📃Lightning Grasp 리뷰
🔍 Ping. 🔔 Ring. ⛏️ Dig. A tiered review series: quick look, key ideas, deep dive.
- 💡 Lightning Grasp는 dexterous hand를 위한 고성능 절차적 grasp synthesis 알고리즘으로, 기존 방식 대비 압도적인 속도와 다양성을 제공합니다.
- 🛠️ 이 핵심 아이디어는 “Contact Field”라는 효율적인 데이터 구조를 통해 복잡한 기하학적 계산을 탐색 과정에서 분리하여 문제의 복잡성을 크게 줄인 것입니다.
- 🚀 이 접근 방식은 수동적인 튜닝 없이도 불규칙한 객체에 대한 unsupervised grasp 생성을 가능하게 하며, 다양한 핸드 모델과 객체에 대한 강력한 성능을 보여줍니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
Lightning Grasp는 dexterous hand를 위한 고성능 절차적(procedural) grasp synthesis 알고리즘으로, 기존 접근 방식 대비 수백 배 빠른 속도를 달성하며 비정형적인 도구형 객체에 대한 비지도 학습 grasp 생성을 가능하게 합니다. 이 방법은 복잡한 기하학적 계산을 Contact Field라는 효율적인 데이터 구조를 통해 탐색 프로세스로부터 분리함으로써 기존 방법의 한계(예: 에너지 함수의 세심한 튜닝, 민감한 초기화)를 극복합니다.
핵심 방법론 (Core Methodology)
Lightning Grasp는 크게 세 단계로 이루어집니다:
- 접촉 도메인 식별 (Contact Domain Detection): 각 손가락이 객체 표면에서 도달할 수 있는 영역인
Contact Domain을 정의합니다. - 접촉점 최적화 (Contact Point Optimization): 안정적인 grasp를 위해 이 도메인 내에서 최적의 접촉점 세트를 탐색합니다.
- Kinematics 최적화 (Kinematics Optimization): 계산된 접촉점에 손가락을 배치하여 grasp를 구현합니다.
1. Preliminaries
- Grasp 정의: grasp는 객체의 손 프레임 내에서의 자세(P)와 손의 관절 구성(q \in C)의 튜플 (P, q)로 정의됩니다.
- 유효성 기준:
- No Penetrations (침투 없음): 손 메쉬 HM(q)와 변환된 객체 메쉬 T(O; P) 사이에 침투가 없어야 합니다. 형식적으로는 HM(q) \cap T(O; P) \subset \partial HM(q) \cup \partial T(O; P)를 만족해야 합니다.
- Grasp Stability (Grasp 안정성): FSWO (Frictionless Self-balancing Wrench Optimization) 또는 GSWO (General Self-balancing Wrench Optimization)와 같은 안정성 조건을 만족해야 합니다. 이들은 접촉점 p_i와 법선 n_i에 기반하여 힘(\alpha_i n_i) 및 모멘텀(\alpha_i (p_i \times n_i))의 균형을 최적화하는 문제입니다.
- FSWO (식 1): \min_{\alpha} \left\| \sum_{i=1}^n \alpha_i n_i \right\|^2 + \lambda \left\| \sum_{i=1}^n \alpha_i (p_i \times n_i) \right\|^2 subject to \exists j, \alpha_j = 1, \alpha_i \ge 0, \forall i = 1, \dots, n
- GSWO (식 2 - 마찰 포함): \min_{\alpha, \beta(x), \beta(y)} \left\| \sum_{i=1}^n (\alpha_i n_i + \beta(x)_i x_i + \beta(y)_i y_i) \right\|^2 + \lambda \left\| \sum_{i=1}^n p_i \times (\alpha_i n_i + \beta(x)_i x_i + \beta(y)_i y_i) \right\|^2 subject to \exists j, \alpha_j = 1, \alpha_i \ge 0, \forall i = 1, \dots, n (\beta(x)_i)^2 + (\beta(y)_i)^2 \le \mu^2 \alpha_i^2 여기서 x_i, y_i는 접촉점에서의 접선 평면의 정규 직교 기저를 나타냅니다.
2. Contact Field
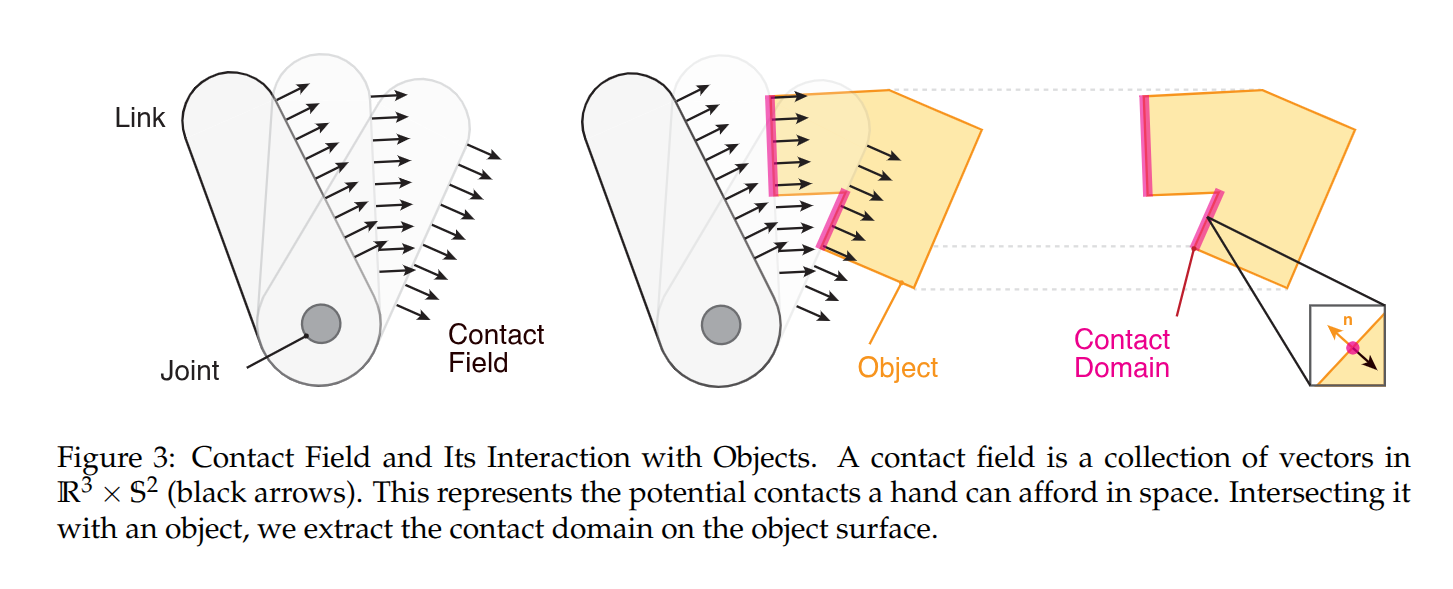
Contact Field는 손이 잠재적으로 생성할 수 있는 공간적 접촉을 특성화하는 핵심 데이터 구조입니다.
- Point-based Contact Field (정의 4.1): 특정 손 링크 메쉬 M_i의 점 p \in \partial M_i와 법선 n \in \text{normal}(p, M_i)에 대해, 주어진 프레임 B에서의 Contact Field는 CF_B(i, p, n) = \{FK((p, n); i, q)|q \in C\} \subset \mathbb{R}^3 \times S^2로 정의됩니다. 이는 특정 관절 구성 q에서 변환된 p와 n의 집합입니다.
- Hand Contact Field (정의 4.2): 전체 손 H의 Contact Field는 CF(H) = \bigcup_{(i,p) \in \partial \hat{HM}, n \in \text{normal}(p, M_i)} CF(i, p, n) \subset \mathbb{R}^3 \times S^2로, 모든 손 링크 메쉬의 경계에서 정의된 Point-based Contact Field들의 합집합입니다.
- Contact Surface Representation (정의 4.3): 객체 메쉬 M의 Contact Surface Representation은 S(M) = \{(p, -n)|p \in \partial M, n \in \text{normal}(p, M)\} \subset \mathbb{R}^3 \times S^2로 정의됩니다.
- Contact Interaction: 손과 객체 간의 잠재적 접촉 상호작용은 CF(H) \cap S(O)로 표현됩니다.
구현 (Implementation):
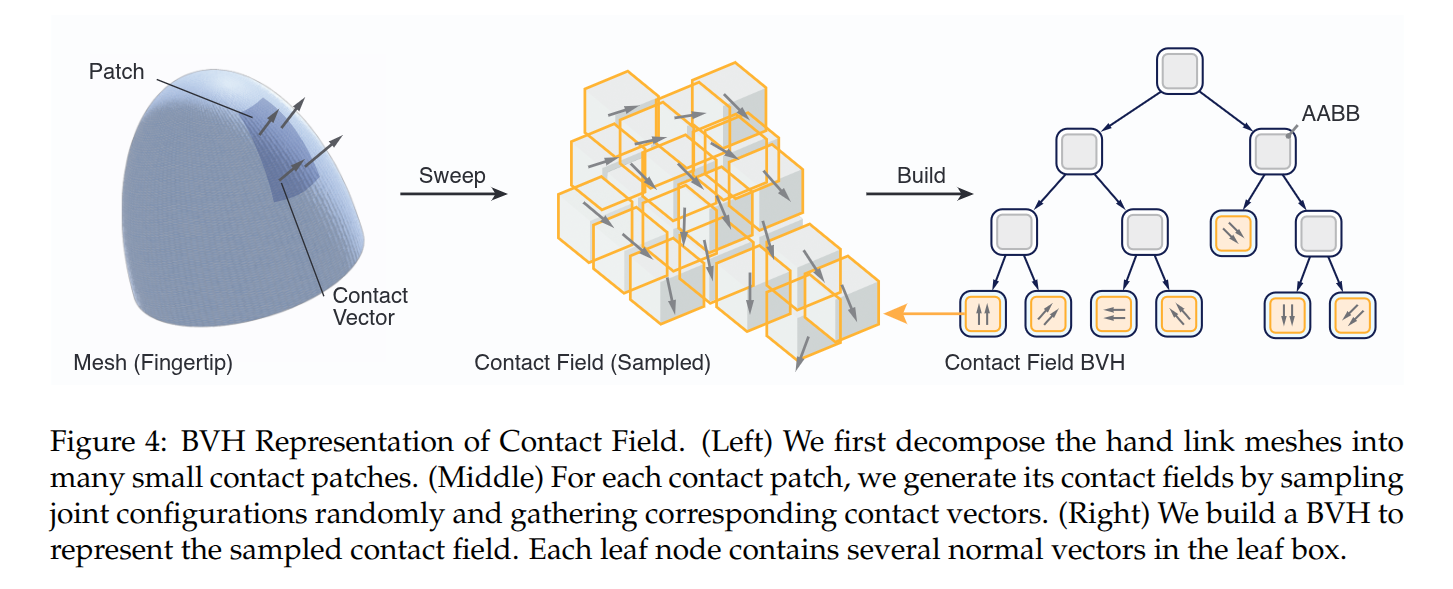
- Contact Field BVH (Bounding Volume Hierarchy): 샘플링된
Contact Field는 BVH로 구성됩니다. 공간을 작은 박스로 분할하고 각 박스에 법선 벡터를 저장하여 BVH 트리를 구축합니다. - Object Contact Query: 객체 표면에서 무작위로 (p, -n)를 샘플링하고 BVH를 쿼리하여 접촉 가능한 영역을 찾습니다. BVH의 리프 노드에 도달하면, 객체의 법선 n과 리프 노드 내의 손 법선 x 간의 정렬(-x^T n \ge \theta_{hit})을 확인합니다.
- Fine-grained Contact Field: 전체 손 표면을 여러 개의 패치로 나누어 각 패치에 대한
Contact Field를 개별적으로 계산합니다. 이는 Kinematics 최적화 시 어떤 손가락이 특정 접촉에 기여하는지 식별하는 데 중요합니다.
3. Lightning Grasp Pipeline
Object Preprocessing: 객체의 오목한 영역(예: 도달할 수 없는 구멍)을 접촉점 후보에서 제거하여 침투 위험을 줄입니다.
Object Placement (객체 배치):
- Exhaustive Placement:
Contact Field에서 한 점을 무작위로 선택하고 객체 표면의 무작위 샘플링된 점과 정렬합니다. 희귀한 grasp를 생성할 수 있지만, 처리량은 낮을 수 있습니다. - Canonical Placement: 손바닥 위의 박스 영역과 같은 표준 객체 배치 영역을 지정합니다. 이는 처리량은 높지만 생성 가능한 grasp의 다양성을 제한합니다.
