일 소스-타겟 조합에서 최고 성능 - 하지만 다른 소스의 데모로도 TRPO 대비 일관되게 높은 성능 - 특히 4F 타겟에서 이 효과가 두드러짐
이것이 왜 중요한가요? 실제 로봇 연구에서 데모 수집은 비용이 많이 듭니다. PCHands를 사용하면 이미 가지고 있는 어떤 매니퓰레이터의 데모로도 새로운 매니퓰레이터를 학습시킬 수 있습니다.
4.5 실세계 전이 실험
시뮬레이션에서 학습한 정책을 실제 로봇에 배포하는 것은 로봇 학습의 성배(holy grail)와 같습니다. PCHands는 이에 대해서도 유망한 결과를 보여줍니다.
실험 플랫폼
- 7-DoF Franka-Panda 로봇 팔
- Robotiq-2f85 (2F) 또는 LEAP-hand (4F)
- RealSense L515 외부 RGB-D 카메라
- FoundationPose를 통한 6D 물체 자세 추적
결과
| 태스크 | 타겟 | 2F 데모 | 3F 데모 | 4F 데모 | 평균 |
|---|---|---|---|---|---|
| Relocate-Mustard | 2F | 90% | 100% | 100% | 97% |
| 4F | 100% | 80% | 90% | 90% | |
| Relocate-MeatCan | 2F | 100% | 80% | 90% | 90% |
| 4F | 50% | 30% | 70% | 50% | |
| Relocate-SoupCan | 2F | 80% | 80% | 70% | 77% |
| 4F | 70% | 50% | 0% | 40% |
주목할 점: 1. 2F 매니퓰레이터는 모든 태스크에서 높은 성공률 유지 2. 4F 매니퓰레이터는 SoupCan에서 성능 저하
성능 저하의 원인은 흥미롭습니다: 4-핑거 encompassing 파지는 물체를 심하게 가리기 때문에 비전 기반 자세 추적기(FoundationPose)의 정확도가 떨어집니다. 시뮬레이션에서는 ground-truth 자세가 항상 사용 가능하므로 이 문제가 발생하지 않습니다. 이는 sim-to-real gap의 새로운 원인을 식별한 것으로, 향후 연구 방향을 제시합니다.
5. 강점과 한계 분석
강점
1. 실용적인 차원 축소
기존의 joint space 학습은 고차원 행동 공간의 저주에 시달립니다. PCHands는 2-pc만으로도 충분한 성능을 보여주며, 이는 RL 샘플 효율성을 크게 개선합니다.
2. 플러그 앤 플레이 아키텍처
시너지 모델과 하드웨어 계층의 분리는 새로운 매니퓰레이터 추가를 용이하게 합니다. 새 매니퓰레이터에 대해: 1. 22개 앵커 위치 정의 2. 순/역운동학 함수 구현 3. 기존 모델에 fine-tuning (또는 처음부터 재학습)
3. 데이터 효율성
다른 매니퓰레이터의 데모를 활용할 수 있다는 것은 실질적인 이점입니다. 값비싼 로봇 데모 수집 비용을 크게 줄일 수 있습니다.
4. 해석 가능성
첫 번째 주성분이 “손 열기/닫기”를 의미한다는 것은 단순히 흥미로운 발견이 아닙니다. 이는 학습된 표현이 의미론적으로 의미 있음을 보여주며, 디버깅과 정책 분석에 도움이 됩니다.
한계
1. 앵커 배치의 수동성
22개 앵커의 위치는 각 매니퓰레이터에 대해 수동으로 정의해야 합니다. 이는 새로운 매니퓰레이터를 추가할 때마다 전문가 지식과 시간이 필요함을 의미합니다.
2. 참조 매니퓰레이터 선택의 휴리스틱
ICP 정렬을 위한 참조 매니퓰레이터 선택은 “단순성과 형태학적 다양성”이라는 휴리스틱에 의존합니다. 이것이 최적의 선택인지는 명확하지 않습니다.
