📃XRoboToolkit 리뷰
🔍 Ping. 🔔 Ring. ⛏️ Dig. A tiered review series: quick look, key ideas, deep dive.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
XRoboToolkit은 Vision-Language-Action (VLA) 모델 학습을 위한 대규모, 고품질 로봇 시연 데이터셋의 긴급한 필요성을 해결하기 위해 개발된 크로스-플랫폼 Extended Reality (XR) 기반 로봇 원격 조작(teleoperation) 프레임워크입니다. 기존 원격 조작 방식의 제한된 확장성, 복잡한 설정, 그리고 불균일한 데이터 품질 문제를 극복하는 것을 목표로 합니다.
이 프레임워크는 OpenXR 표준을 채택하여 XR 장치(예: PICO 4 Ultra, Meta Quest 3)와 로봇 컨트롤러 간의 표준화된 데이터 형식 문제를 해결하는 일반화된 인터페이스 레이어를 제공합니다. 로봇 측면에서는 모듈화된 Python 및 C++ 인터페이스를 통해 다양한 로봇 플랫폼(정밀 매니퓰레이터, 모바일 로봇, 덱스터러스 핸드) 및 시뮬레이션 환경(MuJoCo)과의 원활한 통합을 가능하게 합니다.
핵심 방법론 및 기술적 세부 사항:
- 데이터 스트리밍 (Data Streaming):
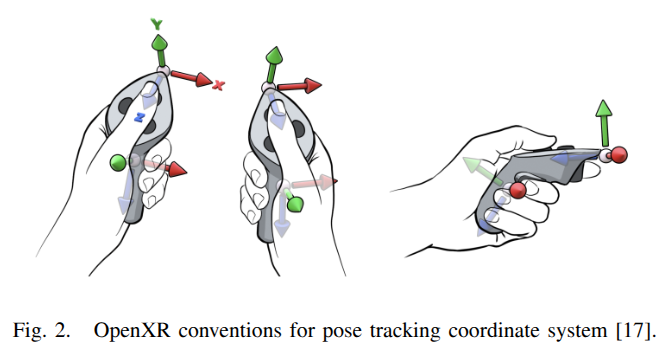
XRoboToolkit-PC-Service는 VR 하드웨어에서 클라이언트 애플리케이션으로 실시간 데이터를 스트리밍하기 위한 비동기식, 콜백 기반 아키텍처를 사용합니다.- XR 데이터 형식: OpenXR 컨벤션에 따라 모든 위치 및 회전 데이터는 X축이 오른쪽, Y축이 위, Z축이 뒤를 향하는 오른손 좌표계를 사용합니다. 원점은 애플리케이션 시작 시 사용자의 머리 위치에 설정됩니다. 6-자유도(DOF) 자세 데이터는
[x, y, z]의 3D 위치 벡터와 쿼터니언[qx, qy, qz, qw]로 구성된 7개의 부동 소수점 숫자로 포맷됩니다. - 모든 실시간 트래킹 데이터는 단일 JSON 객체로 90Hz로 전송됩니다. 이는 클라이언트 측 파싱을 단순화하고 활성화된 트래킹 기능에 관계없이 일관된 데이터 구조를 보장합니다.
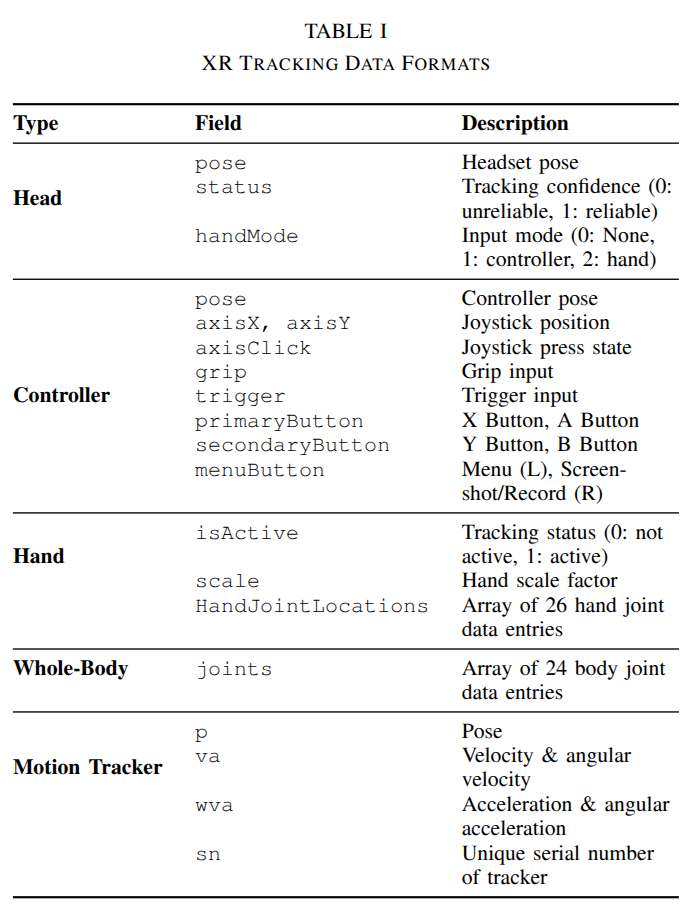
- 트래킹 모달리티 지원:
- Head Tracking: 헤드셋 자세, 트래킹 신뢰도, 입력 모드(컨트롤러, 손)를 포함합니다.
