📘 [IsaacSim 6.0] Reference Information 정리
API Documentation 노트에 이어, 알아두면 두고두고 유용한 Reference Information(참고 정보)을 정리합니다. 단위·좌표계 규약, 핵심 용어 사전, 렌더링 모드, 성능, 그리고 IsaacSim의 토대인 Omniverse·USD가 핵심입니다.
본 글은 NVIDIA 공식 문서를 학습하며 핵심을 한국어로 요약·정리한 노트입니다. 정확한 원문은 각 절 끝의 🔗 링크를 참고하세요.
📐 Isaac Sim Conventions (규약)
시뮬레이션에서 가장 헷갈리기 쉬운 단위와 좌표계 규약입니다. 특히 좌표계는 컨텍스트(World/USD/ROS)마다 다르니 주의가 필요합니다.
단위 (SI)
- 길이 m, 질량 kg, 시간 s (SI 단위)
- 기본 물리 타임스텝 1/60 s
- 힘은 N(뉴턴), stiffness·damping은 그에 맞게 스케일
좌표계 (Right-handed)
- World frame: +X = forward, +Z = up (일반 그래픽스의 +Y up과 다름!)
- USD 카메라 prim: +Y up, -Z forward
- 즉 컨텍스트에 따라 World / USD / ROS 세 가지 축 표현이 존재
| 컨텍스트 | up | forward |
|---|---|---|
| World | +Z | +X |
| USD (camera) | +Y | -Z |
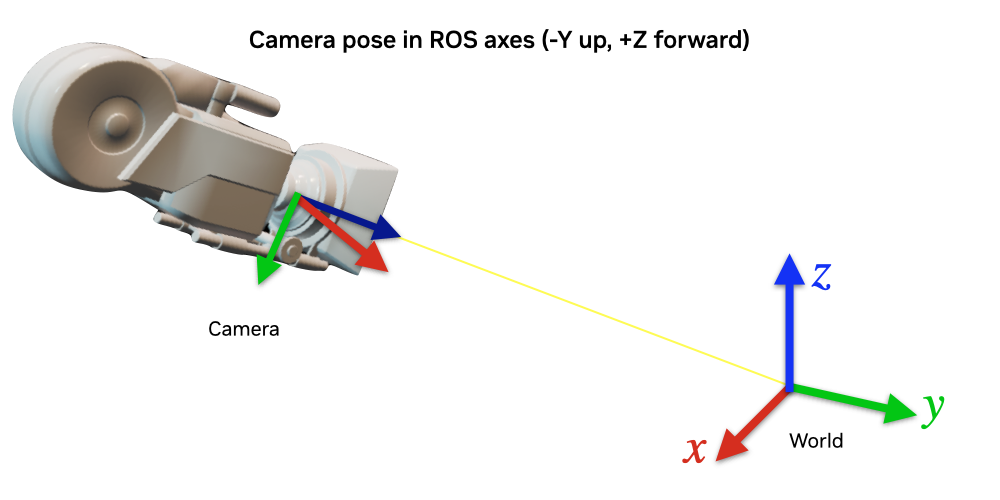
| ROS (camera) | -Y | +Z |
💡 IsaacSim 카메라 좌표 → ROS 카메라 좌표 변환은 X축 기준 180° 회전.
