📃ManipulationNet 리뷰
🔍 Ping. 🔔 Ring. ⛏️ Dig. A tiered review series: quick look, key ideas, deep dive.
- 🤖 Robotic manipulation 연구는 real-world benchmark의 부재로 인해 파편화되어 있었으며, 이를 해결하기 위해 ManipulationNet은 실세계 로봇 조작을 위한 벤치마킹 인프라를 제시합니다.
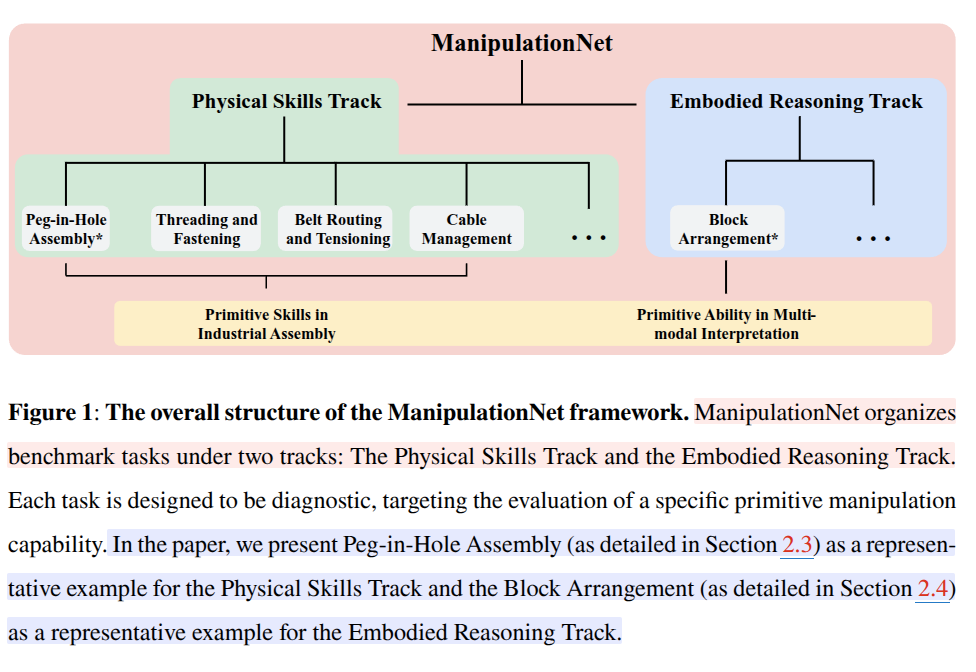
- 🛠️ ManipulationNet은 표준화된 object set과 client-server 아키텍처를 통해 재현 가능한 task setup과 분산된 성능 평가를 가능하게 하며, Physical Skills Track과 Embodied Reasoning Track으로 로봇의 다양한 능력을 측정합니다.
- 📈 이 플랫폼은 real-world manipulation 연구의 접근성, 사실성, 현실성을 균형 있게 제공하여 로봇 조작 분야의 체계적인 발전과 장기적인 과학적 진보를 측정하는 기반을 마련합니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
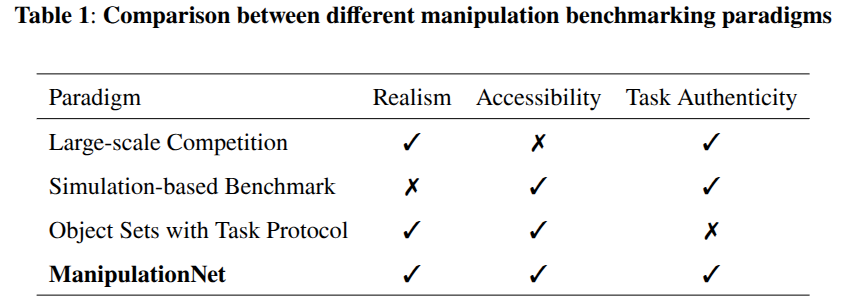
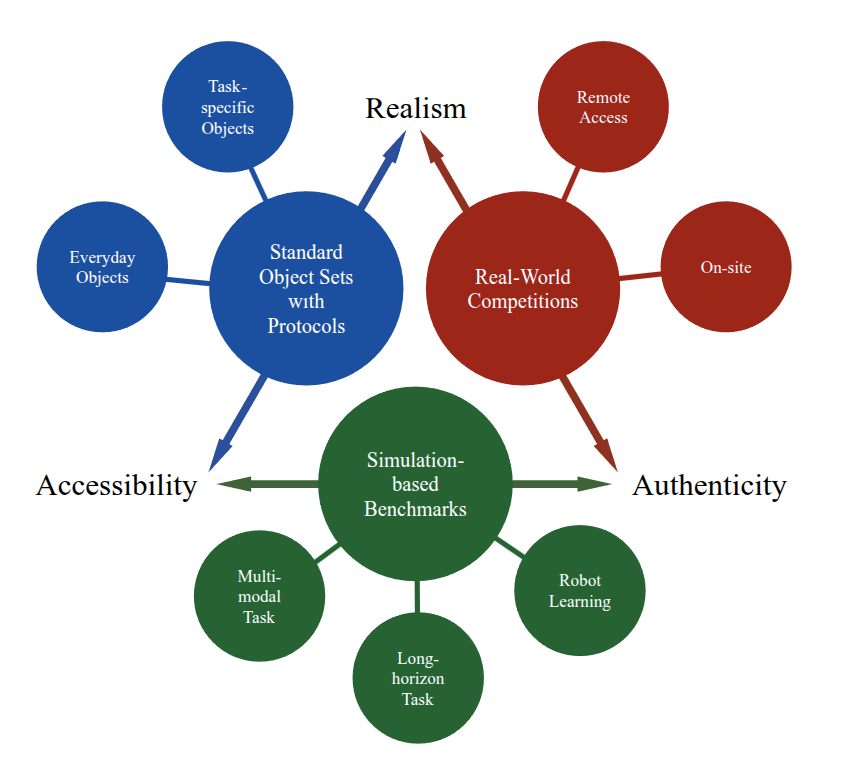
