🧩DORA
AI is booming! Robotic framework however hasn’t changed much in years… I totally agree!
1 1️⃣ Introduction
DORA(Dataflow-Oriented Robotic Architecture)는 로봇/임베디드 AI 애플리케이션을 위한 데이터플로우 지향 미들웨어로, 노드(연산)를 그래프(파이프라인)로 정의하여 저지연, 조합가능(composable), 분산 실행을 목표로 설계된 프레임워크입니다.
1.1 핵심 특징 (요점 정리)
- 데이터플로우 모델: 애플리케이션을 노드(프로세스/모듈)와 엣지(데이터 연결)로 구성된 그래프(파이프라인)로 정의합니다. 노드를 쉽게 교체·재사용할 수 있습니다.
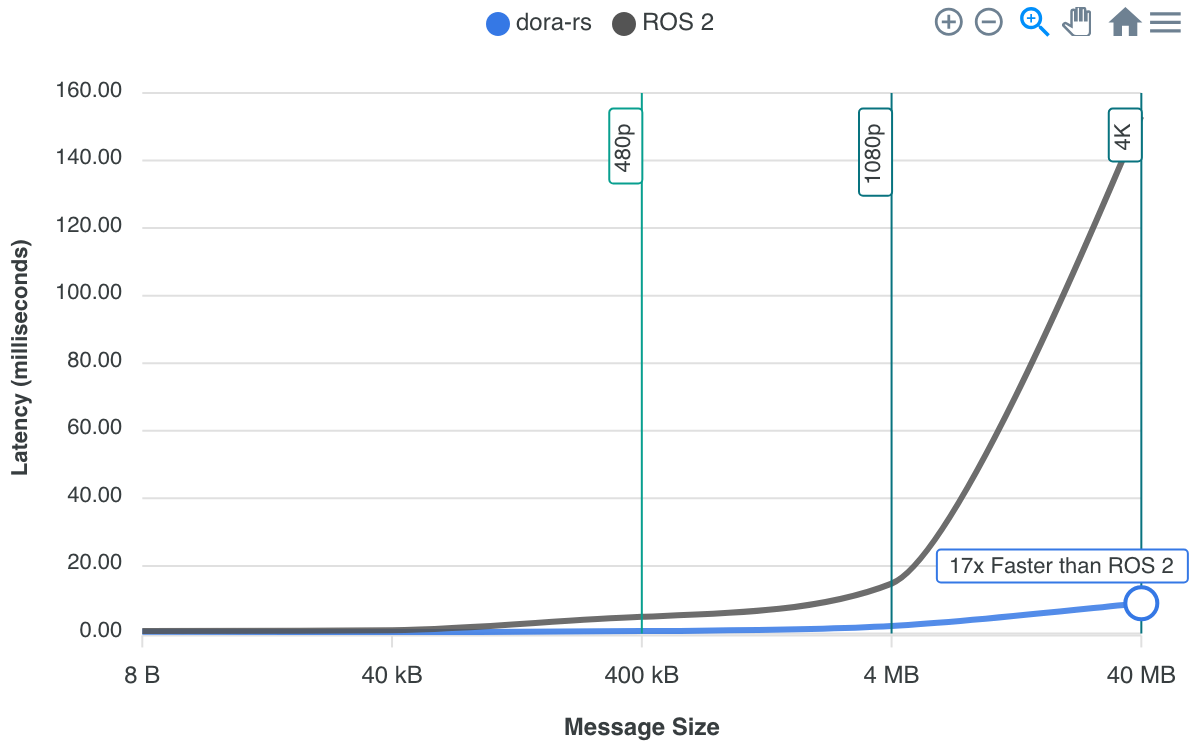
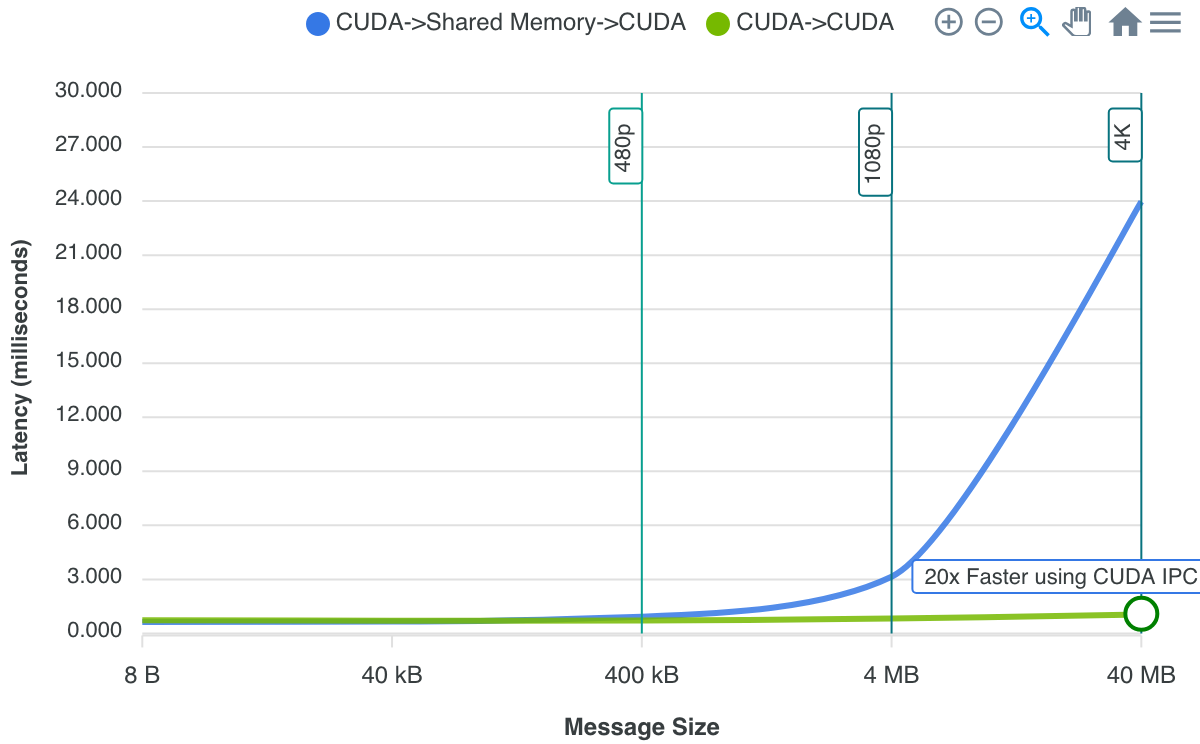
- 저지연(Zero-copy) 설계: 자체 공유 메모리 서버와 Apache Arrow를 활용해 제로 카피(복사 없는) 데이터 전달을 지원하여 높은 성능을 냅니다.
- 멀티언어/멀티런타임: Rust로 핵심이 개발되었지만, 노드는 Rust/Python/C 등 다양한 언어로 구현할 수 있도록 노드 API를 제공합니다. (예:
dora-node-api크레이트 문서). - 분산·조합 가능: 로컬 프로세스뿐 아니라 분산 환경에서 파이프라인을 구성해 실행할 수 있도록 설계되어 있습니다.
- 오픈 소스·라이선스: GitHub에 공개되어 있으며 Apache-2.0 라이선스를 사용합니다. (스타/포크 등 활동도 활발).
1.2 아키텍처와 동작 방식(간단한 개념)