- Controller Tracking: 좌우 컨트롤러 자세와 버튼(primaryButton, secondaryButton, menuButton), 조이스틱(
axisX,axisY), 아날로그 제어(grip, trigger) 상태를 캡처합니다. - Hand Gesture Tracking: XR 헤드셋의 자체 손 트래킹 알고리즘을 통해 26개의 손 관절 자세(엄지 4개, 나머지 손가락당 5개, 손바닥 및 손목 관절)를 얻습니다. 각 관절은 6-DOF 자세와 트래킹 상태, 관절 반경을 포함합니다. 데이터는 90Hz로 전송되지만 카메라 한계로 인해 60Hz로 업데이트됩니다.
- Whole-Body Motion Capture: 24개의 주요 인체 모델 관절에 해당하는 키포인트 데이터를 포함하며, 각 항목은 관절 자세, 속도 및 가속도를 포함합니다.
- Motion Tracker: PICO 4 Ultra의 경우 보조 모션 트래커의 객체 트래킹 모드를 지원하며, 자세, 속도, 가속도, 시리얼 번호를 제공합니다.
- 로봇 제어 (Robot Control):
- XR 트래킹 상태를 로봇 명령으로 매핑하는 여러 제어 모드(IK, 덱스터러스 핸드 리타겟팅, 헤드 트래킹, 모바일 베이스 제어)를 포함합니다.
- 역기구학 (Inverse Kinematics, IK): 매니퓰레이터 제어를 위해 PlaCo [19] 기반의 QP(Quadratic Programming)-기반 IK 솔버를 구현합니다.
- QP 문제는 다음과 같이 정의됩니다: \min_{\dot{q}} \sum_{i=1}^{N} w_i \|J_i(q) \dot{q} + e_i(q)\|^2 \text{s.t.} \quad l \le C(q) \dot{q} \le u 여기서 q는 매니퓰레이터 구성, e_i(q)는 가중치 w_i를 가진 잔차 함수로 정의된 각 태스크 i, J_i(q)는 태스크 자코비안, C(q)는 추가 제약 조건 행렬입니다.
- 특이점(singularities) 근처에서 로봇 안정성을 향상시키기 위해 조작성(manipulability)을 최대화하는 정규화 항이 사용됩니다: m = \sqrt{\det(J(q)J(q)^\top)}
- XR 컨트롤러 사용 시, 사용자가 그립 버튼을 누를 때 말단 효과기(end-effector) 트래킹이 활성화되며, 컨트롤러의 상대적 움직임을 로봇의 말단 효과기에 매핑합니다.
- 보조 모션 트래커(예: 팔꿈치에 부착)는 추가적인 IK 제약 조건을 제공하여 로봇의 전신 자세를 미묘하게 제어하고, Null-space redundancy를 해결하며, 인간과 유사한 움직임을 달성합니다.
- 덱스터러스 핸드 리타겟팅 (Dexterous Hand Retargeting):
- OpenXR 손 트래킹 모델의 키포인트 위치를 로봇 핸드 관절 공간으로 매핑합니다.
