flowchart TD
A["물체 메쉬 O\n접촉점 초기화"] --> B
subgraph UPPER["🔴 상위 최적화 (Upper-Level)"]
B["손 포즈 x = [r, t, q]\n그래디언트 업데이트"]
B --> C["에너지 계산\nE(x) = ΣQj*(x) + Ereg"]
C --> D{"수렴?"}
D -- No --> B
end
subgraph LOWER["🔵 하위 QP (Lower-Level)"]
E["현재 포즈 x에서\n접촉점 위치·법선 계산"]
E --> F["각 접촉점 힘 벡터 최적화\n마찰 원뿔 + wrench 제약 만족"]
F --> G["최적 힘 배분 f*\nQj*(x) 반환"]
end
C --> E
G --> C
D -- Yes --> H["파지 포즈 후보"]
H --> I["MuJoCo 검증"]
I --> J{성공?}
J -- Yes --> K["데이터셋 저장"]
J -- No --> L["버림"]
📃BODex 리뷰
qp
MuJoCo
grasp
Scalable and Efficient Robotic Dexterous Grasp Synthesis Using Bilevel Optimization
- 🚀 이 연구는 Bilevel Optimization과 GPU 가속화를 활용하여 로봇 Dexterous Grasp Synthesis를 위한 확장 가능하고 효율적인 시스템을 개발했습니다.
- 📈 제안된 BODex 시스템은 기존 분석 기반 방법론 대비 Grasp Quality와 합성 속도에서 우월한 성능을 보였으며, MuJoCo 시뮬레이션에서 75% 이상의 성공률을 달성했습니다.
- 💡 또한, BODex로 생성된 대규모 고품질 데이터셋은 Learning Model의 성능을 크게 향상시켰으며, Shadow Hand를 이용한 실제 환경 테스트에서 81%의 성공률을 기록하여 그 효과를 입증했습니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
BODex: Scalable and Efficient Robotic Dexterous Grasp Synthesis Using Bilevel Optimization 논문은 고자유도(high-DoF) dexterous hand의 grasp 합성을 위한 확장성 있고 효율적인 파이프라인과 포괄적인 벤치마크를 제시합니다. 기존 데이터 기반 모델은 비효율성, 강한 가정(예: 등가 접촉력, 마찰 없음), 제한된 객체 세트 등의 한계를 가졌습니다. 이러한 문제를 해결하기 위해, 본 연구는 grasp 합성을 이중 레벨 최적화(bilevel optimization) 문제로 정식화하고, MuJoCo 시뮬레이터를 활용한 벤치마크를 구축합니다.
핵심 방법론
본 연구의 핵심은 grasp 합성을 이중 레벨 최적화 문제로 정의한 것입니다.
1. 이중 레벨 최적화 정식화
- 목적: 주어진 객체에 대해 안정적인 grasp pose x (루트 회전, 변환 및 관절 각도 포함)를 찾는 것입니다. grasp pose는 객체와의 접촉을 유지하고, 외부 wrench에 저항할 수 있는 최적의 손 자세입니다.
- 상위 레벨 최적화(Upper-level Optimization):
- 목적 함수: \min_{x, y_j, j \in \{1, \ldots, s\}} \sum_{j=1}^s Q_j(x)
- 여기서 s는 목표 wrench 방향의 개수입니다.
- Q_j(x)는 하위 레벨 최적화 문제의 해를 나타내며, 현재 손 자세 x에서 특정 목표 wrench t_j에 대해 손이 얼마나 잘 저항할 수 있는지를 평가하는 값입니다. 이 값을 최소화함으로써 다양한 방향의 외력에 대해 안정적인 grasp pose를 찾습니다.
- 제약 조건:
- x_{\min} \le x \le x_{\max}: 로봇 손의 각 관절 및 루트 자세가 물리적인 한계 내에 있도록 합니다.
- c_{i,w} = FK(x, c_{i,l}) \in \partial O: 손의 i번째 예상 접촉점 c_{i,w} (월드 좌표계)가 객체 표면 \partial O과 접촉해야 합니다. 여기서 FK는 전방 운동학(forward kinematics) 함수입니다.
- No (hand-hand/hand-object) collision: 손 자체와 손-객체 간의 충돌이 없어야 합니다.
- 목적 함수: \min_{x, y_j, j \in \{1, \ldots, s\}} \sum_{j=1}^s Q_j(x)
- 하위 레벨 최적화(Lower-level Optimization) - Q_j(x):
- 주어진 손 자세 x와 목표 wrench t_j에 대해, 손이 가할 수 있는 최적의 접촉력 y_j = [f_{j,1}, \ldots, f_{j,m}] (여기서 m은 접촉점의 수)을 찾는 이차 계획(Quadratic Programming, QP) 문제입니다.
- Q_j(x) \triangleq \min_{y_j} \left\| \beta t_j - \sum_{i=1}^m G_i f_{j,i} \right\|^2
- \beta: 목표 wrench의 크기를 조절하는 양의 하이퍼파라미터입니다.
- t_j: 목표 wrench의 단위 벡터입니다. 예를 들어, force-closure grasp의 경우, 6개의 주요 방향(예: [1,0,0,0,0,0] 및 [-1,0,0,0,0,0])에 대한 단위 벡터를 사용합니다.
- G_i \in \mathbb{R}^{6 \times 3}: i번째 접촉점의 grasp matrix로, 해당 접촉력 f_{j,i}를 객체에 가해지는 wrench w_i = G_i f_{j,i}로 변환합니다. G_i = \begin{bmatrix} n_i & d_i & e_i \\ p_i \times n_i & p_i \times d_i & p_i \times e_i \end{bmatrix}로 정의되며, n_i는 접촉 법선, d_i, e_i는 접선 벡터, p_i는 접촉 위치입니다.