| World Frame | Camera Frame |
|---|---|
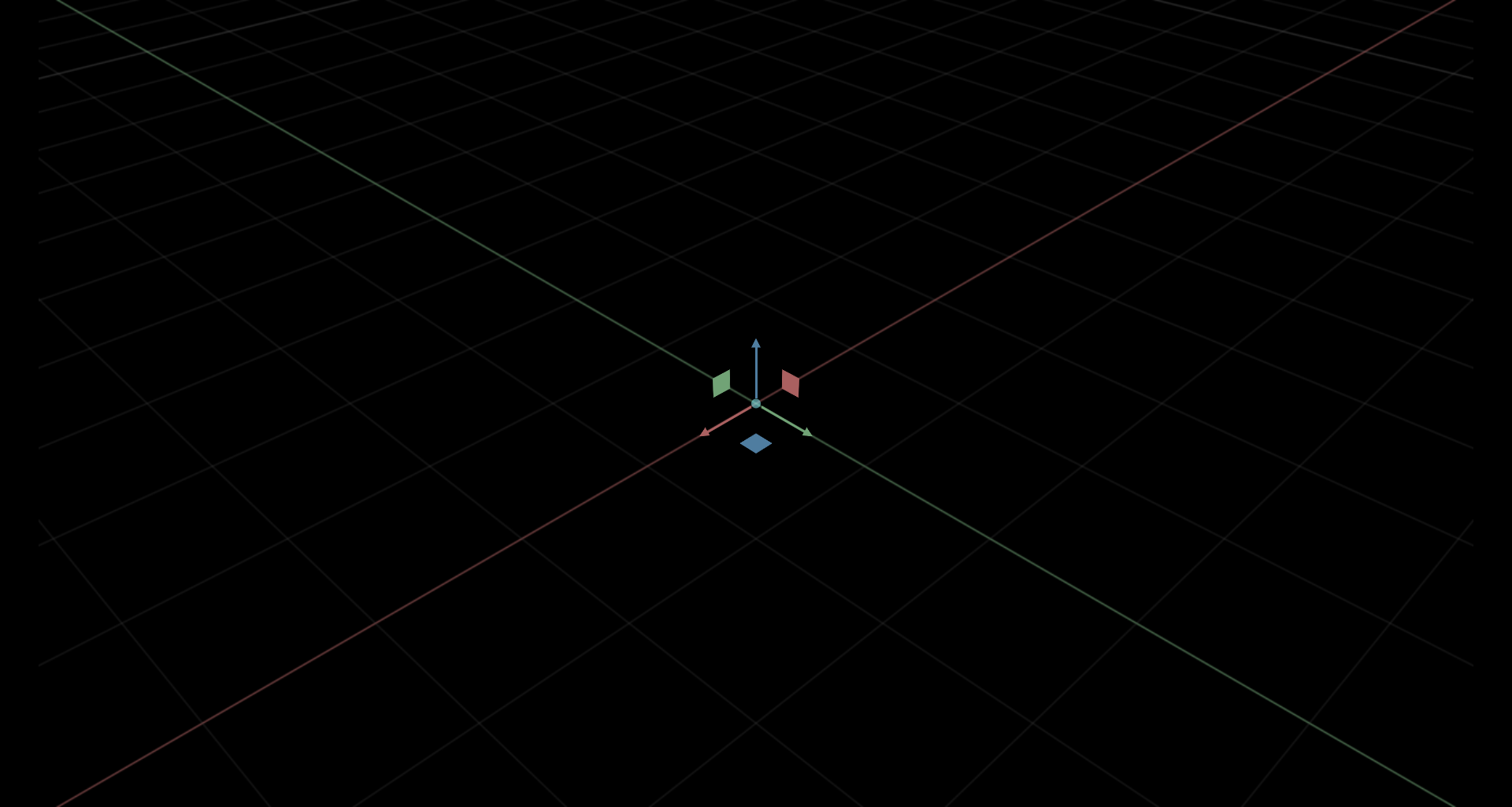 |
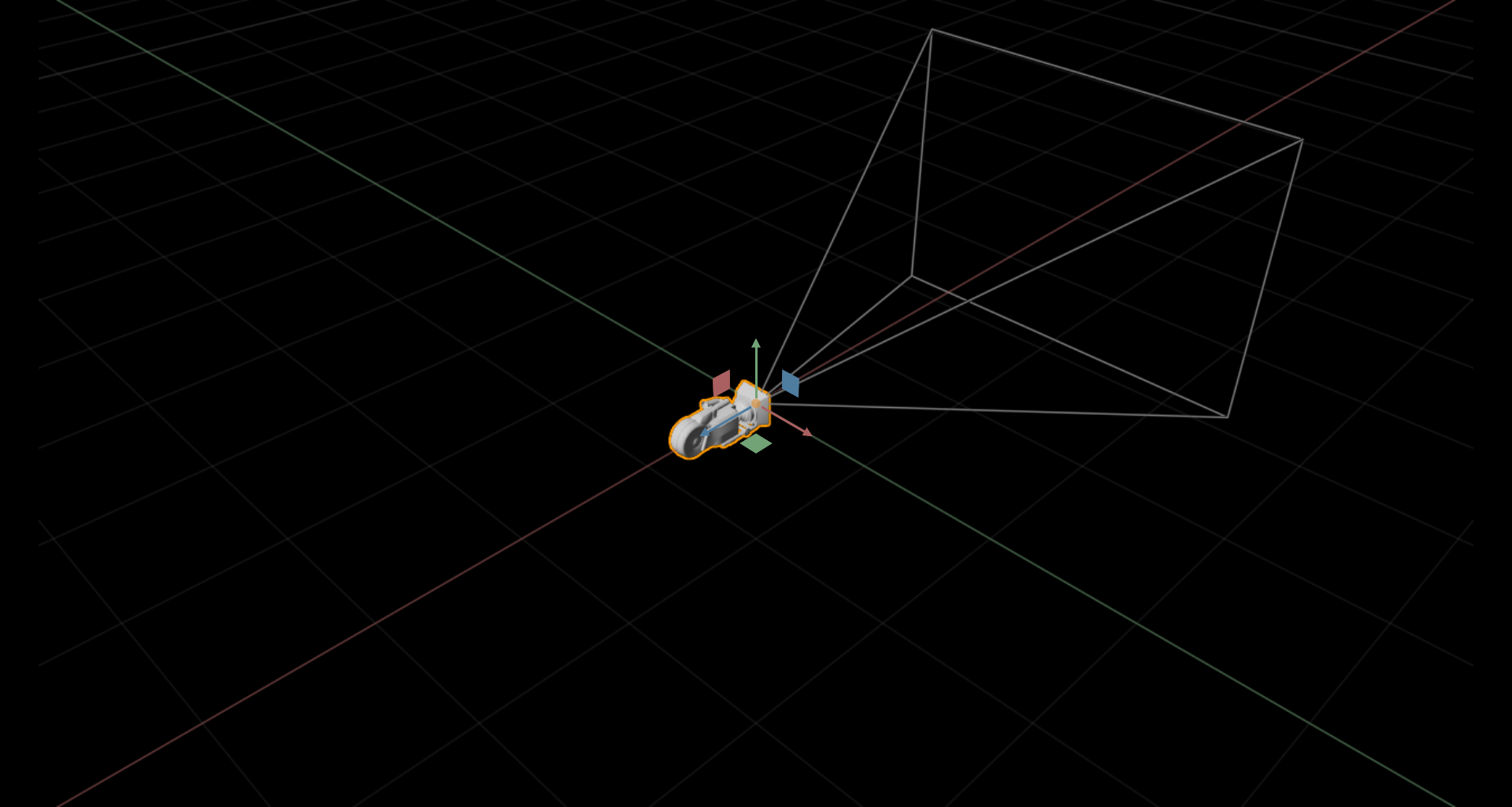 |
