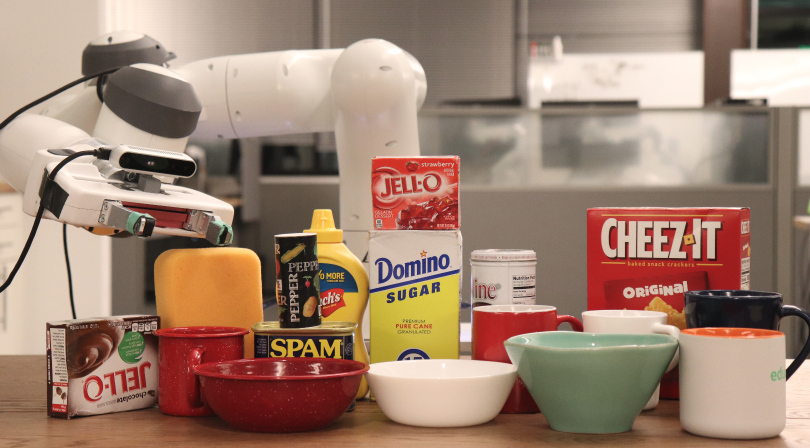
flowchart LR
PC["Object Point Cloud X<br/>(depth camera)"] --> SAMP
subgraph SAMP["1 Variational Grasp Sampler (VAE)"]
Z["z ~ N(0,I)"] --> DEC["Decoder P"]
PC2["X"] --> DEC
DEC --> G["다양한 grasp 집합<br/>g=(R,T)∈SE(3)"]
end
G --> EVAL
subgraph EVAL["2 Grasp Evaluator (PointNet)"]
E["P(S|g,X)<br/>성공 확률"]
end
EVAL --> REF
subgraph REF["3 Iterative Refinement"]
R["Δg = η·(∂S/∂g)<br/>반복 개선"]
end
R -.->|개선된 grasp| EVAL
REF --> OUT["임계값 이상<br/>고품질 grasp 집합"]
📃6DOF GraspNet
grasp
pointcloud
vae
manipulation
6-DOF GraspNet: Variational Grasp Generation for Object Manipulation
- 🤖 이 연구는 3D 포인트 클라우드를 기반으로 로봇 객체 조작을 위한 6-DOF grasp pose를 생성하며, Variational Autoencoder (VAE)를 활용한 Grasp Sampler와 Grasp Evaluator를 통한 반복적인 정제 과정을 제안합니다.
- ⚙️ Grasp Sampler는 다양한 grasp를 생성하고 Grasp Evaluator는 grasp의 성공 확률을 평가하며, 이 평가 모델의 기울기를 사용하여 샘플링된 grasp를 효과적으로 개선합니다.
- 🏆 제안된 모델은 순수하게 시뮬레이션에서 학습되었음에도 불구하고 실제 로봇 실험에서 다양한 객체에 대해 88%의 높은 성공률을 달성하며, 기존 접근 방식보다 우수한 성능을 보였습니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
본 논문은 로봇 객체 조작을 위한 grasp pose 생성을 목표로 하며, 이를 Variational Autoencoder (VAE)를 활용한 grasp sampling 문제로 정의하고, grasp evaluator model을 통해 샘플링된 grasps를 평가하고 개선하는 방법을 제안합니다. Grasp Sampler와 Grasp Refinement 네트워크 모두 depth 카메라로 관측된 3D point cloud를 입력으로 사용합니다.
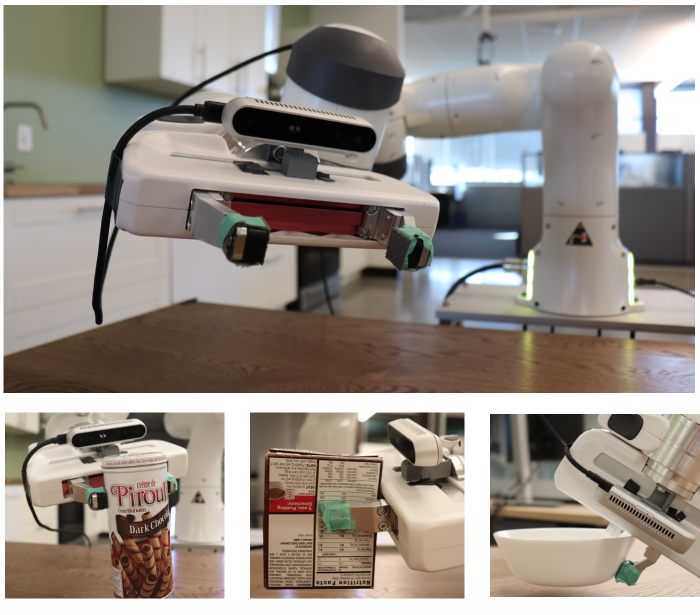
논문 그림 1 — 실험에 사용된 7-DOF Franka Panda 로봇 팔과 다양한 일반 객체. 순수 시뮬레이션으로 학습한 모델이 미지 객체를 실제로 집는다.