- 정적 링크(예: 손바닥)와의 접촉을 설정하기 위해, 객체를 초기에는 정적 링크 표면에 무작위로 배치한 후 침투가 없는 배치를 다음 단계로 진행합니다.
- Exhaustive Placement:
Contact Domain Generation: 객체가 고정되면, 각 접촉 패치에 해당하는
Contact Domain을 추출합니다. k개의 객체 접촉을 만들기 위해 k개의 접촉 도메인을 수집하며, 이들은 서로 다른 손가락에서 유래해야 합니다 (독립성). 독립성은 Kinematic Tree의 연결된 구성요소를 기반으로 정의됩니다.Contact Point Optimization: FSWO와 같은 grasp 품질 목표를 최대화하기 위해 각
Contact Domain에서 하나의 접촉점을 탐색합니다. 이는Blockwise Zeroth-Order Optimization을 통해 수행됩니다. 각 접촉점 (p_i, n_i)를 개별적으로 랜덤 로컬 탐색을 통해 최적화하며, J 계산을 위한 하위 레벨 최적화의 초기 구성은 이전 단계에서 얻은 Contact Force Solution을 재사용하여 효율성을 높입니다.- 알고리즘 2: Blockwise, Zeroth-Order Contact Point Optimization
- 각 D_i에서 (p_i, n_i)를 무작위로 초기화합니다.
- 외부 반복 (n_o번):
- 내부 반복 (k번, 각 접촉점마다):
- 변이 방향을 생성 (접선 평면 기반).
- [pi]′를 변이된 위치로 업데이트합니다.
- [p′i, n′i]를 D_i에 투영합니다.
- 현재 접촉점 (p_i, n_i)를 주변에서 J를 최소화하는 점으로 업데이트합니다.
- 알고리즘 2: Blockwise, Zeroth-Order Contact Point Optimization
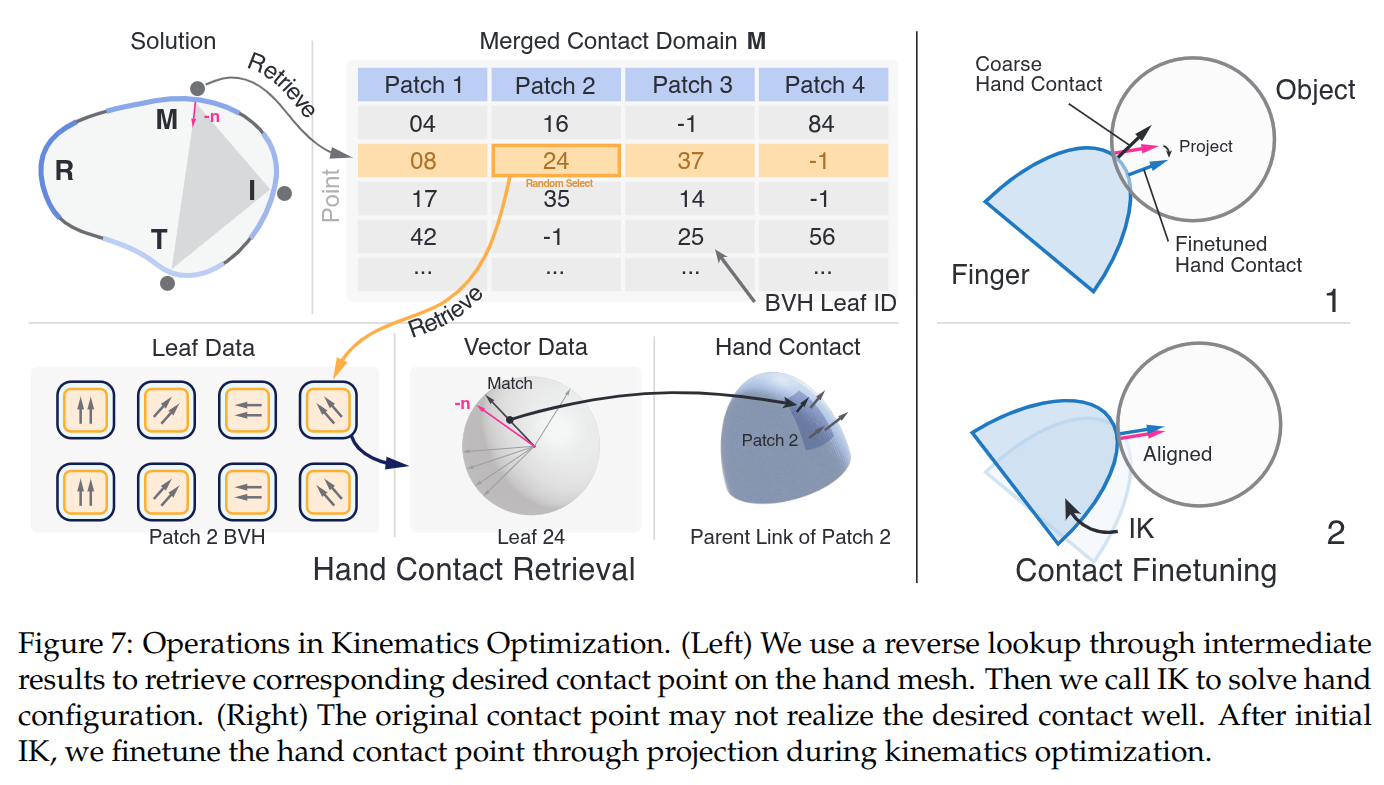
Kinematics Optimization: 결정된 객체 접촉점을 실현하기 위해 손가락 표면의 해당 접촉점을 역으로 찾습니다.
- Phase I (Coarse): 객체 접촉점 (p_i, n_i)에 해당하는 손의 접촉점 (\tilde{p}_i, \tilde{n}_i)를 검색합니다.
- 목표는 \tilde{p}_i를 p_i에, 그리고 \tilde{p}_i + \beta \tilde{n}_i를 p_i + \beta n_i에 일치시키는 것입니다. 이는
Damped Least Square (DLS)문제 (식 7)로 해결됩니다. \min_{\Delta q} \left\| \begin{bmatrix} J_p(\tilde{p}_i; q) \\ J_p(\tilde{p}_i + \beta \tilde{n}_i; q) \end{bmatrix} \Delta q - \begin{bmatrix} p_i - \tilde{p}_i \\ p_i + \beta n_i - (\tilde{p}_i + \beta \tilde{n}_i) \end{bmatrix} \right\|^2 + \lambda \|\Delta q\|^2 여기서 J_p는 위치 Jacobian입니다. - Phase II (Finetuning): 초기 IK 이후, 각 p_i를 최신 목표 링크에 투영하여 개선된 접촉점 \tilde{p}_i를 얻고 DLS 업데이트를 반복하여 q를 미세 조정합니다.
Postprocessing:
- 아직 고정되지 않은 관절 값(예: grasp에 사용되지 않은 손가락)을 결정합니다 (현재 버전에서는 무작위 값 할당).
- 손-손 또는 손-객체 충돌이 있거나 grasp 안정성 기준을 만족하지 않는 grasp를 필터링합니다. 충돌 감지는 AABB 기반 broad phase와 GJK (GJK (Gilbert–Johnson–Keerthi distance algorithm)) 기반 narrow phase를 포함합니다.
- 미사용 손가락을 사용하여 추가 접촉을 탐색함으로써 안정성이 부족한 grasp를 개선할 수 있습니다.
결과 및 성능:
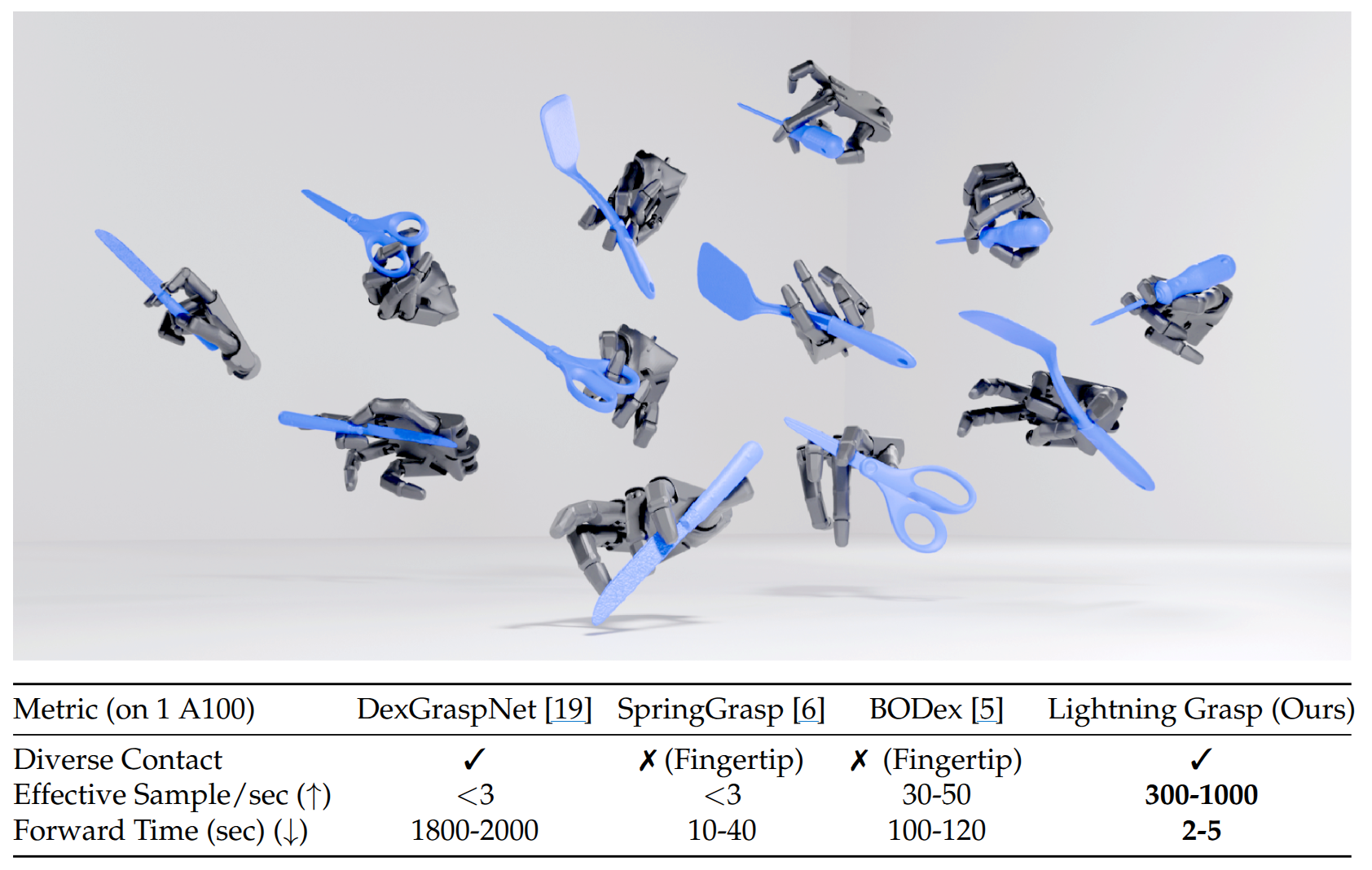
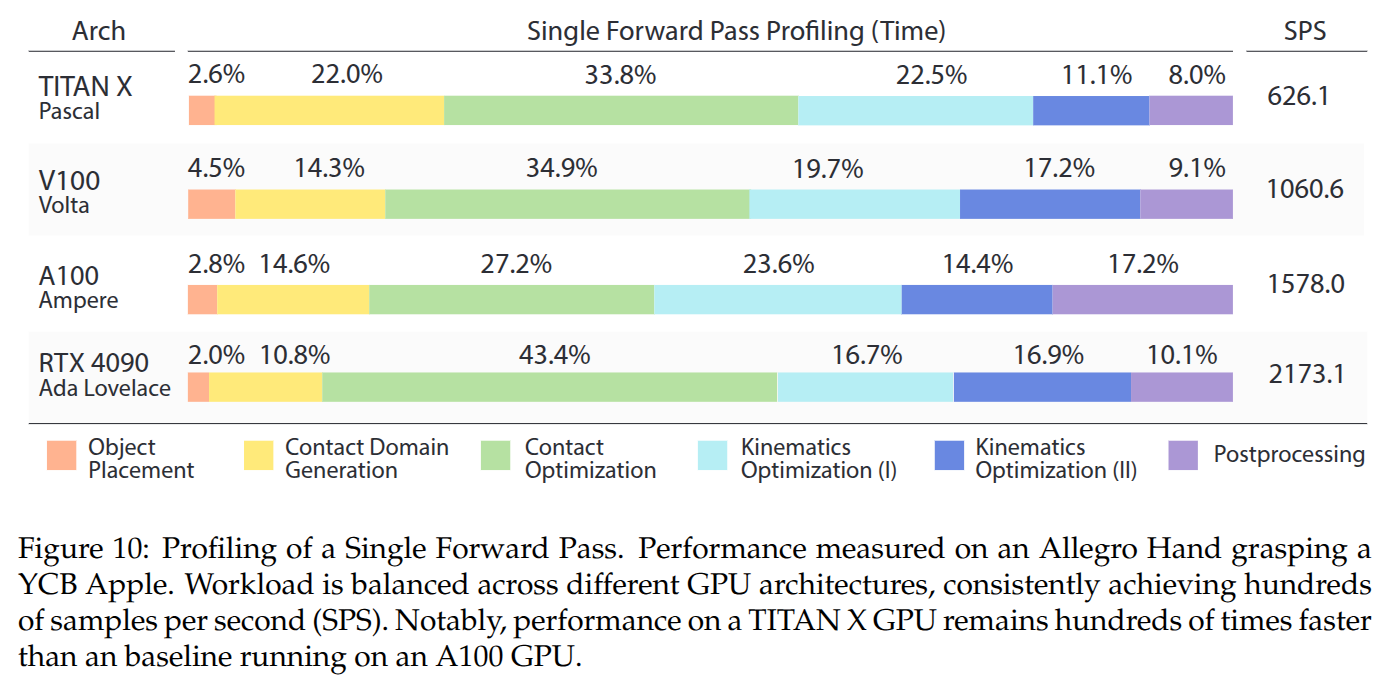
Lightning Grasp는 Shadow Hand (22DOF), LEAP Hand (16DOF), Allegro Hand (16DOF), DClaw Gripper (9DOF) 등 다양한 손 모델과 YCB 객체 및 기타 비정형 객체에 대해 테스트되었습니다. A100 GPU에서 단일 forward pass로 2-5초 내에 1,000-10,000개의 유효한 grasp를 생성하며, 기존 방법 대비 월등한 속도를 보여줍니다. TITAN X와 같은 구형 GPU에서도 실시간 성능을 달성합니다. Contact Optimization과 Kinematics Optimization이 전체 계산 시간의 약 33%를 차지하는 등 워크로드가 균형 있게 분배되어 있습니다. 특히 Allegro Hand에서 가장 많은 유효 샘플이 생성되었으며, LEAP Hand, Shadow Hand, DClaw Gripper는 충돌로 인한 필터링이 많았습니다.