- 제약 조건:
- f_{j,i} \in F_i, \quad i \in \{1, \ldots, m\}: 각 접촉력 f_{j,i}는 마찰 원뿔(friction cone) F_i 내에 있어야 합니다. F_i = \left\{f_i \in \mathbb{R}^3 \mid 0 \le f_{i,1} \le 1, f_{i,2}^2 + f_{i,3}^2 \le \mu^2 f_{i,1}^2\right\}로 정의됩니다. 이차 제약 조건을 선형 제약 조건으로 변환하기 위해, 이 타원형 마찰 원뿔은 8-vertex 피라미드형 원뿔로 근사됩니다.
- \sum_{i=1}^m f_{j,i,1} \ge \gamma: 손이 객체에 최소한의 압력을 가하도록 하여 y_j = 0과 같은 자명한 해를 방지합니다. \gamma는 양의 하이퍼파라미터입니다.
- Q_j(x)는 손이 목표 wrench를 얼마나 잘 생성할 수 있는지를 나타냅니다. 상위 레벨에서는 Q_j(x)가 x에 대해 미분 가능하도록 하여 경사 하강법(gradient descent)을 수행합니다.
2. Bilevel 최적화 해결 과정
- 병렬화 및 가속화: 각 상위 레벨 반복에서, cuRobo [7]의 전방 운동학(FK)을 사용하여 손 자세 x로부터 각 손가락 링크의 변환 R_i, T_i를 계산하고, 이를 통해 월드 좌표계에서의 예상 접촉점 c_{i,w}를 얻습니다. 객체에서 가장 가까운 점 p_i와 법선 n_i를 질의하여 Grasp Matrix G_i를 구성한 후, 하위 레벨 QP를 설정합니다. 이 QP들은 PyTorch 기반의 GPU 가속 ADMM 솔버인 ReLU-QP [8]의 배치(batched) 버전을 사용하여 GPU에서 병렬로 해결됩니다. 이는 계산 병목 현상을 크게 줄입니다.
- 충돌 및 관절 제약: 상위 레벨의 관절 한계, 자가 충돌(self-penetration), 상호 충돌(inter-penetration)과 같은 제약 조건은 cuRobo의 해당 에너지 함수를 활용하여 처리됩니다. cuRobo는 로봇 루트의 6-DoF 상태를 최적화 가능한 변수로 포함할 수 있도록 수정되었습니다.
3. Coarse-to-fine 접촉 모델링
- cuRobo의 구(sphere) 기반 접촉 모델은 빠르지만, 정밀한 grasp 합성을 위한 정확도가 부족합니다. 이를 해결하기 위해 coarse-to-fine 전략이 제안됩니다.
- Coarse Stage (300회 반복): 로봇 손의 형상을 구로 근사합니다. 접촉점 c_{i,l}은 각 손가락 끝의 첫 번째 구의 중심으로 설정되며, 거리 에너지 E_d^c = \sum_{i=1}^m (\|c_{i,w} - p_i\| - \alpha)^2를 최소화합니다.
- Fine Stage (pre-grasp 100회, grasp 100회 반복): 실제 충돌 메시(collision meshes)를 사용하여 정밀한 접촉 모델링을 수행합니다. GJK 알고리즘 [29]을 사용하여 각 손가락 끝과 객체 사이의 가장 가까운 점을 찾습니다. GJK 알고리즘의 비미분성 문제를 해결하기 위해, 새로운 거리 에너지 E_d^f = \sum_{i=1}^m \|c_{i,w}^{f'} - p_i^f\|^2와 수정된 grasp 에너지 Q' = \sum_{i=1}^m \|c_{i,w}^{f'} - p_i^c\|^2를 정의합니다. 여기서 c_{i,w}^{f'} = R_i \text{Detach}(c_{i,l}^f) + T_i로 정의하여 c_{i,w}^{f'}가 R_i와 T_i에 대해 미분 가능하도록 합니다.
4. Pre-grasp 및 Collision-Free Hand-Arm Trajectory Synthesis
- 객체와의 충돌을 피하고 힘을 가하기 위한 초기 자세를 제공하기 위해, 객체로부터 최소 1cm 떨어진 pre-grasp pose x_p를 합성합니다.
- 실제 힘을 가하기 위한 squeeze pose x_s는 x_s = 2x - x_p로 정의됩니다. 이 자세가 시뮬레이션 및 실제 환경에서 실행 목표로 사용됩니다.
- 전체 최적화는 세 단계로 구성됩니다: Coarse Stage (300회 반복, 충돌 구, 객체 거리 1cm 줄임), Fine Stage (pre-grasp x_p 생성, 100회 반복, 충돌 메시, Q' 에너지 사용, 거리 줄임 없음), Final Stage (grasp pose x 생성, 100회 반복, Fine Stage와 유사하나 거리 줄임 없음).
실험 결과
- 시뮬레이션 환경 및 객체: MuJoCo 시뮬레이터와 Shadow Hand, Allegro Hand를 사용하며, DexGraspNet [4]의 객체 자산(총 2,397개 객체에 4가지 크기를 적용하여 9,588개 객체)을 사용합니다.
- 평가 지표: 시뮬레이션 성공률(Simulation Success Rate, SSR), 속도(Speed, S), 관통 깊이(Penetration Depth, PD), 자가 관통 깊이(Self-Penetration Depth, SPD), 접촉 거리 일관성(Contact Distance Consistency, CDC), 첫 번째 분산 비율(First Variance Ratio, FVR)을 사용합니다.
- 분석 기반 합성 벤치마킹: DexGraspNet (DGN), SpringGrasp, FRoGGeR 등 기존 파이프라인과 비교했을 때, 본 연구의 파이프라인은 거의 모든 지표에서 우수한 성능을 보이며 특히 SSR과 속도에서 큰 향상(최대 50배)을 달성했습니다. 본 연구의 QP 기반 에너지 함수는 DFC, TDG 등 기존 에너지 함수보다 높은 SSR을 달성하며 시뮬레이션 결과와 더 높은 상관관계를 보였습니다. Coarse-to-fine 및 pre-grasp 전략은 SSR, PD, CDC를 향상시키지만 속도는 감소합니다.