핵심 방법론은 두 가지 주요 네트워크 아키텍처로 구성됩니다:
- Grasp Sampler (Variational Autoencoder, VAE): 관측된 객체의 부분적인 point cloud로부터 다양한 grasp set를 생성합니다.
- Grasp Evaluator Network: 생성된 grasp의 품질을 평가하고, 그 기울기(gradient)를 사용하여 grasp 샘플을 개선합니다.
1. 6-DOF Grasp Pose 생성 (6-DOF Grasp Pose Generation)
Grasp pose 생성은 로봇 그리퍼가 특정 객체를 안정적으로 잡기 위한 6-DOF (3D translation 및 3D orientation) 자세를 생성하는 과정입니다. Grasp는 객체 기준 프레임(\bar{X}, 객체 point cloud의 질량 중심)에서 정의되며, 그 축은 카메라 프레임과 평행합니다. 본 논문은 성공적인 grasp 공간 \mathcal{G}^*의 후방 분포 P(\mathcal{G}^* | X)를 학습하는 것을 목표로 하며, 여기서 X는 객체의 부분 point cloud입니다. 성공적인 grasp의 분포는 복잡하고 불연속적일 수 있습니다.
1.1. Variational Grasp Sampler
Grasp sampler는 P(\mathcal{G} | X)의 가능성을 최대화하는 생성 모델입니다.
- 입력: 객체의 point cloud X와 잠재 변수 z.
- 출력: 예측된 grasp \hat{g}.
- 잠재 공간 (z): P(z) = \mathcal{N}(0, I)로 가정합니다. 서로 다른 z를 샘플링하여 다양한 grasps를 생성합니다.
- 목표 함수: Encoder Q(z | X, g)는 각 (point cloud X, grasp g) 쌍을 잠재 공간의 작은 부분 공간으로 매핑합니다. Decoder는 샘플링된 z \sim Q로부터 grasp \hat{g}를 재구성합니다. 훈련 중에는 ground truth grasp g와 재구성된 grasp \hat{g} 사이의 재구성 손실 \mathcal{L}(\hat{g}, g)을 최소화하고, Q(\cdot|\cdot) 분포와 정규 분포 \mathcal{N}(0, I) 사이의 KL-divergence D_{KL}를 최소화합니다. \mathcal{L}_{vae} = \sum_{z \sim Q, g \sim \mathcal{G}^*} \mathcal{L}(\hat{g}, g) - \alpha D_{KL} [Q(z|X, g), \mathcal{N}(0, I)] 재구성 손실은 그리퍼의 미리 정의된 점들 p의 변환을 사용하여 정의됩니다: \mathcal{L}(g, \hat{g}) = \frac{1}{n} \sum ||T(g; p) - T(\hat{g}; p)||_1 추론 시에는 encoder Q는 제거되고, 잠재 값은 \mathcal{N}(0, I)에서 샘플링됩니다.
- 네트워크 아키텍처: PointNet++ [24]를 기반으로 하며, 각 포인트는 3D 좌표와 특징 벡터를 가집니다. Encoder에서는 입력 포인트 x \in X의 특징이 g = [R, T]에 연결됩니다. Decoder에서는 각 포인트 특징이 잠재 변수 z에 연결됩니다.
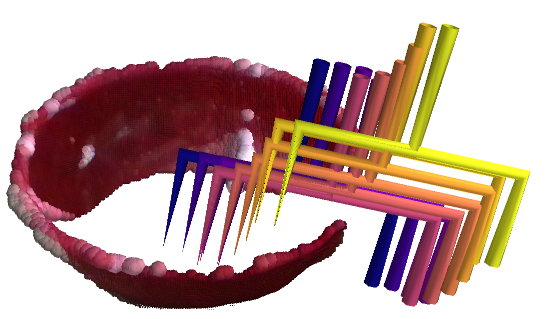
논문 그림 2 — 학습된 2차원 잠재 공간과 grasp 자세의 관계. 서로 다른 z를 샘플링하면 머그 테두리를 따라 다양한 grasp가 생성된다.