이 논문은 로봇 조작(manipulation) 분야의 벤치마킹에 있어 기존 방식들의 한계, 즉 리얼리즘(realism), 접근성(accessibility), 그리고 진정성(authenticity) 사이의 균형 부족 문제를 해결하기 위해 고안된 새로운 글로벌 인프라인 ManipulationNet을 소개합니다. 기존의 시뮬레이션 기반 벤치마크는 확장성(scalability)과 재현성(reproducibility)이 높지만 실제 물리 역학을 완벽하게 반영하지 못해 리얼리즘이 부족합니다. 반면, 실제 환경 대회(real-world competitions)는 진정성과 리얼리즘은 높으나 리소스 집약적이고 특정 장소 및 시간에 국한되어 접근성이 떨어집니다. 표준화된 객체 세트(standardized object sets)와 프로토콜(protocol)은 재현성을 제공하지만, 실제 실행의 진정성을 보장하기 어렵습니다.
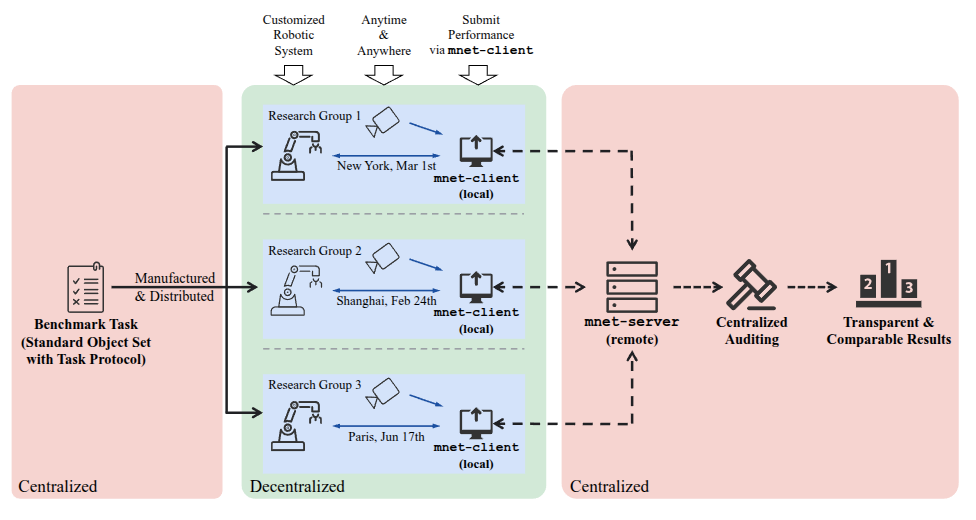
ManipulationNet은 이러한 문제점을 해결하기 위해 하이브리드 중앙 집중식-분산식(hybrid centralized-decentralized) 아키텍처를 제안합니다. 이는 전 세계 연구 그룹들이 자체 로봇 시스템을 사용하여 언제 어디서든 벤치마킹 작업에 참여할 수 있도록 분산된 참여를 가능하게 하면서, 중앙 집중식 검증을 통해 결과의 신뢰성과 비교 가능성을 보장합니다.
