graph LR
subgraph "Surface Normal Discontinuity at Edge"
A["Face A<br/>Normal: ↑"] --> E["Edge<br/>(Discontinuity)"]
E --> B["Face B<br/>Normal: →"]
end
style E fill:#ff6b6b,stroke:#333,stroke-width:2px
📃Grasp’D 리뷰
grasp
dexterity
Differentiable Contact-rich Grasp Synthesis for Multi-fingered Hands
🔍 Ping. 🔔 Ring. ⛏️ Dig. A tiered review series: quick look, key ideas, deep dive.
- 🤖 Grasp’D는 high-dimensional multi-finger hand 모델을 위해 안정적이고 접촉이 풍부한 grasp를 합성하는 differentiable simulation 기반의 새로운 접근 방식입니다.
- ✨ 이 방법은 불연속적인 표면, 접촉 희소성 및 복잡한 최적화 지형과 같은 grasp synthesis의 난제를 해결하기 위해 coarse-to-fine SDF collision, leaky gradients, 그리고 Contact-Invariant Optimization에서 영감을 받은 문제 완화를 도입합니다.
- 📈 Grasp’D는 기존 analytic synthesis 방식 대비 4배 더 높은 contact area를 가진 grasp를 생성하며, 이는 향상된 stability와 물리적 타당성을 제공함을 실험적으로 입증합니다.

🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
Grasp’D는 고차원 다지(multi-fingered) 핸드 모델을 위한 현실적이고 안정적인 접촉-풍부(contact-rich) 그랩(grasp)을 합성하는 미분 가능한 시뮬레이션 기반 접근 방식입니다. 기존의 분석적(analytic) 그랩 합성 방식은 종종 깨지기 쉽고(brittle) 부자연스러운 결과를 낳으며, 특히 높은 접촉을 요구하는 파워 그랩(power grasp)을 생성하기 어렵다는 한계가 있습니다. Grasp’D는 이러한 한계를 극복하기 위해 그래디언트 기반 최적화를 활용하여 물리적으로 사실적이고 효율적인 고접촉 그랩 합성을 가능하게 합니다.
핵심 방법론 (Core Methodology)
Grasp’D는 미분 가능한 물리 시뮬레이션을 통해 그랩 품질을 측정하고 최적화합니다. 이는 샘플링 기반(sampling-based) 방법의 비효율성을 극복합니다. 미분 가능한 시뮬레이션을 그랩 합성에 적용할 때 발생하는 주요 과제와 해결책은 다음과 같습니다.
- 비평활 객체 형상 (Non-smooth Object Geometry):
- 과제: 객체의 모서리나 모서리와 같은 비평활한 부분에서는 접촉 힘의 그래디언트가 불연속적입니다. 이는 그래디언트 기반 최적화가 접촉 위치를 부드럽게 조정하는 것을 방해합니다.
- 해결책: SDF(Signed Distance Function)를 이용한 coarse-to-fine 평활화 접근 방식을 사용합니다. 초기 최적화 단계에서는 객체 표면을 r > 0 레벨 셋으로 정의하여 평활화되고 패딩된(padded) 버전을 사용합니다. 최적화가 진행됨에 따라 r 값을 점진적으로 0으로 줄여 원래의 상세한 표면 형상에 수렴하도록 합니다. 이는 최적화가 초기에는 더 부드러운 그래디언트를 따라 대략적인 그랩을 찾고, 나중에는 미세한 형상에 적합하게 조정될 수 있도록 돕습니다.
- 접촉 희소성 및 소실 그래디언트 (Contact Sparsity & Vanishing Gradients):
- 과제: 핸드와 객체가 접촉하지 않을 때, 아주 작은 핸드 포즈 변화는 접촉을 유발하지 않으며, 이로 인해 접촉 힘의 그래디언트가 0이 됩니다. 이는 최적화가 새로운 접촉을 형성하기 어렵게 만듭니다.
- 해결책: “leaky gradient” 개념을 도입합니다. 비접촉 상태의 접촉점(inactive contacts)에 대해서도 힘 계산에 그래디언트가 “누출”되도록 허용합니다. 식 (6)에서 볼 수 있듯이, \phi(x) \ge 0일 때도 그래디언트가 완전히 0이 되지 않도록 \alpha 계수를 사용하여 작은 값을 유지합니다. 이는 최적화가 비접촉 상태에서도 핸드가 객체를 향해 이동할 수 있는 유효한 그래디언트 신호를 제공합니다. \frac{\partial \lVert f_n \rVert}{\partial q} := \begin{cases} k_n \frac{\partial \phi}{\partial q} & \text{if } \phi(x) < 0 \\ \alpha k_n \frac{\partial \phi}{\partial q} & \text{otherwise} \end{cases} 여기서 f_n은 법선 힘, q는 핸드 포즈, \phi(x)는 침투 깊이(SDF 값), k_n은 법선 강성 계수, \alpha \in [0,1]는 누출 계수입니다.
- 험준한 최적화 지형 (Rugged Optimization Landscape):
- 과제: 많은 접촉이 활성화될 때, 핸드 포즈의 작은 변화가 접촉 힘에 큰 변화를 야기하여 그랩 메트릭의 최적화 지형이 매우 험준해질 수 있습니다.
- 해결책: Contact-Invariant Optimization (CIO) [68, 69]에서 영감을 받은 문제 완화(problem relaxation) 기법을 사용합니다. 문제를 두 가지 구성 요소로 분해합니다:
- Task Loss (L_{task}): 객체에 가해진 초기 속도를 성공적으로 저항하는 데 필요한 ‘원하는’ 또는 ‘처방된’ 접촉 힘(\hat{f}_c)을 찾습니다. 이 부분에서는 실제 핸드 포즈에서 발생하는 힘 대신 \hat{f}_c를 사용하여 시뮬레이션을 실행합니다. L_{grasp} = \frac{1}{M} \sum_{m=1}^{M} \lVert \dot{u}^{(T)}_o \rVert 여기서 \dot{u}^{(T)}_o는 M번의 시뮬레이션 후 객체의 최종 속도입니다. L_{task}는 이 L_{grasp}와 동일하게 계산되나, 접촉 힘 f_c 대신 \hat{f}_c를 사용합니다.
- Physics Violation Loss (L_{phys}): 현재 핸드 구성 q_h가 위에서 결정된 원하는 힘 \hat{f}_c를 실제로 제공할 수 있는지 측정합니다. 이는 핸드 포즈에서 발생하는 실제 접촉 힘 f_c(q_h)와 \hat{f}_c 간의 차이를 최소화합니다. L_{phys}(q_h, \hat{f}_c) = \lVert f_c(q_h) - \hat{f}_c \rVert 이 접근 방식은 물리적 위반(physics violation)을 제약 조건이 아닌 비용(cost)으로 처리하여 최적화 과정을 더 유연하게 만듭니다.
상세 구현 (Detailed Implementation)
- 강체 역학 (Rigid Body Dynamics): 시뮬레이션은 간단한 강체 역학을 사용하며, 핸드는 키네마틱(kinematic)으로, 객체는 다이내믹(dynamic)으로 모델링됩니다. 세미-임플리싯 오일러(semi-implicit Euler) 업데이트를 사용하여 상태를 업데이트합니다.
- 객체 모델 (Object Model): 객체는 이산화된 SDF(Discretized SDF)로 표현되며, 이는 Mesh에서 추출하거나 RGB-D 재구성에서 얻을 수 있습니다. SDF의 그래디언트는 접촉 법선을 제공합니다.
- 접촉 동역학 (Contact Dynamics): 접촉 힘은 페널티 기반(penalty-based)으로 계산되며, 법선 성분은 침투 깊이에 비례하고, 마찰 성분은 Coulomb 마찰 모델을 따릅니다.
- 추가 휴리스틱 손실 (Additional Heuristic Losses): 결과 그랩의 타당성을 높이기 위해 다음과 같은 손실 함수를 추가합니다:
- L_{range}(q_h): 핸드 조인트가 범위의 중앙에 위치하도록 장려합니다.
- L_{limit}(q_h): 핸드 조인트가 범위를 벗어나는 것을 페널티합니다.
- L_{inter}(q_h): 핸드 내부의 자기-교차(self-intersection)를 페널티합니다.
- 최적화 (Optimization): Modified Differential Multiplier Method [74]를 사용하여 L_{task} < C_{task}와 L_{limit} < C_{limit}를 제약 조건으로, L_{phys}, L_{range}, L_{inter}를 최소화합니다. Adamax [54] 옵티마이저를 사용합니다.
실험 및 결과 (Experiments and Results)
Grasp’D는 ShapeNet [11] 모델과 YCB RGB-D 데이터셋 [10]에서 재구성된 객체 Mesh에 대해 평가되었습니다.
- 평가 지표 (Evaluation Metrics): 접촉 면적(Contact Area, CA), 교차 부피(Intersection Volume, IV), CA/IV 비율, Ferrari-Canny ϵ 메트릭, Volume 메트릭, 시뮬레이션 변위(Simulation Displacement, SD)가 사용됩니다. SD는 PyBullet [16] 시뮬레이터를 사용하여 측정됩니다.
- ShapeNet 모델을 이용한 그랩 합성: ObMan [40] 데이터셋(GrastIt! [67] 기반 분석적 합성)과 비교했을 때, Grasp’D는 4배 더 높은 접촉 면적(42 cm^2 vs 9.4 cm^2)을 가진 그랩을 생성하며, 이는 훨씬 높은 안정성(SD 0.59 cm vs 1.95 cm)으로 이어집니다.