- 학습 기반 합성 벤치마킹: ISAGrasp, GraspTTA, 3D Diffusion policy, UnidexGrasp 등 4가지 학습 아키텍처를 벤치마킹했습니다. 본 연구의 데이터셋으로 학습된 모델은 기존 DexGraspNet 등 다른 데이터셋으로 학습된 모델보다 일관적으로 높은 성능을 보였습니다 (예: UDG 모델의 SSR이 DexGraspNet 데이터셋에서는 40%대였으나 본 연구의 데이터셋에서는 80%대로 향상). 데이터셋 크기를 늘릴수록 성능이 향상됨을 확인했습니다.
- 실제 환경 실험: UR10e 로봇 팔에 Shadow Hand를 장착하고 Azure Kinect 센서를 사용하여 20개 객체에 대해 실험을 수행했습니다. 학습된 모델은 81%의 전반적인 성공률을 달성하여 실제 환경에서의 효과를 입증했습니다. 얇고 평평한 객체에서 grasp이 약간 빗나가거나 너무 넓게 예측되는 실패 사례가 관찰되었습니다.
한계 및 결론
- 한계: 본 연구의 파이프라인은 주로 손가락 끝 접촉에 의존하며 손바닥 접촉을 활용하지 않습니다. 또한, 복잡한 군집 장면(cluster scene)에서의 grasping이나 기능적인(functional) grasp (예: 문 열기)는 다루지 않습니다. 생성된 충돌 없는 궤적은 아직 폐쇄 루프 시각 정책 학습에 활용되지 않았습니다.
- 결론: 본 연구는 로봇 dexterous grasp 합성을 위한 확장 가능하고 효율적인 파이프라인을 제시했으며, 이는 대규모 고품질 데이터셋 구축을 용이하게 하고 데이터 기반 grasp 합성 방법론을 개선합니다. MuJoCo를 통한 포괄적인 벤치마크는 본 파이프라인과 데이터셋의 우수성을 입증했으며, 실제 환경 실험을 통해 그 잠재력을 확인했습니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론: “손이 20개의 관절이면 파지가 왜 이렇게 어려울까?”
로봇 파지(grasping)를 처음 공부하는 사람에게 이런 질문을 던져보자. “물병을 집는 게 어렵나요?” 물론 쉽다. 그런데 로봇에게는? 아이러니하게도, 손가락이 많을수록 — 즉, 더 인간과 닮아있을수록 — 로봇에게는 더 어려운 문제가 된다.
병렬 그리퍼(parallel gripper)는 자유도가 1~2개에 불과하기 때문에 수천 개의 무작위 포즈를 샘플링한 뒤 품질 지표로 필터링하는 방식이 잘 작동한다. 그런데 Shadow Hand나 Allegro Hand처럼 20개 이상의 자유도(DoF)를 가진 덱스테러스 핸드는 이야기가 완전히 달라진다. 자유도가 20개라면, 탐색해야 할 공간은 기하급수적으로 폭발한다. 무작위 샘플링? 끝없는 우주를 다트 하나로 맞추는 격이다.
그렇다면 기존 연구들은 어떻게 접근했을까?
데이터 기반 학습(Learning-based) 방법들은 어느 정도 성과를 거뒀지만, 학습에 필요한 대규모, 고품질 데이터셋이 절대적으로 부족했다. 인간이 직접 물체를 잡는 텔레오퍼레이션 방식(RealDex)은 52개 물체에 대해 5만 9천 개 파지밖에 생성하지 못했다. 너무 느리고, 확장이 어렵다.
그래디언트 기반 최적화는 다른 접근이었다. 파지 포즈를 에너지 함수의 최솟값으로 찾아내는 방식인데, 여기서 “에너지(energy)”란 파지 품질을 수치로 나타낸 것이다. 이 방향이 유망해 보이지만, 기존 방법들에는 세 가지 치명적인 문제가 있었다.
- 물리적 가정의 오류: 모든 접촉점에서 힘이 균등하다거나, 마찰이 없다는 가정 — 현실과 동떨어진 단순화
- 속도 문제: 기존 시스템들은 데이터셋을 수백만 건 규모로 생성하기엔 너무 느렸다
- 벤치마크 부재: 방법들 간에 공정한 비교 기준이 없었다
BODex는 이 세 문제를 한꺼번에 정면으로 해결한다. 핵심 아이디어는 간결하다: 이중 최적화(Bilevel Optimization)를 통해 물리적으로 올바른 파지 에너지를 정의하고, GPU 가속 QP(Quadratic Programming) 솔버로 이를 엄청난 속도로 병렬화한다. 결과는 놀랍다 — 단일 RTX 3090 GPU로 하루에 수백만 건의 파지를 합성한다.
그림 1. Allegro Hand에서 분석 기반 파지 합성 베이스라인과의 비교. BODex 파이프라인은 거의 모든 지표에서 베이스라인을 크게 앞서며, 특히 가장 중요한 두 지표인 시뮬레이션 성공률과 속도에서 압도적이다.
방법론: 이중 최적화의 아름다움
문제 정의: 파지 합성이란 무엇인가
덱스테러스 파지 합성을 수학적으로 정의해보자. 우리가 찾아야 할 것은 파지 포즈 x = [r, t, q] \in \mathbb{R}^{9+3+n}이다.
- r \in \mathbb{R}^9: 루트(손목) 회전 (rotation matrix 표현)
- t \in \mathbb{R}^3: 루트 위치 (translation)
- q \in \mathbb{R}^n: 관절 각도 (n은 손의 DoF)
입력은 물체 메쉬 \mathcal{O}와 각 링크 프레임에서의 기대 접촉점 \{c_{i,l}\}이다.
이때 우리는 다음 조건을 만족하는 x^*를 찾고 싶다:
x^* = \arg\min_x \; E(x) \quad \text{s.t.} \quad \text{관절 범위, 접촉 조건, 충돌 없음}
여기서 E(x)를 어떻게 정의하느냐가 핵심이다.