- 이는 다음 최적화 문제를 통해 이루어집니다: \min_{q_t} \sum_{i=1}^{N} \left\|\alpha v_i^t - f_i(q_t)\right\|^2 + \beta \|q_t - q_{t-1}\|^2 \text{s.t.} \quad q_l \le q_t \le q_u 여기서 q_t는 시간 t에서의 로봇 핸드 관절 구성, v_i^t는 인간 손 모델의 i-번째 키포인트 위치, f_i(q_t)는 해당 로봇 핸드 위치를 계산하며, \alpha는 다른 손 크기에 대한 스케일링 인자, \beta는 부드러운 움직임을 위한 정규화 가중치입니다.
dex retargeting[12]을 사용하여 구현됩니다.
- 모바일 베이스 제어 (Mobile Base Control): 옴니디렉셔널 플랫폼을 가진 모바일 매니퓰레이터의 경우, XR 컨트롤러 조이스틱으로 모바일 베이스를 제어합니다.
- 스테레오 비전 피드백 (Stereoscopic Visual Feedback):
- PICO 4 Ultra 헤드셋의 온보드 카메라 또는 외부 ZED Mini 카메라를 통해 스테레오 비디오 스트리밍을 지원합니다.
- 사용자 지정 셰이더를 사용하여 동공 간 거리(interpupillary distance)를 조정하고 초점을 약 3.3피트에 설정하여 조작 작업에 적합한 3차원 깊이 인식을 제공합니다. PICO 4 Ultra는 ZED Mini에 비해 우수한 시각적 품질과 균형 잡힌 시야(FOV)를 제공합니다.
적용 및 시연:
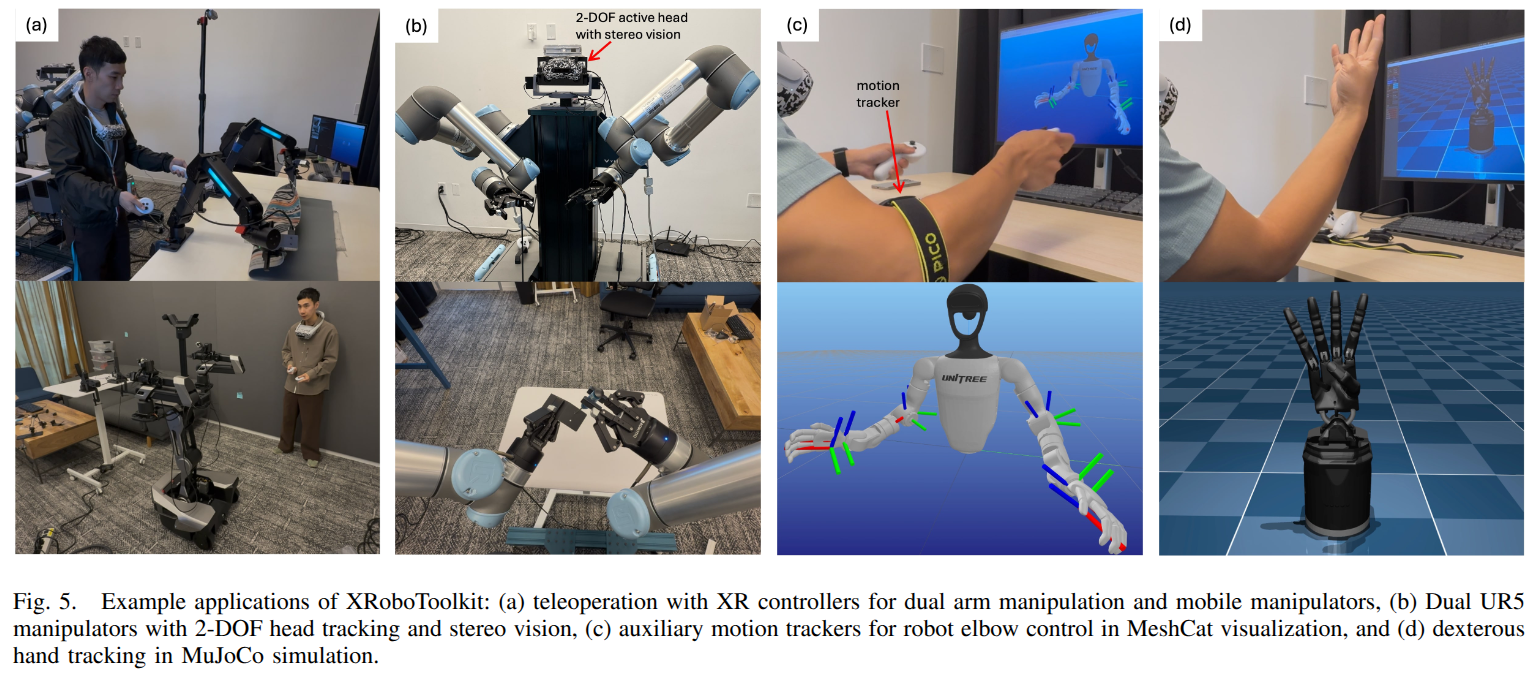
XRoboToolkit은 듀얼 UR5 및 ARX R5 매니퓰레이터, Galaxea R1-Lite 모바일 매니퓰레이터, Shadow 덱스터러스 핸드와 같은 다양한 로봇 플랫폼과 MuJoCo 시뮬레이션 환경에서 검증되었습니다.