1.2. Grasp Pose Evaluator
Grasp sampler는 성공적인 grasp만으로 훈련되기 때문에, 분포 모드 사이의 실패한 grasp를 포함할 수 있습니다. Evaluator 네트워크는 각 grasp에 대해 성공 확률 P(S|g, X)를 할당하여 이러한 false positive를 식별하고 가지치기합니다.
- 입력: 객체 point cloud X와 grasp g.
- 그리퍼 표현: 로봇 그리퍼는 6D grasp pose g에 따라 렌더링된 point cloud \mathcal{X}_g로 근사됩니다. 객체 point cloud X와 그리퍼 point cloud \mathcal{X}_g는 포인트가 객체에 속하는지 그리퍼에 속하는지를 나타내는 추가 이진 특징을 사용하여 단일 point cloud X \cup \mathcal{X}_g로 결합됩니다. 이는 grasp pose와 객체 point cloud 사이의 모든 상대 정보를 사용하여 grasp를 분류하는 데 도움이 됩니다.
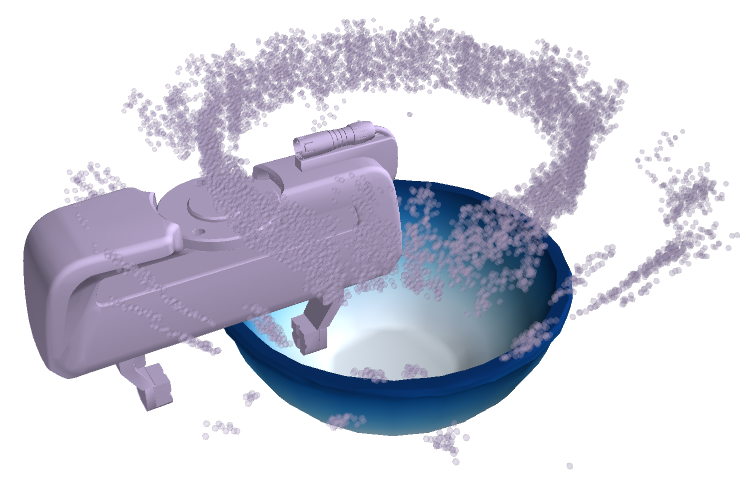
논문 그림 3 — 그리퍼를 그 자세로 렌더링한 point cloud \mathcal{X}_g를 객체 point cloud와 합쳐 evaluator의 입력으로 사용한다.
- 목표 함수: Cross-entropy loss를 사용하여 최적화됩니다. \mathcal{L}_{evaluator} = - (y \log(s) + (1 - y) \log(1 - s)) 여기서 y는 grasp의 성공 여부를 나타내는 ground truth 이진 레이블이고, s는 evaluator가 예측한 성공 확률입니다.
- 훈련 데이터: Robust한 evaluator를 훈련하기 위해 긍정적(positive) 및 부정적(negative) grasp 모두로 훈련됩니다. 특히,
hard negative grasps를 사용합니다. 이는 긍정적인 grasp와 유사한 자세를 가지지만, 객체와 충돌하거나 객체로부터 너무 멀리 떨어져 있는 grasp를 의미합니다. \mathcal{G}^- = \{g^- | \exists g \in \mathcal{G}^* : \mathcal{L}(g, g^-) < \epsilon\}
1.3. Iterative Grasp Pose Refinement
Evaluator 네트워크가 불가능한 grasp를 거부하지만, 거부된 많은 grasp는 성공적인 grasp에 근접할 수 있습니다. 이 점을 활용하여 실패한 grasp를 성공적인 grasp로 변환하는 변환 \Delta g \in SE(3)을 찾습니다.
- 방법: Evaluator 네트워크는 성공 확률 s의 미분 가능한 함수를 나타냅니다. 성공 확률을 최대화하는 정제 변환은 grasp 변환에 대한 성공의 미분 \partial S / \partial g을 통해 계산됩니다.
- 수식: \Delta g = \frac{\partial S}{\partial g} = \eta \times \frac{\partial S}{\partial T(g; p)} \times \frac{\partial T(g; p)}{\partial g} 여기서 \eta는 업데이트의 크기를 제한하는 하이퍼파라미터입니다.