기존 에너지 함수들의 문제
기존 연구들의 에너지 함수를 잠시 살펴보자.
DFC (Differentiable Force Closure)는 이런 가정을 했다: “모든 접촉점에서 힘이 똑같다”. 왜 이게 문제일까? 현실에서 엄지손가락이 검지보다 훨씬 큰 힘을 낼 수 있다. 균등한 힘을 가정하면, 실제로는 좋은 파지인데 나쁘다고 평가하거나, 나쁜 파지를 좋다고 오판한다.
TDG (Task-oriented DexGrasp)는 마찰을 무시했다. 마찰 없이는 힘을 법선 방향으로만 전달할 수 있다. 현실의 파지는 법선력과 마찰력을 함께 사용하는데, 마찰을 무시하면 실제로 안정적인 파지를 걸러내버린다.
이런 가정들은 에너지 함수를 단순하게 만들어 계산은 빠르지만, 시뮬레이션 성공률(Simulation Success Rate, SSR)과의 상관관계가 낮다. 즉, 에너지가 낮아도 실제 시뮬레이션에서 떨어지는 파지가 많다.
BODex의 핵심: 이중 최적화 (Bilevel Optimization)
BODex의 천재적인 아이디어는 “파지 품질 에너지를 직접 정의하는 대신, 힘 평형 문제(QP)의 최적값으로 정의하자”는 것이다.
Note직관: 이중 최적화를 이렇게 생각해보자
당신이 탁자 위의 물병을 잡으려 한다. 좋은 파지란 무엇인가?
“어떤 방향에서 힘을 가해도 물병이 안 움직이는 것.” 이것이 force closure다.
더 구체적으로: 주어진 손 포즈에서, 각 손가락이 낼 수 있는 최선의 힘 조합으로 물체에 원하는 힘과 토크를 가할 수 있을 때, 그 파지는 좋은 파지다.
이걸 수학으로 표현하면: - 상위 문제(Upper Level): 어떤 손 포즈가 가장 좋은가? - 하위 문제(Lower Level): 주어진 포즈에서, 최선의 힘 배분은?
수식으로 전개하면:
\min_x \; E(x) = \sum_j Q_j^*(x) + E_{\text{reg}}(x)
여기서 Q_j^*(x)는 j번째 desired wrench(힘+토크)에 대한 하위 QP의 최적값이다:
Q_j^*(x) = \min_{f_1, \ldots, f_m} \; \left\| \sum_{i=1}^m \begin{pmatrix} f_i \\ r_i \times f_i \end{pmatrix} - w_j \right\|^2
여기서: - f_i \in \mathbb{R}^3: i번째 접촉점에서의 힘 벡터 - r_i: 접촉점의 위치 벡터 - w_j: j번째 목표 wrench (힘 + 토크의 6D 벡터) - 마찰 원뿔 제약, 법선력 양수 제약, 합산 힘 bound 제약 포함
마찰 원뿔(friction cone)을 어떻게 처리하나? 마찰을 정확하게 표현하면 원뿔 모양(이차 제약: QCQP)이라 풀기 어렵다. BODex는 이것을 8꼭짓점 피라미드 근사로 바꿔 선형 제약(LCQP)으로 변환한다. 그러면 QP 솔버가 훨씬 빠르게 작동한다.
그래디언트는 어떻게 흐르나? (암묵적 미분)
이중 최적화의 기술적 난관이 여기서 등장한다: 상위 최적화의 그래디언트를 계산하려면 \frac{\partial Q_j^*(x)}{\partial x}를 구해야 한다. 그런데 Q_j^*는 QP의 최적값이라 직접 미분하기 까다롭다.
해법은 KKT 조건을 이용한 암묵적 미분(Implicit Differentiation)이다. QP의 최적해 f^*는 KKT 조건을 만족하는데, 이 조건에서 x에 대한 도함수를 역산할 수 있다. 최근의 미분 가능 최적화 라이브러리(differentiable QP solvers)들이 이 과정을 자동화해준다.
GPU 병렬화: 속도의 비밀
BODex가 기존 방법 대비 최대 50배 빠른 이유는 두 가지다:
- 배치 QP 솔버 (Batched ReLU-QP): 수천 개의 파지를 동시에 GPU에서 QP 풀이. 기존에는 CPU 기반 QP를 순차 실행했다.
- cuRobo 기반 운동학: NVIDIA의 CUDA 가속 로봇 라이브러리 cuRobo를 활용하여 순운동학(FK), 자코비안 계산을 배치로 처리.
Tip속도 비교 (단일 RTX 3090 기준)
| 방법 | 파지/초 |
|---|---|
| DexGraspNet (기존) | ~1 grasps/sec (추정) |
| BODex | 49+ grasps/sec |
하루에 수백만 건 생성 가능 → 데이터셋 규모의 패러다임 전환
합성 파이프라인: Coarse-to-Fine
단순히 QP를 푸는 것 외에, BODex는 점진적 정밀화(coarse-to-fine) 전략을 사용한다:
1단계 — Coarse (구(sphere) 근사)
빠른 최근접점 계산을 위해 손의 링크를 구(sphere)로 근사한다. 물체와의 접촉, 충돌 검사가 빠르다. 대략적인 파지 포즈를 빠르게 탐색.
2단계 — Fine (정밀 메쉬) GJK(Gilbert-Johnson-Keerthi) 알고리즘을 써서 실제 충돌 메쉬로 정밀 충돌 계산. 접촉 위치를 정확히 계산하고 파지 포즈를 다듬는다.
그림 2. Coarse-to-fine 전략. 초기에는 구(sphere) 근사로 빠르게 대략적인 파지를 탐색하고, 이후 정밀 메쉬와 GJK로 접촉을 정제한다.