- 노드(node): 센서 입력, 모델 추론, 플래너, 로그 등 각각의 연산 단위를 노드로 구현합니다. 노드는 입력을 받고 출력(또는 여러 출력)을 발행합니다.
- 오퍼레이터(operator): 노드 내부에서 데이터를 변환하거나 라우팅하는 작은 연산 단위로 볼 수 있습니다.
- 그래프 정의:
dataflow.yml같은 그래프 정의 파일로 노드 간 연결(파이프라인)을 선언하고, DORA 런타임이 이를 해석해 노드 간 통신을 설정합니다. - 데이터 포맷: 성능을 위해 Arrow 포맷을 우선 추천하고, 공유 메모리로 데이터 버퍼를 주고받아 복사 비용을 줄입니다.
(요약하면: 작은 독립 프로세스들을 그래프처럼 연결해 데이터가 흐르도록 하고, 그 전달을 고성능으로 처리하는 구조입니다.)
1.3 설치
- 배포판(릴리스 ZIP)을 다운로드해
$HOME/bin등 경로에 넣고dora --help로 설치 확인. ([dora-rs.ai][6]) - Rust로 노드를 작성하려면 워크스페이스를 만들고
Cargo.toml에 노드/오퍼레이터 멤버를 추가한 뒤 예시처럼 노드 소스(바이너리)와 sink(로그 등)를 만듭니다.dora-node-api를 통해 입력/출력을 처리합니다. - 문서의 “Getting started” 가이드가 단계별 예제를 제공하니 따라 하면 기본 파이프라인을 실행해볼 수 있습니다.
1.4 예제·생태계
- dora-drives: 초심자용 자율주행 튜토리얼로, DORA로 자율주행 파이프라인을 만들어보는 단계별 가이드가 제공됩니다. 학습·데모용으로 유용합니다.
- dora-lerobot, 기타 데모/허브 리포지토리들이 있고, 공식 사이트의 Guides/Blog/Examples를 통해 데모(예: Reachy 로봇 데모)와 연동 사례를 확인할 수 있습니다.