- 강성 제약 (Rigidity Constraint): 그리퍼 point cloud \mathcal{X}_g는 Euler 각도 R_g = (\alpha_g, \beta_g, \gamma_g)로 정의된 grasp의 orientation과 translation T_g의 함수로 정의됩니다. Chain rule을 사용하여 \Delta g가 계산됩니다.
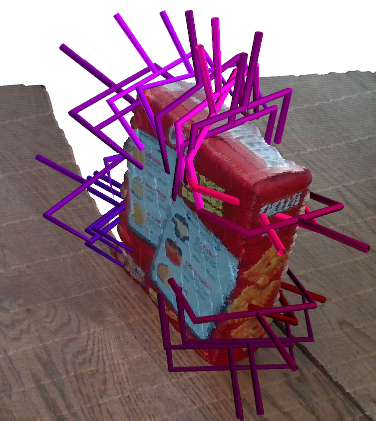
논문 그림 4 — VAE sampler가 객체 표면을 따라 생성한 다양한 grasp 집합. 다양성 덕분에 운동학적으로 실행 가능한 grasp를 찾기 쉽다.
2. 실험 (Experiments)
2.1. 훈련 데이터 생성
- 시뮬레이터: 물리 시뮬레이션 FleX [18]를 사용하여 성공적인 grasp의 기준 세트를 생성합니다.
- 객체: ShapeNet [3]의 상자, 원통 (무작위 생성), 그릇, 병, 머그컵 등 6가지 범주의 206개 객체를 사용합니다.
- Grasp 샘플링: 객체 메쉬 표면에 무작위 점을 샘플링하고, 그리퍼의 z-축을 표면 법선에 정렬하며, 그리퍼와 객체 표면 간의 거리를 그리퍼 손가락 길이 내에서 균일하게 샘플링합니다. 그리퍼가 객체와 충돌하지 않고 닫는 볼륨이 객체와 교차하는 grasp만 시뮬레이션합니다.
- 성공 정의: 그리퍼가 손가락을 닫은 후 미리 정의된 흔들림 동작을 수행할 때, 객체가 두 손가락 사이에 유지되면 성공으로 간주됩니다. 총 2,104,894개의 성공적인 grasp가 생성되었습니다 (19.4%).
2.2. 네트워크 아키텍처 세부 사항
- 기반: PointNet++ [24] 아키텍처.
- 레이어: 3개의 set-abstraction 레이어와 fully connected 레이어로 구성됩니다.
- Set-abstraction 레이어는 각각 128, 32, 모든 포인트를 샘플링합니다.
- 샘플링된 포인트의 2cm, 4cm, ∞ 반경 내의 포인트를 사용합니다.
- 각 set-abstraction 레이어는 3개의 fully connected 레이어를 사용하여 특징을 계산하며, 채널 수는 각각 [64, 64, 128], [128, 128, 256], [256, 256, 512]입니다.
- Fully Connected Layers: Set-abstraction 레이어 다음에는 1024개 유닛을 가진 두 개의 fully connected 레이어가 있습니다.
- Grasp Generator 출력: unit quaternion으로 표현된 회전 R과 translation T를 출력합니다.
- Evaluator 출력: softmax 레이어를 사용하여 각 grasp의 점수를 예측합니다.
2.3. 평가 지표 (Evaluation Metrics)
- Success Rate: 예측된 모든 grasp 중 성공적인 grasp의 비율.
- Coverage Rate: 생성된 grasp가 긍정적인 grasp 공간 \mathcal{G}^*를 얼마나 잘 포괄하는지 측정합니다. 예측된 grasp 세트 \hat{\mathcal{G}}가 긍정적인 grasp g \in \mathcal{G}^*를 2cm 이내로 커버하면 해당 grasp는 커버된 것으로 간주됩니다.
- AUC (Area Under the Curve): success-coverage 곡선의 AUC를 사용하여 방법론을 분석하고 평가합니다.
2.4. 분석 및 Ablation 연구
- 잠재 공간 차원: 잠재 공간 차원(1, 2, 3, 4)이 증가함에 따라 성공-커버리지 곡선의 AUC를 평가한 결과, 2차원 잠재 공간이 가장 좋은 성능을 보였습니다. 1차원은 용량 부족, 3차원 이상은 과적합 및 추론 시 커버리지 문제로 인해 성능이 저하되었습니다.