향후 연구 방향:
- 객체의 비-볼록성으로 인한 충돌(예: 컵 안쪽)을 조기에 걸러내기 위한
Contact Field데이터 구조 개선 (예: 손가락 형상 정보를Contact Field박스에 포함). - 이전 탐색 결과를 재사용하는
Multi-pass generation을 통해 오프라인 데이터셋 생성 효율화. - 데이터 기반 탐색:
Lightning Grasp의 자가 플레이 데이터를 활용하여 유망한 객체 자세를 예측하는 객체 자세 정책(object pose policy)을 훈련하여 비효율적인 탐색을 줄이는 것. - 사용자 의도에 따라 특정 유형의 grasp를 유도하는 대화형 설계.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
1. 서론: 왜 이 연구가 중요한가?
로봇 공학에서 다지 손(dexterous hand)을 이용한 파지(grasping)는 인간 수준의 조작 능력을 달성하기 위한 핵심 기술입니다. GraspIt!이 발표된 지 20년이 지났고, 생성형 AI가 폭발적으로 성장한 지 3년이 지났지만, 실시간으로 다양한 파지 자세를 합성하는 빠르고 효과적인 절차적(analytical) 알고리즘은 여전히 미해결 과제로 남아 있었습니다.
1.1 기존 연구의 한계
기존의 파지 합성 방법들은 크게 두 가지 범주로 나눌 수 있습니다:
절차적(Analytical) 방법
- GraspIt!, DexGraspNet, SpringGrasp, BODex 등
- 물리 기반 에너지 함수 최적화
- 장점: 임의의 객체에 적용 가능
- 단점: 느린 속도, 수동 튜닝 필요, 초기화에 민감
학습 기반(Learning-based) 방법
- CVAE, Diffusion 모델 기반 접근법
- 장점: 빠른 추론 속도
- 단점: 대규모 데이터셋 필요, 일반화 한계
최근 DexGraspNet, SpringGrasp, BODex 등의 연구들이 이 문제를 해결하려 시도했지만, 실시간 다양성 파지 합성은 여전히 어려운 문제였습니다. 특히 기존 방법들은 다음과 같은 근본적인 한계를 가지고 있었습니다:
- 기하 연산과 탐색의 얽힘: 최적화 과정에서 지속적인 기하 연산이 필요하여 성능 병목 발생
- 에너지 함수 튜닝의 어려움: 끌어당김(attract)과 밀어냄(repel) 에너지의 균형 조정 필요
- 초기화 민감성: 손 자세의 초기 템플릿에 따라 결과가 크게 달라짐
- 복잡한 객체에 대한 제한: 도구형 불규칙 객체에서 낮은 성공률
1.2 Lightning Grasp의 등장
Lightning Grasp는 이러한 문제들을 근본적으로 해결하기 위해 설계된 새로운 접근법입니다. 핵심 통찰은 놀랍도록 단순합니다:
“기하 연산과 탐색/최적화를 분리하라”
이 간단하지만 강력한 아이디어를 구현하기 위해, 저자들은 Contact Field라는 새로운 데이터 구조를 도입했습니다.
2. 핵심 기여: Contact Field 데이터 구조
2.1 Contact Field란?
Contact Field는 객체 표면에서 각 손가락이 도달할 수 있는 모든 접촉 가능 영역을 효율적으로 감지하고 표현하는 데이터 구조입니다. 기존 방법들이 최적화 루프 내에서 반복적으로 기하 연산을 수행하는 것과 달리, Contact Field는 기하 정보를 사전에 계산하여 캐싱함으로써 탐색 과정에서 복잡한 기하 연산을 완전히 제거합니다.
2.2 설계 철학
Contact Field의 설계는 다음 세 가지 핵심 원리를 따릅니다:
원리 1: 관심사의 분리 (Separation of Concerns)
전통적 접근법: [기하 연산 ↔ 최적화] (밀접한 결합)
Lightning Grasp: [기하 연산] → [Contact Field] → [최적화] (느슨한 결합)원리 2: 사전 계산의 활용
- 객체 표면의 접촉 가능 영역을 미리 분석
- 각 손가락의 도달 가능성을 Contact Field에 저장
- 최적화 시에는 이미 계산된 정보만 참조
원리 3: GPU 친화적 구조
- LBVH(Linear Bounding Volume Hierarchy) 기반 구현
- 대규모 병렬 처리 가능한 설계
- 메모리 효율적인 데이터 레이아웃
2.3 Contact Field의 구성 요소
Contact Field는 다음과 같은 정보를 인코딩합니다:
- Contact Domains: 각 손가락이 도달할 수 있는 객체 표면 영역
- Contact Patches: 허용된 법선 방향을 기반으로 정의된 접촉 패치
- Feasibility Maps: 특정 손가락-표면 조합의 물리적 실현 가능성
3. 알고리즘 파이프라인 심층 분석
Lightning Grasp의 파이프라인은 크게 세 단계로 구성됩니다:
3.1 Phase I: Contact Domain 식별
입력: 객체 메쉬, 손 URDF
출력: 각 손가락에 대한 Contact Domains
알고리즘:
1. 객체 표면 포인트 샘플링
2. 각 포인트에 대해 도달 가능한 손가락 식별
3. 허용된 법선 방향 기반 필터링
4. Contact Domains 구성이 단계에서 핵심은 각 손가락이 도달할 수 있는 객체 표면 영역을 사전에 파악하는 것입니다. 기존 방법들은 이 정보를 최적화 과정에서 반복적으로 계산했지만, Lightning Grasp는 이를 한 번만 계산하고 재사용합니다.
3.2 Phase II: Contact 최적화
Contact Field가 구축되면, 최적화 과정은 순수하게 Contact Field 내에서의 탐색 문제가 됩니다:
기존 접근법의 최적화:
# 의사 코드 - 기존 방법
for iteration in range(max_iters):
# 매 반복마다 기하 연산 수행 (느림)
distances = compute_mesh_distances(hand, object)
normals = compute_contact_normals(hand, object)
penetration = compute_penetration_depth(hand, object)
# 에너지 계산
E_attract = attraction_energy(distances)
E_repel = repulsion_energy(penetration)
E_total = w1 * E_attract + w2 * E_repel # 민감한 가중치 튜닝 필요
# 그래디언트 계산 및 업데이트
grad = compute_gradient(E_total)
hand_pose = hand_pose - lr * gradLightning Grasp의 최적화:
# 의사 코드 - Lightning Grasp
# Phase I에서 Contact Field 사전 구축
contact_field = build_contact_field(object)
for iteration in range(max_iters):
# Contact Field 조회 (빠름 - O(1) 수준)
valid_contacts = contact_field.query(finger_positions)
# 접촉 최적화 - 기하 연산 없음
contact_config = optimize_contacts(valid_contacts)
# 운동학 풀이
joint_angles = inverse_kinematics(contact_config)3.3 Phase III: 운동학 최적화 및 마무리
마지막 단계에서는 다음 작업이 수행됩니다:
- 역운동학(IK) 풀이: 선택된 접촉 위치에 손가락 끝이 도달하도록 관절 각도 계산
- 미사용 손가락 처리: 파지에 사용되지 않는 손가락의 자세 결정
- 충돌 검사: 손-손, 손-객체 충돌 필터링
- 안정성 검증: 파지 안정성 기준 충족 여부 확인
충돌 검사는 Two-Phase 알고리즘으로 구현됩니다:
- Broad Phase: AABB(Axis-Aligned Bounding Box) 기반 빠른 필터링
- Narrow Phase: 정확한 기하학적 충돌 검사
4. 기술적 혁신 상세 분석
4.1 파지 합성 문제의 재정의
Lightning Grasp는 파지 합성 문제를 새로운 관점에서 바라봅니다. 전통적으로 이 문제는 다음과 같이 정의되었습니다:
기존 정의: 연속 최적화 문제
\min_{\theta} E_{attract}(\theta) + \lambda E_{repel}(\theta) + \mu E_{stability}(\theta)
여기서 \theta는 손 자세 파라미터이고, 세 가지 에너지 항의 균형을 맞추는 것이 핵심 과제였습니다.
Lightning Grasp의 재정의: 이산 탐색 + 연속 정제
Lightning Grasp는 이를 두 단계로 분리합니다:
- 이산 탐색: Contact Field 내에서 유효한 접촉 조합 탐색
- 연속 정제: 선택된 접촉에 대한 운동학적 실현
이 분리는 각 단계를 독립적으로 최적화할 수 있게 하며, 에너지 함수 가중치 튜닝의 필요성을 제거합니다.
4.2 Force Closure 분석의 효율화
안정적인 파지를 위해서는 Force Closure 조건을 만족해야 합니다. 기존 방법들은 이를 미분 가능한 근사로 모델링했지만, Lightning Grasp는 다른 접근을 취합니다.
저자들은 General Self-balancing Wrench Optimization (GSWO) 문제와 Frictionless Self-balancing Wrench Optimization (FSWO) 문제를 구분합니다:
- FSWO는 마찰을 무시하는 더 엄격한(보수적인) 안정성 기준
- 마찰 계수 μ가 안정성의 강도를 결정
- Contact Field 내에서 이미 유효한 접촉 조합만 고려하므로 안정성 검증이 단순화
4.3 GPU 최적화 전략
Lightning Grasp의 뛰어난 성능은 정교한 GPU 최적화에 기인합니다:
메모리 계층 활용 - 자주 접근되는 Contact Field 데이터를 공유 메모리에 배치 - 연산 결과의 레지스터 캐싱 - 메모리 접근 패턴 최적화로 캐시 적중률 향상
병렬화 전략 - 배치 처리: 수천 개의 파지 후보를 동시에 평가 - 파이프라이닝: Contact Field 구축과 최적화의 중첩 실행 - 동적 워크로드 밸런싱
프로파일링 결과에 따르면, Contact 최적화와 운동학 최적화가 각각 약 33%의 계산 시간을 차지하여 균형 잡힌 워크로드 분배를 보여줍니다.