1.5 언제 DORA를 쓰면 좋나?
- 여러 센서·모듈(카메라, 라이다, IMU, 모델 추론 등)을 조합해 저지연 파이프라인을 구성해야 할 때: 데이터 포맷(Arrow)과 공유 메모리 기반 전달이 유리합니다.
- 멀티언어(예: 일부 모듈은 Python, 성능 모듈은 Rust)로 구성된 시스템을 하나의 파이프라인으로 묶어야 할 때.
- 분산 환경(로컬 + 엣지 + 클라우드)에서 파이프라인을 분해·배치해 실행해야 하는 경우.
1.6 장단점 / 주의사항
- 장점
- 성능(제로카피)과 안전성(주요 코드가 Rust로 작성)으로 높은 처리량과 낮은 지연을 기대할 수 있습니다.
- 모듈화가 잘 되어 있어 복잡한 파이프라인을 깔끔하게 관리할 수 있습니다.
- 단점 / 고려사항
- 학습곡선: 데이터플로우 개념과 Rust 기반 워크스페이스/크레이트 구조에 익숙해져야 합니다.
- 생태계 성숙도: ROS2 브릿지 등 확장들이 있지만(문서/예제 참고) 특정 하드웨어 드라이버나 상용 미들웨어와의 직접 통합은 추가 작업이 필요할 수 있습니다. (가이드·예제 활용 권장).
빠른 실습 팁
- 먼저 공식 “Getting started” 예제를 따라해
dataflow.yml과 간단한 Rust 노드를 실행해 보세요.dora-node-api문서를 참고하면 노드 입출력 처리 코드 예제를 쉽게 찾을 수 있습니다.
2 2️⃣ 간단한 Dora 노드(Rust) 템플릿 + ROS2 연동 아키텍처(브릿지 예시 포함)
아래는 (1) dora-node-api 를 사용한 최소 실행 가능 Rust 노드 템플릿과 실행/배포 방법, 그리고 (2) ROS2 ⇄ Dora 연동(ros2-bridge)을 포함한 구체적 아키텍처와 예시 코드입니다. 필요한 공식 문서/레퍼런스도 함께 표기했습니다. 주요 개념과 명령은 Dora 공식 문서·API 문서를 기준으로 구성했습니다.
2.1 목표 요약
- Rust로 간단한 Dora 노드를 만들어
output토픽(데이터아이디)으로 바이트 데이터를 전송합니다. - 이 Dora 노드를 dora 데이터플로우(graph) 에 등록해 실행하고, 필요하면 ROS2와
dora-ros2-bridge를 통해 토픽을 주고받을 수 있게 합니다.
2.2 Rust 노드 템플릿 (실행 가능한 최소 예제)
프로젝트 구조 (예시)
my_first_dataflow/
├─ rust-heartbeat-node/
│ ├─ Cargo.toml
│ └─ src/
│ └─ main.rs
└─ graphs/
└─ dataflow.ymlCargo.toml (rust-heartbeat-node/Cargo.toml)
src/main.rs
use anyhow::Result;
use std::time::Duration;
use futures::StreamExt;
use tokio::time::sleep;
use dora_node_api::{DoraNode, MetadataParameters};
use dora_core::config::DataId;
#[tokio::main]
async fn main() -> Result<()> {
// Dora 런타임(데몬)이 설정한 환경변수로부터 노드를 초기화합니다.
// (dora가 노드를 spawn/관리하도록 dataflow.yml로 실행하는 것이 권장)
let (mut node, mut events) = DoraNode::init_from_env()
.expect("failed to init Dora node from env");
// dataflow.yml에서 정의한 output id와 일치시킵니다.
let output_id = DataId::from("heartbeat".to_owned());
let mut counter: u64 = 0;
loop {
// 전송할 바이트(예: u64 리틀엔디언)
let bytes = counter.to_le_bytes();
node.send_output_raw(
output_id.clone(),
MetadataParameters::default(),
bytes.len(),
|out_buf| {
out_buf.copy_from_slice(&bytes);
}
)?;
println!("Sent heartbeat {}", counter);
counter += 1;
// 이벤트(입력 등)를 비동기적으로 처리(여기선 간단히 drain)
// EventStream은 비동기 스트림입니다.
while let Ok(Some(evt)) = tokio::time::timeout(Duration::from_millis(0), events.next()).await {
// 실제 노드라면 Event::Input 등을 분기 처리
// (여기서는 예시라 간단히 로그)
println!("Got event: {:?}", evt);
}
sleep(Duration::from_millis(500)).await;
}
}설명·주의
DoraNode::init_from_env()는 dora 데몬(또는 dora-coordinator) 가 노드를 스폰할 때 설정해 주는 환경변수를 읽어 초기화합니다. (따라서 보통은dora start graphs/dataflow.yml등의 방식으로 실행합니다).send_output_raw는 제로-카피(raw buffer closure) 방식으로 바이트 버퍼를 채워 전송하므로 고성능 전송에 유리합니다.