3. 비전 기반 자세 추정 의존성
실세계 실험에서 드러났듯이, 가려짐(occlusion)에 민감한 비전 기반 자세 추적은 병목이 될 수 있습니다. 이는 PCHands 자체의 한계라기보다는 시스템 통합의 문제이지만, 실제 배포 시 고려해야 합니다.
4. 촉각 및 힘 정보 부재
현재 PCHands는 순수하게 기하학적 표현입니다. 촉각 센서 정보나 파지 힘과 같은 중요한 조작 모달리티는 포함되어 있지 않습니다.
5. 태스크 범위의 제한
실험된 태스크들(Open-Door, Relocate, Flip)은 상대적으로 간단합니다. In-hand manipulation이나 tool use와 같은 더 복잡한 dexterous manipulation 태스크에서의 효과는 검증되지 않았습니다.
6. 기존 연구와의 비교 및 위치
자세 시너지 연구의 계보
PCHands는 로봇 손 자세 시너지 연구의 오랜 역사 위에 서 있습니다:
- PCA 기반 접근 [Ciocarlie 2007, Bernardino 2013]: 직접 관절 공간에 PCA 적용
- GPLVM 기반 [Xu 2016]: 비선형 확률 모델로 재구성 오차 개선
- AE/CVAE 기반 [Starke 2018, Dimou 2023]: 딥러닝으로 더 풍부한 잠재 공간 학습
PCHands의 차별점은 다중 매니퓰레이터에 대한 통합 표현입니다. 기존 연구들은 대부분 단일 매니퓰레이터에 초점을 맞추었습니다.
리타게팅 연구와의 비교
손 자세 리타게팅 분야에서 [Qin et al., 2022]의 AnyTeleop은 현재 state-of-the-art입니다. PCHands와의 주요 차이점:
| 측면 | AnyTeleop | PCHands |
|---|---|---|
| 리타게팅 방식 | 최적화 기반 (매 프레임) | 순전파만 사용 |
| 계산 비용 | 높음 | 낮음 |
| 실시간성 | 제한적 | 실시간 가능 |
| 공통 표현 | 없음 (관절 공간) | 있음 (시너지 공간) |
PCHands의 핵심 이점은 최적화 없이 순전파만으로 리타게팅이 가능하다는 점입니다. 이는 실시간 텔레오퍼레이션에 중요한 장점입니다.
7. 향후 연구 방향
저자들이 제시한 향후 연구 방향과 함께 제가 생각하는 추가적인 방향을 논의합니다.
저자들의 향후 연구 방향
- 더 큰/개방형 매니퓰레이터 집합으로 확장: 현재 17개에서 수십, 수백 개로
- 대규모 공개 데이터셋 활용: Open X-Embodiment의 2-핑거 그리퍼 데이터나 인간 데모 데이터를 활용한 복잡한 dexterous 태스크 학습
추가로 고려할 수 있는 연구 방향
1. 자동화된 앵커 배치
메쉬 분석이나 기능적 유사성 학습을 통해 앵커 위치를 자동으로 결정하는 방법 연구. 이는 새 매니퓰레이터 통합의 진입장벽을 낮출 것입니다.
2. 멀티모달 확장
촉각, 힘, 고유수용감각 정보를 시너지 표현에 통합. 이는 더 섬세한 조작 태스크에 필수적일 것입니다.
3. 계층적 시너지 표현
현재의 단일 레벨 PCA 대신, 태스크별 또는 파지 유형별 계층적 시너지 구조 학습. 이는 더 복잡한 행동의 구성성(compositionality)을 가능하게 할 것입니다.
4. 온라인 적응
새로운 매니퓰레이터에 대해 소량의 데이터로 빠르게 적응하는 few-shot 또는 meta-learning 접근법 연구.
5. 실세계 가려짐 문제 해결
촉각 피드백이나 강인한 상태 추정 기법을 통해 비전 기반 추적의 가려짐 문제 해결.