- 정제 단계의 효과: 정제 단계를 반복할수록 생성된 grasp의 성공률과 커버리지율이 모두 증가하는 것을 확인했습니다. 10번째 반복 이후 AUC가 수렴했습니다.
- 샘플링된 grasp의 효과: 샘플링된 grasp의 수가 많을수록 커버리지율이 증가합니다.
2.5. 로봇 실험 (Robot Experiments)
- 설정: Intel RealSense D415 카메라가 장착된 7-DOF Franka Panda 로봇 팔을 사용합니다.
- 객체: 시각적으로나 물리적으로 까다로운 17가지 일반적인 객체를 사용합니다. 객체의 3D 모델은 알 수 없습니다.
논문 그림 5 — 실로봇 실험에 사용한 17개의 미지 객체(42g~618g). 3D 모델 없이 부분 point cloud만으로 grasp를 생성한다.
- 프로토콜: 각 객체를 로봇 앞 테이블에 세 가지 다른 안정적인 자세로 놓습니다. 카메라 시야가 확보되도록 로봇 팔을 이동합니다. 측정된 point cloud에서 테이블 평면을 제거하고 나머지 포인트를 클러스터링하여 객체 point cloud를 추출합니다.
- 비교: 6-DOF GraspNet과 GPD [31]를 비교합니다.
- 성공 정의: 로봇이 객체를 떨어뜨리지 않고 10cm 들어 올릴 수 있으면 성공으로 간주합니다.
- 결과: 본 논문의 방법은 GPD [31]보다 모든 객체에서 더 높은 성공률을 달성했습니다 (평균 88% 대 47%). 본 방법은 다양한 grasp를 생성하여 운동학적으로 실행 가능한 grasp를 더 잘 찾을 수 있습니다. GPD는 머그컵의 림(rim)과 같은 얇은 구조물에 대한 grasp 생성이 어렵습니다.
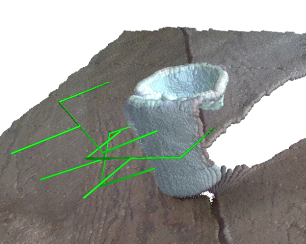
논문 그림 6 — 실제 depth 카메라로 관측한 부분 point cloud 위에 본 방법이 생성한 grasp 결과. 테두리·얇은 구조에서도 실행 가능한 grasp를 만든다.
3. 결론 (Conclusions)
본 논문은 알려지지 않은 객체에 대해 다양한 grasp를 생성하는 6-DOF GraspNet을 소개합니다. 이 방법은 VAE를 통해 다양한 grasp를 샘플링하고, Grasp Evaluator 네트워크를 통해 grasp 품질을 평가하며, 기울기 기반 정제 프로세스를 통해 grasp를 개선합니다. 학습은 전적으로 시뮬레이션에서 생성된 합성 데이터를 사용하며, 실제 환경에서 알 수 없는 3D 모델을 가진 객체에 대해서도 높은 성공률을 보였습니다. 이는 학습된 grasp sampler와 기울기 기반 정제 프로세스가 로봇 조작에 효과적임을 시사합니다.
향후 연구 방향: * 주변 환경의 객체를 고려하여 충돌하거나 실행 불가능한 grasp 생성을 직접 피하도록 sampler 또는 evaluator를 훈련합니다. * evaluator를 사용하여 샘플링된 grasp를 정제하는 것 외에, 객체에 접근하는 조작기를 위한 실시간 피드백 지침을 제공합니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
grasp 선택은 로봇 조작의 가장 중요한 문제 중 하나입니다. 로봇은 물체를 관찰하고, 그것을 집기 위해 그리퍼를 어디로(3D 위치) 어떤 방향(3D 회전)으로 움직일지 정해야 합니다. grasp의 안정성은 물체·그리퍼 기하, 질량 분포, 표면 마찰에 의존하며, 물체 주변 기하는 “어디를 잡으면 팔이 다른 물체와 충돌하지 않고 도달 가능한가”라는 추가 제약을 만듭니다.
전통적으로는 기하 휴리스틱으로 유망한 grasp 점을 고른 뒤 안정성·도달성을 분석했는데, 많은 방법이 완전한 3D 모델 을 전제해 — 잡음 섞인 깊이 영상으로 장면을 보는 현실에서는 심각한 한계입니다. 카메라를 움직여 전체 모델을 만들거나 shape completion을 할 수도 있지만, 좁은 공간에선 불가능하거나 정확도가 부족합니다.
