🧩CoRL 2025
corl
2025
conference
Plan & Search for meaningful insights
Programs
“손/촉각/러닝” 중심 코스에 맞춰 정리한 CoRL 2025 Schedule 정리
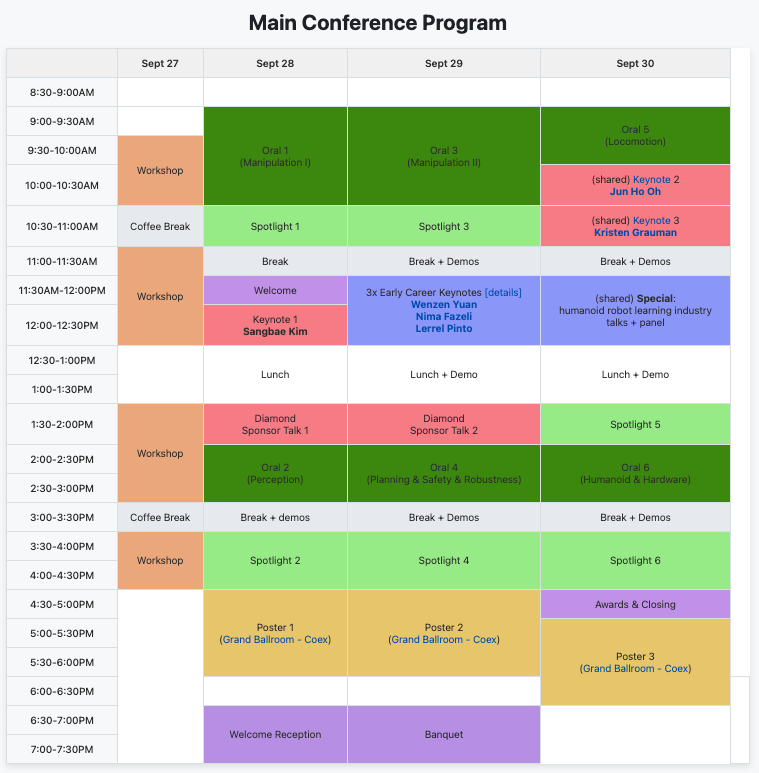
📅 일정 요약
- 9/27(토): 워크숍 집중 — 2nd Workshop on Dexterous Manipulation (손·촉각 연구자 네트워킹/튜토리얼에 최적) (Dexterous Manipulation Workshop)
- 9/28(일): 메인컨퍼런스 오럴 위주 — Oral 6 (Humanoid & Hardware) → Oral 3 (Manipulation II)
- 9/29(월): 포스터 스포트라이트 & 포스터 란 활용 — Spotlight 5, 6 중심(중간중간 데모/부스)
- 9/30(화): 남은 포스터/데모 & 키노트/EC Keynote 체크(시간 맞춰 이동) (CoRL)
2025-09-27 (토) — 워크숍 데이
- 09:00 – 09:30 : 행사 등록 및 오프닝 (예정)
- 09:30 – 10:30 : RemembeRL Workshop – Invited Talk 1 (워크숍 시작)
(+ 중간 휴식: 10:30 – 11:00) - 11:00 – 12:30 : 워크숍 연사 발표 및 세션 (TBD)
- 12:30 – 13:30 : 점심시간
- 13:30 – 15:00 : 워크숍 후반 세션 및 Poster Session 2
(+ 휴식: 15:00 – 15:30) - 15:30 – 16:30 : Poster Spotlights / 패널 토론
- 16:30 – 16:40 : 워크숍 종료 및 클로징 리마크
2025-09-28 (일) — 메인 컨퍼런스 Day 1
- 09:00 – 10:00 : 컨퍼런스 등록 및 오프닝
- 10:00 – 12:00 : Oral Session 6 (DexUMI, DexSkin 참석)
- 12:00 – 13:00 : 점심
- 13:00 – 15:00 : Oral Session 3 (KineSoft, Tactile Beyond Pixels, Cross-Sensor Touch Generation 참석)
- 15:00 – 15:30 : 휴식 / 네트워킹
- 15:30 – 18:00 : Spotlight 5 Poster (Self-supervised perception, Sim-to-Real RL, Crossing the Gap)
- 18:00 – : 자유 시간 / 데모 부스 탐방
2025-09-29 (월) — 메인 컨퍼런스 Day 2
- 09:00 – 10:30 : Poster Spotlight 6 (VT-Refine, KineDex, LocoTouch, Text2Touch)
- 10:30 – 11:30 : 추가 관심 포스터 탐방 / 휴식
- 11:30 – 13:00 : Early Career Keynotes (Yuan, Fazeli, Pinto)
- 13:00 – 14:00 : 점심