5. 성능 분석 및 비교
5.1 정량적 성능
| GPU 아키텍처 | 초당 유효 샘플 수 (SPS) | 포워드 패스 시간 |
|---|---|---|
| NVIDIA A100 | 1,000-10,000 | 2-5초 |
| NVIDIA TITAN X (Pascal) | 실시간 수준 | A100 기반 baseline 대비 수백 배 빠름 |
| RTX Ampere | 고성능 | A100 대비 효율적 |
| RTX Ada Lovelace | 최고 성능 | 최신 아키텍처 최적화 |
핵심 지표:
- 기존 최첨단 방법 대비 수 자릿수(orders of magnitude) 속도 향상
- TITAN X(레거시 GPU)에서도 A100 기반 baseline보다 수백 배 빠름(논문 본문 명시)
- 객체 복잡도에 따라 2-5초 내 1,000-10,000개의 다양한 유효 파지 생성
5.2 기존 방법들과의 비교
DexGraspNet (2022)
- 미분 가능한 force closure 추정기 기반
- ShadowHand에서 1.32M 파지 생성
- 대규모 CPU 클러스터 필요
- Lightning Grasp는 동일한 결과를 단일 GPU에서 훨씬 빠르게 달성
SpringGrasp (2024)
- 가상 스프링 모델 기반 컴플라이언트 파지
- 불확실성 고려한 로버스트 파지 합성
- 실시간 성능 달성하지 못함
- Lightning Grasp는 실시간 다양성 파지 달성
- Bilevel Optimization 기반
- QP 기반 에너지 함수로 물리적 정확성 향상
- 50x 속도 향상 주장
- Lightning Grasp는 이보다 더 큰 속도 향상 달성
- 미분 가능 시뮬레이션 기반
- Contact-rich 파지 합성
- 40분에 5개 파지 생성 (MANO 모델)
- Lightning Grasp는 초당 수천 개 파지 생성
5.3 지원 로봇 손 플랫폼
Lightning Grasp는 다양한 로봇 손 플랫폼을 지원합니다:
| 로봇 손 | 자유도(DOF) | 손가락 수 | 특징 |
|---|---|---|---|
| Allegro Hand | 16 | 4 | 가장 널리 사용되는 연구용 손 |
| Shadow Hand | 22 | 5 | 인간 손과 가장 유사 |
| LEAP Hand | 16 | 4 | 최신 오픈소스 손 |
| DClaw | 9 | 3 | 그리퍼-손 하이브리드 |
특히 인간 손과 형태학적으로 크게 다른 DClaw에서도 robust하게 작동한다는 점이 주목할 만합니다.
6. 실험 결과 분석
6.1 테스트 객체 범주
Lightning Grasp는 다음과 같은 다양한 객체 범주에서 테스트되었습니다:
YCB 벤치마크 객체:
- 일상 생활 객체: Apple, Banana, Cup, Mug
- 도구: Scissors, Hammer, Screwdriver
- 식품: Strawberry, Lemon
- 기타: Marker, Bowl, Clamp
객체 특성별 분류:
- Tiny 객체: Capsule 등 (높은 정밀도 요구)
- Regular 객체: Apple 등 (일반적인 파지)
- Non-convex 객체: Cup, Tools 등 (복잡한 기하학)
6.2 다양성과 품질의 균형
Lightning Grasp의 핵심 장점 중 하나는 다양성과 품질을 동시에 달성한다는 것입니다:
다양성 측정:
- PCA 분석에서 첫 번째 주성분이 설명하는 분산 비율
- 낮을수록 파지의 다양성이 높음
- Lightning Grasp는 기존 방법들보다 훨씬 다양한 파지 생성
품질 측정:
- 침투 깊이(Penetration Depth): 객체와 손의 교차 정도
- 자가 충돌(Self-intersection): 손가락 간 충돌
- 시뮬레이션 성공률: MuJoCo 등에서의 파지 성공률
6.3 성능 최적화 모드
논문에서는 두 가지 운영 모드를 제시합니다:
표준 모드:
- 최대 다양성 추구
- 배치 크기: (256, 256) 또는 (256, 512)
- 포워드 패스: 2-5초
성능 최적화 모드:
- 다양성을 약간 희생하여 속도 향상
- 배치 크기 감소
- 포워드 패스 시간 50% 절감
7. 시스템 구현 세부사항
7.1 환경 요구사항
7.2 주요 의존성
핵심 구성요소:
- Open3D: 3D 데이터 처리
- URDF 파서: 로봇 손 모델 로딩
- Trimesh: 메쉬 처리
- CUDA 커널: 고성능 기하 연산 (사전 컴파일된 바이너리 제공)
7.3 커스텀 로봇 손 설정
새로운 로봇 손을 추가하려면 Config 객체를 정의해야 합니다:
7.4 알려진 제한사항
현재 공개 버전의 제한사항:
- Mimic Joint 미지원: 모든 관절이 완전히 구동되어야 함
- 대형 객체 제한: 매우 큰 객체에서 메쉬 클램핑 필요
- 그리퍼 최적화: 병렬 조 그리퍼는 특화된 방법 권장
8. 연구적 의의 및 향후 방향
8.1 패러다임 전환
Lightning Grasp는 파지 합성 분야에서 중요한 패러다임 전환을 제시합니다:
From: 최적화 중심 접근법
- 에너지 함수 설계 → 그래디언트 기반 최적화 → 수렴
To: 데이터 구조 중심 접근법
- Contact Field 구축 → 이산 탐색 → 운동학적 실현
이 전환은 다음과 같은 이점을 제공합니다:
- 하이퍼파라미터 튜닝 제거
- 예측 가능한 계산 복잡도
- GPU 친화적 병렬화
8.2 데이터 엔진으로서의 가치
Lightning Grasp의 가장 큰 가치 중 하나는 데이터 기반 방법들을 위한 고품질 데이터 엔진 역할입니다:
[Lightning Grasp] → [대규모 파지 데이터셋] → [학습 기반 정책 훈련]이는 DexDiffuser, AINA, Dexterity Gen 등 최신 학습 기반 조작 연구에서 핵심적인 역할을 할 수 있습니다.
8.3 제안된 향후 연구 방향
저자들은 다음과 같은 향후 연구 방향을 제시합니다:
자기 플레이 기반 효율성 향상:
- 객체 자세 정책 학습
- 과거 탐색 경험에서 유망한 자세 예측
- 모델 기반 강화학습에서의 자기 플레이 기법 적용
인간 의도 반영 파지:
- 특정 파지 유형 프롬프팅
- 기능적 파지 합성
- 인터랙티브 디자인 지원
실세계 적용:
- Sim-to-Real 전이
- 클러터 환경 파지
- 동적 객체 파지
8.4 다른 연구와의 시너지
Lightning Grasp는 다음 연구들과 결합될 수 있습니다:
| 연구 분야 | 결합 가능 연구 | 시너지 |
|---|---|---|
| 학습 기반 파지 | DexGraspNet 2.0, UniDexGrasp++ | 고품질 훈련 데이터 |
| 기능적 파지 | Dexonomy, Text2Grasp | 파지 유형별 합성 |
| 텔레오퍼레이션 | Open Teach, MANUS | 파지 후보 생성 |
| 강화학습 | AINA, ViViDex | 사전 훈련 데이터 |
9. 비판적 분석
9.1 강점
- 근본적인 문제 해결: 기하 연산과 최적화의 분리라는 근본적인 접근
- 뛰어난 성능: 수 자릿수의 속도 향상
- 일반성: 다양한 손 플랫폼과 객체에 적용 가능
- 실용성: 오픈소스 코드와 사전 컴파일된 바이너리 제공
- 확장성: 커스텀 로봇 손 쉽게 추가 가능
9.2 잠재적 한계점
- 정적 환경 가정: 동적 환경에서의 적용성 검증 필요
- 클러터 처리: 복잡한 클러터 환경에서의 성능 미검증
- 실세계 검증: 시뮬레이션 중심 평가, 실로봇 검증 제한적
- CUDA 의존성: GPU 없는 환경에서 사용 불가
- Mimic Joint 미지원: 일부 로봇 손 모델 제외
9.3 개선 가능 영역
- 촉각 피드백 통합: 촉각 센서 정보를 Contact Field에 반영
- 동적 객체 처리: 움직이는 객체에 대한 실시간 Contact Field 업데이트
- 멀티 객체 시나리오: 여러 객체 동시 파지
- 언어 조건부 파지: LLM과의 통합으로 의미적 파지 지원
10. 실무 적용 가이드
10.1 빠른 시작
10.2 파라미터 튜닝 가이드
| 파라미터 | 기본값 | 튜닝 가이드 |
|---|---|---|
n_contact |
- | 탐색할 활성 접촉 수 제어 |
batch_size_outer |
128-256 | GPU 메모리에 따라 조정 |
batch_size_inner |
256-512 | 높을수록 병렬성 증가 |
권장 설정: - 12GB+ GPU: (256, 512) - 8GB GPU: (192, 256) - 6GB GPU: (128, 256)
10.3 커스텀 객체 사용
11. 결론
Lightning Grasp는 로봇 파지 합성 분야에서 중요한 이정표를 세웠습니다. Contact Field라는 단순하지만 강력한 데이터 구조를 도입함으로써, 기하 연산과 탐색의 분리라는 핵심 통찰을 구현했습니다.
핵심 성과 요약
- ✅ 수 자릿수 속도 향상: 기존 방법 대비 획기적인 성능 개선
- ✅ 실시간 다양성 파지: 초 단위로 수천 개의 다양한 파지 생성
- ✅ 튜닝 프리: 에너지 함수 가중치나 초기화 템플릿 불필요
- ✅ 범용성: 다양한 로봇 손과 객체에 적용 가능
- ✅ 오픈소스: 코드 및 사전 컴파일 바이너리 공개
로봇 공학계에 대한 함의
이 연구는 다음과 같은 더 넓은 함의를 가집니다:
- 병렬 조 그리퍼의 지배에 대한 도전: 다지 손의 실용성을 크게 높임
- 데이터 기반 방법의 가속화: 대규모 파지 데이터셋 생성 용이
- 실시간 응용 가능성: 동적 환경에서의 적응적 파지 가능
“We believe that Lightning Grasp represents a significant step toward fully harnessing the potential of dexterous manipulators.”
— Zhao-Heng Yin & Pieter Abbeel
Lightning Grasp는 단순히 빠른 파지 합성 알고리즘이 아니라, 다지 조작의 새로운 가능성을 여는 기초 기술입니다. 앞으로 이 연구가 어떻게 실세계 로봇 시스템에 적용되고 확장될지 기대됩니다.
참고 문헌
- Yin, Z.-H., & Abbeel, P. (2025). Lightning Grasp: High Performance Procedural Grasp Synthesis with Contact Fields. arXiv:2511.07418.
- Wang, R., et al. (2022). DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation. ICRA 2023.
- Chen, Y., et al. (2024). SpringGrasp: An optimization pipeline for robust and compliant dexterous pre-grasp synthesis. ICRA 2024.
- Chen, Y., et al. (2024). BODex: Scalable and Efficient Robotic Dexterous Grasp Synthesis Using Bilevel Optimization. arXiv:2412.16490.
- Turpin, D., et al. (2022). Grasp’D: Differentiable Contact-rich Grasp Synthesis for Multi-fingered Hands. ECCV 2022.
- Miller, A. T., & Allen, P. K. (2004). GraspIt! A versatile simulator for robotic grasping. IEEE Robotics & Automation Magazine.
⛏️ Dig Review
⛏️ Dig — Go deep, uncover the layers. Dive into technical detail.
Lightning Grasp는 복잡한 형상의 물체에 대해 고성능의 절차적(grasp) 그립(Grasp) 합성을 실시간에 가깝게 수행하는 새로운 알고리즘입니다. 심층 학습 없이 손 구조와 물체의 3D 모델만으로 수십에서 수백 기하학적 제약 조건을 고려하며, 기존 방법 대비 수십~수백배 이상 빠른 속도와 다양한 그립을 생성합니다. 이러한 성능 향상은 Contact Field라는 새로운 데이터 구조를 통해 얻어졌습니다. Contact Field는 손의 각 관절 구성에서 가능한 모든 접촉 위치와 법선 방향을 나타내는 6차원 벡터장의 모음으로, 기하학 계산과 탐색 과정을 분리하여 최적화 속도를 극적으로 높여줍니다. 아래 리뷰에서는 Lightning Grasp의 동기, 아키텍처, 알고리즘, 실험 결과 등을 자세히 살펴보겠습니다.