- RGB-D 입력으로부터의 그랩 합성: Grasp’D는 재구성된 객체 모델(불완전한 재구성 포함)에 대해서도 그랩 합성이 가능함을 입증했습니다. 이는 실제 환경의 RGB-D 입력으로부터 그랩을 예측하는 데 잠재력을 보여줍니다.
- Ablation Study:
- Problem Relaxation의 중요성: 완화된 문제 공식화가 없을 경우(Grasp’D w/o problem relaxation), 성능이 크게 저하되어 접촉 면적이 매우 낮아지는 등 모든 지표에서 불량한 결과를 보였습니다. 이는 이 기법이 Grasp’D의 성공에 핵심적임을 시사합니다.
- Coarse-to-fine Smoothing의 영향: coarse-to-fine 평활화가 없을 경우(Grasp’D w/o coarse-to-fine), 시뮬레이션 변위가 약 25% 증가했지만 다른 지표에는 큰 영향을 미치지 않았습니다. 이는 정량적으로는 미미하지만, 정성적으로는 그랩의 미세한 적합성(conformance)에 영향을 줍니다.
- Leaky Gradient의 필요성: leaky gradient가 없을 경우, 핸드가 초기화 시 객체에 접촉하지 않으면 그래디언트가 없어 최적화가 정체될 것이므로, 이 변형에 대한 실험은 수행되지 않았습니다.
결론 (Conclusions)
Grasp’D는 미분 가능한 시뮬레이션 기반의 그랩 합성 파이프라인으로, 다지 그리퍼에 대해서도 대규모의 타당하고 고접촉 그랩을 생성할 수 있습니다. 이 방식은 기존의 고전적인 그랩 알고리즘보다 정량적으로나 정성적으로 우수한 성능을 보여줍니다. PyTorch와 호환되어 기존 파이프라인에 쉽게 통합될 수 있으며, 합성 데이터를 기반으로 하는 비전 파이프라인의 그랩 예측 성능을 직접적으로 향상시킬 수 있습니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
🤖 “손가락 끝만 쓰지 말고, 손바닥도 써!”
여러분, 컵을 집어보세요. 아니, 정말로요. 지금 옆에 있는 컵을 한번 집어보세요.
어떻게 집으셨나요? 손가락 끝만 살짝 댔나요? 아니죠. 손바닥까지 감싸 쥐셨을 겁니다. 우리 인간은 수천 년간 이렇게 물건을 집어왔습니다. 그런데 로봇 손은요? 여전히 손가락 끝만 쓰고 있습니다. 왜 그럴까요?
오늘 소개할 Grasp’D는 바로 이 문제를 해결합니다. Toronto 대학, Vector Institute, NVIDIA, Samsung 연구진이 ECCV 2022에서 발표한 이 논문은, 로봇 그리핑 연구에서 “접촉면적”이라는 개념을 완전히 새롭게 정의했습니다.
📌 한 문장 요약
“미분 가능한 접촉 시뮬레이션을 통해, 기존 대비 4배 이상 넓은 접촉 면적의 안정적인 그립을 생성하는 방법”
🎯 왜 이 연구가 중요한가?
기존 방식의 한계: “손가락 끝 그립의 비극”
로봇 손으로 물체를 잡는 문제(Grasp Synthesis)는 생각보다 어렵습니다. 왜냐하면:
고차원 탐색 공간: 인간 손 모델(MANO)은 51개의 자유도를 가집니다. Allegro 로봇 손도 16개 관절이 있죠. 이 모든 조합을 탐색하는 건 사실상 불가능합니다.
단순화의 함정: 그래서 기존 연구들은 타협을 합니다:
- Eigengrasp: 손 자세를 주성분 분석(PCA)으로 저차원화
- 사전 정의된 접촉점: “손가락 끝만 쓰자!”
결과: 부자연스럽고 불안정한 “손가락 끝 그립”만 생성됨
아래 비교를 보세요:
| 구분 | 기존 방식 (ObMan/GraspIt!) | Grasp’D 방식 |
|---|---|---|
| 접촉 패턴 | Fingertip-only contact | Full palm + finger wrap |
| 접촉 면적 | ~9 cm² | ~43 cm² |
| 그립 스타일 | Precision grip | Power grip |
| 안정성 | Low (easily drops) | High (secure hold) |
핵심 통찰: “미분 가능성이 모든 것을 바꾼다”
Grasp’D의 핵심 아이디어는 심플합니다:
“시뮬레이션을 미분 가능하게 만들면, 경사 하강법으로 좋은 그립을 찾을 수 있다.”
블랙박스 최적화(시뮬레이티드 어닐링 등)는 저차원에서만 작동합니다. 하지만 경사 기반 최적화는 고차원에서도 효율적이죠. 문제는… 시뮬레이션이 미분 가능하지 않다는 것이었습니다. 이 논문은 그 장벽을 뚫었습니다.
🔬 기술적 깊이 파헤치기
자, 이제 진짜 재미있는 부분입니다. Grasp’D가 어떻게 작동하는지, 그리고 왜 기존 방식이 실패했는지 하나씩 뜯어봅시다.
1. 문제 정의: 그립 합성이란?
입력:
- 물체의 3D 형상 (메시 또는 SDF)
- 손 모델 (MANO 인간 손 또는 Allegro 로봇 손)
출력:
- 손의 기본 자세 (위치 + 회전)
- 각 관절의 각도
목표:
- 물체를 안정적으로 잡을 수 있는 자세 찾기
- 물리적으로 현실적 (관통 최소화)
- 접촉 면적 극대화
2. 왜 기존 방식이 실패하는가?
2.1 해석적 메트릭(Analytic Metrics)의 한계
GraspIt! 같은 기존 시뮬레이터는 Grasp Wrench Space (GWS) 분석을 사용합니다. Ferrari-Canny 메트릭(ε-metric)이 대표적이죠:
\epsilon = \min_{w \in \partial GWS} \|w\|
이건 “그립을 깨는 데 필요한 최소 힘”을 측정합니다. 문제는:
- 사전에 접촉점을 정해야 함: 수동으로 45개 정도의 접촉 후보점을 라벨링
- 마찰 없음 가정: 현실과 동떨어진 단순화
- 힘의 크기 균일 가정: 모든 접촉점에서 같은 힘
2.2 블랙박스 최적화의 차원의 저주
시뮬레이티드 어닐링이나 유전 알고리즘 같은 블랙박스 최적화는:
- 2-jaw 그리퍼 (6 DoF): OK ✓
- 다중 손가락 손 (16+ DoF): 💀
차원이 높아지면 탐색 공간이 지수적으로 폭발합니다. 그래서 Eigengrasp로 차원을 줄이는데… 이러면 power grasp 같은 다양한 그립을 발견할 수 없습니다.
3. Grasp’D의 해법: 세 가지 핵심 기법
Grasp’D 팀은 “미분 가능한 시뮬레이션”을 만들려다 세 가지 벽에 부딪혔고, 각각을 창의적으로 해결했습니다.
🧱 Challenge 1: 불연속적인 표면 기하학
문제: 정육면체의 모서리에서 접촉 법선이 불연속적으로 점프합니다. 미분 불가!
문제점: 모서리(Edge)에서 법선 벡터가 불연속적으로 점프 → 미분 불가능!
해결: Coarse-to-Fine SDF Smoothing
SDF(Signed Distance Function)를 사용하되, 처음엔 물체를 “부풀려서” 시작합니다:
\text{Surface}_r = \{x | \phi(x) = r\}, \quad r: 10\text{cm} \rightarrow 0
초기에는 물체가 마치 두꺼운 젤리처럼 보입니다. 모서리가 둥글죠. 최적화가 진행되며 점점 원래 형상으로 돌아갑니다. 이러면:
- 초반: 대략적인 그립 위치 탐색 (부드러운 표면에서)
- 후반: 세밀한 표면 형상에 맞춤
🧱 Challenge 2: 접촉 희소성 (Contact Sparsity)
문제: 손이 물체에 닿지 않으면 접촉력이 0이고, 따라서 그래디언트도 0입니다. 손을 물체 쪽으로 움직일 신호가 없어요!
graph LR
H["Hand<br/>(not touching)"] -.->|"Gap: no contact"| O["Object"]
subgraph "Problem"
F["Contact Force = 0"]
G["∂f/∂q = 0"]
D["Dead Gradient!"]
end
F --> G --> D
style D fill:#ff6b6b,stroke:#333,stroke-width:2px
문제점: 접촉이 없으면 힘도 0, 그래디언트도 0 → 최적화 방향을 알 수 없음!
해결: Leaky Gradient
LeakyReLU에서 영감을 받았습니다! 접촉하지 않아도 약간의 그래디언트를 흘려보냅니다:
\frac{\partial \|f_n\|}{\partial q} = \begin{cases} k_n \frac{\partial \phi}{\partial q} & \text{if } \phi(x) < 0 \text{ (침투)} \\ \alpha k_n \frac{\partial \phi}{\partial q} & \text{otherwise (비접촉)} \end{cases}
여기서 α = 0.1입니다. 비접촉 상태에서도 10%의 그래디언트가 전달되어, 손이 물체를 향해 움직일 수 있습니다.