핵심 방법론 및 기술적 세부사항:
ManipulationNet은 두 가지 주요 트랙으로 작업을 구성합니다:
- Physical Skills Track (물리적 기술 트랙): 로봇이 실제 물리적 제약 조건 하에서 견고한 sensorimotor skills을 실행하는 능력을 평가합니다. 물리적 상호작용의 강도에 중점을 둡니다.
- Embodied Reasoning Track (구현된 추론 트랙): 물리적 난이도를 최소화하고, 로봇이 자연어 명령(natural language instructions)과 시각적 입력(visual inputs)을 해석하고 multimodal grounding 능력을 통해 적용 가능한 동작으로 변환하는 고수준 추론 능력을 테스트합니다.
작동 방식:
ManipulationNet은 표준화된 객체 세트와 작업 프로토콜을 중앙에서 설계하고 제조하여 전 세계에 배포합니다. 이를 통해 모든 참가자가 동일한 조건에서 작업을 수행할 수 있도록 재현 가능한 작업 설정(reproducible task setups)을 보장합니다.
벤치마킹 프로토콜:
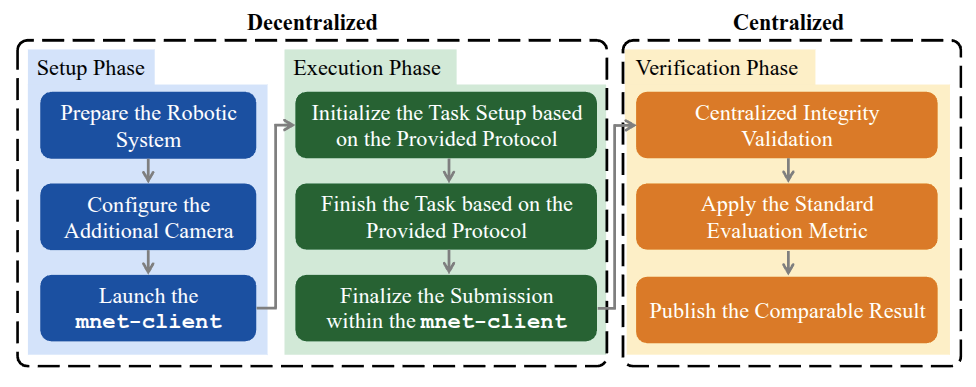
모든 작업은 다음과 같은 일반적인 벤치마킹 프로토콜에 따라 수행됩니다:
- Setup Phase (설정 단계): 참가자는 표준화된 객체 세트를 받고, 로봇 시스템을 구성하며, 로봇 하드웨어와 별개인 독립적인 외부 카메라를
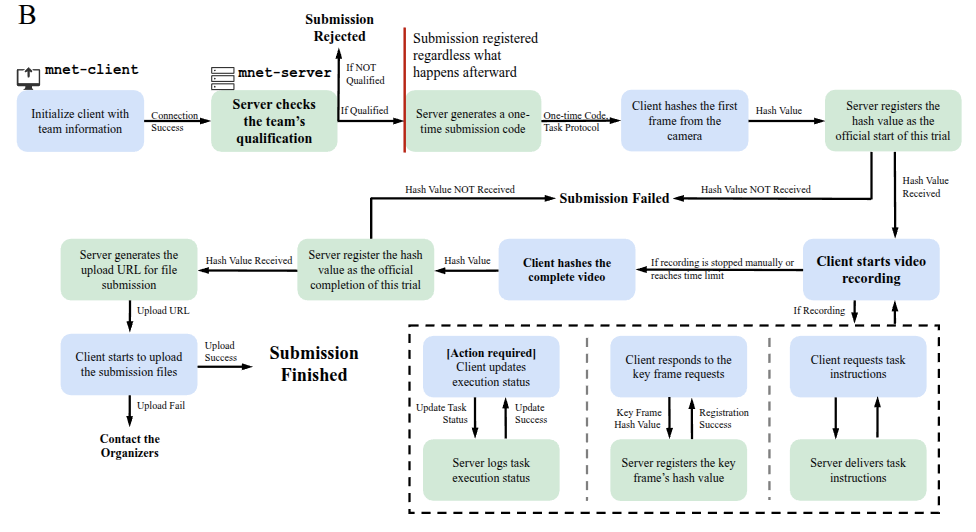
mnet-client에 연결하여 실행 과정을 기록합니다.mnet-client가 실행되면 즉시mnet-server에 trial이 등록되며, 무작위 선택(cherry-picking)을 방지하기 위해 제한된 수의 trial이 할당됩니다. - Execution Phase (실행 단계):