- 14:00 – 15:30 : 관심 논문 세션 (재검토 및 부스 방문)
- 15:30 – 16:00 : 휴식
- 16:00 – 18:00 : Poster 스윕 또는 추가 네트워킹
- 18:00 – : 자유 시간 또는 저녁 세션 참여
2025-09-30 (화) — 메인 컨퍼런스 Day 3 / 키노트 데이
- 09:00 – 10:00 : 등록 / 마무리 준비
- 10:00 – 10:30 : Jun-Ho Oh 기조 강연 (“The Golden Age of Humanoid Robots”)
- 10:30 – 11:00 : Kristen Grauman 기조 강연 (“Skill learning from video”)
- 11:00 – 12:00 : 남은 관심 Oral/Poster 세션 또는 데모 탐방
- 12:00 – 13:00 : 점심
- 13:00 – 15:00 : 부스 방문 / 네트워킹
- 15:00 – 16:00 : 남은 발표 청취 또는 발표자 Q&A
- 16:00 – 18:00 : 마무리 정리 / 네트워킹 마감
🎤 Oral 선택 세션
Oral 6 — Humanoid & Hardware (핵심 키워드: 손·촉각·Real World)
- DexUMI: Using Human Hand as the Universal Manipulation Interface for Dexterous Manipulation — arXiv
- 한줄 핵심: 손 착용 외골격+비전 인페인팅으로 인간 손 동작을 다양한 로봇 핸드로 전이, Real World 평균 86% 성공.
- 발표가치 예측: 🔥 Must-see — 범용 핸드 전이/데이터 수집 파이프라인이 실전성 높음. (arXiv)
- DexSkin: High-Coverage Conformable Robotic Skin for Learning Contact-Rich Manipulation — Project page
- 한줄 핵심: 유연한 고밀도 정전용량형 e-skin으로 손가락 전면/배면을 촉각으로 덮어 접촉 풍부 과제의 학습/전달 시연.
- 발표가치 예측: 🔥 Must-see — 저가·대면적 촉각 하드웨어의 Real World 학습 적용이 매력적. (arXiv 예정) (DexSkin)
Oral 3 — Manipulation II (핵심 키워드: 소프트핸드·촉각표현·Tactile 생성)
- KineSoft: Learning Proprioceptive Manipulation Policies with Soft Robot Hands — arXiv
- 한줄 핵심: 소프트핸드 내부 변형/스트레인 기반 고유감각으로 키네스틱 티칭+형상조건 제어 결합한 모사학습 프레임워크.
- 발표가치 예측: 👍 High — 소프트핸드 실사용 데모/정확도 향상 근거 명확. (arXiv)
- Tactile Beyond Pixels: Multisensory Touch Representations for Robot Manipulation — arXiv
- 한줄 핵심: 이미지·오디오·모션·압력 4모달 촉각표현(Sparsh-X) 사전학습으로 정책 성공률 +63%, 강건성 +90%.