이건 딥러닝의 “dying ReLU” 문제를 해결한 LeakyReLU와 정확히 같은 발상입니다!
🧱 Challenge 3: 험준한 최적화 지형
문제: 접촉 상태에서 손 자세의 작은 변화가 접촉력의 큰 변화를 야기합니다. 산등성이에서 로프 없이 걷는 느낌이죠.
해결: Contact-Invariant Optimization (CIO) 영감의 문제 완화
기존 접근:
“손 자세 q를 최적화해서 물체를 안정적으로 잡아라”
Grasp’D 접근:
- “어떤 힘 f̂_c가 물체를 안정화하는지 찾아라” (Task Loss)
- “그 힘을 실제로 제공하는 손 자세 q를 찾아라” (Physics Loss)
수식으로 표현하면:
\mathcal{L}_{task}(\hat{f}_c) = \|u_{obj}^{(T)}\| \quad \text{(목표 힘이 물체를 정지시키나?)}
\mathcal{L}_{phys}(q_h, \hat{f}_c) = \|f_c(q_h) - \hat{f}_c\| \quad \text{(손 자세가 목표 힘을 제공하나?)}
물리 법칙 위반을 “제약”이 아닌 “비용”으로 처리합니다. 이러면 최적화 지형이 훨씬 완만해집니다!
4. 시스템 아키텍처
전체 파이프라인을 정리하면:
flowchart TB
subgraph Input["📥 Input Stage"]
M["Object Mesh"] --> SDF["SDF Conversion<br/>(256³ grid)"]
SDF --> CSDF["Coarse SDF<br/>(r = 10cm padding)"]
Hand["Hand Model<br/>(MANO/Allegro)"]
end
subgraph Init["🎯 Initialization"]
AP["Sample approach point<br/>on object surface"]
OR["Set hand orientation<br/>(opposite to surface normal)"]
DIST["Set hand distance<br/>(10cm from approach point)"]
AP --> OR --> DIST
end
subgraph Opt["🔄 Optimization Loop (7000 steps)"]
R["1. Decrease r<br/>(linear schedule, 0 at step 5000)"]
SIM["2. Run 3 simulations<br/>with different initial velocities:<br/>(0,0,0), (±0.01,±0.01,±0.01) m/s"]
LOSS["3. Compute Losses:<br/>• L_task: stabilization<br/>• L_phys: force matching<br/>• L_range: joint centering<br/>• L_limit: joint limits<br/>• L_inter: self-penetration"]
UPDATE["4. Adamax update<br/>• Hand pose q_h<br/>• Target force f̂_c"]
R --> SIM --> LOSS --> UPDATE
UPDATE -.->|"repeat"| R
end
subgraph Output["📤 Output"]
GRASP["Optimized Grasp Pose"]
end
Input --> Init --> Opt --> Output
style Opt fill:#e8f5e9,stroke:#2e7d32
style GRASP fill:#bbdefb,stroke:#1976d2
5. 접촉력 모델링: 물리학의 아름다움
Grasp’D의 접촉력 계산은 단순하면서도 효과적입니다:
법선력 (Normal Force):
f_n = k_n \min(\phi(x), 0) \nabla\phi(x)
- \phi(x): SDF 값 (음수면 침투 상태)
- \nabla\phi(x): 표면 법선
- k_n: 법선 강성 계수 (1×10⁶)
마찰력 (Friction Force):
f_t = -\min(k_f \|v_t\|, \mu \|f_n\|) \hat{v}_t
Coulomb 마찰 모델입니다:
- v_t: 접선 방향 상대 속도
- \mu: 마찰 계수 (0.8)
- k_f: 마찰 강성 계수 (1×10⁸)
이 모든 연산이 미분 가능합니다. PyTorch autograd와 완벽 호환!
📊 실험 결과 분석
정량적 비교: ObMan vs Grasp’D
| 메트릭 | ObMan (Top 2) | Grasp’D (Top 2) | 개선율 |
|---|---|---|---|
| 접촉 면적 (cm²) | 9.4 | 43.0 | 4.6배 |
| 침투 체적 (cm³) | 1.28 | 5.70 | - |
| CA/IV 비율 | 7.37 | 7.55 | 유지 |
| ε 메트릭 | 0.470 | 0.501 | 6.6% |
| Volume 메트릭 | 13.6 | 14.4 | 5.9% |
| Sim. Disp. (cm) | 1.95 | 0.59 | 3.3배 |
핵심 포인트:
- 접촉 면적 4.6배 증가: 손끝 그립 → 파워 그립
- 시뮬레이션 변위 3.3배 감소: 훨씬 안정적인 그립
- CA/IV 비율 유지: 접촉이 늘었지만 침투 비율은 비슷
질적 비교: 눈으로 보는 차이
graph TB
subgraph ObMan["ObMan Grasp (GraspIt!)"]
direction TB
O1["👆 Fingertip-only contact"]
O2["❌ Unstable grip"]
O3["❌ Unnatural appearance"]
O4["Contact: ~9 cm²"]
end
subgraph GraspD["Grasp'D Grasp"]
direction TB
G1["🤲 Full palm + finger wrap"]
G2["✅ Highly stable grip"]
G3["✅ Human-like appearance"]
G4["Contact: ~43 cm²"]
end
style ObMan fill:#ffcdd2,stroke:#c62828
style GraspD fill:#c8e6c9,stroke:#2e7d32
시각적 차이: ObMan은 손가락 끝으로만 살짝 집는 반면, Grasp’D는 손바닥까지 감싸는 파워 그립을 생성합니다.
RGB-D 재구성에서의 검증
실제 응용을 고려해 YCB 데이터셋의 RGB-D 이미지에서 물체를 재구성하고 그립을 생성했습니다:
- 입력: 3개 카메라 × 5개 각도 = 15장 RGB-D 이미지 (전체의 2.5%)
- 과정: Poisson 표면 재구성 → SDF 변환 → Grasp’D
- 결과: 불완전한 재구성에서도 합리적인 그립 생성
이는 실시간 그립 예측의 가능성을 보여줍니다. 현재는 그립당 ~5분이 걸리지만, 하드웨어 발전과 알고리즘 최적화로 실시간화가 가능할 것입니다.
Ablation Study: 각 기법의 기여도
| 변형 | CA | SD | 비고 |
|---|---|---|---|
| Full Grasp’D | 42.6 | 0.41 | - |
| w/o Coarse-to-Fine | 43.2 | 0.55 | SD 34% 증가 |
| w/o Problem Relaxation | 6.1 | 3.82 | 완전 실패 |
핵심 발견: - Problem Relaxation이 가장 중요 (없으면 작동 안 함) - Coarse-to-Fine은 안정성에 기여 (34% SD 개선) - Leaky Gradient 없이는 테스트 불가 (초기화에서 접촉 없으면 진행 불가)
🎓 이론적 통찰: 왜 이게 작동하는가?
미분 가능 시뮬레이션의 철학
전통적인 시뮬레이션은 “정확성”에 집중합니다. 물리 법칙을 정밀하게 풀죠. 하지만 Grasp’D는 다른 질문을 합니다:
“정확하진 않아도 되니까, 올바른 방향을 가리키는 그래디언트를 줄 수 있나?”
이건 머신러닝에서 배운 교훈입니다. SGD는 정확한 그래디언트가 아니라 “방향만 대충 맞는” 그래디언트로도 수렴합니다. Grasp’D의 leaky gradient도 같은 철학입니다.
Contact-Invariant Optimization의 재발견
CIO는 원래 로봇 모션 플래닝을 위해 제안되었습니다. 핵심 아이디어는:
- 접촉 패턴을 미리 고정하지 않는다
- 물리 법칙 위반을 허용하되, 비용으로 처리한다
- 두 가지 관점으로 문제를 분해한다:
- 어떤 힘이 필요한가? (계획)
- 그 힘을 어떻게 생성하나? (실현)
Grasp’D는 이 철학을 그립 합성에 적용했습니다. 그리고 미분 가능 시뮬레이션이라는 새로운 도구 덕분에, 이 아이디어가 실제로 작동하게 되었습니다.
SDF의 미분 가능성
왜 메시 대신 SDF를 쓸까요?
| 특성 | Mesh-based Contact | SDF-based Contact |
|---|---|---|
| 표현 방식 | Discrete triangle boundaries | Continuous distance field |
| 거리 (d) | Discontinuous at edges | Continuous everywhere |
| 법선 (n) | Jumps between faces | Smooth (almost everywhere) |
| ∂d/∂x | Hard to define | Easy: ∂ϕ/∂x = ∇ϕ |
| 미분 가능성 | ❌ Problematic | ✅ Well-defined |
SDF의 그래디언트 ∇ϕ는 단위 벡터이고, 이는 곧 표면 법선입니다. 침투 깊이 d와 법선 n 모두 위치에 대해 미분 가능합니다!