2.3 간단한 dataflow.yml 예시 (graphs/dataflow.yml)
이 YAML은 Dora의 데이터플로우 스펙을 간단히 보여주는 예시입니다. 실제 필드 이름/옵션은 프로젝트 문서(데이터플로우 스펙)를 참고해 조정하세요.
실행 (예시)
참고: dora start/dora up 등 CLI 사용 예시는 공식 가이드와 예제 레포에서 자주 등장합니다.
2.4 ROS2와의 연동 — 아키텍처 & 실행 흐름 (구체적)
2.4.1 아키텍처 개요 (텍스트 다이어그램)
[ROS2 노드들] <--> [dora-ros2-bridge (프로세스)] <--> [Dora 런타임 / dataflow graph]
-> [Dora 노드: rust-heartbeat-node]
-> [Dora 노드: perception, model, recorder ...]dora-ros2-bridge는 ROS2 메시지를 런타임에 Apache Arrow struct로 변환하고, Dora 내부로(또는 반대로) 전달해 줍니다. 즉 colcon으로 빌드할 필요 없이 (런타임 변환으로) 기존 ROS2 토픽을 Dora 파이프라인에서 사용 가능하게 합니다.- Bridge를 통해 ROS2의 퍼블리셔/서브스크라이버는 Dora의 입출력 이벤트(데이터아이디)와 자연스럽게 매핑됩니다. (예:
/cmd_vel→ Dora output → 다른 Dora 노드에서 소비)
2.4.2 구체적 연동 예시 (Rust 쪽 코드 흐름 요약)
- Rust Dora 노드에서 ROS2 명령을 퍼블리시하려면
dora-ros2-bridge라이브러리의 ROS2 클라이언트를 사용합니다 (docs 예시 참조). 문서에 있는 예시(토이-예제: turtlesim 제어)는 다음 흐름입니다:ros2_client::Context생성 →new_node()→create_topic()&create_publisher()→ Dora 이벤트 루프에서 조건에 따라publisher.publish(msg)호출.
(문서에 제시된 Rust 예시 요약)
- ROS2 쪽에서
create_publisher<Twist>로 토픽을 만들고, Dora 노드의 이벤트(예: “tick” input)를 받아publisher.publish(twist)를 호출하는 방식으로 통합됩니다. 더불어 ROS2에서 들어오는 메시지는merge_external로 Dora 이벤트 스트림에 합쳐 처리할 수 있습니다.
2.4.3 Python 예시(간단) — 문서에서 가져온 흐름
import dora
from dora import Node
ros2_context = dora.Ros2Context()
ros2_node = ros2_context.new_node("turtle_teleop", "/ros2_demo", dora.Ros2NodeOptions(rosout=True))
turtle_twist_topic = ros2_node.create_topic("/turtle1/cmd_vel", "geometry_msgs/Twist", topic_qos)
twist_writer = ros2_node.create_publisher(turtle_twist_topic)
pose_reader = ros2_node.create_subscription("/turtle1/pose", "turtlesim/Pose", topic_qos)
dora_node = Node()
dora_node.merge_external_events(pose_reader)
for event in dora_node:
# Dora 이벤트/외부(ROS2) 이벤트 분기 처리
...(더 자세한 예시는 공식 가이드의 Bridging ROS2 페이지의 Python / Rust 예시를 참조하세요).
2.5 배포/실행 체크리스트 (실무 팁)
- ROS2 메시지 타입 접근: ros2-bridge가 ROS2 타입을 런타임 변환하려면 ROS2 환경(
source /opt/ros/<distro>/setup.bash또는 워크스페이스) 이 실행 환경에서 접근 가능해야 합니다. (bridge가 메시지 정보를 찾아 생성합니다). - dora-cli 사용: dora 데몬으로 dataflow를 시작하면 노드별 환경변수/소켓이 자동으로 설정되므로
DoraNode::init_from_env()호출이 정상 동작합니다. 로컬 테스트를 위해서는 dora-cli 문서의 Getting Started 절차를 따르세요. - 메시지 포맷: Dora 내부/브리지 사이에서는 Arrow 포맷을 쓰는 것을 권장(제로-카피 이점). ROS2 브릿지가 Arrow struct로 변환해줍니다.