사전 파지 포즈 (Pre-grasp)
최종 파지 포즈 외에 “손가락을 펴서 물체에 접근하는” 사전 포즈도 함께 생성한다. 이는 실제 로봇 실행 시 충돌 없는 진입(approach trajectory) 생성에 필수다.
sequenceDiagram
participant I as 초기화
participant C as Coarse Stage<br/>(구 근사)
participant F as Fine Stage<br/>(GJK 메쉬)
participant P as Pre-grasp<br/>생성
participant V as MuJoCo<br/>검증
I->>C: 무작위 초기 포즈 배치
C->>C: 빠른 충돌/접촉 계산<br/>배치 QP + 그래디언트 강하
C->>F: Coarse 파지 후보 전달
F->>F: 정밀 메쉬로 접촉 정제<br/>GJK 기반 충돌 처리
F->>P: Fine 파지 포즈 전달
P->>P: 손가락 펼쳐 접근 포즈 생성<br/>(cuRobo 모션 계획)
P->>V: (pre-grasp, grasp, squeeze) 트리플
V-->>V: MuJoCo 물리 시뮬레이션<br/>파지 성공 여부 확인
V-->>I: 성공 시 저장 / 실패 시 폐기
데이터셋 규모
BODex가 생성한 데이터셋을 기존과 비교하면:
| 데이터셋 | 핸드 | 물체 수 | 파지 수 | 테이블 | 사전 파지 | 충돌 없는 궤적 | 생성 방법 |
|---|---|---|---|---|---|---|---|
| DDGdata | Shadow | 565 | 6.9K | ✗ | ✗ | ✗ | GraspIt! |
| DexGraspNet | Shadow | 5,355 | 1.32M | ✗ | ✗ | ✗ | 최적화 |
| GenDexGrasp | 다중 | 58 | 436K | ✗ | ✗ | ✗ | 최적화 |
| RealDex | Shadow | 52 | 59K | ✓ | ✗ | 2,630 | 텔레오퍼레이션 |
| BODex-Floating | Shadow | 2,440 | 3.62M | ✗ | ✓ | ✗ | 최적화 |
| BODex-Tabletop | Shadow | 2,440 | 3.41M | ✓ | ✓ | 2.62M | 최적화 |
BODex는 Allegro, LEAP Hand에 대한 데이터셋도 별도로 제공하며, 전체 MuJoCo에서 검증된 파지 수는 약 4.09백만 건이다.
실험: 숫자가 말하는 것들
평가 지표
BODex는 이 분야의 표준 벤치마크가 없다는 문제를 해결하기 위해 MuJoCo 기반의 통일된 벤치마크를 제시한다. 주요 지표:
- SSR (Simulation Success Rate): MuJoCo 시뮬레이션에서 파지 성공 비율 — 가장 중요한 지표
- SPD (Surface Penetration Depth): 손-물체 침투 깊이 (낮을수록 좋음)
- CD (Contact Distance): 손과 물체 표면 간의 거리 (낮을수록 좋음)
- PD (Pose Diversity): 생성된 파지 포즈의 다양성
에너지 함수 비교
서로 다른 에너지 설계가 실제 합성 품질에 어떤 영향을 주는지 비교했다.
결과 요약 (Shadow Hand, SSR 기준):
| 에너지 방법 | 합성 SSR | 평가 상관관계 |
|---|---|---|
| DFC (균등 힘 가정) | 낮음 | 낮음 |
| TDG (마찰 무시) | 낮음 | 낮음 |
| QP_baseline | 중간 | 중간 |
| BODex QP (제안) | +10% vs QP_baseline | 높음 |
특히 BODex의 에너지는 에너지 값과 시뮬레이션 성공 여부의 상관관계가 높다 — 즉, 에너지가 낮으면 실제로 성공할 가능성도 높다는 뜻이다. 이 특성은 학습 기반 방법의 품질 라벨로 활용할 때 매우 중요하다.
그림 3. 에너지 값과 시뮬레이션 성공 여부의 ROC 곡선. BODex의 QP 기반 에너지는 기존 에너지 함수보다 시뮬레이션 결과와의 상관관계(판별력)가 높다.
그림 4. 무작위로 선택된 파지의 시각화. 기존 분석 기반 합성 방법은 더 많은 관통(초록 원), 물체에 닿지 않는 손가락(주황 원), 부자연스러운 포즈(검은 박스)를 보인다.
물체 크기에 따른 성능
흥미로운 관찰이 있다. 물체 크기가 커질수록 성공률이 감소한다. 이는 직관적으로도 이해된다:
- 작은 물체: 손가락이 물체를 “감싸는” wrapping grasp 형태가 쉽게 성립 → force closure 달성 용이
- 큰 물체: 손가락이 물체를 감싸기 어렵고, 최적화 지형(landscape)도 더 평탄해짐
BODex의 에너지는 이 감소 폭이 기존 방법들보다 작다는 점도 강점이다. Allegro Hand가 Shadow Hand보다 높은 성공률을 보이는 것도 이 이유다 — Allegro가 Shadow보다 훨씬 크기 때문에 상대적으로 “작은” 물체를 잡는 상황이 많아진다.
Ablation Study: 각 구성 요소의 기여
어떤 부분이 얼마나 중요한지 제거 실험(ablation)으로 검증했다.
| 구성 요소 | SSR | SPD | CD |
|---|---|---|---|
| 기본 최적화만 | 기준 | 기준 | 기준 |
| + Pre-grasp | ↑ | ↑ | ↑ |
| + Coarse-to-Fine | ↑↑ | ↑↑ | ↑↑ |
| + 두 전략 모두 | 최고 | 최고 | 최고 |
Coarse-to-Fine 전략은 품질을 크게 높이지만 속도를 일부 희생한다. Pre-grasp 생성은 실제 실행에 필수적이다.