8. 실무적 시사점: 언제 PCHands를 사용해야 하는가?
사용을 권장하는 경우
다양한 매니퓰레이터로 데모를 수집해야 할 때: 연구실에 여러 종류의 로봇 손이 있다면, 어떤 것으로 수집한 데모든 활용 가능
RL 샘플 효율성이 중요할 때: 고차원 행동 공간의 저주를 피하고 싶다면 PCHands의 저차원 표현이 도움
실시간 리타게팅이 필요할 때: 텔레오퍼레이션 시스템에서 최적화 기반 방법은 지연을 유발. PCHands는 순전파만으로 실시간 처리 가능
해석 가능한 정책이 필요할 때: 행동 공간이 의미론적으로 해석 가능(예: PC1 = 손 열기/닫기)하면 디버깅과 분석이 용이
사용이 적합하지 않을 수 있는 경우
단일 매니퓰레이터만 사용할 때: 전이 가능성이 불필요하다면 더 간단한 방법이 적합할 수 있음
매우 세밀한 손가락 제어가 필요할 때: 2-pc 표현은 개별 손가락의 독립적 제어에 제한
새로운 매니퓰레이터를 자주 추가해야 할 때: 수동 앵커 배치의 오버헤드가 부담될 수 있음
9. 결론
PCHands는 로봇 조작 분야에서 오랫동안 다루어진 문제, 즉 다양한 매니퓰레이터 간의 표현 통합에 대해 실용적이고 효과적인 해법을 제시합니다.
핵심 아이디어인 “CVAE로 매니퓰레이터 간 차이를 모델링하고, PCA로 자세 시너지를 추출한다”는 단순하지만 강력합니다. 이 조합은:
- 17종의 매우 다른 매니퓰레이터에 대해 일관된 의미론적 표현 학습
- 기존 baseline 대비 더 빠른 RL 수렴
- 교차 매니퓰레이터 데모 활용 가능
- 실세계 전이에서도 유망한 결과
물론 한계도 있습니다. 수동 앵커 배치, 휴리스틱한 참조 매니퓰레이터 선택, 비전 기반 추적 의존성 등은 향후 해결해야 할 과제입니다.
하지만 “다양한 로봇 데이터를 어떻게 통합하여 범용적인 조작 정책을 학습할 것인가?”라는 질문에 대해, PCHands는 분명 한 걸음 나아간 대답을 제시합니다. 로봇 foundation model을 향한 여정에서, 이러한 표현 학습 연구는 필수적인 빌딩 블록이 될 것입니다.
⛏️ Dig Review
⛏️ Dig — Go deep, uncover the layers. Dive into technical detail.
최근 로봇공학에서는 다양한 형태의 매니퓰레이터를 아우르는 일반화된 조작 모델이 요구된다. 예를 들어, 인간의 손 움직임 데이터는 풍부하지만, 로봇의 데이터셋은 규모가 작고(예: 그리퍼 중심) 고 자유도 조작 데이터는 더욱 부족하다. 또한 관절 공간(Joint Angle Space, JAS)에서 직접 제어하는 방식은 자유도가 높은 경우 학습 효율이 떨어지고, 단순히 엔드이펙터의 카르테시안 제어(Cartesian Space, CAS)만으로는 정밀한 손 모양 제어가 어렵다. 이에 본 논문 “PCHands: PCA-based Hand Pose Synergy Representation on Manipulators with N-DoF”는 여러 기구학 구조(2~5지 손가락, 인위 핸드 등)를 망라하는 통일된 손 자세 표현을 제안한다. 핵심 아이디어는 앵커(Anchor) 포인트를 사용해 모든 매니퓰레이터의 손/그리퍼 형태를 표현하고, 변동이 있는 매니퓰레이터 구성 전체를 CVAE로 잠재공간에 인코딩한 뒤, 이를 PCA로 분해하여 공통된 포즈 시너지(postural synergy)를 추출하는 것이다. 이때 얻어지는 주성분(principal components) 은 모든 기구에 걸쳐 보편적으로 손 개폐(opening) 같은 운동 패턴을 나타낸다.