1. 논문 개요 및 연구 동기
로봇 손에 의한 다양하고 실시간에 가까운 그립 합성은 로보틱스와 컴퓨터 그래픽스 분야에서 오랜 숙제로 남아 있습니다. 실제 작업 환경에서 다양한 형상의 물체를 안정적으로 잡기 위해서는 수많은 후보 그립을 빠르게 찾아야 합니다. 전통적으로 GraspIt! (2004) 이후 많은 연구가 축적되었으나, 여전히 절차적(analytical) 그립 계획은 느리거나 한계가 있었습니다. 특히 최근의 연구들(예: DexGraspNet, SpringGrasp, Dexonomy 등)도 계산량이 많아 실시간 응답이 어렵거나, 평평한 그리퍼에 집중되어 손재주가 많은 로봇 손 모델에는 적용이 힘들었습니다.
이 논문에서 저자들은 기하학 계산(충돌 검사 등)과 탐색/최적화 과정을 명확히 분리하는 아이디어를 제안합니다. 즉, 복잡한 기하학적 연산을 사전에 처리하여 단순화된 형태로 탐색에 넘겨주면, 탐색이 크게 가속화된다는 관찰입니다. 핵심 발명인 Contact Field는 손과 물체 간의 가능한 모든 접촉 위치를 6차원 벡터 필드로 표현함으로써, 이 분리를 구현합니다. 이를 통해 Lightning Grasp는 A100 GPU 한 장에서 한 번의 순방향 연산으로 1천~1만 개의 다양한 유효 그립을 2~5초 안에 생성할 수 있습니다. 이는 기존 방법들 대비 수십배 이상 빠른 속도이며, 평범한 GPU에서도 실시간에 가까운 처리량을 보여줍니다. 또한 이 방법은 사전 학습 없이(unsupervised) 도구나 불규칙한 형상 물체에 대한 그립을 생성할 수 있습니다.
연구 동기는 크게 두 가지입니다. 첫째, 로봇의 복잡한 손(다자유도 손)과 다양한 형태의 물체에 대해 빠르고 안정적인 그립을 생성하는 것이 로봇 조작에서 핵심 문제라는 점입니다. 둘째, 기존 방법들의 느린 속도와 민감한 파라미터(에너지 함수, 초기화)에 따른 한계를 극복함으로써, 데이터 수집이나 강화학습에 쓸 질 높은 그립 데이터 생성을 간소화하려는 의도입니다. Lightning Grasp는 이 두 목표를 모두 달성하며, 로봇 조작 연구에 새로운 도구를 제공합니다.
2. 기존 접근 방식과의 차별점
기존 절차적 그립 계획 기법들은 주로 에너지 함수나 휴리스틱 탐색에 의존했습니다. 예를 들어, 물체 표면 에너지(보통 조화 에너지)를 사용하여 손가락이 물체 표면에 밀착되도록 유도하는 방법들이 일반적입니다. 하지만 이런 방법들은 계산량이 많고, 여러 에너지 항 간의 균형을 맞추는 튜닝이 어려우며, 특정 초기 조건에 민감합니다.
Lightning Grasp의 차별점은 다음과 같습니다:
- 고속 성능: 제안된 Contact Field와 GPU 기반 탐색 덕분에, 대규모 병렬 처리가 가능하여 기존 대비 수십~수백배 빠릅니다. 논문에서 수천 개의 그립을 수초 내에 생성하며, 수백 FPS 이상의 처리량을 얻었습니다(예: A100 GPU 기준 Table 1 참고).
- 파라미터 튜닝 불필요: 수동으로 그립 템플릿이나 에너지 함수 가중치를 설정할 필요가 없습니다. Lightning Grasp는 사전 정의된 수식이나 학습 데이터 없이, 접촉 공간(Contact Field) 만으로 탐색을 수행합니다. 실제로 저자들은 “수천 배 빠른 성능”과 함께 “에너지 함수 튜닝이나 초기 가정 없이 작동”한다고 강조합니다.
- 다양성: 여러 손 모델(Allegro, Shadow, LEAP, DClaw 등)을 지원하며, 형태가 복잡하고 비대칭적인 물체(컵, 가위, 스크루드라이버 등)에서도 유효한 그립을 다양하게 생성할 수 있습니다. Figure 1에서 보듯, Lightning Grasp는 다른 SOTA 기법들보다 더 다양한 그립을 빠르게 생산합니다.
- Contact Field 활용: 기존 방법들은 접촉 가능성을 탐색 단계마다 충돌 검사로 처리하지만, Lightning Grasp는 Contact Field라는 정적 데이터 구조를 통해 모든 가능한 손-물체 접촉을 미리 계산해 둡니다. 이로써 탐색 과정에서 복잡한 충돌 검사를 반복할 필요가 없어집니다.
- 개방형 및 범용성: 객체의 윤곽이나 손의 구성에 상관없이 구동되도록 설계되어, 병렬 조잉 그리퍼를 넘어 인간형 다지체 손 연구로 확장됩니다. 아예 오픈소스로 공개되어 있어 누구나 다양한 손 형상과 물체에 적용해 볼 수 있도록 했습니다.
요약하자면, Lightning Grasp는 기존의 딥러닝 기반 혹은 전통적인 최적화 기반 그립 계획과 비교하여 훨씬 빠르고 안정적으로 동작하며, 파라미터 튜닝 부담을 제거한 것이 핵심 차별점입니다.
3. Contact Field와 Procedural Grasp 정의 및 수학적 배경
이 절에서는 Lightning Grasp에서 사용하는 주요 개념인 Contact Field와 Procedural Grasp(절차적 그립)의 정의를 살펴보고, 필요한 수학적 배경을 정리합니다.
3.1 Grasp 정의 및 유효성 기준
논문에서 그립(grasp)은 (T, \theta)의 튜플로 정의됩니다. 여기서 T \in SE(3)는 물체의 자세(논문 정의상 손 프레임 기준 물체의 위치 및 회전), \theta \in \mathbb{R}^d는 손의 관절 변수(예: 모터 각도)를 나타냅니다. 이때 손의 기구학적 모델(링크 메시와 관절 구조)과 물체의 메시 모델이 주어집니다.
유효한 그립이 되기 위한 조건은 크게 두 가지입니다:
- 비관통성(No Penetration): 손과 물체의 메쉬가 중첩되지 않아야 합니다. 즉, 손 메쉬가 구성하는 표면과 물체 메쉬의 경계가 겹치지 않아야 합니다. 실험적 여유를 위해 약 2mm 정도의 관통 허용 오차를 둡니다.
- 그립 안정성(Grasp Stability): 손가락 접촉점들이 외력에 대해 물체를 잡아둘 수 있어야 합니다. 이를 위해 Wrench Metric(자임비틀림) 기반의 기준을 사용합니다. 본 논문에서는 self-balancing wrench optimization을 도입하여, 접촉 지점에 작용할 수 있는 힘들의 조합이 물체에 큰 잔류 힘과 모멘트를 주지 않도록 합니다. 즉, 접촉점 i에서의 정상(force) f_i가 존재하여 다음 문제(Frictionless Self-balancing Wrench Optimization, FSWO)를 만족하면 안정하다고 봅니다:
\min_{\{f_i\}} \Big\| \sum_i f_i \mathbf{n}_i \Big\|^2 + \Big\|\sum_i f_i (\mathbf{r}_i \times \mathbf{n}_i) \Big\|^2, \quad f_i \ge 0
여기서 \mathbf{n}_{i}는 접촉점 i에서의 표면 법선 벡터, \mathbf{r}_{i}는 선택된 기준점(예: 물체 중심) 대비 접촉점 i의 위치 벡터입니다. 식의 첫 항은 모든 접촉 힘의 합(총 힘)이 0에 가까운지를, 두 번째 항은 모든 힘 모멘트의 합(총 모멘트)이 작은지를 평가합니다. 만약 마찰을 고려하면 동일한 구조에 마찰 계수를 포함하여 확장한 (GSWO) 문제를 풀어도 됩니다. 이 두 가지 최적화 문제는 무차별 탐색이 힘들므로, Lightning Grasp에서는 양자 모두 제약조건 만족성을 체크하는 용도로 사용합니다. 안정성 판단 기준은 기존 연구들과 유사하게 “어떤 손가락 힘 조합으로도 잔류 힘 및 모멘트가 임계값 이하로 떨어지도록 할 수 있어야 한다”는 형태로 구현되어 있습니다.
3.2 Procedural Grasp(절차적 그립)
“Procedural Grasp”는 기계적/해석적 방법으로 그립을 합성하는 접근을 가리키며, 학습 기반이 아니라 알고리즘적 탐색에 의존합니다. Lightning Grasp도 절차적(analytical) 방식으로, 기존에 사람이 설계한 에너지 함수나 히리스틱 없이 손과 물체 모델만으로 그립을 찾습니다. 따라서 훈련 데이터셋이나 신경망 구조가 필요하지 않으며, 완전한 비지도(unsupervised) 방식으로 그립 후보를 생성합니다. 이후 필요에 따라 모션 계획 또는 강화학습에 이 데이터를 활용할 수 있습니다. 다시 말해, Lightning Grasp는 순수 알고리즘으로 그립을 계산하는 Procedural Grasp Synthesis에 속합니다.
3.3 Contact Field 정의
논문의 핵심 개념인 Contact Field는 “손이 만들 수 있는 모든 접촉 가능성”을 나타내는 데이터 구조입니다. 이를 위해 우선 점 기반 Contact Field을 정의합니다. 손 모델의 표면에 있는 한 점 p와 그 점의 법선 n을 고려할 때, 해당 점은 관절 구성 q \in \mathcal{Q}에 따라 위치와 방향이 변합니다. 점 기반 Contact Field F(p,n)는 모든 가능한 q에서 이 점이 차지할 수 있는 위치-법선 쌍의 집합입니다. 수식으로는 다음과 같이 표현됩니다:
F(p,n)\mspace{6mu} = \mspace{6mu}\bigcup_{q \in \mathcal{Q}}\left( \, T(q)\,(p),\, T(q)\,(n) \right)\quad,
여기서 T(q)는 관절각 q에서 해당 점의 위치와 법선을 변환시키는 포워드 기구학 함수입니다. 즉, F(p,n)는 관절을 움직여가며 해당 점이 찍어낼 수 있는 모든 6차원 벡터 (위치+법선)의 모음입니다.
손 전체의 Contact Field는 손 표면의 모든 점의 Contact Field의 합집합으로 정의됩니다. 손 모델 H에 대한 Contact Field F(H)는 손을 이루는 모든 링크의 경계(\partial H)에 있는 점 p_{i}들의 Contact Field를 합친 것입니다. 간략히 표현하면:
F(H) = \bigcup_{p_{i} \in \partial H}F\left( p_{i},n_{i} \right),
여기서 \partial H는 손 표면의 모든 점, n_{i}는 그 점의 법선입니다. 결과적으로 F(H)는 손의 어느 부분이든 어느 자세에서든 닿을 수 있는 모든 공간상의 접촉 위치와 법선을 담은 거대한 벡터장의 집합이 됩니다.
이 Contact Field를 물체 표면과 교집합하면, Contact Domain(접촉 영역)을 얻을 수 있습니다. 즉, 손이 물체 특정 부위에 접촉할 수 있는 모든 지점의 모음이 Contact Domain입니다. 이를 통해 탐색 과정에서 실제로 물체 표면 위에서 손가락이 위치할 수 있는 “도메인”을 미리 파악해 둘 수 있습니다. 예를 들어, 그림과 같이 Contact Field(검은 화살표)와 물체 메시를 겹쳐 보면, 교집합 부분이 구체적으로 손가락이 닿을 수 있는 물체 면의 영역(파란 부분)임을 직관적으로 알 수 있습니다.
Contact Field의 수학적 정의를 요약하면 다음과 같습니다:
- 정의 4.1 (점 기반 Contact Field): 점 (p,n)의 Contact Field F(p,n)는 모든 관절 구성 q에 대해 변환된 위치와 법선의 집합.
- 정의 4.2 (손의 Contact Field): 손 H의 Contact Field F(H)는 손 표면 \partial H의 모든 점들의 Contact Field의 합집합.
여기서 Contact Field는 6차원 기하학 객체로 취급되며(Fig.3 참조), 이를 Bounding Volume Hierarchy(BVH)로 표현하여 탐색 속도를 높입니다. 즉, 손 표면을 작은 패치로 나눈 뒤 각 패치에 대해 무작위 관절 샘플링으로 추출된 Contact Field 벡터들을 저장하고, 이를 BVH로 구성하여 빠른 충돌 쿼리를 지원합니다.