- 디버깅: FOSDEM/발표 자료 및 GitHub 이슈·문서에 있는 예제(토이 예제: turtlesim 등)를 먼저 실행해 보면 설정·빌드 문제를 빠르게 잡을 수 있습니다.
중요한 문서·레퍼런스 (직접 읽어볼 곳)
- dora Node API (Rust docs) —
DoraNode,send_output_raw,init_from_env()설명. - Getting started (dora 공식 문서) — 워크스페이스/데이터플로우 실행 가이드.
- Bridging ROS2 (가이드 페이지, Python/Rust 예시 포함) — ros2-bridge 개념과 코드 예시(토이 예제 포함). (ROS2 연동의 핵심 예시가 이 페이지에 있음).
- dora GitHub (코드·예제·릴리스).
- Dataflow 스펙(데이터플로우 YAML).
3 3️⃣ Advanced
(1) 실행 가능한 Rust Dora 노드 템플릿, (2) ROS2 ⇄ Dora 연동(브릿지) 완전 예제, (3) 컨테이너화(Docker + docker-compose) 를 한 번에 정리해서 드립니다. 아래는 바로 복사·붙여넣어 사용 가능한 파일들(모든 코드와 Docker 구성), 빌드/실행 명령, 운영 팁과 주의사항을 정리한 것입니다. 핵심 근거(문서)는 문장 끝에 표시합니다.
핵심 문서 참조:
- Dora Rust 노드 API (
DoraNode::init_from_env,send_output_raw) 문서.- Dora 공식 가이드(데이터플로우 스펙, Getting started, Bridging ROS2).
- Dora 릴리스/설치(바이너리 다운로드 안내).
- Dora ROS2 bridge 관련 설명(브리지가 ROS2 메시지 타입을 런타임으로 생성하는 방식).
- ROS2 공식 Docker 가이드(컨테이너에서 ROS2 실행 관련).
3.1 요약
- Rust로 만든
heartbeatDora 노드(제로카피 전송)를 포함한 예제 워크스페이스. - ROS2(파이썬) 퍼블리셔/서브스크라이버 예제 + Dora 쪽 dataflow 설정으로 브리지하는 구성 예시(설정·설명 포함).
- Dockerfile들 및
docker-compose.yml로 ROS2, dora(coordinator), rust node를 컨테이너로 띄우는 템플릿(호스트 네트워크 권장).
3.2 A. 완전한 “간단한 Dora 노드 (Rust) 템플릿” (실행 가능한 예제)
프로젝트 루트: my_dora_project/
my_dora_project/
├─ dora-workspace/ # optional: Dora workspace / graph 파일 저장소
│ └─ graphs/
│ └─ dataflow.yml
├─ rust-heartbeat-node/ # Rust node
│ ├─ Cargo.toml
│ └─ src/
│ └─ main.rs
├─ docker/ # Dockerfile 예시(아래 C 항목과 중복 가능)
└─ ros2_py_pkg/ # ROS2 Python package (토이 퍼블리셔/서브스크라이버)
├─ package.xml
├─ setup.py
├─ resource/
└─ ros2_py_pkg/
├─ __init__.py
├─ talker.py
└─ listener.py3.2.1 Rust 노드(코드) — rust-heartbeat-node
rust-heartbeat-node/Cargo.toml
(참고: dora-node-api와 dora-core 버전은 문서/크레이트에서 최신 버전 확인하세요).
rust-heartbeat-node/src/main.rs
use anyhow::Result;
use std::time::Duration;
use tokio::time::sleep;
use futures::StreamExt;
use dora_node_api::{DoraNode, MetadataParameters};
use dora_core::config::DataId;
#[tokio::main]
async fn main() -> Result<()> {
// Dora 데몬이 설정한 환경변수에서 노드 초기화 (일반적으로 dora가 노드를 스폰)
let (mut node, mut events) = DoraNode::init_from_env()
.expect("failed to init Dora node from env");
// dataflow.yml에서 정의한 output id와 일치시킵니다.
let output_id = DataId::from("heartbeat".to_owned());
let mut counter: u64 = 0;
loop {
// 전송할 바이트(예: u64 리틀엔디언)
let bytes = counter.to_le_bytes();
// zero-copy 전송: 클로저로 제공된 버퍼에 직접 채워 보냄
node.send_output_raw(
output_id.clone(),
MetadataParameters::default(),
bytes.len(),
|out_buf| {
out_buf.copy_from_slice(&bytes);
}
)?;
println!("Sent heartbeat {}", counter);
counter += 1;
// (선택) 이벤트 스트림 처리(예: 입력, control 이벤트)
// 여기서는 짧게 드레인만 합니다.
while let Ok(Some(evt)) = tokio::time::timeout(Duration::from_millis(0), events.next()).await {
println!("Dora event: {:?}", evt);
}
sleep(Duration::from_millis(500)).await;
}
}3.2.1.1 빌드/로컬 실행(개발자 모드)
- Rust 빌드:
- Dora 런타임으로 실행하려면
dataflow.yml로 dora가 노드를 spawn 하도록 실행(아래 dataflow 예시 참조).DoraNode::init_from_env()는 dora가 설정한 환경변수에서 연결 정보를 읽습니다.