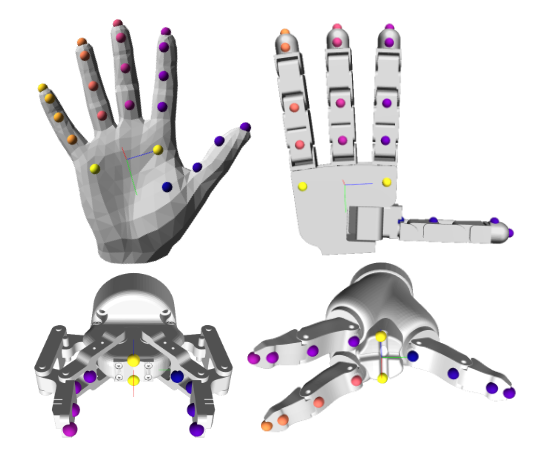
그림.1. PCHands의 앵커(Anchor) 배치 예시. 각 매니퓰레이터에 22개의 앵커를 정의하여 손가락과 팜(palm)을 대표한다. 예를 들어, 5지 손에서는 각 손가락에 근위, 중간, 원위, 손가락 끝(phalanx)에 각각 앵커를 배치하고, 2지 그리퍼에서는 한쪽 조이스틱(jaw)에 좌측 엄지 모형 앵커 4개, 다른 쪽에 16개를 할당하는 식이다. 앵커 포인트는 각각의 매니퓰레이터 기구학에서 적절히 정의된 3D 점으로, 이들을 통일된 기저(coordinate frame)에서 표현함으로써 서로 다른 자유도의 로봇도 같은 차원에서 비교·학습할 수 있다. PCHands에서는 초기 엔드이펙터 프레임을 손목 방향 등으로 정의한 뒤(그림 참조), Iterative Closest Point(ICP) 등을 통해 모든 매니퓰레이터의 앵커 좌표계를 정렬함으로써 표현의 일관성을 확보한다.
수학적 기법: PCA, CVAE, 그리고 앵커 기반 매핑
PCHands의 수학적 기반은 크게 차원 축소 기법과 운동학적 매핑으로 나뉜다. 우선 주성분분석(PCA)은 고차원 데이터를 공분산이 가장 큰 방향(주성분)으로 선형 분해해 하위 공간에 표현한다. 원 논문에 따르면, PCA는 로봇 핸드의 자세 공간을 저차원화하여 그립(grasp) 포즈의 시너지(주요 기저)를 찾는 데 쓰여 왔다. 예를 들어, Santello 등의 연구에서는 인간 손 자세의 몇 개 주성분만으로 대부분의 변동(≧80%)을 설명할 수 있음을 보였다(뇌과학 분야). PCHands는 이러한 포즈 시너지 개념을 멀티 매니퓰레이터에 적용한다. 하지만 단순 PCA로는 매니퓰레이터마다 형상이 다르므로 첫 번째 주성분이 손 구부림 대신 구조 차이에 민감해지는 단점이 있다. 따라서 조건부 변이형 오토인코더(CVAE)를 먼저 적용하여 비선형 잠재 표현을 학습한 후, 이 잠재공간에 PCA를 적용하는 하이브리드 방식을 쓴다. CVAE는 입력(앵커 위치)과 출력(재구성) 사이의 오토인코더에 잠재 분포 정규화(KL 발산) 항을 더한 신경망으로, here는 매니퓰레이터 ID를 조건(condition)으로 주어 학습한다. CVAE의 손실함수는 L1 재구성 오차에 가중치를 부여하고, 잠재공간은 정규분포를 따르도록 훈련된다. 이로써 서로 다른 로봇 구성에서 볼 수 있는 자세 변화를 공통의 잠재벡터 z 로 잡아낼 수 있다.