- XR 컨트롤러 기반 원격 조작: 듀얼 암 매니퓰레이터 및 모바일 매니퓰레이터 제어에 사용됩니다.
- 정밀 조작과 액티브 스테레오 비전: 2-DOF 액티브 헤드(yaw, pitch)와 스테레오 비전을 갖춘 듀얼 UR5 설정에서 3mm 드라이버를 4mm 구멍에 삽입하는 고정밀 작업(0.5mm 공차)에 성공했습니다.
- redundant 매니퓰레이터 제어를 위한 모션 트래커: Unitree G1 상체 모델에 보조 모션 트래커를 사용하여 7-DOF 로봇 팔꿈치 제어에 활용되며, 인간의 자연스러운 팔 구성을 모방하는 데 도움이 됩니다.
- MuJoCo에서의 덱스터러스 핸드 제어: 헤드셋의 손 트래킹 모드를 사용하여 MuJoCo 시뮬레이션에서 Shadow Hand의 키네마틱 구조로 매핑하여 미세 조작 작업을 수행합니다.
성능 평가:
- 비디오 스트리밍 지연 시간 비교: Open-TeleVision과 비교하여 XRoboToolkit은 ZED Mini - PICO 4 Ultra 구성에서 82.00ms의 가장 낮은 평균 지연 시간을 달성했습니다. ZED Mini - Quest 3 구성에서는 Open-TeleVision(121.50ms)보다 27ms(22%) 향상된 94.50ms를 기록했습니다. PICO 4 Ultra - PICO 4 Ultra 구성은 3.12ms로 가장 낮은 가변성을 보였습니다.
- VLA 미세 조정 데이터 수집: XRoboToolkit을 사용하여 ARX R5 듀얼 암 시스템으로 양팔 카펫 접기(bimanual carpet folding) 작업을 100회 시연하여 고품질 데이터를 수집했습니다. 이 데이터로 \pi^0 모델 [3]을 미세 조정하여 100%의 성공률과 자율적인 리그래스핑 및 재배치 동작을 보이는 강력한 정책을 달성했습니다.
결론:
XRoboToolkit은 낮은 지연 시간의 스테레오 피드백, 최적화 기반 제어 및 모듈식 아키텍처를 통해 기존 시스템의 한계를 극복하는 XR 기반 로봇 원격 조작을 위한 크로스 플랫폼 프레임워크입니다. 이 프레임워크는 다양한 로봇 플랫폼에서 그 다용성을 입증했으며, 정밀 조작 작업과 VLA 모델 훈련을 통해 그 효과를 검증했습니다.
향후 연구:
- 저작동(underactuated) 시스템을 위한 손 리타겟팅 알고리즘 개선.
- Roboverse [23]와 같은 플랫폼을 통해 시뮬레이션 지원 확대.
- 검증된 전신 모션 리타겟팅 [24]을 통한 휴머노이드 원격 조작 기능 개발.
- OpenXR 표준화 노력에 기여하여 더욱 일관된 크로스 플랫폼 호환성 확보.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
1. 서론: VLA 시대의 데이터 수집 패러다임 변화
1.1 연구 배경과 동기
Vision-Language-Action(VLA) 모델의 급격한 발전은 로봇 공학 분야에 새로운 패러다임을 제시하고 있습니다. Physical Intelligence의 π₀, Google DeepMind의 RT-2, OpenVLA 등 대규모 기반 모델들이 등장하면서, 로봇이 자연어 지시를 이해하고 복잡한 조작 작업을 수행하는 것이 점점 현실화되고 있습니다. 그러나 이러한 모델들의 성능은 결국 학습에 사용되는 시연 데이터의 품질과 규모에 크게 의존합니다.