3.2.2 간단한 dataflow.yml (dora-workspace/graphs/dataflow.yml)
이 YAML은 Dora의 데이터플로우 스펙을 간단히 사용 가능한 형태로 정리한 예시입니다. 실제 스펙 필드는 공식 문서의 Dataflow Configuration을 참고해 확장/조정하세요.
path는 dora가 실행(스폰)할 노드 바이너리의 경로입니다. (절대경로/컨테이너 내 경로를 사용해도 됩니다).
3.3 B. ROS2와 연동하는 구체적 아키텍처 설계(브릿지 예시 포함)
아래는 토이 시나리오입니다:
- ROS2 쪽:
ros2_py_pkg라는 파이썬 패키지에talker.py(퍼블리셔,/cmd_vel또는 토픽 이름 예시)와listener.py(서브스크라이버)를 둡니다. - Dora 쪽:
rust_heartbeat가 보내는heartbeat데이터를 Dora 내부에서 소비하거나,dora-ros2-bridge를 통해 ROS2 토픽으로 publish 할 수 있습니다. - Bridge는 Dora 런타임의 확장(libraries/extensions/ros2-bridge)으로 동작하며, ROS2 메시지 타입을 런타임에서 생성/매핑해줍니다.
3.3.1 ROS2 Python 퍼블리셔/서브스크라이버 (토이)
ros2_py_pkg/package.xml (간단)
<?xml version="1.0"?>
<package format="3">
<name>ros2_py_pkg</name>
<version>0.0.0</version>
<description>toy ros2 python pub/sub for dora example</description>
<maintainer email="you@example.com">you</maintainer>
<license>Apache-2.0</license>
<depend>rclpy</depend>
<depend>geometry_msgs</depend>
</package>ros2_py_pkg/setup.py
from setuptools import setup
package_name = 'ros2_py_pkg'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages', ['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='you',
maintainer_email='you@example.com',
description='ROS2 python toy pub/sub',
license='Apache-2.0',
entry_points={
'console_scripts': [
'talker = ros2_py_pkg.talker:main',
'listener = ros2_py_pkg.listener:main',
],
},
)ros2_py_pkg/ros2_py_pkg/talker.py (퍼블리셔)
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
class Talker(Node):
def __init__(self):
super().__init__('dora_talker')
self.pub = self.create_publisher(Twist, '/dora/cmd_vel', 10)
self.timer = self.create_timer(0.5, self.on_timer)
self.cnt = 0
def on_timer(self):
msg = Twist()
msg.linear.x = 0.1 * (self.cnt % 10)
msg.angular.z = 0.01 * (self.cnt % 20)
self.pub.publish(msg)
self.get_logger().info(f'Published cmd_vel: linear.x={msg.linear.x:.2f}')
self.cnt += 1
def main():
rclpy.init()
node = Talker()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
rclpy.shutdown()ros2_py_pkg/ros2_py_pkg/listener.py (서브스크라이버)
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
class Listener(Node):
def __init__(self):
super().__init__('dora_listener')
self.sub = self.create_subscription(Twist, '/dora/cmd_vel', self.cb, 10)
def cb(self, msg):
self.get_logger().info(f'Recv cmd_vel: linear.x={msg.linear.x:.3f}, angular.z={msg.angular.z:.3f}')
def main():
rclpy.init()
node = Listener()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
rclpy.shutdown()위 ROS2 예제는 ROS2 공식 튜토리얼(토이 예제, turtlesim 등)과 동일한 기본 패턴을 따릅니다. 컨테이너화/실행은 ROS2 Docker 가이드 권장사항을 따르세요. ([ROS Documentation][11])
3.3.2 Dora ↔︎ ROS2 브리지를 통한 매핑(설계 & 예시)
Dora의 Bridging 개념 요약:
- Dora의 ROS2 bridge는 ROS2 메시지 타입을 런타임에서 찾아 Dora API로 이용 가능한 함수(
create_topic_<TYPE>등)를 자동 생성합니다. 즉 Dora 쪽에서 ROS2 토픽을 퍼블리시/구독할 수 있게 해줍니다.
3.3.2.1 예시 시나리오
- Dora 내부에서
heartbeat데이터를 ROS2std_msgs/Int64형태로 변환해/dora/heartbeat토픽으로 publish. - ROS2
talker는 Dora를 모르는 상태로 동작(또는 반대로).