학습 모델 품질: BODex 데이터셋 vs DexGraspNet
데이터셋의 진정한 가치는 이것으로 학습한 모델이 얼마나 잘 작동하느냐에 있다.
xychart-beta
title "학습 모델 시뮬레이션 성공률 (%)"
x-axis ["DexGraspNet으로 학습", "BODex로 학습"]
y-axis "성공률 (%)" 0 --> 100
bar [40, 80]
DexGraspNet으로 학습한 모델의 성공률: ~40%
BODex 데이터셋으로 학습한 모델의 성공률: ~80%
두 배 가까운 향상. 데이터셋의 규모를 늘릴수록 학습 모델의 성능이 꾸준히 향상된다는 점도 확인된다.
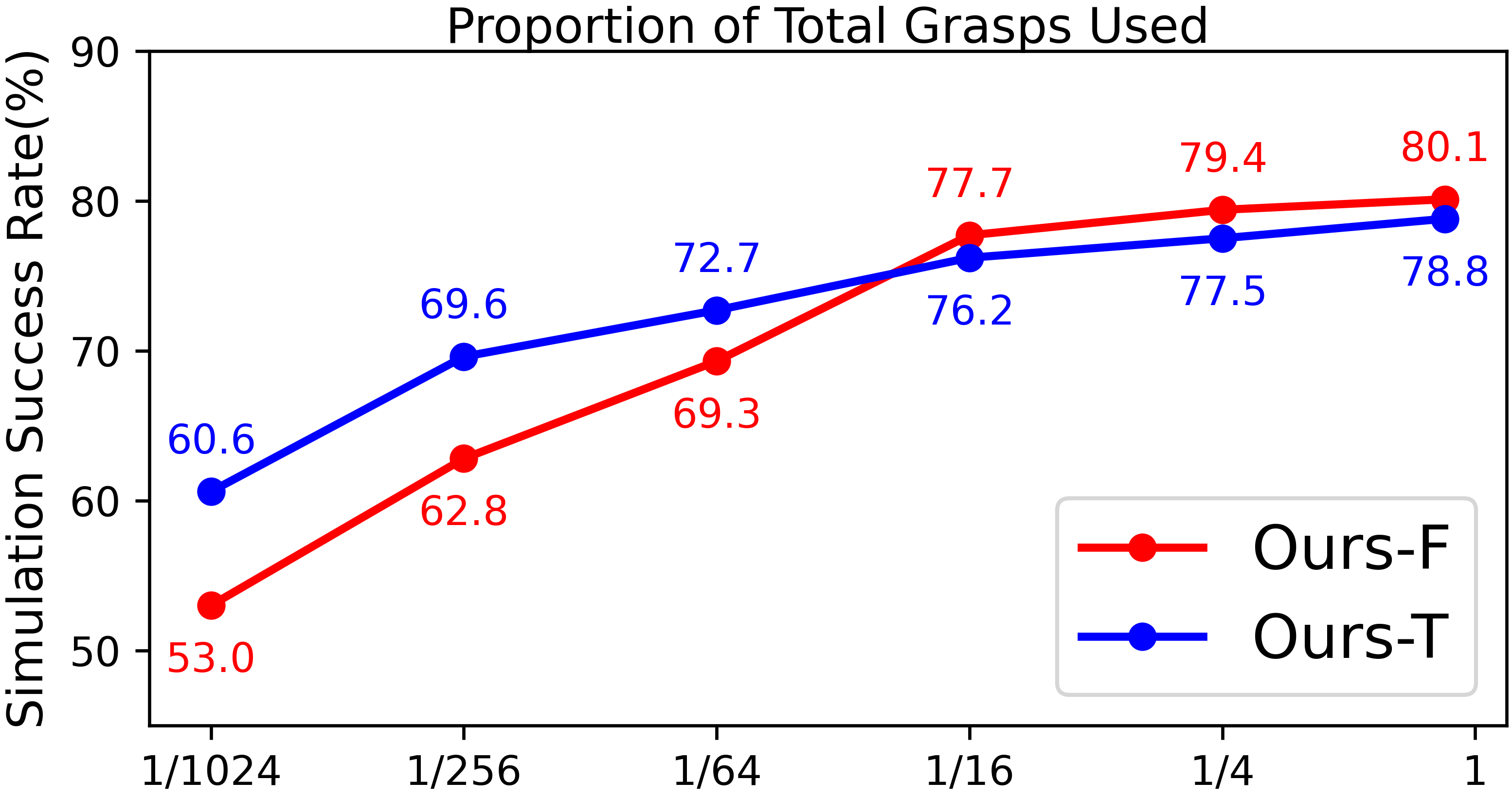
그림 5. 파지 수를 늘렸을 때의 스케일링. 학습 데이터의 규모가 커질수록 모델 성능이 향상된다.
그리고 실제 Shadow Hand로 20개 다양한 물체에 대해 실험한 결과: 81% 성공률을 달성했다. 이는 데이터 품질이 학습 결과에 얼마나 직결되는지를 명확히 보여준다.