🔮 미래 전망 및 한계
현재의 한계
- 속도: 그립당 ~5분 (RTX 2070). 실시간 적용 어려움
- 로컬 최소값: 초기화에 따라 결과가 달라짐
- 단일 물체 가정: 클러터 환경 미지원
- 정적 그립만: 동적 조작(in-hand manipulation) 미지원
발전 방향
- Fast-Grasp’D (ICRA 2023): 같은 팀이 10배 빠른 버전 발표. Grasp’D-1M 데이터셋 생성
- 학습 기반 초기화: 신경망이 좋은 초기값을 예측하면 최적화 수렴 가속
- 병렬화: GPU 병렬화로 다중 그립 동시 탐색
- 실시간화: 최적화 대신 신경망 예측 + 미분 가능 시뮬레이션 미세 조정
더 넓은 맥락: 미분 가능 시뮬레이션의 부상
Grasp’D는 더 큰 트렌드의 일부입니다:
- Brax: Google의 미분 가능 물리 엔진
- DiffTaichi: SIGGRAPH 2020
- Isaac Gym: NVIDIA의 병렬 시뮬레이터
- Nimble Physics: 해석적 그래디언트 계산
미분 가능 시뮬레이션은 로봇공학의 새로운 패러다임입니다. Grasp’D는 그 가능성을 그립 합성에서 보여주었습니다.
🛠️ 실무자를 위한 핵심 테이크어웨이
이 논문을 당장 적용하고 싶다면:
- 코드 공개: github.com/dylanturpin/graspd
- PyTorch 호환: 기존 파이프라인에 쉽게 통합
- 범용 손 모델 지원: MANO (인간), Allegro (로봇) 모두 OK
구현 팁:
# 핵심 하이퍼파라미터 (논문 기준)
config = {
'normal_stiffness': 1e6, # k_n
'friction_stiffness': 1e8, # k_f
'friction_coeff': 0.8, # μ
'leaky_alpha': 0.1, # 비접촉 그래디언트 비율
'smoothing_radius': 0.1, # 초기 SDF 패딩 (미터)
'smoothing_steps': 5000, # 0까지 선형 감소
'total_steps': 7000,
'optimizer': 'Adamax',
'lr_pose': 3e-3,
'lr_force': 1e-2,
}연구 확장 아이디어:
- RL과 결합: 미분 가능 시뮬레이션 → policy gradient 개선
- 촉각 센서 통합: 접촉력 피드백으로 closed-loop 제어
- Sim-to-Real: 합성 그립으로 실제 로봇 학습
- 멀티 손가락 협조: 양손 조작으로 확장
📚 관련 연구 맥락
이 논문이 인용하는 핵심 논문들:
| 논문 | 기여 | Grasp’D와의 관계 |
|---|---|---|
| GraspIt! (Miller & Allen, 2004) | 해석적 그립 합성 | 비교 대상 (baseline) |
| ObMan (Hasson et al., 2019) | 손-물체 포즈 추정 데이터셋 | 비교 대상 (baseline) |
| Contact-Invariant Optimization (Mordatch et al., 2012) | CIO 프레임워크 | 핵심 영감 |
| MANO (Romero et al., 2017) | 파라메트릭 인간 손 모델 | 손 모델로 사용 |
이 논문을 인용한 후속 연구들:
| 논문 | 기여 |
|---|---|
| Fast-Grasp’D (ICRA 2023) | 10배 빠른 버전 + 1M 데이터셋 |
| DexGraspNet (CVPR 2023) | 대규모 덱스터러스 그립 데이터셋 |
| UniDexGrasp (CVPR 2023) | 범용 덱스터러스 그립 정책 |
🎬 결론: 단순함의 승리
Grasp’D의 진정한 아름다움은 기존 아이디어들의 창의적인 조합에 있습니다:
- SDF 기반 접촉 (새로운 건 아님)
- 경사 기반 최적화 (새로운 건 아님)
- Leaky gradient (딥러닝에서 빌려옴)
- CIO 스타일 완화 (모션 플래닝에서 빌려옴)
각각은 알려진 기법이지만, 그립 합성이라는 문제에 맞게 조합하고 튜닝한 것이 이 논문의 기여입니다.
그리고 결과는 놀랍습니다: 4배 넓은 접촉 면적, 3배 높은 안정성.
이것이 좋은 연구의 본질입니다. 복잡한 새 기법을 발명하는 것이 아니라, 기존 도구들을 문제에 맞게 재조합하는 것. 뉴턴이 “거인의 어깨 위에 서 있다”고 했듯이, Grasp’D는 미분 가능 물리학, 딥러닝, 최적화 이론이라는 거인들의 어깨 위에 서서, 로봇 그리핑의 새 지평을 열었습니다.
📖 참고문헌
- Turpin, D., et al. “Grasp’D: Differentiable Contact-rich Grasp Synthesis for Multi-fingered Hands.” ECCV 2022.
- Miller, A. T., & Allen, P. K. “Graspit! A versatile simulator for robotic grasping.” IEEE Robotics & Automation Magazine, 2004.
- Hasson, Y., et al. “Learning joint reconstruction of hands and manipulated objects.” CVPR 2019.
- Mordatch, I., et al. “Contact-invariant optimization for hand manipulation.” Eurographics/SIGGRAPH Symposium on Computer Animation, 2012.
- Romero, J., et al. “Embodied hands: Modeling and capturing hands and bodies together.” SIGGRAPH Asia, 2017.
⛏️ Dig Review
⛏️ Dig — Go deep, uncover the layers. Dive into technical detail.
문제 설정 및 기존 접근법의 한계
로봇이나 가상 인간의 다중 손가락 파지(grasp)를 생성하는 것은 매우 어려운 문제입니다. 사람은 일상적으로 다양한 물체를 쉽게 쥐지만, 이는 시각 정보 처리와 손의 정교한 움직임이 결합된 복잡한 인지-운동 제어 시스템 덕분입니다. 기계에게 이러한 능력을 주는 방법으로 그립 합성(grasp synthesis) 연구가 발전해왔습니다. 일반적으로 그립 합성은 물체의 완전한 기하학 정보(예: 삼차원 메쉬)가 주어졌다고 가정하며, 그립 품질 지표(grasp quality metric)를 최적화하여 손의 자세를 찾는 방식으로 이루어집니다.
전통적으로 사용된 두 가지 접근은 해석적(analytic) 지표와 시뮬레이션 기반 지표입니다. 해석적 지표의 예로 로봇공학에서 널리 쓰이는 epsilon metric이 있는데, 이는 파지가 물체에 가하는 접촉 힘들의 조합으로 깨뜨릴 수 없는 최소 추가 힘의 크기를 측정합니다. 해석적 지표들은 계산이 빠르지만 현실 세계와의 오차가 크고 접촉이 드문dex[footnote?] 파지에는 부적합한 한계가 있습니다. 반면 시뮬레이션 기반 지표는 실제로 물체를 잡은 후 힘을 가하거나 흔들어 보는 가상 실험으로 파지의 성공 여부를 평가하기 때문에 물리적 정확성이 높지만, 계산 비용이 많이 듭니다. 더욱이, 이들 기존 접근에서는 해석적 지표나 시뮬레이터 모두 미분 가능하지 않기 때문에, 그립 자세를 찾는 최적화는 주로 블랙박스 방식의 탐색으로 이루어져 왔습니다. 간단한 형태의 그리퍼(예: 평행 턱 그리퍼)의 경우 파지 자세 공간이 저차원이라 블랙박스 최적화도 몇 단계의 시도로 충분할 수 있지만, 인간 손과 같은 고자유도 다관절 손의 경우 탐색 공간이 거대해져서 기존 블랙박스 기법은 계산적으로 불가능에 가까워집니다.
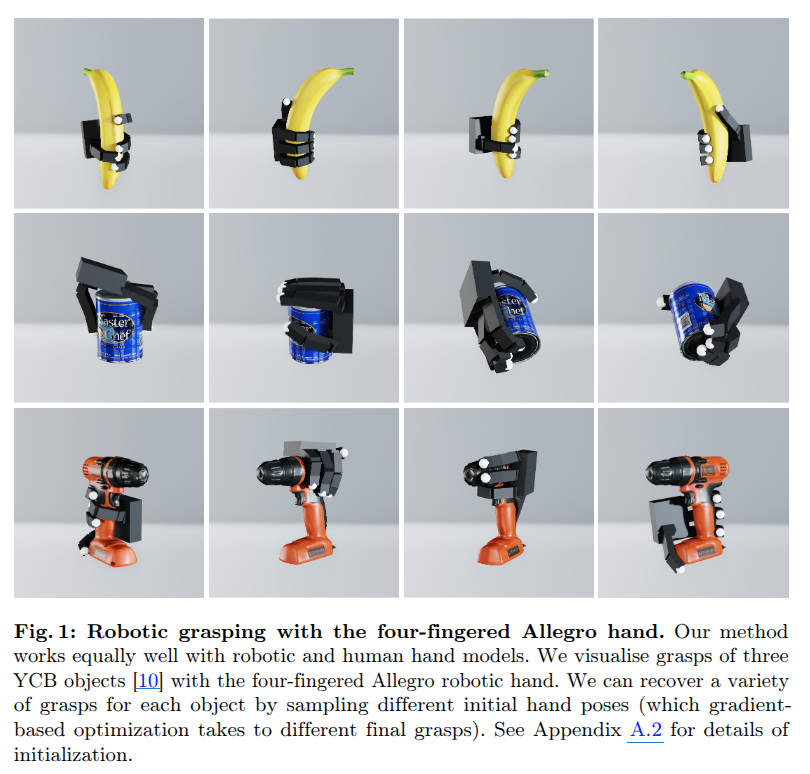
이에 따라 연구자들은 문제를 완화하기 위해 다양한 제약과 단순화 가정을 도입하곤 했습니다. 예를 들어 유명한 GraspIt! 소프트웨어에서는 손의 자유도를 줄이기 위해 eigengrasp라 불리는 손가락 공용 좌표(주성분 형태)를 사용하거나, 물체의 특정 지점에 미리 정해진 접촉 지점을 두어 손이 그 점들을 잡도록 유도하는 방식을 취했습니다. 그러나 이러한 가정들은 탐색 공간 차원을 낮춰주긴 해도 결과적으로 찾을 수 있는 파지의 다양성과 현실성을 떨어뜨립니다. 실제로 기존의 해석적 합성 방법으로 생성된 파지 자세는 주로 손가락 끝 몇 군데로만 물체를 간신히 집는 형태가 많고, 사람 손이 물체를 감싸 쥘 때 나타나는 넓은 면적의 접촉은 재현되지 않는 경우가 많았습니다. 그림 1은 이러한 한계를 잘 보여줍니다. 왼쪽의 기존 방법(예: ObMan/GraspIt! 기반 합성)은 물체 표면에 손가락 끝만 닿는 성긴 접촉을 가지지만, 오른쪽의 Grasp’D 방법은 손바닥과 손가락 전체로 물체를 감싸 안정적이고 넓은 접촉 면적을 확보한 파지를 만들어냅니다. 이러한 드문 접촉의 핀치 그립에 의존하는 기존 방법은 파지 안정성이 낮고 부자연스러워 실제 사용에 한계가 있었습니다.