이후 PCA Reduction 단계에서, CVAE의 잠재벡터 z에 대해 선형 PCA를 수행하여 z의 주요 성분(PC)을 구한다. 이 변수길이(latent)의 PCA 결과가 손 시너지 표현이며, 원하는 차원 수(예: 1~10PC)를 자유롭게 선택할 수 있어 유연하다. 논문에서는 첫째 PC가 모든 손에서 손을 개방(open)하는 보편적 운동임을 관찰했다. 실제 조작 중에는 주성분 계수를 관찰(observation)과 행동(action) 공간으로 쓰는데, 예를 들어 RL 에이전트는 1~N개의 PC 계수를 입력/출력으로 활용한다. 전처리 과정에서 기계마다 순전방 운동학으로 앵커 위치를 구해 CVAE 인코더로 latent z로 변환하고, 다시 PCA 계수로 변환하여 encode pass를 완성한다. 반대로 decode pass에서는 PC 계수를 CVAE로 역변환하여 앵커 위치를 재구성하고, 역운동학(optimization)으로 각 관절각도를 계산하여 로봇 자세를 얻는다. 이렇게 하면 시너지 모델(PC 변환)은 공통으로 두고, 각 로봇의 기구층(forward/inverse kinematics)만 분리하여 적용할 수 있으므로 하드웨어 독립적으로 시너지를 쓴다.
마지막으로, 앵커 좌표계를 정렬하기 위한 프레임 보정 절차를 반복 학습에 포함한다. 알고리즘은 레퍼런스용 매니퓰레이터(예: 2F, 3F, 알마트 손 등)를 몇 가지 고정해두고, 첫 주성분 상에서 보간된 다수의 포인트를 뽑아 디코딩한다. 그런 다음 각 모션마다 레퍼런스 로봇들의 앵커 평균 위치와, 타겟 로봇의 앵커 위치 차이를 ICP로 계산하여 타겟의 엔드이펙터 기준계를 미세 조정한다. 이 과정을 반복하면, 모든 로봇의 앵커 표현이 가능한 한 일관되게 정렬된다. 요약하면, PCHands는 앵커 설명 포맷(ADF) → CVAE 학습 → PCA 축소 → 프레임 정렬이라는 파이프라인으로 작동하여 공통의 저차원 손 자세 시너지 공간을 만든다.
JAS, CAS, 시너지 기반 모델과 비교
로봇 손 매핑 또는 제어 방식은 크게 직접 관절 (JAS), 카르테시안 공간 (CAS), 차원 축소(시너지), 직접 작업(task-oriented) 등의 범주로 구분된다. Meattini 등의 분류에 따르면, JAS(Direct Joint)는 각 관절각을 직접 명령하는 방식이고, CAS(Direct Cartesian)는 손가락 말단 또는 엔드이펙터의 위치/자세를 명령하여 모션을 생성한다. 한편 시너지 기반 방식은 (예: PCA 등) 저차원 잠재벡터를 통해 고차원 관절을 제어하는 기법이다. 기존 연구에서 시너지 모델은 인간 손 데이터나 로봇 손 구성의 주성분을 찾는데 사용되었으며, 이를 이용해 인체 시연을 로봇으로 리타게팅하거나(bimanual teleop 등) 그립 생성 등에 활용해 왔다.
PCHands는 이 중 시너지 차원 제어를 선택하여 JAS 및 CAS 대비 장점을 보인다. 예를 들어 본 논문의 RL 실험에서는 16~18 자유도를 가진 Allegro, Schunk, Shadow와 같은 핸드 조작기들을 대상으로 한다. 기준선(베이스라인) 방법은 JAS를 사용하여 각 관절각을 직접 제어한다. 반면 PCHands에서는 1~N개의 주성분 계수만으로 (여기에 엔드이펙터 위치를 추가하는 flying-hand mode) 제어를 진행한다. 실험 결과, 학습 속도와 일관성 측면에서 PCHands가 JAS 기반 대비 우수했다. 특히 1~2개의 PC만 사용해도 16~18 자유도의 로봇 손을 효과적으로 학습할 수 있음이 관찰되었다. 또한 PCHands는 주성분과 별개로 엔드이펙터 위치 명령(CAS)을 동시에 취급(flying-hand mode)할 수 있어, 기존 CAS의 장점(물체 위치 제어)과 시너지의 장점(저차원 손 모양 제어)을 모두 가진다.