현재 로봇 시연 데이터 수집의 주류 방법은 텔레오퍼레이션(Teleoperation)입니다. 인간 조작자가 로봇을 원격으로 제어하여 작업을 수행하고, 이 과정에서 생성되는 상태-행동 쌍을 데이터로 저장하는 방식입니다. 그러나 기존의 텔레오퍼레이션 시스템들은 다음과 같은 근본적인 한계를 가지고 있습니다:
확장성의 한계: ALOHA, GELLO 같은 리더-팔로워(Leader-Follower) 시스템은 정밀한 제어를 제공하지만, 특정 로봇 하드웨어에 종속되어 있어 다양한 플랫폼으로의 확장이 어렵습니다. ALOHA 듀얼 암 시스템의 경우 $50,000 이상의 비용이 들며, GELLO조차도 단일 암당 $270 이상의 BOM 비용이 필요합니다.
복잡한 설정 절차: 기존 VR/XR 텔레오퍼레이션 솔루션들은 Unity SDK나 WebXR 플랫폼에 의존하여 추가적인 지연 시간과 호환성 문제를 야기합니다. 또한 XR 장치와 로봇 컨트롤러 간의 표준화된 데이터 포맷이 부재하여, 새로운 장치나 로봇 플랫폼을 통합할 때마다 상당한 엔지니어링 작업이 필요합니다.
데이터 품질 문제: 비전 기반 텔레오퍼레이션 시스템(DexCap, UMI, AnyTeleop 등)은 사용이 편리하지만, 운동학적 특이점(kinematic singularity) 문제, 로봇 작업 공간 초과, 정밀도 부족 등의 문제로 인해 수집된 데이터의 품질이 저하될 수 있습니다.
1.2 XRoboToolkit의 핵심 기여
XRoboToolkit은 이러한 문제들을 해결하기 위해 OpenXR 표준을 기반으로 한 크로스 플랫폼 텔레오퍼레이션 프레임워크를 제안합니다. 이 프레임워크의 주요 기여는 다음과 같습니다:
- OpenXR 기반 표준화: 업계 표준인 OpenXR을 채택하여 다양한 XR 헤드셋(PICO 4 Ultra, Meta Quest 3 등)에서 동작하는 크로스 플랫폼 호환성을 확보했습니다.
- 저지연 스테레오스코픽 비전: 최적화된 비디오 스트리밍 파이프라인을 통해 저지연 양안 시각 피드백을 제공하여 모션 시크니스를 최소화하고 직관적인 조작 경험을 제공합니다.
- 최적화 기반 역운동학(IK) 솔버: Quadratic Programming(QP) 기반의 IK 솔버를 통해 특이점 근처에서도 부드럽고 안정적인 로봇 모션을 생성합니다.
- 다양한 트래킹 모달리티 지원: 헤드, 컨트롤러, 핸드, 보조 모션 트래커 등 다양한 트래킹 방식을 통합 지원합니다.
- 모듈러 아키텍처: UR5, ARX R5, Galaxea R1-Lite 등 다양한 로봇 플랫폼과 MuJoCo 같은 시뮬레이션 환경에 쉽게 통합될 수 있는 모듈러 설계를 채택했습니다.
2. 시스템 아키텍처 상세 분석
2.1 전체 시스템 개요
XRoboToolkit의 아키텍처는 크게 XR 측(클라이언트)과 로봇 측(서버)으로 구분됩니다. 이 두 측면은 네트워크를 통해 실시간으로 통신하며, 각각 고유한 역할을 수행합니다.
XR 측 컴포넌트:
- XRoboToolkit-Unity-Client: XR 헤드셋에 배포되는 Unity 애플리케이션으로, 포즈 트래킹 데이터 캡처와 스테레오스코픽 시각 인터페이스를 담당합니다.
- 포즈 트래킹 데이터: 헤드, 핸드, 컨트롤러, 전신, 오브젝트 트래킹(모션 트래커를 통한) 데이터를 수집합니다.
로봇 측 컴포넌트:
- XRoboToolkit-PC-Service: C++로 구현된 PC 서비스로, XR 헤드셋으로부터 포즈 트래킹 데이터를 수신합니다.