Grasp'D: 미분가능한 그립 합성 최적화 프레임워크
이러한 배경에서 Grasp’D (Grasp “Differentiable”)는 복잡한 다관절 손의 파지 동작을 보다 사실적이고 안정적으로 생성하기 위해 미분가능 시뮬레이션(differentiable simulation)을 활용하는 새로운 최적화 프레임워크를 제안합니다. 핵심 아이디어는 파지의 품질을 평가하는 물리 시뮬레이션 과정을 미분가능하게 구성하여, 이에 대한 그래디언트(gradient)를 이용해 손의 관절 각도를 직접 연속적으로 최적화하는 것입니다. 이렇게 하면 표준 해석적 지표나 기존 시뮬레이터처럼 일일이 샘플을 시도해보는 블랙박스 탐색 대신, 기울기 정보를 따라가는 효율적인 탐색이 가능해집니다. 결과적으로 Grasp’D는 고차원 공간에서도 시도 횟수를 줄이면서도 현실성 높은 파지를 찾아낼 수 있으며, 물리 시뮬레이션 기반 평가의 장점(물리적 타당성, 확장성 등)을 모두 제공할 수 있습니다.
Grasp’D 프레임워크의 전체 구조는 다음과 같습니다. 먼저 물체와 손의 3D 모델(메쉬 혹은 Signed Distance Function 표현 등)이 주어지면, 손 모델을 물체 근처의 임의의 초기 자세로 배치합니다. 그런 다음 미분가능 물리 시뮬레이션을 이용해 해당 자세의 파지 안정성을 평가하는 그립 Metric(목적 함수)을 계산합니다. Grasp’D에서 사용된 그립 평가지표는 시뮬레이션을 통해 정의되는데, 간단히 말해 물체에 작은 교란(force나 속도)을 주었을 때 물체가 손에서 빠져나가는 정도를 나타내는 값입니다. 이 값이 작을수록 (즉 물체의 최종 움직임이 미미할수록) 파지가 안정적이라고 볼 수 있습니다. 중요한 것은 이 시뮬레이션 과정이 연속적 함수처럼 미분가능하도록 설계되어 있어, 손가락 관절각 등에 대한 이 그립 Metric의 그래디언트를 얻을 수 있다는 점입니다. 따라서 손의 자세 매개변수들을 이 그래디언트에 따라 조금씩 조정하면서 반복적으로 최적화(gradient descent)하면 파지 품질이 향상됩니다. 실제로 Grasp’D 파이프라인을 통해 초기에는 물체를 제대로 잡지 못했던 손이 점진적으로 손가락을 물체에 밀착시키고 안쪽으로 감으면서, 최종적으로 안정적이고 접촉면적이 넓은 파지 자세를 완성하게 됩니다.
그림 1: Grasp’D 파이프라인을 통해 손이 물체를 잡아가는 과정 예시. 초기에는 손가락 끝만 접촉하지만, 최적화가 진행될수록 손가락과 손바닥을 활용해 물체를 깊숙이 감싸 쥐며 접촉 면적과 안정성을 높여나간다.
Grasp’D의 중요한 특징은, 파지가 발생하는 모든 접촉면을 제한하지 않고 풀어둔다는 것입니다. 손 모델의 표면(손바닥, 손가락 마디 등) 전체가 잠재적인 접촉 지점으로 활용되며, Grasp’D는 이 수천 개에 달하는 접촉 후보 지점들을 동시에 고려하면서 최적화합니다. 이는 기존 방법들이 접촉점을 몇 군데 미리 정해두거나 손가락 자세 자유도를 인위적으로 줄였던 것과 대조적입니다. Grasp’D는 이러한 간소화 가정 없이도 광범위한 접촉을 활용한 파지를 찾아내며, 이는 곧 고접촉-파워 그립(high-contact power grasp)을 가능하게 합니다. 결국 이 프레임워크를 통해 인간 손뿐 아니라 로봇 손 등 임의의 다관절 손 모델에 대해, 주어진 물체를 물리적으로 현실성 있고 안정적으로 잡는 자세를 미분가능 최적화로 구할 수 있게 되었습니다.
한편 Grasp’D는 학습 기반(learning-based) 접근과는 달리 사전 학습 데이터나 신경망 모델이 필요하지 않은 최적화 경로를 취하고 있습니다. 이는 몇 가지 장점을 지니는데, 첫째로 대규모의 파지 데이터셋을 만들고 학습시키는 번거로운 과정을 피할 수 있습니다. 인간의 파지 동작을 캡처하거나 시뮬레이터로 수십만 가지 파지를 생성하여 학습시키는 기존 방법들과 달리, Grasp’D는 물체의 3D 형태만 주어지면 그 자리에서 최적화를 통해 파지를 찾아내므로 새로운 물체나 손에 대해서도 범용적으로 적용할 수 있습니다. 둘째로, 물리 시뮬레이션에 기반하므로 훈련 데이터 분포 밖의 경우에도 물리 법칙에 맞는 결과를 얻을 가능성이 높고, 손과 물체의 임의 조합에 대해 제약 없이 동작합니다. 마지막으로, 학습되지 않은 최적화 경로는 해석적 조정이 용이하다는 이점이 있습니다. 예를 들어 잡고자 하는 물체의 재질에 따라 마찰계수를 다르게 설정한다거나 (유리는 낮은 마찰, 고무는 높은 마찰), 손의 관절 가동 범위를 제한하는 등의 물리적 파라미터 변경을 곧바로 적용할 수 있습니다. 학습된 모델이라면 이런 변경에 재학습이 필요할 수 있지만, Grasp’D 최적화는 물리 모델만 바꾸면 즉시 반영되므로 확장성(extensibility)이 높습니다. 다만 이런 비학습적 접근의 단점으로는 개별 파지를 찾는데 시간이 걸려 실시간으로 사용하기에는 아직 느리다는 점이 있습니다 (논문 저자들에 따르면 물체 하나당 약 5분 정도 최적화가 걸립니다). 하지만 오프라인에서 파지 데이터셋을 대량 생성하거나, 또는 향후 시뮬레이션 및 최적화 기술의 속도가 개선된다면 충분히 활용 가능한 수준이며, 물리 기반의 정확성을 고려하면 값진 trade-off라고 할 수 있습니다.
접촉 모델링과 손-물체 상호작용의 수치적 정식화
Grasp’D의 심장은 미분가능 물리 시뮬레이터입니다. 특히 손-물체 접촉(contact)을 어떻게 모델링하고 미분가능하게 만들었는지가 핵심인데, 이를 위해 Grasp’D는 물체의 표면을 Signed Distance Field (SDF) 형태로 표현하여 충돌을 감지하고 접촉력을 계산합니다. SDF란 임의의 점 x에 대해 물체 표면까지의 최단 거리를 부호와 함께 제공하는 함수 \phi(x)로, 물체 내부의 점이면 음수, 외부면 양수 값을 갖습니다. 이 함수의 음영(signed) 덕분에 x가 물체 표면 안쪽으로 파고든 깊이(penetration depth)를 나타낼 수도 있고, 기울기 \nabla \phi(x)는 해당 점에서의 표면 법선 방향(normal direction)을 가리킵니다. Grasp’D는 이 성질을 이용해 접촉력을 계산하는 연속함수를 구성합니다.
간략히 말해, 손의 각 잠재적 접촉 지점(손의 메시 버텍스 등)을 x_h \in X_h라 할 때, 그 점의 현재 SDF 값 \phi(x_h)를 계산합니다. 만약 \phi(x_h) < 0 (즉 손이 그 지점에서 물체를 침투하여 겹쳐있는 경우)라면 접촉이 발생한 것으로 보고 법선방향 반발력 f_n을 생성합니다. Grasp’D에서는 이를 벌점(penalty) 기반 모델로 구현하여, 예를 들어 스프링-댐퍼처럼 f_n = k_n \min(\phi(x_h), 0) \nabla\phi(x_h)의 형태로 침투 깊이에 비례하는 탄성복원력을 계산합니다. 여기서 k_n은 법선 방향 강성 계수로, 매우 크게 주어지면 두 물체가 실제로 겹치지 않도록 강한 힘으로 밀어내는 효과가 있습니다. 한편 \phi(x_h) \ge 0이면 (손이 아직 닿지 않은 경우) f_n = 0이 됩니다. 이렇게 계산된 법선력 f_n은 손이 물체 표면을 미는 힘이고, 물체를 잡아 버티는 기본적인 역할을 합니다.