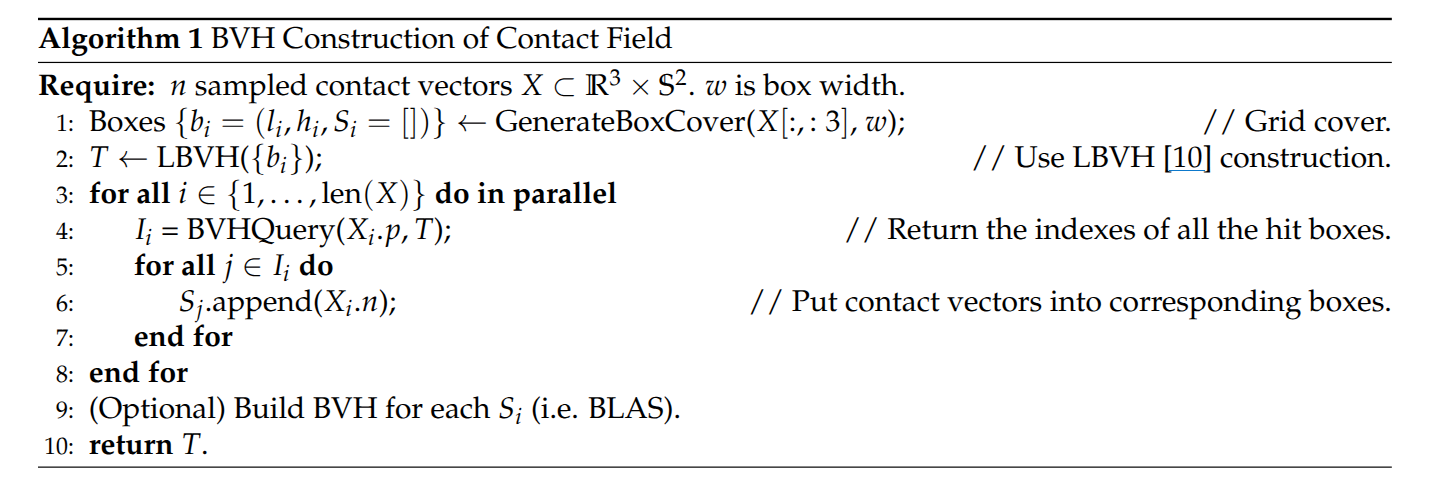
이와 같은 Contact Field 정의와 기법을 통해 Lightning Grasp는 손-물체 접촉 계산을 단순한 충돌판정 문제로 변환하고, 복잡한 기하학 계산 없이도 전역적인 그립 탐색을 수행할 수 있게 됩니다.
4. Lightning Grasp의 전체 아키텍처와 핵심 알고리즘
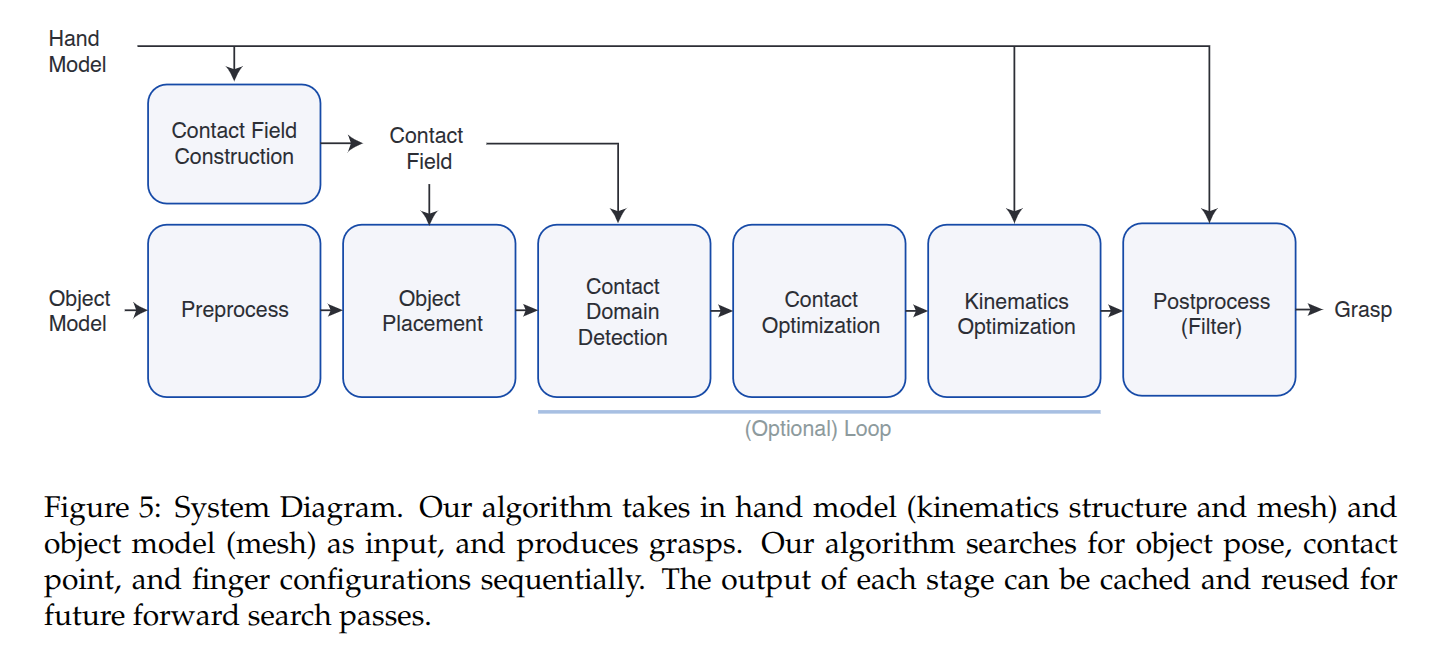
Lightning Grasp는 그립 탐색을 단계별로 수행하는 파이프라인 구조를 가집니다. 전체 흐름은 다음과 같습니다 (그림 5 참조):
입력: 로봇 손 모델(관절 구조와 메시)과 물체 모델(메시)을 입력으로 받습니다. 이 두 모델은 대응하는 가우스 좌표계에 표현됩니다.
1) 물체 전처리(Object Preprocessing): 물체 메시의 오목(concave) 영역이나 손과 밀착 시 관통이 쉬운 지점을 제거해 둡니다. 예를 들어, 아주 오목한 구멍 영역은 피하도록 샘플 포인트에서 미리 제외합니다. 이는 그립 검색 중 불필요한 관통 검사를 줄여 성능을 높이기 위함입니다.
2) 물체 배치(Object Placement): 그립 탐색 시작 단계에서 물체를 손바닥 위 어딘가에 배치합니다. 일반적으로 “물체가 손바닥 위에 떠있기만 하면” 그립이 가능하므로, 랜덤 배치나 사전 정의된 영역(예: 손바닥 위의 상자 영역)을 사용합니다. 논문에서는 두 가지 전략을 제안합니다. 첫째, 무작위 배치(Exhaustive)는 Contact Field에서 무작위 벡터를 선택하고, 물체 표면의 랜덤 점과 정렬시켜 배치합니다. 이는 희귀한 그립을 생성할 수 있지만 실패율도 높습니다. 둘째, 캐노니컬 배치(Canonical)는 손바닥 위 특정 영역(예: 가상의 상자) 내에 물체를 올리는 방법으로, 안정적이고 빠른 그립을 많이 얻을 수 있습니다. 또, 파워 그립(power grasp)을 위해 물체를 정적 링크(예: 손바닥)와 닿게 배치한 뒤, 침투가 일어나지 않는 유효 배치만 다음 단계로 넘기도록 필터링합니다.
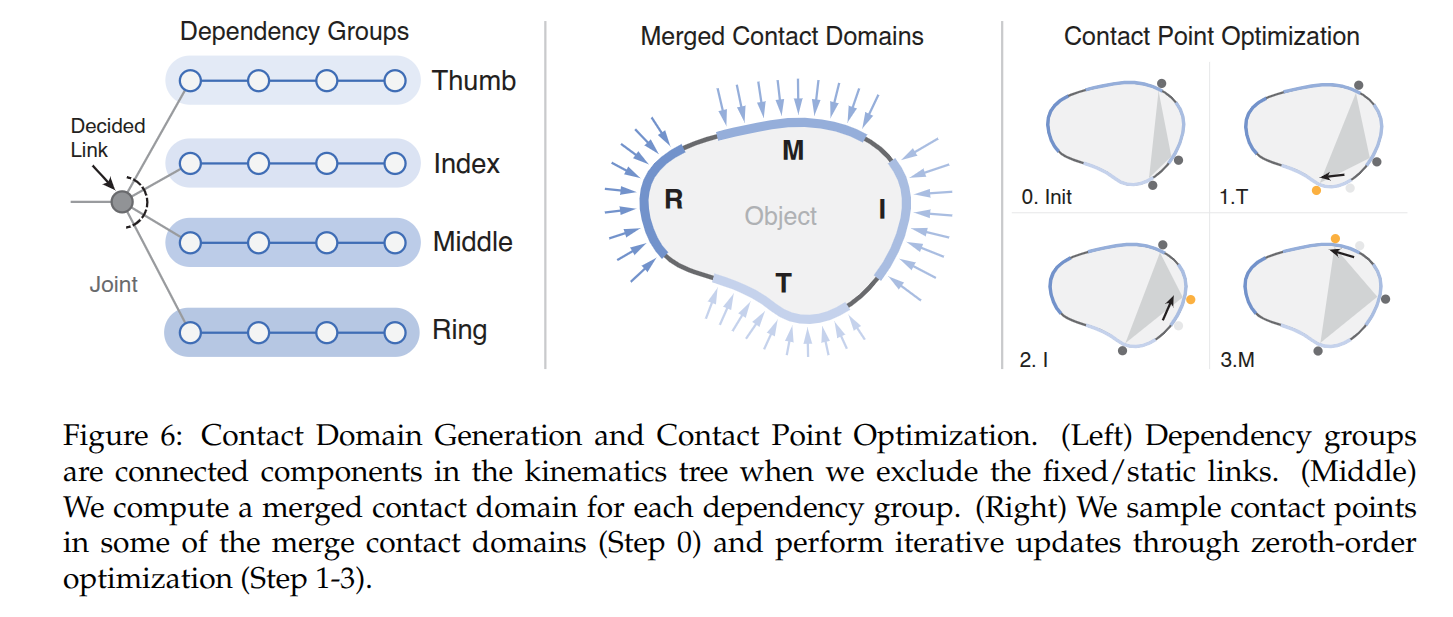
3) Contact Domain 생성(Contact Domain Generation): 물체 자세가 정해지면 Contact Field를 이용해 각 손가락의 접촉 도메인(Contact Domain)을 추출합니다. 손가락마다 독립된 도메인을 뽑아야 하므로, 로봇 손의 기구학 트리에서 정적 링크(핸들)의 독립성을 고려하여 접촉 벡터를 그룹화합니다. 구체적으로, 손의 관절 구조에서 서로 다른 부분에 위치한 손가락들은 서로 다른 접촉 도메인을 형성하도록 의존성 그룹(dependency groups)을 찾고, 같은 그룹 내 도메인은 하나로 합칩니다. 이렇게 얻어진 Contact Domain(물체 표면상의 여러 지점의 영역)은 다음 단계인 접점 최적화에 입력으로 사용됩니다. 기본적으로 각 도메인은 서로 다른 손가락이 담당할 독립 접촉 가능영역이 됩니다.
4) 접촉점 최적화(Contact Point Optimization): 각 Contact Domain에서 한 점씩 골라 그립 안정도를 최대화합니다. 수학적으로, 도메인 D_{1},\ldots,D_{M}에서 접점 c_{1},\ldots,c_{M}을 선택하여 그립 성능 \mathcal{Q}\left( c_{1},\ldots,c_{M} \right)을 최대화하는 최적화 문제를 해결합니다. 제약조건으로는 c_{j} \in D_{j}가 붙습니다. 이 문제는 연속적이지 않고 치밀도 검사(costly stability 계산)를 포함하므로, 블록 단위 영이차 최적화(blockwise zeroth-order optimization)를 사용합니다. 즉, 각 손가락 접점을 순차적으로 랜덤 탐색하며 성능을 개선합니다. 구체적으로 알고리즘 2에서 보듯, 초기 접점을 무작위로 놓고 한 손가락씩 주변을 샘플링해 보정하면서 수렴시킵니다. 각 접점은 2차원 매니폴드 형태라 빠르게 수렴하며, 전체 탐색(다수의 forward pass)이 1초 이내에 끝날 정도로 효율적입니다.