- XRoboToolkit-PC-Service-Pybind: Python에서 XR 트래킹 데이터에 직접 접근할 수 있게 해주는 바인딩 레이어입니다.
- XRoboToolkit-Robot-Vision: PICO 헤드셋의 온보드 카메라 또는 외부 ZED Mini 카메라를 통한 스테레오 비전 모듈입니다.
- XRoboToolkit-Teleop-Sample-Python: IK 및 덱스터러스 리타겟팅 솔버가 구현된 텔레오퍼레이션 모듈입니다.
2.2 OpenXR 데이터 포맷과 좌표계
XRoboToolkit은 OpenXR 컨벤션을 따라 모든 위치 및 회전 데이터를 우수 좌표계(right-handed coordinate system)로 표현합니다. 좌표축은 X축이 오른쪽, Y축이 위쪽, Z축이 뒤쪽을 향합니다.
6-DOF 포즈 데이터 포맷:
- 7개의 부동소수점 숫자로 구성: 3D 위치 벡터(x, y, z) + 회전 쿼터니언(qx, qy, qz, qw)
- 콤마로 구분된 문자열 형태로 전송
원점 설정:
- 애플리케이션 시작 시 사용자의 헤드 위치가 원점으로 설정됩니다.
- 이를 통해 사용자의 상대적 움직임이 로봇 제어에 직관적으로 매핑됩니다.
2.3 XRoboToolkit-PC-Service의 비동기 아키텍처
PC 서비스는 VR 하드웨어로부터 클라이언트 애플리케이션으로의 실시간 데이터 스트리밍을 위해 비동기, 콜백 기반 아키텍처를 채택했습니다. 이러한 설계 선택의 이점은 다음과 같습니다:
- 논블로킹 I/O: 데이터 수신과 처리가 독립적으로 수행되어 시스템 응답성이 향상됩니다.
- 이벤트 기반 처리: 새로운 데이터가 도착할 때마다 콜백이 호출되어 즉각적인 처리가 가능합니다.
- 리소스 효율성: 폴링 방식 대비 CPU 사용률을 낮추면서도 저지연 성능을 유지합니다.
3. 핵심 기술 요소 심층 분석
3.1 스테레오스코픽 비주얼 피드백 시스템
텔레오퍼레이션에서 시각 피드백의 품질은 조작자의 상황 인식과 작업 수행 능력에 직접적인 영향을 미칩니다. XRoboToolkit은 두 가지 스테레오 비전 옵션을 제공합니다:
PICO 4 Ultra 온보드 카메라:
- 수평 FOV: 약 76.35°, 수직 FOV: 약 61.05°
- 균형 잡힌 시야각으로 텔레오퍼레이션 작업에 최적화
- 우수한 톤 재현, 밝기, 색상 정확도, 다이나믹 레인지
ZED Mini 외부 카메라:
- 수평 FOV: 82°, 수직 FOV: 52°
- 더 넓은 수평 시야각 제공
- 원거리 깊이 정확도에서 일부 트레이드오프
연구팀의 경험적 관찰에 따르면, PICO 4 Ultra가 전반적인 시각 품질 측면에서 ZED Mini보다 우수한 성능을 보였습니다. 특히 텔레오퍼레이션 작업에 최적이라고 판단되는 거리에서 향상된 3차원 깊이 인식을 제공합니다.
저지연 통신 프로토콜:
- 고효율 비디오 스트리밍 파이프라인 최적화
- 모션 시크니스 최소화를 위한 지연 시간 감소
- 네트워크 조건에 적응하는 동적 품질 조절
3.2 최적화 기반 역운동학(Inverse Kinematics) 솔버
로봇 텔레오퍼레이션에서 IK 솔버는 인간 조작자의 end-effector 포즈를 로봇의 관절 명령으로 변환하는 핵심 역할을 합니다. XRoboToolkit은 Quadratic Programming(QP) 기반의 IK 솔버를 채택하여 기존 방식의 한계를 극복합니다.
기존 IK 방식의 문제점:
- 해석적(Analytical) IK: 빠르지만 특정 로봇 기구학에만 적용 가능하며, 특이점 처리가 어렵습니다.