하지만 마찰 없는 법선력만으로는 실제 파지를 재현할 수 없으므로, Grasp’D는 마찰력 f_t도 모델링합니다. 접촉 지점에서 손과 물체 사이에 상대 속도(또는 예상 미끄럼 속도) \mathbf{v}_t를 계산하고, 쿨롱 마찰 법칙에 따라 탄젠셜(tangential) 방향의 저항력 f_t를 부여합니다. 수식으로는 f_t = -\min(k_f \Vert \mathbf{v}_t \Vert,\\; \mu \Vert f_n \Vert)\\, \hat{\mathbf{v}}_t 로 표현되며, 여기서 k_f는 탄젠셜 힘 게인(마찰 강성), \mu는 마찰계수, \hat{\mathbf{v}}_t는 탄젠셜 속도의 방향 단위 벡터입니다. 이 식은 작은 미끄럼에 대해서는 마찰력이 k_f에 비례하여 증가하지만 어느 임계치 이상 (즉 쿨롱 마찰 한계 \mu \Vert f_n \Vert)에서는 더 이상 증가하지 않고 슬립이 발생함을 나타냅니다. 이러한 마찰 모델을 도입함으로써 Grasp’D 시뮬레이션은 물체를 쥔 손가락이 미끄러지지 않고 버틸 수 있는 한계를 표현할 수 있고, 파지의 안정성을 보다 현실적으로 평가할 수 있습니다. 더욱이 이전의 연구와 달리 Grasp’D는 마찰계수를 0이 아닌 임의의 값으로 둘 수 있고, 접촉 지점마다 서로 다른 힘이 발생하도록 허용하여 실제 물리와 더 가깝습니다 (기존 일부 연구는 해석적 단순화를 위해 모든 접점에 동일한 힘이 걸린다고 가정하거나 마찰이 없다고 두었음).
Grasp’D 시뮬레이터는 이러한 접촉 모델을 통합하여, 반복적 시간 스텝 물리엔진처럼 손과 물체의 상호작용을 계산합니다. 구체적으로 손과 물체의 상태를 합친 구성 벡터 q를 정의하고, 그 시간미분 q\' (속도)와 q\'\' (가속도)를 고려합니다. 시스템의 운동 방정식은 관절의 작용으로 인한 가속도(H(q)u)와 접촉/외력으로 인한 가속도가 합쳐져 q\'\'를 결정하는 형태로 세워지며, 이를 \text{(질량행렬)} \times q\'\' = f_c + f_{\text{ext}}와 같은 식으로 표현합니다. 논문에서는 이를 반-명시적(semi-implicit) 오일러 적분 방식으로 풀어 1회 시뮬레이션 스텝의 상태 변화를 계산했다고 합니다. 간단히 말해, 현재 손의 자세 q_h에서 물체에 초기 교란(예: 속도)을 주고 아주 짧은 시간 \Delta t (예: 10^{-5}초) 동안 시뮬레이션하면, 접촉 모델에 의해 물체를 잡는 힘이 발생하고 그에 따라 물체의 속도가 변화합니다. Grasp’D의 그립 품질 척도(metric) L_{\text{grasp}}는 이 시뮬레이션 결과 물체의 남은 속력으로 정의됩니다 – 즉 L = \Vert \mathbf{v}_{\text{object}}(T) \Vert로, 시뮬레이션 종료 시점 T에 물체가 얼마나 움직이고 있는지를 나타냅니다. 튼튼한 파지일수록 물체가 잘 고정되어 속도가 0에 가까워야 하므로, Grasp’D는 이 속도의 크기를 최소화하는 것을 목표로 손의 자세를 최적화하게 됩니다. (참고로 안정성 평가의 신뢰성을 높이기 위해 하나의 초기 교란이 아니라 여러 방향의 무작위 초기 속도를 물체에 주어 여러 번 시뮬레이션한 후 평균 속도를 쓰기도 합니다.)
Grasp’D의 모든 계산(충돌 판정, 접촉력 계산, 물체 운동량 변화 등)은 연속적 수식으로 표현되어 있어, 입력인 손 관절각 q_h에 대해 미분가능합니다. 이는 SDF 기반 충돌 모델 덕분인데, \phi(x)와 \nabla \phi(x) 등이 매끄럽게 정의되므로 접촉력이 사실상 q_h의 미분가능한 함수로 표현되기 때문입니다. 단, 마찰 모델의 min 연산이나 max(0, φ) 같은 부분은 수학적으로 매끄럽지 않을 수 있지만, 논문에서는 이를 적절히 처리하여 자동 미분이 가능하도록 구현했다고 설명합니다. 이렇게 해서 그립 품질 함수 L(q_h)의 그래디언트 \nabla_{q_h} L를 얻을 수 있고, 이 정보를 활용해 손의 자세를 갱신합니다. 최적화에는 표준적인 Adam (정확히는 Adamax) 옵티마이저가 사용되었으며, 학습률 등의 세부 사항은 부록에 제시되어 있습니다. 중요한 점은, 손-물체 접촉의 모든 면면이 수치적으로 공식화되어 미분 가능하게 처리되었다는 것으로, 이것이 Grasp’D의 혁신의 핵심이라 할 수 있습니다.
최적화 과정의 핵심 기법들: 난제 대응 및 목적함수 구성
미분가능한 시뮬레이터를 마련했다 하더라도, 곧바로 그라디언트 기반 파지 최적화를 실행하면 여러 실용적인 난관에 부딪히게 됩니다. Grasp’D 논문은 이러한 문제들을 잘 분석하고 세 가지 주요 아이디어로 해결하고 있는데, 이를 하나씩 소개하겠습니다:
(1) 비연속적 지형 완화: 표면 매끄럽게 하기 – 실제 물체의 메쉬는 모서리나 뾰족한 부분에서 SDF의 기울기가 불연속적으로 변하며, 이로 인해 접촉력이 갑자기 튀는 문제가 있습니다. 이러한 비미분적 지형 (nondifferentiable landscape)에서는 gradient descent가 제대로 진행되지 않을 수 있습니다. Grasp’D는 이를 해결하기 위해 계층적(Coarse-to-fine) 최적화 전략을 도입했습니다. 초반에는 물체 표면을 부드럽게 뭉뚱그린 형태로 간주하고 손을 최적화하다가, 점차 실제 세부 형상에 가깝게 해상도를 높여가는 방식입니다. 구현상으로는 원본 SDF를 약간 확장(thicken)하고 매끄럽게 만든 퍼지 표면부터 시작하여, iteration이 진행됨에 따라 그 두께를 줄여 원래 표면에 수렴시키는 과정을 거칩니다. 이렇게 하면 초기에는 손이 약간 둥근 형태의 물체를 잡기 때문에 접촉면에서 gradient가 연속적으로 변하고, 최적화가 진행될수록 실제 모서리나 세부까지 대응하면서 손가락이 미세 조정됩니다. 이를 통해 비연속적인 표면으로 인한 그래디언트 함정을 피할 수 있었습니다. 요약하면, 처음엔 물체를 매끈한 공처럼 취급하여 손을 위치시키고, 점차 실제 모양을 드러내는 기법이라 볼 수 있습니다 (사실 이 아이디어는 딥러닝의 LeakyReLU가 죽은 뉴런 문제를 완화하는 것과 비슷한 맥락으로 볼 수도 있습니다).
(2) 접촉 희소성 대응: 그래디언트 누설(leak) – 최적화를 시작할 때 손이 물체에 아예 닿아있지 않으면, 접촉력이 0이므로 목적함수 L에 대한 그래디언트도 0입니다. 그러면 손이 어디로 움직여야 할지 신호가 없으므로 최적화가 시작부터 멈춰버릴 수 있습니다. 이를 방지하려면 최소한 손이 물체와 약간의 접촉 또는 간섭이 있는 상태에서 시작해야 하는데, 처음부터 무리하게 깊이 파고들게 하면 또 비현실적인 파지가 될 수 있습니다. Grasp’D는 이 딜레마를 “의도적 그래디언트 누설” 기법으로 풀었습니다. 손이 아직 닿지 않은 접촉 후보 지점들에 대해서도 미약하지만 방향성을 가진 그래디언트를 제공하도록 한 것입니다. 구체적으로, 원래는 \phi(x) \> 0 (충돌 없음)일 때 f_n = 0이고 \partial f_n/\partial q_h = 0이어야 하나, Grasp’D는 이 경우에 편미분 값을 0이 아닌 작은 값으로 설정하여 손이 물체를 향해 움직이도록 유도합니다. 이는 딥러닝에서 입력이 0일 때 기울기가 사라지는 ReLU 대신 Leaky ReLU를 쓰는 것에 비유되며, 일종의 “가짜 신호”를 흘려보내 손이 접촉을 만들게 하는 트릭입니다. 이 기법 덕분에 손이 초기엔 물체에 안 닿아 있더라도 최적화 과정에서 물체를 향해 손을 뻗도록 유도할 수 있습니다. (물론 이 그래디언트는 어디까지나 편향된 값이므로, 실제 접촉이 생기면 정상적인 물리 기반 그래디언트로 대체됩니다.)