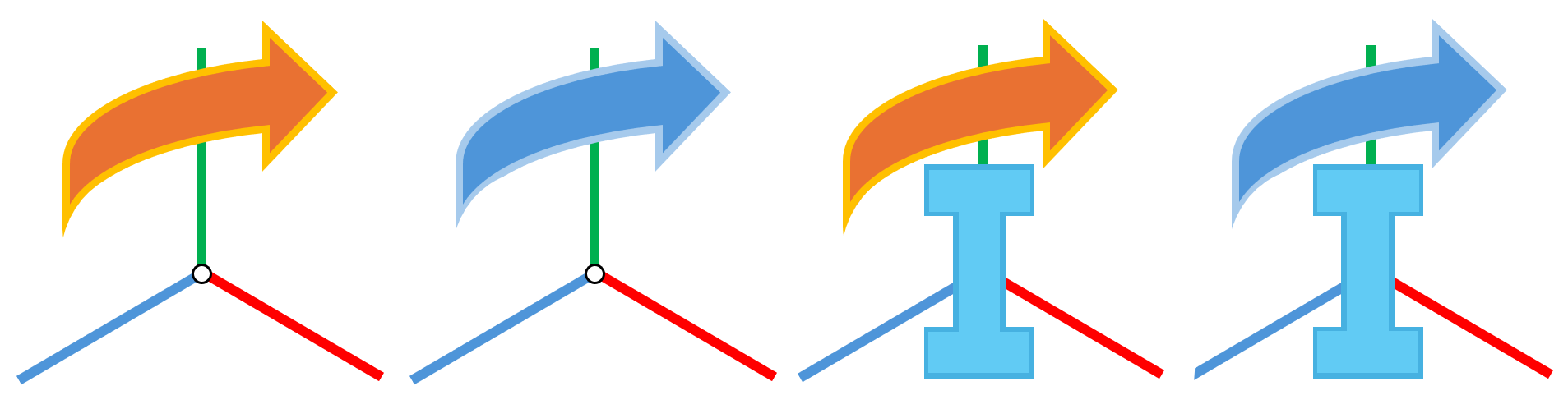
카메라 좌표계 변환(World / USD / ROS) 비교:
| World 축 | USD 축 | ROS 축 |
|---|---|---|