- 수치적(Numerical) IK (Jacobian 기반):
- 특이점 근처에서 Jacobian 행렬의 조건수(condition number)가 급격히 증가
- 관절 속도/토크가 급등하여 불안정한 움직임 발생
- 고정된 널스페이스(nullspace) 할당으로 인한 유연성 부족
QP 기반 IK의 장점:
QP 기반 IK 솔버는 다음과 같은 최적화 문제로 정식화됩니다:
minimize ||J·Δq - Δx||² + λ||Δq||²
subject to q_min ≤ q + Δq ≤ q_max
|Δq| ≤ Δq_max- J: Jacobian 행렬
- Δq: 관절 속도
- Δx: end-effector 속도
- λ: 정규화 계수
- q_min, q_max: 관절 한계
- Δq_max: 관절 속도 한계
이 정식화의 이점:
- 특이점 회피: 정규화 항(||Δq||²)이 특이점 근처에서 관절 속도 폭주를 방지합니다.
- 제약 조건 만족: 관절 한계, 속도 한계, 심지어 자기 충돌 회피까지 부등식 제약으로 자연스럽게 포함할 수 있습니다.
- 부드러운 모션: 최소 노름 솔루션을 찾으므로 움직임이 부드럽고 예측 가능합니다.
- 여유 자유도 활용: 7-DOF 이상의 여유 자유도를 가진 로봇의 경우, 널스페이스 최적화를 통해 부가 목표(예: 조작성 최대화, 관절 중앙값 유지)를 추구할 수 있습니다.
엘보우 트래킹을 통한 여유 자유도 제어:
XRoboToolkit은 7-DOF 암의 경우 보조 모션 트래커를 조작자의 팔꿈치에 부착하여 추가적인 IK 제약으로 활용합니다. 이를 통해:
- 운동학적 여유도를 인체 공학적 방식으로 해결
- 조작자가 더 자연스러운 암 구성을 유지하면서 end-effector 트래킹 수행
- 직관적인 제어 경험 제공
3.3 덱스터러스 핸드 리타겟팅
정밀 조작 작업을 위해 XRoboToolkit은 인간 손 동작을 로봇 핸드로 리타겟팅하는 기능을 제공합니다. 이 과정에서 OpenXR의 26-관절 핸드 모델을 Shadow Hand와 같은 로봇 핸드의 운동학적 구조로 매핑합니다.
OpenXR 핸드 모델 (26 관절):
- 손목(Wrist): 1 관절
- 손바닥(Palm): 연결 구조
- 각 손가락(Thumb, Index, Middle, Ring, Pinky): 5개 × 5 관절 = 25 관절
리타겟팅 알고리즘:
핸드 리타겟팅은 일반적으로 다음 단계를 거칩니다:
- 손가락 끝 위치 추출: OpenXR에서 각 손가락 끝(Tip)의 3D 위치를 추출
- 손목 기준 정규화: 손목 좌표계 기준으로 상대 위치 계산
- 스케일 조정: 인간 손과 로봇 핸드의 크기 차이 보정
- 역운동학 해결: 로봇 핸드의 각 손가락에 대해 IK를 풀어 관절 각도 계산
- 관절 한계 클리핑: 로봇 핸드의 물리적 한계 내로 관절 각도 제한
한계점: 논문에서 명시적으로 언급된 한계로, 현재 핸드 리타겟팅 프레임워크는 각 관절이 개별적으로 제어 가능하다고 가정합니다. 따라서 INSPIRE Hands와 같이 관절 움직임이 기계적으로 결합된(coupled) 로봇 핸드에는 정확한 리타겟팅이 어렵습니다.
4. 지원 플랫폼 및 응용 시나리오
4.1 지원 로봇 플랫폼
XRoboToolkit의 모듈러 아키텍처는 다양한 로봇 플랫폼과의 통합을 용이하게 합니다:
정밀 매니퓰레이터:
- UR5: Universal Robots의 6-DOF 협동 로봇. 산업 표준으로 널리 사용됨.
- ARX R5: 듀얼 암 구성이 가능한 경량 매니퓰레이터.
모바일 매니퓰레이터:
- Galaxea R1-Lite: 이동 기반과 결합된 조작 플랫폼으로, 확장된 작업 공간 제공.
덱스터러스 핸드:
- Shadow Dexterous Hand: 24-DOF의 인간과 유사한 로봇 핸드로, 정밀 조작 작업에 적합.
시뮬레이션 환경:
- MuJoCo: 물리 기반 시뮬레이션 환경으로, 정책 학습 및 평가에 활용.