(3) 러기드 랜드스케이프 대응: 문제 완화(relaxation) – 손이 물체와 여러 점에서 닿기 시작하면, 손 자세의 작은 변화가 어떤 접점을 만들거나 끊어버리고 접촉력 분포를 크게 바꾸어버릴 수 있습니다. 이러한 러기드(rugged)한 최적화 지형에서는 gradient가 급변하여 안정적인 수렴이 어렵습니다. Grasp’D는 여기서 Contact-Invariant Optimization (CIO)이라는 이전 연구 아이디어를 응용하여, 제약을 완화한 대안 문제를 최적화한 후 다시 실제 문제로 가져오는 방식을 취했습니다. 핵심은, 손이 가할 수 있는 접촉력을 직접 최적화 변수로 도입하는 것입니다. 즉 원래 문제는 “손의 자세 q_h를 찾아서 물체를 안정적으로 잡아라”인데, 이를 “어떤 접촉 force 분포 \mathbf{f}_c를 만들어내면 물체를 잡을 수 있을 것인가”와 “그 force를 실제로 만들어낼 수 있는 손 자세 q_h는 무엇인가”라는 두 하위 문제로 쪼갭니다. 이를 위해 손의 접촉점마다 가상의 희망 접촉력 \mathbf{f}_c^d (desired contact force)를 변수로 둡니다.
- 첫 번째 하위 목적 L_{\text{task}}(\mathbf{f}*c^d)는 이 가상의 힘들이 물체의 초기 움직임을 잘 막아내는지를 측정합니다. 이는 앞서 정의한 L*}}와 거의 동일하지만, 실제 손이 주는 힘 대신 이상적인 \mathbf{f*c^d를 이용해 계산한 과제 수행 오차라고 보면 됩니다.
- 두 번째 목적 L*_c^d와 똑같은 힘을 낼 수 있다면 이 값은 0이 될 것이고, 손가락 위치가 그 힘들을 못 만들어내면 차이가 커집니다. 최종적으로 Grasp’D는 }}(q_h, c^d)$는 현재 손 자세 q_h에서 실제로 발생하는 접촉력 분포와 \mathbf{f}_c^d의 차이를 재는 값입니다. 손이 \mathbf{f**L{} + L_{}$**라는 복합 목적함수를 최소화하도록 설정됩니다. 그렇게 하면 최적화 과정에서 한편으로는 물체를 붙잡는 데 충분한 (그리고 가능한 한 작은) 힘 \mathbf{f}_c^d를 찾아내고, 동시에 그 힘을 낼 수 있도록 손가락들을 움직이는 균형을 이루게 됩니다. 직관적으로, 손이 물체를 완벽히 잡고 있다면 \mathbf{f}_c^d와 실제 접촉력이 일치하여 두 항이 모두 0에 가까워질 것이고, 손이 아직 덜 잡혔을 땐 \mathbf{f}_c^d를 더 키우거나 손 자세를 바꿔야 두 값을 줄일 수 있을 것입니다.
- 이렇게 물리적 제약(접촉 힘의 평형 조건 등)을 위배하는 상황을 벌점(cost)으로 처리함으로써, 최적화가 좀 더 관대하게 진행될 수 있습니다. 처음엔 손이 충분히 안 잡고 있어도 가상의 힘을 키우는 방향으로 해법을 찾고, 그 힘을 낼 수 있게 손을 따라 움직이는 식입니다. 마지막에 가서는 \mathbf{f}_c^d가 실제 손의 힘과 일치하면서 물리적으로 유효한 파지로 수렴하게 됩니다. Grasp’D 실험 결과 이 완화기법(problem relaxation)을 쓰는 것이 성능 향상에 매우 중요했고, 만약 이 부분을 생략하면 최적화가 거의 실패하며 접촉 면적을 충분히 활용하지 못하는 열악한 파지들이 나왔다고 합니다. 그만큼 복잡한 접촉 문제에서는 해를 서서히 개선할 수 있는 다리 역할이 필요했고, Grasp’D는 추가 변수와 코스트를 통해 이를 구현했습니다.
위 세 가지 기법은 Grasp’D의 미분가능 최적화 프레임워크를 실용화하는 데 기여한 핵심 요소들입니다. 덕분에 Grasp’D는 접촉 지형의 불연속성, 초기 접촉 부재, 그리고 다중접점으로 인한 불안정 기울기 문제를 모두 극복하고 안정적인 수렴을 이뤄낼 수 있었습니다. 실제 최적화는 수백 회의 iteration으로 진행되며, 점차 L_{\text{task}}와 L_{\text{phys}} 값이 모두 감소하면서 손가락들이 물체를 단단히 움켜쥐는 모양새로 변합니다. 최종적으로 얻어진 손 자세 q_h가 바로 우리가 찾는 접촉이 풍부하고 안정적인 파지입니다.
시뮬레이션 결과 및 비교 평가
Grasp’D의 효과를 입증하기 위해 저자들은 다양한 시뮬레이션 실험을 수행했습니다. 우선 인간 손 모델에 해당하는 MANO 모델를 사용하여, ShapeNet 데이터셋의 57개 물체에 대해 파지를 생성하고 기존 방법과 비교했습니다. 물체들은 병(bottle), 그릇(bowl), 카메라, 캔, 휴대폰, 단지(jar), 칼, 리모컨 등 8개 카테고리에 걸쳐 다양하게 포함되었으며, 각 물체에 대해 Grasp’D를 이용해 여러 개의 파지 자세를 생성한 후 품질 지표를 측정했습니다. 또한 로봇 손 모델로는 대표적인 4손가락 로봇 핸드인 알레그로 핸드(Allegro hand)를 사용하여 동일한 과정을 거쳤습니다. 비교 대상 기준 방법(baseline)으로는, 앞서 언급한 해석적 기법을 사용한 파지 합성의 예로 GraspIt! EigengraspPlanner를 통한 결과나, 그것을 활용해 생성된 합성 파지 데이터셋인 ObMan 등을 사용했습니다. 이들은 손가락 끝 위주의 접촉만 있는 파지들로 간주할 수 있습니다.
평가지표(metrics)로는 파지가 물체에 접촉하는 표면적(Contact Area, CA), 손과 물체 간의 교차 침투 부피(Intersection Volume, IV), 시뮬레이션 변위(Simulation Displacement, SD), 그리고 기존 해석적 안정성 지표 (예: 입실론 안정성) 등을 측정했습니다. Contact Area는 손 표면과 물체 표면이 접촉한 총 면적으로, 값이 클수록 손이 물체를 넓게 감싸 쥐고 있음을 의미합니다. Intersection Volume은 손이 물체를 겹쳐서 파고든 부피로, 이상적으로 0이어야 하지만 약간의 값은 허용됩니다 (본 논문에서는 접촉 면적이 증가함에 따라 불가피하게 약간 상승하지만, 접촉면적 대비 침투량의 비율은 기존 방법과 비슷하게 유지된다고 보고합니다). Simulation Displacement는 앞서 정의한 시뮬레이션 기반 안정성 지표로, 물체에 작은 힘을 가했을 때 얼마나 적게 움직였는지 (속도가 느린지) 나타내며 작을수록 안정적입니다.
평가 결과, Grasp’D로 생성된 파지들은 기존 방법에 비해 압도적으로 높은 접촉 면적을 보였습니다. 평균적으로 약 42cm² 정도의 접촉 면적을 기록했는데, 이는 기존 해석적 방법으로 얻은 파지(약 20cm²)보다 4배 이상 넓은 접촉을 이루는 것입니다. 아래 표에서 보듯 ObMan 데이터셋의 상위 파지들과 비교해도 4배 가까운 접촉 증가이며, 이는 인간이 물체를 쥘 때 손바닥과 손가락으로 넓게 감싸는 면적에 상당히 근접한 수치입니다. 접촉이 늘어난 만큼 파지의 안정성도 크게 향상되었습니다. 시뮬레이션 변위를 기준으로 보면 Grasp’D 파지는 기존 대비 4배 이상 작은 물체 움직임을 보여, 훨씬 견고하게 물체를 붙잡고 있음을 나타냈습니다. 다만 해석적인 안정성 지표(예: epsilon metric)로 평가하면 향상폭이 다소 완만했는데, 이는 이들 지표가 손가락 끝 위주의 힘 배분에 최적화되어 있어 넓은 접촉의 이점을 충분히 반영하지 못하기 때문이라고 해석됩니다. 그럼에도 불구하고 Grasp’D 파지의 절대적인 안정성은 시뮬레이션 검증을 통해 명확히 우수함이 드러났습니다. 예를 들어 손가락 끝만 살짝 걸친 파지는 작은 충격에도 물체가 쉽게 움직였지만, Grasp’D 파지는 손바닥 전체로 누르고 있어 웬만한 흔들림에도 물체가 미동 없이 고정되었습니다.