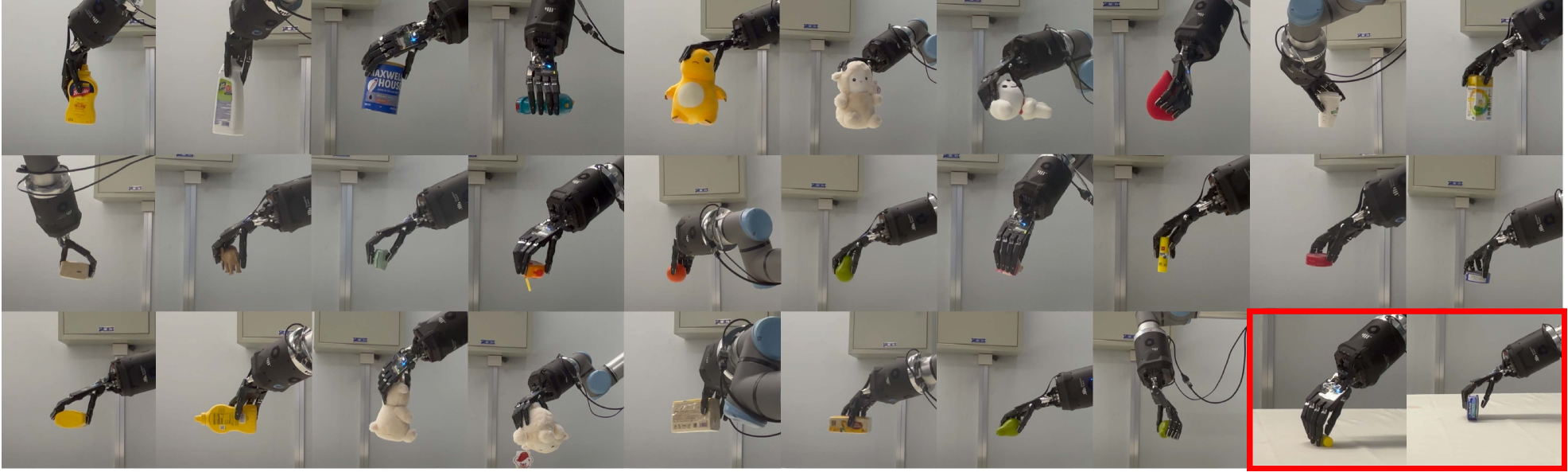
그림 6. 실제 환경 파지 갤러리. 모든 파지는 학습된 네트워크가 예측한 것이다. 앞의 두 줄은 각 물체에 대한 성공 사례, 마지막 줄은 일부 물체의 추가 사례를 보여준다. 빨간 박스는 두 가지 대표적인 실패 사례다.
관련 연구와의 비교
BODex를 다른 연구들과 맥락 속에서 위치시켜 보자.
graph TD
A["고전 최적화 계열"] --> B["GraspIt!\n(충돌 검사 + 샘플링)"]
A --> C["Q1 metric\nGrasp Wrench Space"]
D["그래디언트 기반 계열"] --> E["DFC\n(균등 힘 가정)"]
D --> F["TDG\n(마찰 무시)"]
D --> G["FRoGGeR\n(Differentiable FC)"]
D --> H["SpringGrasp\n(Compliant 최적화)"]
D --> BODex["BODex ★\n(이중 최적화 + GPU QP)"]
I["확산 모델 계열"] --> J["DexDiffuser"]
I --> K["UniDexGrasp++"]
BODex --> L["DexGraspNet 2.0에서 활용"]
BODex --> M["GraspVLA에서 활용"]
BODex --> N["Dexonomy에서 비교 기준"]
DexGraspNet (Wan et al., 2023)
Shadow Hand에 대해 5,355개 물체, 130만 건의 파지를 생성한 당시 최대 규모 데이터셋. 에너지 함수로 TDG(접선력·비틀림 마찰 무시)를 사용. BODex 데이터셋은 물체 수는 적지만(2,440개) 파지 품질이 훨씬 높고, 이를 학습한 모델의 성공률이 40%에서 80%로 두 배 향상.
FRoGGeR (Liu et al., 2023)
미분 가능한 force closure 지표를 도입했지만, 상호작용 렌치 계수의 합이 1이 되도록 제약을 걸어 그래디언트 소실을 방지. BODex는 법선력의 합이 특정 임계값 \gamma 이상이 되도록 제약하는 다른 접근을 취한다.
SpringGrasp (Chen et al., 2024)
탄성 있는 손가락을 고려한 순응형(compliant) 파지 최적화. 접근 방향이 다르지만 BODex와 같이 물리적으로 현실적인 파지를 추구한다는 공통점이 있다.
GraspQP (2025, 동시대 연구)
BODex와 거의 동일한 아이디어인 QP 기반 미분 가능 에너지를 독립적으로 제안. MALA*(Metropolis-adjusted Langevin Algorithm) 변형을 이용해 다양성에 더 초점. 두 연구가 비슷한 시기에 같은 방향을 독립적으로 발견했다는 것 자체가 이 접근의 타당성을 역설적으로 증명한다.
Dexonomy (2025)
BODex를 기준점으로 삼아 여기서 더 나아가, 파지 분류학(taxonomy)에 따른 다양한 파지 유형(power grasp, pinch, etc.)을 생성한다. BODex 대비 다양성에서 우위를 보이지만, BODex가 더 높은 질량 등 어려운 조건에서도 경쟁력 있음을 확인.
비판적 고찰: 강점과 한계
강점
1. 물리적으로 올바른 에너지 설계
“어떤 가정도 없는” QP 기반 에너지. 균등 힘 가정도, 마찰 무시도 없다. 이는 에너지-시뮬레이션 성공률 상관관계를 크게 높여서, 생성된 데이터 품질을 실질적으로 향상시킨다.
2. 엔지니어링의 우수성
cuRobo + GPU 배치 QP라는 조합은 단순히 알고리즘을 개선한 것을 넘어 시스템 수준의 기여다. 단일 3090 GPU로 49+ grasps/sec, 하루 수백만 건이라는 숫자는 이 연구가 데이터 중심 덱스테러스 핸드 연구를 실질적으로 가능하게 만들었다는 뜻이다.
3. 다중 핸드 지원
Shadow, Allegro, LEAP Hand를 모두 지원하는 일반화된 파이프라인. 설정 파일만 바꾸면 새로운 핸드에 적용 가능.
4. 재현 가능한 벤치마크
MuJoCo 기반의 표준화된 벤치마크 제공. 이 분야에서 오랫동안 필요했지만 없었던 것을 채워준다.
5. 후속 연구에의 영향력
발표 직후 DexGraspNet 2.0, GraspVLA 등이 BODex 파이프라인을 그대로 활용하거나 수정해서 쓴다는 사실은, 이 연구가 단순히 좋은 논문에 그치지 않고 인프라 수준의 공헌임을 보여준다.
한계 및 향후 과제
1. Palm Contact 미사용
현재 BODex는 손끝(fingertip) 중심의 파지만 생성한다. 실제 인간의 파지에서 손바닥(palm)은 안정성에 매우 중요한 역할을 하는데, 이를 고려하지 않는다. 특히 큰 물체나 heavy object를 잡을 때 palm contact의 부재는 품질 저하로 이어진다.