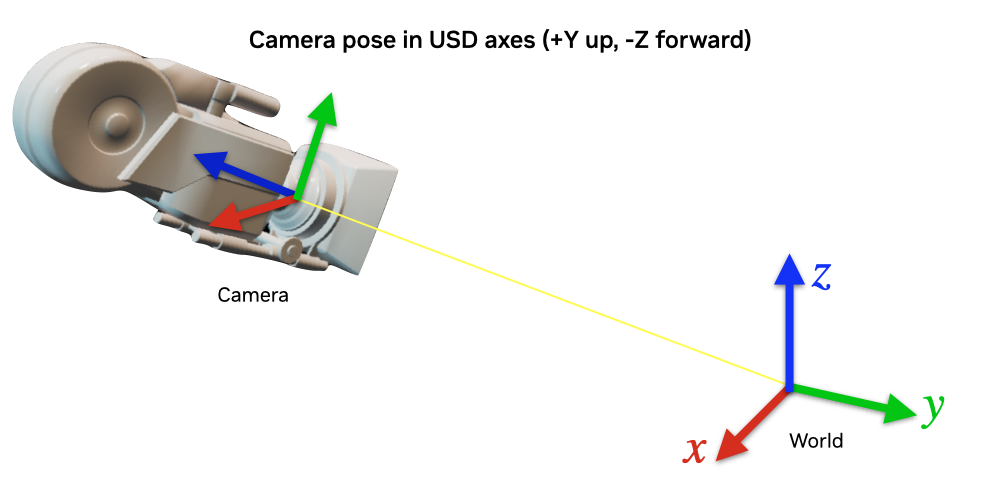 |
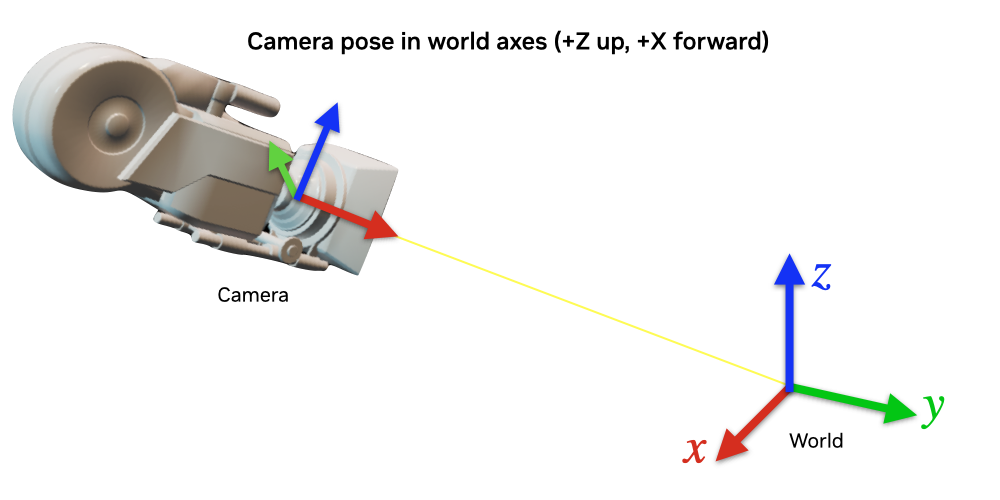 |
 |
🖼️ 위 이미지들의 출처는 NVIDIA Isaac Sim 공식 문서입니다.