정성적으로도, PCHands가 추출한 첫째 주성분은 모든 기구에서 공통적인 손-개폐 운동을 나타낸다. 그림 3 하단과 그림 4를 보면, 순수 PCA(“vanilla PCA”)로는 매니퓰레이터마다 분포가 구조에 따라 군집화되지만, CVAE+PCA(PCHands)에서는 이러한 구조차이가 완화되고 손 모양 변화가 주축으로 잡힌다(그림 3). 즉 PCHands는 다양한 형태의 손 모두에서 일관된 시너지 기저를 학습하며, 동일한 시너지 좌표를 사용해 서로 다른 로봇 간에 자세를 재현(retargeting)할 수 있다. 예를 들어 사람 손의 자세를 임의로 변형한 영상을 5지나 2지 로봇에 그대로 매핑할 때, PCHands를 쓰면 복잡한 최적화 과정 없이도 양쪽 모두 자연스러운 자세를 얻을 수 있다.
종합하면, 비교 실험에서 PCHands는 JAS 기반 강화학습 대비 학습 효율 및 성공률 개선을 보여주었으며, 이는 저차원 시너지 표현이 동일한 작업을 더 빠르고 안정적으로 학습하도록 돕는 결과다. 또한 PCHands는 서로 다른 근원(소스) 로봇의 demonstration을 활용한 데모 증강 학습(DAPG)에서도 강인함을 보였다. 구체적으로, 2지/3지/4지 로봇에서 수집한 시연을 다른 핸드에 적용해도 PCHands를 쓴 정책이 일관되게 높은 성능을 내며, 시연이 같은 형태의 로봇에서 온 경우보다 딱히 페널티가 크지 않음을 확인했다. 이는 PCHands의 잠재 시너지 좌표로 변환함으로써 유용한 정보가 손실되지 않고 재사용됨을 시사한다. 다만, 전통적인 시너지 모델(예: Santello 방식)이나 기타 시너지 확장(“Synergy+”라고 부를 만한 새로운 방법)과 PCHands의 직접 비교 실험은 이루어지지 않았으나, PCHands의 접근법은 특히 매니퓰레이터 형태가 이질적일 때 강점을 가진다. 예를 들어 2지 그리퍼와 5지 손을 동일 벡터 공간에서 다루는 기존 방법은 없었으므로 PCHands는 이 점에서 독창적이다.
실험 결과와 분석
정성적 시너지 분석
PCHands가 학습한 시너지를 분석한 결과, 첫 번째 주성분(PC1)이 가장 의미 있었다. 논문에 따르면 PC1은 17개 로봇(다양한 자유도 포함)에서 공통의 손-개폐 운동을 나타냈다. 실제로 Fig.4를 보면 PC1을 +3~-3 범위로 움직였을 때 모든 로봇이 “손을 활짝 편(open)” 모양에서 “주먹 쥔(closed)” 모양까지 변화한다. 16개 강체 로봇과 1개의 비강체(MANO 모델) 손 모두 같은 PC1 축을 공유하여 일관된 동작을 보인 것이다. 이는 PCHands가 서로 다른 형상의 로봇 사이에서 동일한 잠재 표현을 공유함을 의미한다.
또한 CVAE의 잠재 공간에 대한 PCA 적용 전과 후를 비교하면(그림 3 하단), 단순 PCA 만으로는 손 모양보다는 로봇 종류마다의 차이가 PC1에 반영되었다. 반면 PCHands(CVAE+PCA)에서는 구조 차이를 제거하고 손 모양의 변화를 강조함으로써 진정한 시너지 표현을 뽑아낼 수 있었다. 즉, CVAE로 인터-매니퓰레이터 변형을 어느 정도 모델링해준 다음 PCA를 씌우면, 서로 다른 구조 간 편차가 적어지고 모든 손의 자세변화가 동일 축에서 비교 가능해진다.