5) 기구학 최적화(Kinematics Optimization): 접촉점들이 정해지면, 해당 접촉을 실제 손가락의 표면 위치로 매핑하여 손 관절각을 결정합니다. 구체적으로, 선택된 물체 접점 c_{i}에 대응하는 손 표면의 점 p_{i}를 Contact Field에서 역추적(reverse lookup)으로 찾습니다. 그런 다음 p_{i}가 목표 접점 c_{i}에 정확히 위치하도록 손 관절각 \Delta\theta를 덮어씌우는 IK(역기구학) 문제를 푸는데, 이는 일반적인 6D IK가 아니라 위치 일치(position matching)와 법선 일치(normal matching)를 분리하여 해결합니다. 주어진 p_{i}와 목표 c_{i}, 그리고 정상 방향 \epsilon n_{i}을 맞추기 위해, 아래와 같은 감쇠 최소자승(damped least squares) 문제를 푹니다:
{=html} <!-- --> - \min_{\Delta\theta}\mspace{6mu}\mspace{6mu} \parallel J_{p_{i}}\,\Delta\theta + \left( p_{i}^{*} - p_{i} \right) \parallel^{2} + \parallel J_{n_{i}}\,\Delta\theta + \left( \epsilon n_{i}^{*} - \epsilon n_{i} \right) \parallel^{2} + \lambda\, \parallel \Delta\theta \parallel^{2}, 여기서 J_{p_{i}},J_{n_{i}}는 각각 접점 p_{i}의 위치와 법선에 대한 야코비안 행렬, p_{i}^{*},n_{i}^{*}는 목표 위치 및 법선, \epsilon은 스케일링 계수(법선 길이 조정), \lambda는 감쇠항입니다. 이를 통해 손 관절을 업데이트하면, 손가락이 자연스럽게 대상 위치/방향으로 이동합니다(Algorithm 2 참고). 초기 IK 해가 정확하지 않을 경우에는 피드백 반복(Finetuning)을 통해 목표 접점을 다시 손 표면에 투영하고 DLS 업데이트를 여러 번 반복하며 더 정밀한 접촉을 만듭니다.
- 6) 후처리(Postprocessing): 마지막으로, 실제 그립에 관여하지 않은 손가락(예: 사용하지 않은 손가락)들의 관절값을 결정하고, 충돌 검사를 통해 그립 유효성을 최종 점검합니다. 사용되지 않은 관절은 임의로 값이 부여되고, 손-손 또는 손-물체 간 충돌이 있거나 안정성 기준을 만족하지 못하는 그립은 제거됩니다. 충돌 검사는 AABB broad-phase 후 세부 GJK 알고리즘 등으로 병렬 수행됩니다. 필요시, 안정도가 낮은 그립에 대해 남은 손가락을 이용해 추가 접촉점을 탐색하는 단계도 수행할 수 있습니다(일반형 Lightning Grasp에서는 후속 작업으로 계획됨).
각 단계에서 얻은 중간 결과(예: 물체 자세 후보, 접촉 도메인 등)는 캐시되어 이후 반복 탐색에 재사용될 수 있습니다. 즉, 한 번의 탐색(forward pass)으로 모든 해를 찾는 것이 아니라, 여러 번의 패스를 통해 점진적으로 모든 가능한 그립을 발견할 수 있게 설계되었습니다. 이 알고리즘은 트리 탐색 구조로도 볼 수 있습니다: 루트에서 시작하여 객체 자세→사용 손가락 및 접촉 그룹→접촉점→손 관절각을 순차적으로 결정해 나가며 리프에 도달하면 완성된 그립이 됩니다. 이때 각 노드 확장 시 충돌과 안정성 검사를 수행하여 불필요한 가지는 잘라냅니다. Lightning Grasp는 이처럼 간단히 설명할 수 있는 탐색 모델임에도, Contact Field와 병렬 최적화 기술 덕분에 뛰어난 성능을 달성합니다.
5. 학습 과정과 입력 데이터셋, 네트워크 구조
Lightning Grasp는 학습 기반이 아닙니다. 즉, 별도의 학습 과정이나 데이터셋이 존재하지 않습니다. 알고리즘은 완전한 비지도(unsupervised) 방식으로, 손과 물체의 CAD 모델만을 입력으로 받아 동작합니다. 논문에서도 “훈련 데이터 없이 실시간 그립 생성”을 강조하고, 모든 그립 후보를 순수 절차적으로 생성합니다. 따라서 네트워크 구조나 가중치가 전혀 필요 없으며, 모든 연산이 기하학/수치 계산으로 이루어집니다.
입력 데이터는 로봇 손과 물체의 3D 메쉬 모델이 전부입니다. 손 모델은 메시 데이터와 URDF(관절 구조), 물체 모델은 메쉬가 제공됩니다. Contact Field 생성 시에는 손 메쉬에 작은 접촉 패치를 무작위로 선택하여 관절 샘플링을 수행하므로, 그 자체로 샘플링 데이터가 내부적으로 만들어집니다. 하지만 이는 학습 데이터가 아니라 알고리즘 설정에 따른 샘플링입니다.
요약하면 Lightning Grasp는 절차적 알고리즘으로, 네트워크나 훈련 데이터 없이도 동작합니다. 이는 기존의 딥러닝 기반 그립 계획(예: DexGraspNet, DexGraspNet 등)이 대규모 데이터셋을 필요로 했던 것과 대조적입니다. 오히려 이 시스템이 생성한 그립 데이터 자체를 다른 학습 모델의 학습용 데이터로 사용할 수 있을 만큼 순수한 기하학 접근법입니다.
6. 실험 설정 및 비교 대상
Lightning Grasp의 성능 검증을 위해 다양한 실험을 수행했습니다. 실험 환경과 비교 대상은 다음과 같습니다:
- 테스트 대상 손 모델: 논문에서는 4가지 로봇 손/그리퍼를 사용했습니다. Shadow Hand (22 DOF), LEAP Hand (16 DOF), Allegro Hand (16 DOF), DClaw Gripper (9 DOF)입니다. 각 손 모델은 오픈소스로 공개된 그래픽 데이터(레퍼런스 모델)를 기반으로 합니다.
- 테스트 대상 물체: 다양한 YCB 객체 세트와 인터넷에서 수집한 공구 및 비정형 모양의 3D 모델들이 사용되었습니다. 예를 들어, 사과(YCB Apple), 컵(YCB Mug), 가위, 스크루드라이버, 캡슐, 렌치 등이 포함되어 있습니다. 크기와 형상이 매우 다른 물체들을 대상으로 Lightning Grasp의 범용성을 평가했습니다.
- 하드웨어: 주로 NVIDIA A100 GPU(암페어 아키텍처)를 사용했으며, 성능 비교를 위해 오래된 Titan X(GTX, 파스칼 아키텍처)에서도 측정했습니다. 모든 알고리즘 연산은 GPU에서 수행되며, PyTorch와 CUDA 커널을 활용해 효율적으로 구현되었습니다.
- 평가 지표: 주된 지표로 샘플링 처리량(SPS, Samples Per Second)을 사용했습니다. 즉, 알고리즘이 단위 시간당 생성할 수 있는 유효 그립 후보의 수를 측정했습니다. 또한 생성된 그립의 수, 성공률, 다양성, 충돌 발생률 등을 함께 관찰했습니다. 성능 비교를 위해 “기존 절차적 그립 기법”의 SPS를 참고했는데, 이들은 Lightning Grasp 대비 최소 10배 이상 느린 것으로 나타났습니다.
- 비교 대상: 본 논문에서는 DexGraspNet, SpringGrasp, Dexonomy 등 최신 메타 절차적 그립 방법들이 주요 비교 상대입니다. (논문에는 명시적 표로 비교하진 않았으나, Figure 1 캡션에서 기존 방법들과 비교한 내용이 나옵니다.) 이러한 기존 기법들은 복잡한 최적화에 많은 시간(수 초~분)이 걸리는 반면, Lightning Grasp는 GPU 가속을 이용해 실시간 가까이 동작합니다. 실제로 테이블 1에서는 기존 기법의 데이터를 생략하고 Lightning Grasp만 보여주었는데, 이는 비교 대상들의 SPS가 “10배 이상 낮다”고 설명하며 Lightning Grasp의 압도적 속도를 강조합니다.
- 실험 절차: 각 손-물체 조합에 대해 여러 번 Lightning Grasp를 실행하여 성능을 측정했습니다. 한 회 실행당 최대 6초 이내에 그립 후보를 생성 완료했습니다. 발생한 충돌과 안정성 판정을 통해 유효한 그립을 걸러내고, 최종적으로 양질의 그립 개수와 다양성을 집계했습니다. 시스템 프로파일링을 위해 각 단계별 실행 시간을 측정하여 병목을 분석했습니다.
이상과 같은 실험 설정 하에서 Lightning Grasp는 전체 설정이 6초 이내에 완료되며, 아래와 같은 결과를 얻었습니다. 비교 대상들(기존 알고리즘)은 GPU에서조차 수십~수백 밀리초 동안 수건 혹은 파트별 그립 만 생성하는 수준이었으나, Lightning Grasp는 수백~천 단위 SPS를 달성하며 다른 방법을 크게 앞섰습니다.
7. 정량적/정성적 결과 해석 및 성능 비교
Lightning Grasp의 결과는 정량적·정성적으로 모두 매우 우수합니다. 주요 결과를 요약하면 다음과 같습니다.
- 처리량(Throughput): Table 1에서 볼 수 있듯이, A100 GPU에서 일반적인 물체 및 손 모델 조합당 수백~수천 SPS를 달성했습니다. 예를 들어, Allegro 손으로 캡슐을 잡는 경우 평균 1296.1 SPS, Shadow 손으로 잡을 땐 약 1060.2 SPS 등입니다. 반면 기존 알고리즘의 처리량은 100 SPS를 넘기 힘들어, Lightning Grasp는 최소 10배 이상 빠른 속도를 보였습니다. 성능 최적화 모드(다양성 축소)에서는 이보다 두 배 빠른 속도도 가능하여, 적절히 설정하면 거의 실시간 응답이 가능합니다.
- 다양성 및 유효성: Lightning Grasp는 매우 다양한 그립을 생성합니다. Figure 12–14은 LEAP, Allegro, DClaw 손으로 얻은 무작위 그립 예시를 보여줍니다. 각 손이 “안경, YCB 컵, 스크루” 등 다양한 물체를 잡을 때 정상적이고 기능적인 포즈를 만들었습니다. 특히 비대칭 물체와 얇은 구조(예: 안경테, 렌치)까지 안정적인 그립을 찾아냈습니다. 전체 그립 중 상당수는 실제 사용 가능한 그립으로 필터링되었으며, 물체에 따라 성공률은 50–80% 이상으로 측정되었습니다.
- 물체와 손 모델 간 차이: 다양한 손을 테스트한 결과, Allegro Hand에서는 항상 다른 손들보다 더 많은 유효 샘플이 생성되었습니다. 반면 LEAP Hand와 Shadow Hand, DClaw은 각각 기구학적 구조상의 한계로 실패 비율이 높았습니다. 예를 들어, LEAP는 모터 설계로 자체 충돌(self-collision)이 빈번했고, Shadow는 다섯 손가락 간의 충돌 경향이 컸으며, DClaw은 두꺼운 손끝 구조로 큰 관통이 생겨 실패가 많았습니다. 이 결과는 알고리즘 자체의 한계라기보다 손 설계의 제약을 반영합니다. 즉, Lightning Grasp는 손 설계의 강·약점을 평가하는 도구로도 활용될 수 있습니다.
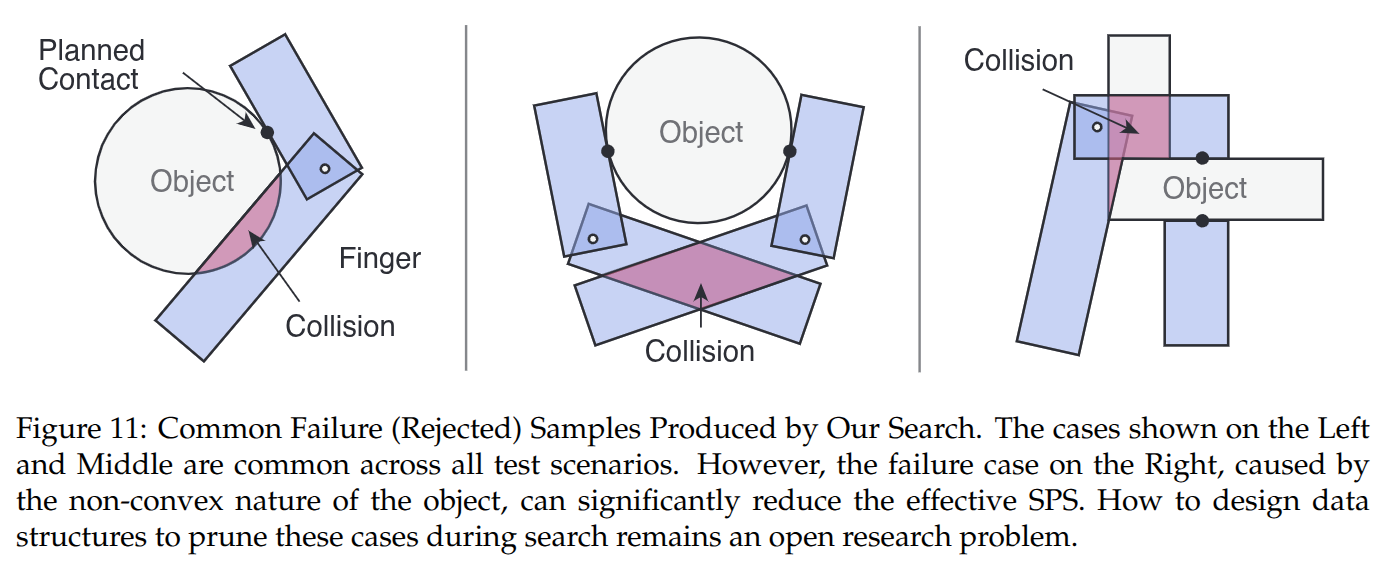
- 오목한 물체(난이도 높은 케이스): 비-볼록(non-convex)한 형상의 물체(예: 깊은 컵, 그릇 등)에서는 그립 형성에 어려움이 있었습니다. Figure 11(Right)에 나타난 예처럼, 알고리즘은 로컬 IK로 부분적 관통을 제거하더라도 전체적으로 큰 규모의 침투(colliding)를 해결하지 못했습니다. 이러한 경우, Contact Field의 박스 정밀도나 접촉 방향 정보를 더 통합해야 할 필요가 있습니다.