- 발표가치 예측: 🔥 Must-see — 멀티모달 촉각표현의 스케일·일반화 근거 제시. (arXiv)
- Cross-Sensor Touch Generation — (예정/정보 제한)
- 한줄 핵심: 이기종 촉각센서 간 생성/번역으로 데이터 증강·표현 정합을 겨냥한 작업.
- 발표가치 예측: 👀 Watch — 세부 메트릭 공개 여부에 따라 가치 상향 가능. (arXiv)
🧪 Poster Spotlights / Posters (우선순위 셀렉션)
Spotlight 5 & Poster 3 (촉각·휴머노이드 Dexterity 집중)
- Self-supervised perception for tactile skin covered dexterous hands — arXiv
- 한줄 핵심: Self-supervised Sparsh-skin 인코더로 손 전체의 자기자석식 스킨 신호를 잠재표현화, 성능 +41%/표본효율 개선.
- 발표가치 예측: 🔥 Must-see — 전면 스킨 활용 퍼셉션·정책 모두 개선. (arXiv)
- Sim-to-Real Reinforcement Learning for Vision-Based Dexterous Manipulation on Humanoids — arXiv
- 한줄 핵심: 휴머노이드 양손 Dexterity에서 실-시뮬 자동튜닝, Reward 설계 일반화, 분할증류로 시연·일반화 확보.
- 발표가치 예측: 👍 High — 데모 의존↓, RL 단독으로 접촉풍부 과제 달성. (arXiv)
- Crossing the Human-Robot Embodiment Gap with Sim-to-Real RL using One Human Demonstration — arXiv
- 한줄 핵심: 단 1개 인간 RGB-D 데모에서 객체궤적 Reward+프리-그랩 포즈 초기화로 휴먼-로봇 격차를 RL로 브리지.
- 발표가치 예측: 🔥 Must-see — 데이터 비용 혁신·휴먼→로봇 전이 실효성 큼. (arXiv)
Spotlight 6 & Poster 3 (Tactile·Reward·Teaching 파이프라인)
- VT-Refine: Learning Bimanual Assembly with Visuo-Tactile Feedback via Simulation Fine-Tuning — OpenReview
- 한줄 핵심: 실데모+고충실 Tactile 시뮬+RL 조합으로 정밀 양팔 조립 학습(시연/어블레이션 포함).
- 발표가치 예측: 👍 High — 비주-촉각 통합의 정석 사례. (OpenReview)
- KineDex: Learning Tactile-Informed Visuomotor Policies via Kinesthetic Teaching for Dexterous Manipulation — arXiv
- 한줄 핵심: 핸드-오버-핸드 키네스틱 티칭+비주-Tactile 정책+힘제어로 접촉풍부 과제 74.4% 달성.
- 발표가치 예측: 👍 High — 포스/촉각 결합 실성능 수치 제시. (arXiv)
- Text2Touch: Tactile In-Hand Manipulation with LLM-Designed Reward Functions — Project page
- 한줄 핵심: LLM 기반 Reward 설계를 실제 비전-기반 Tactile 인-핸드 회전에 적용해 Reward공학 비용 절감.
- 발표가치 예측: 👀 Watch — 실제 Tactile 하드웨어와 LLM Reward의 접점 확인 가치. (efi robotics)
Spotlight 4 & Poster 2
이동 시간 여유 시 강추
- LocoTouch: Learning Dexterous Quadrupedal Transport with Tactile Sensing — arXiv
- 한줄 핵심: 등면 Tactile 어레이+시뮬-정합으로 무고정 원통물 장거리 운반을 4족 로봇이 제로샷 실전 수행.
- 발표가치 예측: 👍 High — 촉각을 이동체(로코모션)에 접목한 참신 응용. (arXiv)
🗝️ Keynotes / EC Keynotes(참고)
- 메인 키노트 & EC Keynotes(예: Wenzhen Yuan, Nima Fazeli, Lerrel Pinto) — 촉각/조작 주제와 직접 연관된 관점 업데이트에 유익. 세션 시간대는 공식 페이지 수시 확인. (CoRL)
✅ 이동/청취 팁
- 우선순위 규칙: (1) Oral 6·3 > (2) Spotlight 5·6 > (3) Spotlight 4 (충돌 시).