mnet-server는 임의의 일회성 submission code를 생성하여mnet-client에 전송하고, 참가자는 이 코드를 카메라 시야 내에 표시해야 합니다.mnet-client와mnet-server는 보안 연결을 유지하며mnet-client는 실시간으로 작업 실행 상태를 보고하고,mnet-server는 작업 지시(언어/시각적 프롬프트 등)를 전달합니다.mnet-server는 실행 중 무작위로 video frame의 hash값을 요청하여mnet-client로부터 실시간으로 전송받아 비디오의 진정성을 확인합니다. - Verification Phase (검증 단계): 작업 완료 시
mnet-client는 기록된 비디오와 실행 로그(execution logs)를mnet-server에 전송합니다.mnet-server는 제출된 비디오가 일회성 submission code를 명확히 표시하는지, 업로드된 비디오와 frame들이 이전에 등록된 hash값과 일치하는지, 그리고 비디오 길이와 내용이 보고된 작업 상태 및 key frame과 일치하는지 세 가지 기준에 따라 진정성을 검증합니다. 이러한 integrity check를 통과한 후에야 공식 위원회에서 작업별 metrics를 적용하여 평가하고 결과를 공개합니다.
기술적 구현:
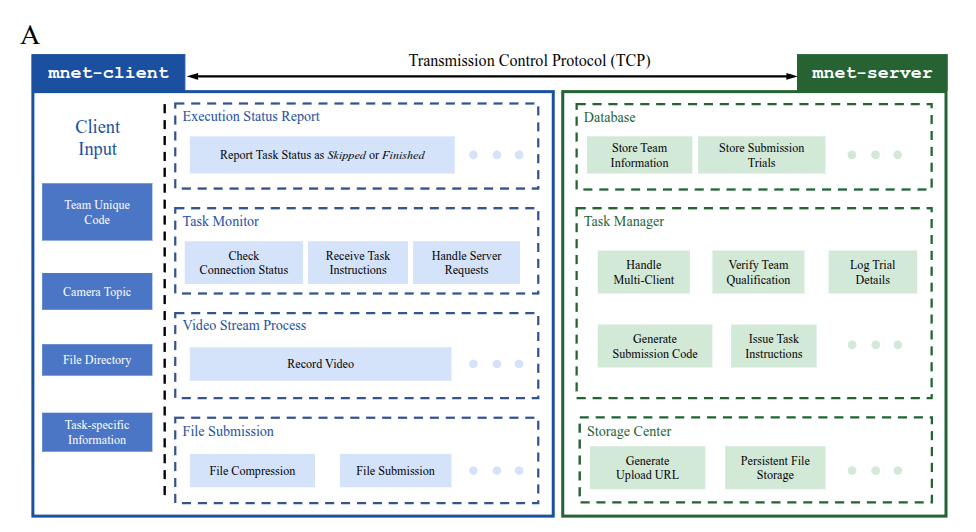
mnet-server는 Amazon Web Services (AWS)에 호스팅되어 전 세계 mnet-client의 접속을 지원하며, 통신은 Transmission Control Protocol (TCP)을 통해 이루어집니다. mnet-client는 Robot Operating System (ROS)과 호환되는 패키지로 구현되어 로봇 플랫폼과의 통합이 용이합니다. 이는 실행 상태 보고, 작업 모니터링, 비디오 처리 (OpenCV 라이브러리를 사용하며 x264 codec으로 인코딩), 파일 제출 등을 관리합니다. mnet-client는 ROS services를 통해 mnet-server에 상태를 보고하며, ROS topics를 통해 로봇이나 사용자에게 필요한 정보를 제공합니다.