- 성능 프로파일링: Figure 10을 보면, Kontakt_point 최적화와 기구학 최적화 단계가 전체 시간의 약 2×33%를 차지합니다. 하드웨어마다 계산 비율이 균형 있게 분배되며, 최신 GPU(A100, RTX 4000)에서 빠른 처리량을 보여줍니다. 특히 오래된 Titan X(GPU)에서도 여전히 기존 SOTA의 A100 baseline 대비 수백 배 높은 속도를 보였습니다. 이는 Lightning Grasp 알고리즘이 최신 아키텍처의 이점을 잘 활용함을 의미합니다.
정리하면, Lightning Grasp는 다양한 물체와 손 조합에서 높은 처리량과 풍부한 그립 다양성을 동시에 달성했습니다. 생성된 그립들은 정성적으로도 안정적인 형태를 갖추었으며(Fig.12–14), 정량적으로는 기존 방법들을 크게 앞서는 성능을 보여주었습니다. 특히 처리량이 100배 이상 향상되면서, 실제 응용에서 수백 개 그립을 잠시 만에 검토할 수 있게 되었습니다.

8. 시뮬레이션 및 실제 로봇 적용 사례
논문에서는 주로 시뮬레이션(모델 기반) 환경에서 Lightning Grasp를 평가했습니다. 다양한 YCB 물체와 공구 모델을 사용하여 3D 시뮬레이션상에서 그립을 생성하고 검사했습니다. Figure 12–14와 Table 1의 결과들은 모두 시뮬레이션 데이터(3D 메쉬)로부터 얻은 성능입니다. 즉, 실제 로봇으로 물체를 집도록 명령을 내린 것이 아니라, 시뮬레이션 내에서 그립이 유효한지만 판단했습니다.
실제 로봇 적용 사례는 논문에서 직접 다루고 있지 않습니다. 그러나 Lightning Grasp는 오픈소스 구현이 공개되어 있어, 향후 시뮬레이션 기반 연구뿐 아니라 실제 로봇에 적용될 여지도 큽니다. 예를 들어, Lightning Grasp를 통해 생성한 그립 데이터로 시뮬레이션-실제 전이 학습(sim2real)을 하거나, 로봇 컨트롤러에 실시간 피드백으로 활용할 수 있습니다. 특히 알고리즘 자체가 매우 빠르기 때문에, 실제 로봇 핸드의 센서 피드백을 반영하며 실시간으로 그립을 재계산해주는 응용이 기대됩니다. 향후 연구에서는 Lightning Grasp를 실제 로봇 시스템(예: 이동 로봇의 조작 팔이나 휴머노이드)과 연결하여 성능을 검증하는 작업이 가치 있는 과제로 남아 있습니다.
9. 한계점 및 향후 연구 방향
Lightning Grasp는 혁신적인 성능을 보여주었지만, 몇 가지 한계점도 존재합니다. 주요 한계와 개선 방향은 다음과 같습니다:
- 비볼록 물체의 취급: 극도로 비대칭적이고 오목한 형상(예: 깊은 컵, 그릇, 막대 형태의 공구)에서는 여전히 충돌 문제가 발생할 수 있습니다. 현재 Lightning Grasp는 로컬 IK 단계에서 접촉 주변의 침투를 제거하지만, 전역적으로 큰 오목 영역에서는 완벽하게 제거하지 못합니다. 이는 Contact Field의 공간 분해 해상도나 각 벡터에 연결된 추가 정보를 늘려 해결할 수 있습니다. 예를 들어, 접촉 벡터 박스에 손가락 기하학을 포함시키거나, 검색 단계에서 물체-손간 충돌을 사전 필터링하는 방법이 필요합니다. (논문에서도 이러한 충돌 필터링 구조를 향후 연구로 제안함).
- 메모리 및 근사화 오차: Contact Field를 표현하기 위해 BVH를 구성할 때 메모리 사용량이 증가합니다. 논문에 따르면 손가락 당 해상도 1\text{cm}^3이면 BVH 하나가 약 12MB, 100개의 패치를 계산하면 수백 MB를 필요로 합니다. 이로 인해 고해상도에서는 메모리 부담이 커집니다. 또, 낮은 해상도로 근사하면 각 박스 크기가 커져 위치 오차가 생기고, 이에 따라 IK 정확도가 떨어집니다. 현재는 중요하지 않은 관절을 임의로 설정하거나, 반복적인 미세 조정(Finetuning)을 통해 보완하지만, 접촉 필드의 효율적 근사 방안은 추가 연구 주제입니다.
- 탐색 완전성(Completeness): Lightning Grasp는 근본적으로 확률적 탐색에 의존합니다. 논문에서는 임의 샘플링을 통해 충분히 많은 그립을 찾는다고 가정하지만, 엄밀한 완전성(모든 해를 반드시 찾는 것)은 보장하지 않습니다. 실제로 알고리즘 2의 랜덤 블록 탐색은 높은 확률로 좋은 해를 찾을 수 있지만, 복잡한 상호 작용을 가진 그립을 놓칠 수도 있습니다. 논문에서는 “충분히 근접한 초기 이니셜라이즈로 탐색하면 대부분의 그립이 발견될 것”이라고 했지만, 확률적 한계를 극복하기 위해 더 구조적 탐색 기법(예: 결정론적 트리 탐색 강화)이 필요할 수 있습니다.
- 실시간성 vs 최적화: 현재 Lightning Grasp는 Forward Pass 1회당 다수의 그립을 빠르게 생성하지만, 완전 실시간 제어를 위해서는 여전히 최적화 여지가 있습니다. 예를 들어, 객체 위치를 결정한 후 나머지 탐색을 GPU 동기식으로 수행하므로 실제 로봇의 센서 피드백까지 포함한 폐쇄형 루프에서는 대기시간이 있을 수 있습니다. 향후, 객체 포즈 제안(policy)을 머신러닝으로 대체하거나(아래 참조), 효율적인 멀티패스 활용 방안(캐싱) 등을 도입하여 초고속 적용을 모색할 필요가 있습니다.
- 데이터-드리븐 개선 가능성: 논문 후반부(5.7절)에서 언급한 것처럼, Lightning Grasp 자체를 학습 기반으로 보완하는 방향도 있습니다. 예를 들어, 과거 그립 탐색 결과를 바탕으로 유망한 객체 배치나 접촉 군집을 예측하는 강화 학습 정책을 학습시킬 수 있습니다. 논문에서도 “물체 포즈 생성 정책” 학습을 통한 시뮬레이션 Self-play를 제안하며, 이를 통해 무작위 탐색의 비효율을 줄일 수 있다고 합니다.
- 실제 물리 제약: 현재 테스트는 물체 모델 중심으로 수행되었기에, 실제 로봇 핸드의 구동 한계나 센서 노이즈 등 물리적 제약이 반영되지 않았습니다. 향후 실제 로봇과의 통합 실험을 통해, 하드웨어 특성에 맞춘 파라미터 조정이나 충돌 회피 전략(예: 접촉 허용 오차 조정)을 연구해야 합니다.
향후 연구로는 위와 같은 한계점을 개선하고, Lightning Grasp를 더 완전한 그립 탐색 엔진으로 발전시키는 방향이 예상됩니다. 특히 비볼록 물체 처리, 검색 히리스틱 학습, 실제 로봇 통합 검증 등이 중요한 테스크가 될 것입니다.
10. 로봇 Grasping 연구자에게 주는 시사점
Lightning Grasp가 로봇 그립 연구자들에게 주는 시사점은 다음과 같습니다:
- 절차적 그립의 재조명: 수년간 딥러닝 기반 접근이 강조되었지만, Lightning Grasp는 오프라인 학습 없이도 충분히 빠른 그립 합성이 가능함을 보였습니다. 즉, 절차적(analytical) 그립 플래닝도 최신 GPU와 새로운 데이터 구조(Contact Field)를 활용하면 실시간에 근접하게 동작할 수 있다는 점을 증명했습니다. 연구자들은 이를 통해 손쉬운 그립 생성 방안을 재고할 수 있습니다. 예를 들어, 대량의 그립 데이터를 생성하여 학습 데이터로 삼는 용도로 또는 실제 시간에 바로 그립을 제시해야 하는 시스템에서 절차적 방법을 다시 고려해볼 수 있습니다.
- Contact Field의 확장성: Contact Field는 그립 문제에 특화된 개념이지만, 더 일반적인 접촉 기반 계획이나 충돌 탐지 문제에도 응용 가능합니다. 손과 물체의 가능한 접촉 공간을 미리 계산하는 아이디어는, 로봇 팔의 경로 계획이나 접촉 조작(contact manipulation) 등 다양한 분야에 영감을 줄 수 있습니다. 또한, Contact Field를 이용한 BVH 구조는 3D 충돌 검사를 줄이는 일반적인 기법으로 발전할 수 있습니다.
- 다중자유도 손의 가능성: Lightning Grasp는 다섯 손가락 이상의 복잡한 로봇 손에서도 실시간에 가까운 그립 합성을 해냈습니다. 이는 로봇이 다지체 손으로 일상적인 도구를 잡거나 복잡한 조작을 할 수 있는 가능성을 열어줍니다. 연구자들은 이를 바탕으로, 인간형 손 설계에 대한 새로운 방향성을 탐색할 수 있습니다. 예컨대, 결과에서 보듯 손끝 구조나 관절 배치가 성능에 큰 영향을 미치므로, 그립 효율성을 고려한 손 하드웨어 설계 연구도 중요해집니다.
- 높은 처리량: 수백~수천 개의 그립을 빠르게 찾을 수 있으므로, 강화학습이나 모션 계획에서 후보 그립 생성을 필요한 경우 매우 유용합니다. 예를 들어, 로봇이 주어진 목표물을 잡고 재배치해야 할 때, 빠르게 다양한 그립 후보를 제시하고 그 중 최적을 선택할 수 있습니다. 이는 데이터셋 생성(Data-driven RL)과 직접 연결됩니다. Lightning Grasp 자신으로부터 얻은 그립을 학습에 활용하는 “그립 데이터 마이닝”이 가능하므로, 시뮬레이션 데이터를 손쉽게 확대할 수 있습니다.
- 하드웨어 평가: 앞서 언급했듯이, Lightning Grasp는 서로 다른 손 모델 간의 성능 차이를 드러내어 실제 손 설계 평가에도 활용할 수 있습니다. 연구자들은 새로운 손을 설계할 때 Lightning Grasp를 시뮬레이션 평가 도구로 활용하여 어떤 구조가 그립 성공률을 높이는지 데이터를 얻을 수 있습니다. 이는 예를 들어 인간의 손 구조를 모사하는 재현 로보틱스(design for dexterity)에 시사점을 줍니다.
종합하면, Lightning Grasp는 로봇 그립 계획에 있어 절차적 방법이 유효함을 입증한 전환점입니다. 고속의 알고리즘과 Contact Field 같은 새로운 개념은, 향후 연구들이 기존의 한계를 넘어 확장되는 데 기여할 것입니다. 로봇 그립 연구자들은 이 논문의 아이디어를 참고하여, 자신의 응용 분야에 맞게 고성능 접촉 계획과 탐색을 연구할 수 있을 것입니다.