2. Fingertip-only Grasps의 다양성 제한
논문 자체도 인정하듯, 현재 생성되는 파지는 주로 “power grasp(물체를 감싸는 방식)” 위주다. 인간이 펜을 쥐는 “정밀 파지(precision grasp)”, 열쇠를 잡는 “lateral pinch” 같은 다양한 파지 유형(grasp taxonomy)을 다루지 못한다. 이 한계는 Dexonomy 같은 후속 연구가 정확히 해결하려는 문제다.
3. Floating Hand 가정
파지 합성 자체는 “공중에 떠 있는 손”을 가정한다. 테이블탑 시나리오를 위해 cuRobo로 모션 플래닝을 추가하지만, 더 복잡한 환경(선반, 장애물, 이중팔 등)으로의 확장은 추가 작업이 필요하다.
4. 마찰 원뿔의 피라미드 근사
마찰 원뿔을 8꼭짓점 피라미드로 근사하면 속도는 빠르지만 물리적 정밀도에서 작은 오차가 생긴다. 이 근사가 실제 실험에서 의미 있는 영향을 주는지에 대한 세밀한 분석은 논문에서 다루지 않는다.
5. 기능적 파지 (Functional Grasps)
“물병을 집어서 마실 수 있게” 같은 태스크 지향적 파지는 지원되지 않는다. BODex는 물리적으로 안정적인 파지를 만들지만, 어떤 방향으로 잡는게 사용에 적합한지는 고려하지 않는다.
6. 실시간 파지 생성 불가
BODex는 오프라인 데이터셋 생성 시스템이다. 49+ grasps/sec는 인상적이지만, 로봇이 새로운 물체를 실시간으로 잡으려 할 때 온라인으로 파지를 합성하는 것은 여전히 어렵다. 이를 위해서는 학습 기반 방법과의 결합이 필수다.
알레그로 핸드 연구자를 위한 노트
BODex 데이터셋에는 Allegro Hand에 대한 데이터가 포함되어 있다(HuggingFace에서 allegro.tar.gz로 제공). 알레그로 핸드 연구자라면 다음 사항에 주목할 필요가 있다:
1. Allegro Hand의 특성상 성공률이 Shadow보다 높다
앞서 설명했듯, Allegro가 Shadow보다 크기 때문에 상대적으로 작은 물체를 잡는 상황에 유리하다. 실제로 논문에서도 Allegro의 SSR이 Shadow보다 높게 나온다.
2. 데이터셋 활용: DexLearn
Allegro, LEAP, Shadow의 파지 데이터는 DexLearn(학습 코드)와 함께 사용할 수 있도록 설계되었다. 네트워크 입력으로 싱글-뷰 포인트 클라우드(single-view point cloud)를 사용한다.
3. VLA 파이프라인과의 연계
BODex 파지 데이터 → 학습 기반 정책(DexLearn) → VLA 모델(예: GraspVLA) 이런 계층적 연계가 가능하다. BODex는 GraspVLA에서도 기반 파이프라인으로 활용되었다.
4. 강화학습 초기화로서의 활용
BODex가 생성한 파지 포즈는 RL 기반 파지 정책의 시작점(initialization)으로도 쓸 수 있다. 무작위 초기화 대신 BODex 파지 포즈에서 RL을 시작하면 탐색 효율이 크게 높아진다.
요약 및 결론
BODex의 기여를 한 줄로 요약하면: “덱스테러스 파지 데이터 생성의 속도-품질 트레이드오프를 동시에 해결한 첫 번째 실용적 시스템”이다.
이중 최적화라는 수학적 우아함과 GPU 병렬화라는 엔지니어링 탁월함이 만났을 때 무슨 일이 생기는지 BODex가 보여준다. 에너지 설계의 물리적 타당성이 높아지자 데이터 품질이 오르고, 데이터 품질이 오르자 학습 모델의 성능이 40% → 80%로 두 배가 됐다. 데이터가 좋으면 모델이 좋아진다는 당연한 사실을, BODex는 정량적으로 증명해냈다.
이 논문이 중요한 세 가지 이유:
데이터셋 공헌: 수백만 건, MuJoCo 검증 완료, 다중 핸드 지원 — 이 분야의 사실상 표준 데이터셋이 되어가고 있다
방법론 공헌: 이중 최적화를 통한 물리적으로 올바른 에너지 설계 — 단순히 빠른 것이 아니라, 올바르게 빠른 것
인프라 공헌: 재현 가능한 MuJoCo 벤치마크 — 이제 우리는 서로 다른 방법을 같은 자로 잴 수 있다
한계도 분명하다. Palm contact 없음, 파지 다양성 제한, 기능적 파지 미지원. 하지만 이것들은 다음 단계가 무엇인지를 명확히 가리키는 열린 문제들이다. Dexonomy, GraspVLA, DexGraspNet 2.0이 이미 그 길을 걷기 시작했고, BODex는 그들 모두의 출발점이 되었다.
덱스테러스 핸드 연구를 하는 사람이라면, BODex를 모르고 2025년을 지나가는 건 어렵다.
참고 자료
- 프로젝트 페이지: https://pku-epic.github.io/BODex
- GitHub: https://github.com/JYChen18/BODex
- 데이터셋 (HuggingFace): https://huggingface.co/datasets/JiayiChenPKU/BODex
- 관련 논문:
- DexGraspNet (Wan et al., 2023): 대규모 파지 데이터셋의 선구자
- FRoGGeR (Liu et al., 2023): 미분 가능 force closure 접근
- GraspQP (2025): 동시대 독립 제안, MALA* 기반
- Dexonomy (2025): 파지 분류학 기반 다양성 확장
- GraspVLA (2025): BODex 파이프라인을 기반으로 한 VLA 연구
- cuRobo (Sundaralingam et al., 2023): BODex의 핵심 운동학 엔진