mnet-server는 각 mnet-client 연결에 대해 전용 thread를 할당하여 관리합니다. mnet-server의 아키텍처는 task manager와 storage center로 구성됩니다. task manager는 팀 자격 확인, submission code 발급, 실행 상태 로깅, 작업별 지시 전달 등 모든 메시지 수준의 작업을 담당합니다. storage center는 AWS S3를 사용하여 대용량 파일(비디오)을 안정적으로 저장하며, mnet-client는 pre-signed upload URL을 받아 HTTP PUT 방식으로 데이터를 직접 S3에 업로드합니다. 모든 trial metadata, 팀 기록, 제출 상태는 MySQL 데이터베이스에 유지됩니다. 이러한 구조는 대역폭 효율성을 높이고 네트워크 상태에 관계없이 데이터 무결성(integrity)을 보장합니다.
예시 작업:
- Physical Skills Track: Peg-in-Hole Assembly: 객체 세트는 5가지 고유한 형태(대칭/비대칭)의 못(peg)과 보드로 구성됩니다. 각 형태에 대해 3mm, 1mm, 0.1mm, 0.02mm의 4가지 clearance level을 가진 구멍이 있습니다. 제조 공차는 20 microns 이내로 매우 정밀합니다. 보드는 투명한 acrylic 재질로 제작되어 시각 시스템에 대한 지각적 난이도를 높입니다. 삽입 순서는 clearance level이 큰 것부터 작은 것으로, 그리고 기하학적 복잡도가 낮은 것부터 높은 것으로 고정됩니다. 실행 모드는 완전 자율(fully autonomous), human-in-the-loop (고수준 지원), teleoperation (직접 제어)으로 구분됩니다.
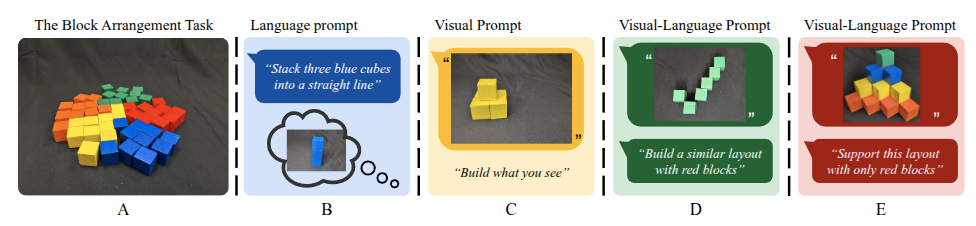
- Embodied Reasoning Track: Block Arrangement: 객체 세트는 5가지 색상(빨강, 노랑, 주황, 파랑, 초록)의 블록으로 구성되며, 각 색상별로 10개의 블록이 있습니다. 모든 블록은 형태, 크기, 재질이 동일합니다. 작업은
mnet-server로부터 받은 프롬프트(prompt)에 따라 블록 배열을 재현하는 것입니다. 난이도가 증가하는 10라운드로 구성되며, 각 라운드는 언어(language) 프롬프트, 시각(visual) 프롬프트, 시각-언어(visual-language) 프롬프트의 세 가지 독립적인 작업으로 이루어집니다. 난이도는 색상 이해, long-horizon tasks, 공간 추론, 물리적 이해, 숨겨진 정보나 추상적 지시로부터의 추론 등 5가지 요소를 기반으로 정의됩니다.
궁극적으로, ManipulationNet은 로봇 조작 능력에 대한 체계적인 이해를 돕고, 과학적 진보의 궤적을 기록하며, 실제 배포 준비가 된 시스템을 식별함으로써 연구 우선순위를 제시하는 지속 가능한 기반을 구축하는 것을 목표로 합니다.