최근 딥러닝으로 포인트클라우드에서 grasp 품질을 평가하는 연구가 나왔지만, 여전히 수작업 휴리스틱으로 평가 후보를 샘플링 하거나 CEM 같은 블랙박스 최적화에 기대고, 샘플된 grasp를 개선할 효율적 수단 이 없었습니다. 또 많은 방법이 grasp를 이미지 평면에 평행한 사각형(3-DOF)으로 표현해 다양성을 제약했습니다(top-down 위주).
이 논문의 한 줄 요약: 미지 물체에 대해 안정적이고 다양한 grasp 집합을 효율적으로 생성 하는 최초의 학습 프레임워크 — VAE로 grasp를 샘플하고, grasp evaluator로 평가하며, evaluator의 기울기로 grasp를 반복 개선한다.
주요 기여:
- VAE 기반 grasp sampler: 부분 포인트클라우드를 다양한 grasp 집합으로 매핑. 가능한 기능적 grasp를 높은 커버리지로 생성하면서 실패 grasp는 적게.
- grasp evaluator network: 6D 그리퍼 자세의 품질을 평가하고, 그 기울기로 grasp를 개선(충돌에서 빼내거나 정렬 보정).
- 미지 물체 17개를 88% 로 집어 기존(GPD) 대비 우수하며, 다양성을 유지하면서 높은 성공률을 보임.
방법
입력은 집을 물체의 포인트클라우드 입니다. 목표는 사후분포 P(G^* \mid X) 를 학습하는 것 — G^* 는 성공 grasp들의 공간, X 는 카메라가 본 부분 포인트클라우드입니다. grasp g=(R,T)\in SE(3) 는 물체 기준 프레임(원점 = 포인트클라우드 무게중심 \bar X)에서 정의됩니다. G^* 는 복잡·불연속할 수 있습니다(머그컵은 테두리·손잡이·바닥을 따라 여러 모드, 각 모드 내부는 연속). 모드 개수가 미리 알려지지 않으므로, 성공 grasp의 likelihood를 최대화하는 generator 모듈 을 학습합니다.
Variational Grasp Sampler
grasp sampler는 사전 정의된 성공 grasp 집합 g\in G^* 의 likelihood P(G\mid X) 를 최대화하는 생성 모델입니다. latent z, P(z)=\mathcal N(0,I) 에 대해
P(G\mid X) = \int P(G\mid X, z; \Theta)\, P(z)\, dz
이 적분은 다루기 어려우므로, encoder Q(z\mid X, g) 가 (포인트클라우드, grasp) 쌍을 latent의 작은 부분공간으로 매핑하고, decoder가 z\sim Q 에서 grasp \hat g 를 복원합니다. VAE 손실은
\mathcal L_{\text{vae}} = \sum_{z\sim Q,\, g\sim G^*} \mathcal L(\hat g, g) \;-\; \alpha\, \mathcal D_{KL}\big[Q(z\mid X, g)\,\Vert\,\mathcal N(0,I)\big]
회전·병진 손실을 합치기 위해 reconstruction 손실은 그리퍼 위의 사전 정의된 점 p 를 변환 해 비교합니다.
\mathcal L(g, \hat g) = \frac{1}{n}\sum \big\lVert \mathcal T(g; p) - \mathcal T(\hat g; p) \big\rVert_1
여기서 \mathcal T(\cdot;p) 는 grasp 자세에 따라 그리퍼 점들을 변환하는 함수입니다. encoder/decoder 모두 PointNet++ 기반이며, \alpha=0.01, latent는 2차원 을 씁니다(추론 시 encoder 제거, z\sim\mathcal N(0,I) 에서 샘플). 학습 결과 latent 공간이 grasp 자세와 강한 상관을 가짐을 정성적으로 확인했습니다.