- 포스터 전략: 위 목록을 우선 라우팅하고, 같은 섹션대 인접 포스터(손/촉각 키워드)까지 빠르게 스윕.
- 버퍼 확보: 오럴→포스터 이동 전후 최소 10–15분 이동·대화 버퍼 확보(질문/네트워킹 포함).
- 자료 회수: arXiv/프로젝트 페이지를 미리 즐겨찾기(모바일)해 부스/데모에서 바로 레퍼런스 공유.
✋ 질문 리스트
| 세션 / 발표자 | 질문 내용 (한국어) | 질문 내용 (영어) |
|---|---|---|
| DexUMI (Oral 6) | 착용형 외골격 사용자 맞춤은 어떻게 이루어지나요? | How is user customization achieved in the wearable exoskeleton? |
| 비전 인페인팅 기술이 다양한 로봇 핸드에 어떻게 일반화되었나요? | How does the vision-based inpainting generalize across different robotic hands? | |
| 서로 다른 로봇 핸드 플랫폼 간의 성능 차이가 있었나요? | Were there performance differences among different robotic hand platforms? | |
| KineSoft (Oral 3) | 내부 스트레인 센서의 해상도와 응답 속도는 어떻게 되나요? | What is the resolution and response time of the internal strain sensor array? |
| 키네스틱 티칭 방식과 기존 IL 방식의 성능 차이는 무엇인가요? | What are the performance differences between kinesthetic teaching and traditional imitation learning? | |
| 티칭 기반으로 수집된 데이터를 통한 재현성은 어떤 수준인가요? | How reproducible are the demonstrations collected via kinesthetic teaching across different object types? | |
| Tactile Beyond Pixels (Oral 3) | 네 가지 촉각 모달리티 중 가장 기여가 컸던 downstream task는 무엇인가요? | Which downstream task benefited most from the four tactile modalities? |
| 각 모달리티의 중요도는 어떻게 평가하셨나요? | How were the importance levels of each tactile modality assessed? | |
| Self-supervised 사전학습 후, 실제 정책 학습에는 어떻게 통합되었나요? | After self-supervised pretraining, how was it integrated into actual policy learning? | |
| Sparsh-skin (Poster) | tactile 스킨 Self-supervised 학습에서 사용한 주요 프리텍스트 작업은 무엇인가요? | What were the main pretext tasks used in self-supervised learning for tactile skin? |
| latent 표현에서 어떤 특징이 가장 중요하다고 보시나요? | Which features in the latent representation do you consider most crucial? | |
| 이 표현을 활용한 downstream manipulation task의 성능 향상은 어느 정도인가요? | How much did manipulation task performance improve using these representations? | |
| Sim-to-Real RL (Poster) | 시뮬레이터를 현실에 맞추기 위해 조정한 핵심 파라미터는 무엇인가요? | What were the key simulation parameters tuned for sim-to-real transfer? |
| 일반화 과정에서 가장 어려웠던 상황은 무엇이었나요? | What was the most challenging situation during the generalization phase? | |
| 실제 환경에서 RL 정책의 안정성을 확보하기 위한 전략은 무엇인가요? | What strategies were used to ensure RL policy stability in real-world settings? | |
| Crossing the Gap (Poster) | 단 1개의 RGB-D 데모만 사용하는 기법의 주요 의도는 무엇인가요? | What is the core intention behind using only one RGB-D demonstration? |
| 단일 데모가 과제 복잡도에 따라 어떻게 성능에 영향을 미쳤나요? | How did a single demonstration impact performance depending on task complexity? | |
| 이 방식이 시뮬 기반 학습과 결합될 경우 어떤 시너지가 있나요? | What synergies arise when combining this method with sim-based learning? | |
| VT-Refine (Poster) | 시각 및 촉각 정보는 어느 시점에서 융합되었나요? | At what point are visual and tactile inputs fused in the control loop? |
| 양손 조립 과제의 난이도는 어떻게 정의되었나요? | How was the difficulty level of the bimanual assembly task defined? | |
| fine-tuning 전략과 반복 제어 구조를 어떻게 설계하셨나요? | How did you design the fine-tuning strategy and iterative control structure? | |