Dora 쪽에서 ROS2 publish를 하려면 보통
dora-ros2-bridgeextension을 활성화하거나, Dora 런타임을 빌드할 때 bridge 확장을 포함시켜야 합니다(문서/빌드 가이드 참조). ([GitHub][12])
3.3.2.1.1 대략적 흐름(의사 코드)
- Dora 노드(예: Rust 또는 Python)에서 ros2-contex를 초기화 →
new_node(...)→create_publisher_std_msgs_int64("/dora/heartbeat")→ Dora event loop에서 publish.
Dora C++/Rust API 문서에 따르면 브리지 쪽에
create_topic_<TYPE>혹은 자동 생성된 함수를 통해 topic을 만들 수 있다고 문서에 나와 있습니다. 아래 예시는 개념을 위한 의사 코드이며, 실제 함수 시그니처는 브리지 버전/문서 확인 후 사용하세요.
3.4 C. 컨테이너화 (Docker + docker-compose) — ROS2 + Dora + Rust node
권장: ROS2 (DDS) 및 하드웨어 접근성 때문에
network: host모드를 추천합니다. 자세한 이유와 권장 방법은 ROS2 Docker 문서 참조.
프로젝트에 포함할 예시 docker/ 파일들(간단 버전):
3.4.1 docker/Dockerfile.dora — dora 데몬/CLI (간단: release 바이너리 사용)
# dora coordinator image (lightweight)
FROM ubuntu:22.04
ARG DORA_VERSION="v0.3.0" # 실제 최신 릴리스 태그로 바꾸세요
WORKDIR /opt/dora
# 기본 툴 설치
RUN apt-get update && apt-get install -y curl unzip ca-certificates && rm -rf /var/lib/apt/lists/*
# GitHub release에서 바이너리 다운로드(문서 권장 방식)
# 실제 릴리스 파일명은 GitHub Releases 페이지에서 확인하세요.
RUN curl -L -o /tmp/dora.zip "https://github.com/dora-rs/dora/releases/download/${DORA_VERSION}/dora-${DORA_VERSION}-x86_64-Linux.zip" \
&& unzip /tmp/dora.zip -d /opt/dora \
&& rm /tmp/dora.zip
ENV PATH="/opt/dora:${PATH}"
# 기본 포트/파일 시스템 마운트는 docker-compose에서 설정
CMD ["dora", "--help"]- dora 설치 안내는 공식 문서에서 “Release zip download” 방식을 권장합니다. (위 Dockerfile은 그 권장 방식을 자동화).
주의: DORA_VERSION은 실제 Release 태그(예: v0.3.0)로 바꾸세요. GitHub Releases 페이지를 확인하십시오.
3.4.2 docker/Dockerfile.ros2 — ROS2 (humble) 컨테이너
- ROS2 공식 Docker 사용 가이드는 컨테이너에서 ROS2를 테스트/개발할 때
host네트워킹을 권장하거나 환경을 맞춰주는 사례를 제시합니다.
3.4.3 docker/Dockerfile.rustnode — Rust 노드를 빌드해 런타임 바이너리만 담는 다단계 빌드
# builder
FROM rust:1.73 as builder
WORKDIR /usr/src/app
COPY ./rust-heartbeat-node/ ./rust-heartbeat-node/
WORKDIR /usr/src/app/rust-heartbeat-node
RUN cargo build --release
# runtime
FROM debian:bookworm-slim
COPY --from=builder /usr/src/app/rust-heartbeat-node/target/release/rust_heartbeat_node /usr/local/bin/rust_heartbeat_node
WORKDIR /app
CMD ["/usr/local/bin/rust_heartbeat_node"]3.4.4 docker-compose.yml (간단 템플릿)
version: '3.8'
services:
dora:
build:
context: ./docker
dockerfile: Dockerfile.dora
container_name: dora_coordinator
network_mode: "host"
volumes:
- ./dora-workspace:/work/dora-workspace
environment:
- TZ=Asia/Seoul
ros2:
build:
context: ./docker
dockerfile: Dockerfile.ros2
container_name: ros2_core
network_mode: "host"
volumes:
- ./ros2_py_pkg:/work/ros2_py_pkg
working_dir: /work
command: /bin/bash -c "cd ros2_py_pkg && /bin/bash -lc 'pip3 install -e . && ros2 run ros2_py_pkg talker'"
rustnode:
build:
context: .
dockerfile: docker/Dockerfile.rustnode
container_name: rust_heartbeat_node
network_mode: "host"
depends_on:
- doranetwork_mode: "host": ROS2 DDS와 dora의 네트워크/IPC를 간단하게 접근하기 위해 권장합니다. (Docker와 DDS는 네트워크/포트 매핑/멀티호스트에서 복잡함을 유발할 수 있어 호스트 네트워크를 사용하는 것이 간단함).- 볼륨 마운트로 ROS2 패키지 소스와 dora 그래프를 공유하도록 했습니다.