Qualitative (정성적)한 면에서도 Grasp’D의 우수함이 관찰되었습니다. 인간 손 모형으로 생성된 파지 자세들을 시각적으로 비교해 보면, 기존 방법은 종종 부자연스럽거나 불안정해 보이는 자세(예: 손가락이 허공을 향해 잔뜩 벌어지거나 물체 모양과 맞지 않게 꺾인 자세)가 나왔지만, Grasp’D 결과는 마치 사람이 직접 쥔 것처럼 자연스럽게 물체를 감싸는 형태가 많았습니다. 특히 고접촉 파워그립의 경우, 손바닥과 모든 손가락 마디가 물체에 밀착되어 있어 물체와 손 사이에 빈 공간이 거의 없을 정도로 파지가 이루어졌습니다. 이러한 모습은 인체공학적으로도 더 타당하며, 로봇 핸드로 구현할 경우 물체를 놓칠 위험을 줄여줄 것으로 기대됩니다.
추가 실험으로, Grasp’D가 완전히 처음 보는 물체에 대해서도 잘 작동하는지 확인하기 위해 RGB-D 카메라 입력만으로 얻은 3D 복원 모델에 파지 합성을 시도하였습니다. YCB 물체 데이터셋의 일부 물체들을 여러 각도에서 RGB-D로 스캔하여 3D 메쉬를 복원한 후 (노이즈와 불완전함이 있음) 해당 메쉬에 대해 Grasp’D를 적용해 본 것입니다. 그 결과 완벽한 CAD 모델이 아닐지라도 대부분의 물체에 대해 그럴듯한 인간 파지 자세를 찾아낼 수 있었습니다. 물론 복원 오차로 인해 이상적인 경우보다 파지 품질이 약간 떨어지거나, 간혹 그립이 실패하는 케이스도 있었지만, 시뮬레이션 기반 최적화의 일반화 능력을 보여주는 증거라고 할 수 있습니다. 이는 Grasp’D 접근이 장기적으로는 카메라로 물체를 인식한 뒤 곧바로 물체를 잡는 비전-파지 통합 시스템으로도 확장될 수 있음을 시사합니다. (현재는 한 개 파지에 수 분이 소요되어 실시간 적용은 어려우나, 시뮬레이터 속도 향상과 암시적 표현 개선 등이 이루어진다면 가능해질 것이라고 전망하고 있습니다.)
마지막으로 Grasp’D 논문은 기술한 세부 기법들의 유효성을 입증하기 위한 어블레이션 스터디(ablation study)도 수행했습니다. 앞서 소개한 (1) SDF 코스-투-파인 충돌완화, (2) 누설 그래디언트, (3) 접촉 힘 완화 기법을 각각 제거하거나 변형하여 최적화를 해본 결과, 이 요소들이 없으면 성능이 큰 폭으로 악화되었습니다. 예를 들어 그래디언트 누설을 쓰지 않고 순수하게 접촉시 발생하는 그래디언트만으로 손을 움직이면 초기에 손이 전혀 움직이지 않아 실패하는 경우가 많았고, 문제 완화를 사용하지 않으면 운 좋게 잡을 수 있는 파지만 찾아내고 많은 경우에 국지해(local minima)에 머무르는 현상이 나타났습니다. 이는 Grasp’D 설계에 포함된 기법들이 서로 맞물려 효과를 발휘하고 있음을 보여주며, 복잡한 접촉 최적화 문제에서 각 구성요소의 역할이 중요함을 강조합니다.
구현 관련 고려사항 (초기화 전략, 효율성, 일반화 등)
Grasp’D를 구현하고 사용하는 데에는 몇 가지 실용적인 고려사항이 따릅니다. 첫째, 초기화 전략입니다. 최적화의 시작점인 손의 초기 자세 q_h(0)에 따라 최종 결과 파지가 달라질 수 있기 때문에, 다양한 파지를 얻고자 한다면 초기 자세를 여러 번 샘플링하여 최적화를 반복하는 것이 유용합니다. 논문에서도 손의 시작 위치와 자세를 무작위로 달리하여 top-1, top-2, ... 식으로 여러 파지 후보를 생성한 뒤, 그 중 품질이 가장 높은 것을 선택하거나 다르게 활용할 수 있음을 보여주었습니다. 다만 초기 손 위치가 물체와 완전히 떨어져 있으면 최적화가 진행이 어려울 수 있으므로, 물체 중심 근처에 손이 오도록 배치하고 손가락은 편하게 펼친 상태로 시작하는 것이 좋습니다. Grasp’D는 물체 표면을 패딩한 버전으로 시작하기 때문에 일부러 초기 간섭을 주어 그래디언트를 얻는 셈인데, 사용자가 초기 자세를 크게 벗어나게 두지만 않으면 대부분 수렴하여 파지를 찾습니다.
둘째, 효율성과 속도 이슈입니다. 앞서 언급했듯 한 번 최적화에 수 분 정도가 걸릴 만큼 무거운 작업인데, 이를 완화하기 위해 Grasp’D는 GPU 병렬화를 적극 활용했습니다. 예컨대 손의 수천 개 접촉 후보 지점에 대한 SDF 계산과 힘 계산을 GPU에서 병렬로 수행하고, 여러 초기 속도 시뮬레이션 역시 병렬로 돌려 평균을 내는 등으로 최적화 시간을 단축했습니다. 그럼에도 불구하고 다관절 손과 복잡한 메쉬의 조합에서는 여전히 시간이 오래 걸리므로, 향후에는 더 최적화된 미분가능 물리엔진이나 학습 기반 가속 기법과의 결합도 고려해볼 수 있습니다. 실제 논문 저자들도 Grasp’D를 오프라인 데이터 생성기로 활용하여, 이후 학습 기반 그립 예측기의 성능을 높이는 방향을 제안하고 있습니다 (예: Grasp’D로 생성한 양질의 파지들을 데이터로 모아주면, 이를 학습한 비전 기반 모델이 더 정확한 파지 예측을 할 수 있다는 아이디어).
셋째, 일반화 능력입니다. Grasp’D는 본질적으로 물리 기반이므로 특정 물체 종류나 손 모델에 특화되지 않고 범용적입니다. 실험에서 인간 손, 로봇 손 모두 성공적으로 사용되었고, 물체도 일상 용품부터 도구까지 다양하게 적용되었습니다. 새로운 형태의 로봇 손이나 새로운 재질의 물체라도, 해당 3D 모델과 물리 파라미터(질량, 마찰 등)만 정의하면 Grasp’D로 파지를 찾을 수 있을 것입니다. 이는 학습 기반 접근이 훈련 데이터 분포 밖에서 성능이 떨어질 수 있는 것과 대비되는 장점입니다. 다만 Grasp’D 역시 한계는 있는데, 예를 들어 아주 복잡한 기계 부품처럼 오목한 곳이 많아 손가락이 들어가기 어려운 물체나 변형되는 부드러운 물체 등은 현재 가정(강체 물체, 강체 관절 손)에서 벗어나므로 추가 연구가 필요합니다. 또한 손가락 끝의 센서나 미끄럼 등의 미세 효과는 포함되지 않았기 때문에, 실제 로봇에 적용하려면 이러한 요소 (예: 촉각 센서 활용, 동적 재접촉 등)를 결합하는 방향도 고려될 수 있습니다.
마지막으로 실제 하드웨어 적용 측면에서, Grasp’D는 아직 직접적인 로봇 실험 결과를 제공하진 않았습니다. 하지만 논문에서 생성한 파지 자세들은 현실적인 인간/로봇 손의 관절 제한을 모두 준수하도록 되어 있고, 시뮬레이션에서 물리적으로 검증된 안정성을 보이므로, 충분히 로봇에 이식 가능할 것으로 보입니다. 예컨대 연구자들은 추후 TriFinger 같은 로봇 플랫폼에 Grasp’D 결과를 보내 실제 잡기 실험을 해볼 수 있다고 언급하며, GPU 가속 시뮬레이션에서 실제 로봇으로의 일반화 가능성을 긍정적으로 보고 있습니다. 궁극적으로 Grasp’D의 접근법은 시뮬레이션과 현실 간의 격차를 줄이는 시뮬레이터 기반 로봇 학습의 트렌드와 맞물려 있기 때문에, 적절한 캘리브레이션과 추가 안전장치를 더한다면 현실 로봇공학에서도 유용한 도구로 활용될 전망입니다.
맺음말
Grasp’D는 미분가능한 물리 시뮬레이션을 통해 다관절 손 파지 문제를 새로운 각도로 해결한 흥미로운 연구입니다. 이 접근법은 전통적인 해석적/샘플링 방법들이 가지던 한계를 극복하고, 접촉이 풍부하면서도 안정적인 파지를 자동으로 합성해낼 수 있음을 시범 보였습니다. 마치 물리 법칙을 손가락 움직임의 길잡이로 활용한 셈인데, 이는 추상적인 신경망 출력에 의존하지 않고 직접적인 물리 목표 최적화를 수행했다는 점에서 로봇 학계에 시사하는 바가 큽니다. 물론 현실 세계의 적용까지는 속도와 복잡성 등의 과제가 남아 있지만, 현재도 수 분 내에 고품질 파지를 찾아낼 수 있는 수준이므로, 인간이 일일이 파지 자세를 설계하거나 대규모 데이터를 만들 필요 없이 자동 파지 설계자로서 활용될 수 있습니다. Grasp’D가 보여준 결과 – 예를 들어 손바닥 전체로 물체를 감싸 쥔 파지는 – 인간 수준의 파지에 한 걸음 더 다가선 모습으로, 향후 이 기법이 로봇 손의 잡기 능력 향상과 시뮬레이션을 통한 로봇 학습 고속화 등에 다양하게 응용되길 기대해봅니다.