회전·기타
- 쿼터니언: core API·USD는 (QW, QX, QY, QZ), 단 PhysX는 (QX, QY, QZ, QW)
- 각도: 물리 계산은 radian 기본, USD 속성 표시는 degree
- 행렬: row-major
- 합성 데이터 이미지 원점 (0,0) = 좌상단(컴퓨터 비전 관례)
🔗 원문: Isaac Sim Conventions
📖 Glossary (용어 사전)
IsaacSim·Omniverse를 이해하는 핵심 용어들입니다.
| 용어 | 의미 |
|---|---|
| USD | Universal Scene Description. Pixar가 만든 확장성 높은 오픈소스 3D 씬 기술 포맷 |
| Prim | USD의 기본 컨테이너 객체. 다른 prim·속성을 담아 stage 상의 계층 namespace를 형성 |
| Stage | 루트 USD 파일과 참조·레이어된 파일들이 컴포즈된 scenegraph(Stage 창에 계층 표시) |
| Schema | USD에서 데이터 구조·검증 방식을 정의하는 틀 |
| Nucleus | publish/subscribe 기반으로 에셋·가상 월드를 실시간 공유·수정하는 Omniverse 핵심 서비스 |
| Kit | Carbonite 기반으로 네이티브 Omniverse 앱·마이크로서비스를 빌드하는 툴킷(Python 스크립팅 지원) |
| Carbonite (carb) | 플러그인 관리, 입력, 파일 접근, 태스크 관리 등 코어 기능을 제공하는 C++ SDK |
| OmniGraph | 로직·워크플로우를 만드는 노드 기반 비주얼 시스템 |
| Extension | Omniverse Kit의 기능을 확장하는 플러그인(소스 전체 제공) |
| PhysX | NVIDIA의 확장형 멀티플랫폼 물리 시뮬레이션 솔루션 (rigid body·articulation) |
| Articulation | 회전 조인트로 연결된 로봇(매니퓰레이터·다리·바퀴). Articulation 클래스로 다룸 |
| MDL | Material Definition Language. 머티리얼 할당·파라미터를 표현하는 NVIDIA USD schema |
| RTX | Real-Time(고품질)·Path Tracing(최고 품질·물리 정확) 두 렌더링 모드 |
🔗 원문: Glossary
🎬 Rendering Modes
IsaacSim은 RTX 렌더러 기반으로 두 가지 모드를 제공합니다.
- Real-Time (Interactive): 빠른 인터랙션을 위한 고품질 실시간 렌더링. 일반적인 작업·시뮬레이션에 사용.
- Path Tracing: 물리적으로 정확한 최고 품질 렌더링. 합성 데이터의 사실성(photorealism)이 중요할 때 사용.
🔗 원문: Rendering Modes
🚀 Performance & Benchmarks
- Performance Optimization Handbook: 시뮬레이션 성능을 끌어올리기 위한 설정·전략 모음(렌더링 모드 선택, 물리 스텝, 헤드리스 실행, GPU 활용 등).
- Benchmarks: 다양한 시나리오에서의 표준 성능 측정치. 하드웨어·설정에 따른 기대 성능을 가늠하는 기준.
💡 대규모 RL 학습·합성 데이터 생성처럼 무거운 작업에서는 헤드리스 + 적절한 물리 스텝 + 렌더링 최소화가 성능의 핵심입니다.
🌐 Omniverse and USD
IsaacSim의 토대가 되는 Omniverse·USD를 이해하면 전체 그림이 잡힙니다.
- USD Fundamentals: prim·attribute·relationship, layer·composition(sublayer/reference/payload/variant) 등 USD 기본
- Working with USD: Python(
pxrAPI)으로 stage·prim 생성·수정 - USD Tools: USD 파일 조회·편집 도구
- C++ Plugins & Schemas: 커스텀 USD schema·플러그인 작성
💡 Concepts 노트의 Asset Structure에서 본 레이어링·컴포지션이 바로 이 USD 개념의 응용입니다.
🔗 원문: Omniverse and USD
정리
- Conventions: SI 단위, World(+X fwd, +Z up)·USD·ROS 좌표계 구분, 쿼터니언 순서(core=WXYZ / PhysX=XYZW) 주의.
- Glossary: USD·Prim·Stage·Nucleus·Kit·Carb·PhysX·Articulation·MDL·RTX.
- Rendering: Real-Time vs Path Tracing.
- Performance/Benchmarks: 헤드리스·물리 스텝·렌더링 최적화가 핵심.
- Omniverse & USD: IsaacSim의 토대. 레이어링·컴포지션 개념이 에셋 구조로 이어짐.
다음 노트에서는 마지막으로 Common(Feedback/Forums, Data Collection, Licenses)을 정리합니다.