3.5 전체 실행 절차
- 코드/파일 복사: 위 파일들을 로컬
my_dora_project/구조로 배치. - Rust 빌드 & 바이너리 확인(로컬에서 먼저 확인 권장):
주의:
DoraNode::init_from_env()는 dora 런타임이 설정한 환경변수가 필요합니다. 로컬에서 독립적으로 테스트하려면(데몬 없이)init_from_env대신DoraNode::init_dummy()같은 개발 헬퍼가 문서에 있는지 확인하거나, 수동으로 환경변수를 설정해야 합니다(개발 시점의 문서 참고).
- Docker 빌드/실행 (프로젝트 루트에서):
- dora graph 실행: (컨테이너 안에서 또는 호스트에서)
dora 설치/릴리스 다운로드/CLI 사용법은 공식 설치 가이드를 확인하세요.
- ROS2 퍼블리셔/서브스크라이버 동작 확인:
ros2서비스 컨테이너가talker를 시작하도록docker-compose에 적어놨다면 (혹은 호스트에서 직접):
3.6 구현/운영 팁 & 트러블슈팅
- Dora 브리지 사용: Dora ROS2 bridge는 Dora 소스의
libraries/extensions/ros2-bridge에 통합되어 개발/배포되는 기능입니다. 빌드/사용 시 브리지 확장이 포함되었는지 확인하세요. ([GitHub][12]) - Zero-copy 장점:
send_output_raw같은 API는 버퍼 클로저로 직접 데이터를 채워 전송(제로카피)하므로 저지연/고성능 파이프라인에 유리합니다. 이를 활용해 대용량 센서(이미지, 라이다) 전송 시 복사 비용을 줄이세요. - ROS2 + Docker: DDS 네이티브 동작을 위해
network_mode: host를 권장합니다. 멀티 호스트/보안이슈가 있다면 추가 네트워크/두 컨테이너 간 bridge 설정·ROS2의 RTPS 설정을 조정해야 합니다. - 권한/디바이스: 실 하드웨어(예: GPU, USB 카메라 등)를 컨테이너에 붙일 경우
--device옵션 혹은 nvidia-docker 런타임이 필요합니다(예: carla 등 dora-drives 예제). ([Dora RS][14])
3.7 추가 자료(바로 확인해야 할 문서 링크 요약)
- Dora Guides (Getting started, Bridging ROS2 등).
- Dora Dataflow Configuration (YAML 스펙).
- Dora Rust API docs (
DoraNode,send_output_raw,init_from_env). - Dora GitHub (소스/릴리스).
- ROS2 Docker 실행 가이드.
- ZIP 안에 포함된 것: Rust Dora 노드 템플릿, dataflow.yml, ROS2(파이썬) 퍼블리셔·서브스크라이버, Dockerfile들, docker-compose.yml (모두 즉시 복사·붙여넣어 사용 가능).
- Dora 관련 버전(파일 내 기본값):
- Dockerfile의 DORA_VERSION은 v0.3.13(GitHub 최신 릴리스 기준).
- Cargo.toml은 dora-node-api = “0.3.13”, dora-core = “0.3.13”으로 설정해 두었습니다.
- dora-ros2-bridge 관련 코드는 주석으로 남겨두었으니, 로컬에 설치된 브리지 버전에 맞춰 주석을 해제하고 버전을 맞추세요(브리지의 시그니처는 버전별로 달라질 수 있습니다)
- Dora — 공식 홈페이지 (Introduction)
- Dora main site (dora-rs.ai)
- Getting started — dora-rs
- Guides — dora-rs
- Installing — dora-rs (Guides → Installing)
- Dataflow Configuration — dora (docs)
- Dataflow Configuration — dora (alternate page)
- Rust API — dora (Rust API page)
- dora_node_api — docs.rs (crate docs)
- DoraNode struct — docs.rs (DoraNode API)
- dora-node-api — crates.io (package)
- dora GitHub — repository
- dora Releases — GitHub Releases
- dora-ros2-bridge — GitHub (bridge repo)
- dora-drives — installation (dora-drives docs)
- dora-drives — GitHub (repo)
- dora-lerobot — GitHub (Lerobot with dora)
- FOSDEM — “Modern Dataflow Framework for Robotics” (PDF slides)
- Running ROS 2 nodes in Docker (community guide, Foxy)
- Using turtlesim, ros2, and rqt (tutorial, Foxy)