강화학습 벤치마크
PCHands의 실효성을 평가하기 위해, 저자들은 네 가지 새로운 과제를 포함한 5가지 섬세한 조작 작업(Open-Door, Relocate-*, Flip-Mug)에서 실험을 진행하였다. 각 작업에 대해 3가지 로봇 손(Allegro, Schunk, Shadow)을 대상으로 하였고, 강화학습 알고리즘으로 TRPO와 DAPG(데모 증강 PG)을 사용했다. 기준선으로는 Qin 등(2022)의 방법을 채택하여 JAS로만 제어하는 정책을 비교대상으로 삼았다.
실험 결과, 학습 곡선과 최종 성공률에서 PCHands가 일관되게 우수했다. Fig.5 학습 곡선에 따르면, PCHands 정책은 대부분의 과제에서 JAS 기반 정책보다 수렴 속도가 빠르고(즉, 더 빨리 높은 리턴 달성) 안정적인 성능을 보였다. TRPO와 DAPG 모두에서 PCHands가 유리했으며, 특히 데모를 활용한 DAPG에서는 학습 초기부터 큰 성능 차이를 보였다. 또한, PCHands는 1~2PC만 사용할 때도 4PC를 쓸 때보다 더 좋은 결과를 보였다. 이는 16~18 자유도의 손조작에서도 사실상 2차원 정도의 시너지 차원으로 과제 수행이 가능함을 시사한다. 즉, 복잡한 다자유도 시스템을 극소수의 시너지 차원으로 효과적으로 제어할 수 있음을 의미한다.
데모 기반 학습 시에도 PCHands가 견고함을 보였다. 같은 작업이라도 서로 다른 로봇(2F,3F,4F)으로 수집된 50개의 시연을 사용해 정책을 학습했는데, PCHands를 사용하면 소스 로봇이 달라도 목표 로봇 성능이 비교적 잘 유지되었다. 예를 들어 2F에서 수집한 시연으로 4F 로봇을 학습시킬 때에도, TRPO 대비 DAPG(시연 사용)가 일관되게 우수한 성공률을 보였고, 심지어 4F 작업에서도 다른 소스의 시연으로 좋은 성능을 냈다. 이는 로봇 형상이 달라도 시너지 공간에서 유사한 작업 정보를 공유할 수 있음을 보여준다.
실세계 적용
추가로 저자들은 PCHands 정책을 실제 로봇에 옮겨보았다. Franka-Panda 7자유도 로봇 팔 끝단에 Robotiq 2F 혹은 4F LEAP 손을 달고, 위 시뮬레이션 정책(0-400 에피소드 학습된 DAPG)을 영점 샷(zero-shot)으로 실행했다. Relocate 등 몇몇 과제에서 2F/4F 모두 시뮬레이션 대비 약간의 성능 저하가 있었으나, 대체로 성과를 냈다. 특히 4F의 경우 물체가 손가락에 가려지는 시점 추적 문제로 SoupCan 작업에서 성능이 떨어졌으나, 2F의 경우 대부분 과제에서 시뮬레이션과 비슷한 성공률을 보였다. 이는 PCHands로 학습한 정책이 실제 환경에서도 일관되게 작동할 수 있음을시사한다.
비판적 분석 및 향후 과제
PCHands는 서로 다른 매니퓰레이터 사이에 공통된 저차원 손 자세 표현을 효과적으로 학습할 수 있음을 보였다. 특히 대규모 데이터 없이도 무작위 앵커 포지션 샘플로 학습하여, 긴 학습 없이도 즉시 RL에 활용 가능한 장점이 있다. 또한 앵커+CVAE+PCA 조합은 표현력과 유연성을 동시에 제공한다: CVAE로 복잡한 자세를 포괄하면서 PCA로 원하는 차원만큼 줄일 수 있다. 학습 효율 개선, 시연 공유, 실세계 전이 가능성 등 실용적 이점도 명확하다.