| KineDex (Poster) | 시뮬 환경의 노이즈 및 오차에 대해 어떻게 강건성을 확보하셨나요? | How did you ensure policy robustness against noise/errors in simulation? |
| 포스/촉각 기반 접촉 조작의 실패율은 어느 정도였나요? | What was the failure rate for force/tactile-based contact manipulation? | |
| 티칭 데이터에서 정책 학습 전이 시 오버헤드는 어떻게 관리하셨나요? | How did you manage overheads during the transfer from teaching data to policy learning? | |
| LocoTouch (Poster) | 촉각 어레이의 형태와 위치는 어떻게 설계되었나요? | How were the shape and placement of the tactile array designed? |
| zero-shot 시뮬→실 전이에 포함된 도메인 랜덤화 요소는 무엇인가요? | What domain randomization factors were included in the zero-shot sim-to-real transfer? | |
| 원통 운반 과제에서 실패 사례는 무엇이었고 어떻게 개선했나요? | What were the failure cases in the cylinder transport task, and how were they improved? |
+++
- FFHFlow: A Flow-based Variational Approach for Learning Diverse Dexterous Grasps with Shape-Aware Introspection
- Sim-to-Real Reinforcement Learning for Vision-Based Dexterous Manipulation on Humanoids
- RobustDexGrasp: Robust Dexterous Grasping of General Objects
- LodeStar: Long-horizon Dexterity via Synthetic Data Augmentation from Human Demonstrations
- DexTrack: Towards Generalizable Neural Tracking Control for Dexterous Manipulation from Human References
- Morphologically Symmetric Reinforcement Learning for Ambidextrous Bimanual Manipulation
- Vision in Action: Learning Active Perception from Human Demonstrations
- Point Policy: Unifying Observations and Actions with Key Points for Robot Manipulation
- CDP: Towards Robust Autoregressive Visuomotor Policy Learning via Causal Diffusion
- D-Cubed: Latent Diffusion Trajectory Optimisation for Dexterous Deformable Manipulation
- Humanoid Policy ~ Human Policy
- ClutterDexGrasp: A Sim-to-Real System for General Dexterous Grasping in Cluttered Scenes
- RoboArena: Distributed Real-World Evaluation of Generalist Robot Policies
- Training Strategies for Efficient Embodied Reasoning
- π0.5: a Vision-Language-Action Model with Open-World Generalization
- DemoSpeedup: Accelerating Visuomotor Policies via Entropy-Guided Demonstration Acceleration
- ImMimic: Cross-Domain Imitation from Human Videos via Mapping and Interpolation
- X-Sim: Cross-Embodiment Learning via Real-to-Sim-to-Real
- SAIL: Faster-than-Demonstration Execution of Imitation Learning Policies
- Streaming Flow Policy: Simplifying diffusion/flow-matching policies by treating action trajectories as flow trajectories
- Steering Your Diffusion Policy with Latent Space Reinforcement Learning
- Real2Render2Real: Scaling Robot Data Without Dynamics Simulation or Robot Hardware
- DexSkin: High-Coverage Conformable Robotic Skin for Learning Contact-Rich Manipulation
- Learning Visuotactile Skills with Two Multifingered Hands
- 3D-ViTac: Learning Fine-Grained Manipulation with Visuo-Tactile Sensing
- GELLO: A General, Low-Cost, and Intuitive Teleoperation Framework for Robot Manipulators