Grasp Pose Evaluation
sampler는 양성 grasp만 보고 연속 사후분포를 학습하므로, 분포 모드 사이의 전이적 false positive 가 섞일 수 있습니다. 이를 걸러낼 evaluator P(S\mid g, X) 가 필요합니다. 핵심 표현 기법: grasp g 를 그리퍼 형상을 그 자세로 렌더링한 그리퍼 포인트클라우드 X_g 로 나타내고, 물체 점들과 X\cup X_g 로 합친 뒤 “물체/그리퍼 소속”을 나타내는 binary feature를 붙여 PointNet 으로 분류합니다. cross-entropy로 학습:
\mathcal L_{\text{evaluator}} = -\big(y\log(s) + (1-y)\log(1-s)\big)
y 는 grasp 성공 여부 라벨, s 는 예측 확률. 6D grasp 공간이 조합적으로 방대해 모든 음성을 샘플할 수 없으므로 hard negative mining 을 합니다. hard negative 집합은 양성 grasp를 살짝 교란해(그리퍼 메시가 물체와 충돌하거나 너무 멀어지도록) 만든
G^- = \{\, g^- \mid \exists\, g\in G^*:\ \mathcal L(g, g^-) < \epsilon \,\}
입니다.
Iterative Grasp Pose Refinement
evaluator가 부적절한 grasp를 걸러내지만, 거부된 grasp 상당수는 성공에 가깝습니다. 그래서 성공 확률을 높이는 변환 \Delta g\in SE(3) 를 찾습니다. evaluator는 미분 가능하므로 성공 S 를 grasp 변환으로 미분해 개선 방향을 얻습니다.
\Delta g = \eta \times \frac{\partial S}{\partial \mathcal T(g; p)} \times \frac{\partial \mathcal T(g; p)}{\partial g}
부분 미분 \partial S/\partial g 는 국소 근방에서만 유효하므로, \eta 로 step 크기를 제한합니다(최대 병진 갱신 1cm/step). 이 과정을 반복해 grasp를 점진적으로 개선합니다(예: 점이 그리퍼 사이에 없던 bowl grasp도 성공 자세로 밀어냄).
학습 데이터
물리 시뮬레이터 FleX 로 임의 형상의 grasp를 시뮬레이션합니다. ShapeNet의 6개 범주(상자·실린더·bowl·병·머그, 랜덤 생성 박스/실린더 포함) 206개 물체. 물체 표면에 점을 샘플하고 그리퍼 z축을 표면 법선에 정렬, 무중력 free-floating 그리퍼·물체로 시뮬레이션, 손가락을 닫고 흔들기(shaking) 동작 후에도 물체가 잡혀 있으면 성공으로 라벨. 총 10,816,720 후보 중 7,074,038개(65.4%, non-empty closing volume 통과)를 시뮬레이션해 2,104,894개(19.4%) 성공 grasp 생성. PointNet++, Adam, lr 0.0001. 모든 grasp는 시뮬레이션 생성이며 실데이터는 학습에 미사용.
실험
평가 지표는 success rate(예측 grasp 중 성공 비율)와 coverage rate(생성 grasp가 양성 grasp 공간 G^* 를 얼마나 덮는가; 2cm 이내면 커버로 간주) — 분류의 precision/recall에 대응합니다. success-coverage 곡선의 AUC 로 분석합니다.
Ablation
- latent 차원: 2D가 최선. 1D는 용량 부족, 3D·4D는 학습 손실은 약간 좋지만 추론 시 VAE가 latent를 조밀히 덮지 못해 성능 저하.
- refinement step 수: success·coverage가 함께 증가하며 10회 이후 plateau(개선 grasp가 양성 G^* 에 가까워지므로 coverage도 상승).
- VAE sampler vs 기하 sampler: 같은 evaluator를 붙여도 VAE+Evaluator AUC 0.18 vs 기하 Baseline+Evaluator 0.07. 기하 법선 기반 샘플러는 테두리·얇은 구조에서 grasp를 거의 못 만들고 결손/가림에 일반화 못 함.
로봇 실험
7-DOF Franka Panda + Intel RealSense D415(그리퍼 장착). 시각·물리적으로 까다로운 미지 물체(질량 42g~618g)를 3가지 안정 자세로 배치, 10cm 들어 올리면 성공. 충돌 없는 경로가 있는 최고 점수 grasp를 실행, 실행 가능 grasp가 없으면 실패. 방법당 51 trial. 추론은 VAE+Evaluator 0.04초, refinement 1회 0.3초(Titan XP, batch 200).