그러나 몇 가지 가정과 한계도 존재한다. 첫째, PCHands는 포즈(앵커 위치)에 기반하므로 물체 접촉이나 힘 제어 등 동적 정보는 반영하지 않는다. 즉, 로봇 손 끝의 접촉력 변화까지 시너지에 포함하려면 추가 연구가 필요하다. 둘째, 모든 매니퓰레이터에 대해 22개 앵커를 정의하고 전/후방 운동학 모델을 알아야 하므로, 신형 로봇 도입 시 준비 작업이 필요하다. 셋째, CVAE 학습과 ICP 정렬이 반복되므로 학습 과정이 복잡하고 계산 비용이 꽤 든다(다양한 로봇에 대한 데이터 수집 포함). 넷째, 평가 과제들이 대부분 평균적인 조작 시나리오였고, 매우 복잡하거나 닫힌 환경(어려운 grasping, 물체 회전 등)에서는 더 많은 시너지가 필요할 수 있다. 실제로 4F(LEAP) 손에서는 물체 시각 추적이 어려웠을 때 성능이 떨어졌는데, 이는 시너지 제어와 인식 시스템의 통합 부재에 기인할 수 있다.
향후 연구로는 비선형 차원 축소 기법(예: GPLVM, 비선형 PCA)을 도입하거나, 시너지 공간에 촉각/힘 정보를 추가하여 동작을 개선할 수 있다. 또한 더 다양한 로봇 및 과제, 특히 곡면/변형 가능한(유연한 손) 로봇에 대한 확장도 필요하다. PCHands는 포즈 데이터를 사용하였으나, 향후 시각-촉각 멀티모달 데이터를 이용한 학습으로 확장하면 더욱 범용적일 것이다. 마지막으로, 실제 적용 측면에서 원격 조작(텔레오퍼레이션)이나 단일 모델로 여러 로봇 학습시키기 등 실용적 응용을 모색할 필요가 있다.
결론: 시너지 제어의 의의와 적용 가능성
PCHands는 서로 다른 자유도를 가진 로봇 손 사이에 공통의 손 자세 표현을 성공적으로 학습함으로써, 고차원 로봇 제어 문제를 저차원 시너지 공간으로 해결하는 새로운 길을 제시했다. 강화학습 실험에서 보듯 PCHands를 사용하면 학습 효율이 향상되고, 기존 시연 데이터를 로봇 간 전이하여 제어 정책을 빠르게 얻을 수 있다. 이는 예를 들어, 인간의 손 모션을 한 번만 녹화하여 로봇 손 여러 대로 전송하거나, 다양한 로봇을 하나의 통합된 방식으로 제어하는 데 유용할 것이다. 특히 고자유도 로봇 손을 다룰 때, 1~2개의 시너지 차원으로 복잡한 움직임을 표현할 수 있다는 점은 실용적 의미가 크다. 예를 들어 우주선이나 재난 로봇에 탑재된 다중 손 시스템을 단일 시너지 컨트롤러로 조작하는 등, 자유도 확장 문제에 대한 해결책이 될 수 있다.
종합하면, PCHands는 PCA 기반 시너지와 앤커 기반 kinematic 매핑을 결합하여 로봇 조작의 범용 표현을 제안하였다. 이 표현은 기구학적 차이를 흡수해 다양한 로봇에 일관된 제어를 가능케 하며, 특히 강화학습과 시연 학습에서 유의미한 성능 향상을 보였다. 물론 물체 상호작용, 비선형 특성 반영 등 남은 과제가 있지만, PCHands는 고자유도 로봇 제어 및 텔레오퍼레이션 분야에 새로운 가능성을 열었다. 앞으로 실제 로봇 시스템에 널리 적용되어 로봇 손 제어의 보편적 플랫폼 구축에 기여할 것으로 기대된다.