Table 1 — vs GPD(베이스라인 6-DOF grasp planner):
| 범주 | 6-DOF GraspNet | GPD |
|---|---|---|
| Box | 83% | 50% |
| Cylinder | 89% | 78% |
| Bowl | 100% | 78% |
| Mug | 86% | 6% |
| 평균 성공률 | 90% | 52% |
| 전체 성공률 | 88% | 47% |
해석: GraspNet은 다양한 grasp를 생성 해 운동학적으로 실행 가능한 것을 찾기 쉬운 반면, GPD는 종종 실행 가능한 grasp를 못 만듭니다. 특히 머그컵에서 GraspNet은 테두리를 따라 훨씬 많은 grasp 를 생성(GPD는 테두리 grasp 자체를 못 만들어 6%). 손가락이 표면에 접하는 grasp는 실행 오차에 취약한데, 다양한 후보가 이를 보완합니다.
비판적 고찰
강점
- 생성-평가-개선의 3단 파이프라인. “VAE로 다양성 확보 → evaluator로 정밀도 보강 → 기울기로 반복 개선”이라는 구성이 명료합니다. 특히 학습된 grasp sampler와 기울기 기반 refinement는 당시 최초 의 시도로, false positive를 능동적으로 성공 자세로 밀어냅니다.
- 다양성이 곧 실행 가능성. 단일 best grasp가 아닌 다양한 집합을 생성해, 운동학·충돌 제약을 통과하는 grasp를 찾을 확률을 높입니다. 머그 테두리 사례가 이를 극적으로 보여줍니다(86% vs 6%).
- sim-to-real 전이. 순수 시뮬레이션 학습만으로 추가 단계 없이 실로봇에서 88%를 달성해, 데이터 수집 비용 없이 미지 물체로 확장됩니다.
- 그리퍼를 포인트클라우드로 표현. grasp를 X_g 로 렌더링해 물체 점과 합치는 evaluator 표현이, 단순히 6D 자세를 첫 층 feature로 넣는 방식보다 정확함을 실험으로 보였습니다.
약점과 한계
- 단일 물체·주변 미고려(저자 인정). 모든 latent를 균일 샘플 후 충돌·운동학 검사로 사후 제거 하며, 주변 물체와의 충돌을 sampler/evaluator가 직접 고려하지 않습니다. 어수선한 장면에서는 한계가 있습니다(저자는 주변 물체를 고려하는 학습을 후속 방향으로 제시).
- refinement의 국소성. \partial S/\partial g 는 국소 근방 근사라 1cm/step으로 제한됩니다. 큰 교정이 필요한 grasp는 여러 step이 들고, 잘못된 국소 최적에 갇힐 여지가 있습니다(추측).
- 물체 범주의 제한. 학습 물체가 6개 범주(상자·실린더·bowl·병·머그)에 집중돼, 형상이 크게 다른 물체로의 일반화는 추가 검증이 필요합니다.
- 추론 비용. refinement 1회 0.3초로, 반복 횟수가 늘면 실시간 폐루프 제어엔 부담일 수 있습니다(저자는 evaluator를 실시간 가이드로 쓰는 방향을 언급).
요약 및 결론
6-DOF GraspNet은 미지 물체에 대한 6-DOF grasp 생성을 VAE sampler + grasp evaluator + 기울기 기반 iterative refinement 의 3단 파이프라인으로 푼 NVIDIA의 연구입니다. VAE가 복잡·불연속한 성공 grasp 분포(머그의 테두리·손잡이·바닥 등 다중 모드)를 다양하게 샘플하고, evaluator가 전이적 false positive를 걸러내며, evaluator의 기울기로 grasp를 성공 자세로 밀어 정밀도를 보강합니다.
수치로 정리하면, 순수 시뮬레이션 학습만으로 7-DOF Franka에서 미지 물체 17개를 88%(범주 평균 90%) 로 집어 GPD(47%)를 크게 앞섰고, 특히 머그 86% vs GPD 6% 로 다양한 grasp 생성의 가치를 입증했습니다. ablation에서는 2D latent와 ~10회 refinement, VAE 샘플러의 우위(AUC 0.18 vs 0.07)를 확인했습니다.
실무 관점에서 이 연구의 가치는 “완전한 3D 모델 없이 부분 포인트클라우드만으로, 다양하고 실행 가능한 6-DOF grasp를 학습 기반으로 생성·개선할 수 있음을 보인 것” 에 있습니다. 단일 물체·주변 미고려라는 한계는 분명하지만, 생성+평가+기울기 개선 이라는 틀은 이후 다수의 grasp 연구(예: 본 포스트가 함께 참조하는 VCGS 등)의 토대가 된 기념비적 작업입니다.