- MeshCat: 시각화 도구로, 실시간 로봇 상태 모니터링에 사용.
4.2 응용 시나리오
논문에서 제시된 주요 응용 시나리오는 다음과 같습니다:
시나리오 (a): 듀얼 암 조작 및 모바일 매니퓰레이션
- XR 컨트롤러를 사용한 양팔 동시 제어
- 모바일 매니퓰레이터의 이동과 조작 통합
시나리오 (b): 2-DOF 헤드 트래킹과 스테레오 비전
- 듀얼 UR5 매니퓰레이터 설정
- 조작자의 머리 움직임에 따른 카메라 시점 조절
- 몰입형 원격 조작 경험
시나리오 (c): 보조 모션 트래커를 통한 엘보우 제어
- 7-DOF 암의 여유 자유도 제어
- MeshCat을 통한 실시간 시각화
- 인체 공학적 암 구성 유지
시나리오 (d): MuJoCo 시뮬레이션에서의 덱스터러스 핸드 트래킹
- 헤드셋의 핸드 트래킹 모드 활용
- 손가락 및 손 제스처 직접 캡처
- Shadow Hand로의 리타겟팅
5. VLA 모델 학습을 통한 데이터 품질 검증
5.1 실험 설정
XRoboToolkit의 데이터 수집 파이프라인이 VLA 학습에 적합한 고품질 시연 데이터를 생성할 수 있는지 검증하기 위해, 연구팀은 양팔 카펫 접기 작업(bimanual carpet folding task)에 대한 실험을 수행했습니다.
하드웨어 구성:
- 로봇: ARX R5 듀얼 암 시스템
- 손목 카메라: Intel RealSense D405i × 2
- 오버헤드 카메라: Intel RealSense D435i × 1
작업 시퀀스:
- 카펫을 짧은 가장자리를 따라 반으로 접기
- 긴 가장자리를 따라 다시 한 번 접기
- 오른쪽 팔로 카펫을 옆으로 당기기
데이터 수집 세부사항:
- 총 시연 수: 100개
- 기록 주파수: 50 FPS
- 프레임 당 데이터:
- 14차원 로봇 관절 상태 (양팔 각 7-DOF)
- 14차원 위치 제어 명령
- 424×240 RGB 이미지 (3개 카메라)
- 평균 작업 완료 시간: 20초
- 관찰된 행동: 재파지(regrasping), 재배치(repositioning) 등
5.2 VLA 학습 및 결과
수집된 데이터셋으로 π₀ 모델에 대한 Low-Rank Adaptation(LoRA) 파인튜닝을 수행했습니다.
학습 파라미터:
- 학습 스텝: 80,000
- 배치 크기: 16
- 액션 호라이즌: 50 프레임
결과:
- 30분 연속 운영 동안 100% 성공률 달성
- 평균 작업 완료 시간: 30초 (텔레오퍼레이션 대비 약 50% 증가)
관찰된 적응적 행동:
학습된 정책은 다음과 같은 적응적 행동을 보였습니다:
- 자율적 재파지: 그리퍼가 카펫을 확실히 잡지 못했을 때 스스로 다시 잡기 시도
- 지능적 재배치: 카펫이 중앙에서 벗어났을 때 위치 조정
이러한 결과는 XRoboToolkit으로 수집된 데이터가 단순한 모방을 넘어 일반화 능력을 갖춘 정책 학습에 충분한 품질을 갖추고 있음을 시사합니다.
6. 기존 텔레오퍼레이션 시스템과의 비교 분석
6.1 리더-팔로워 시스템과의 비교
ALOHA / ALOHA 2:
- 장점: 직접적인 관절 매핑으로 정밀한 제어, 특이점 문제 회피
- 단점: 높은 비용($50,000+), 특정 하드웨어에 종속, 확장성 제한
GELLO:
- 장점: 3D 프린팅 가능, 다양한 로봇 구성 지원
- 단점: Dynamixel 모터 비용($270+/arm), 설정 복잡성
U-ARM:
- 장점: 초저가($50-57), 빠른 적응성
- 단점: 중력 보상 부재, 정밀도 제한
XRoboToolkit의 차별점:
- XR 헤드셋만으로 텔레오퍼레이션 가능 (추가 하드웨어 최소화)
- 크로스 플랫폼 호환성
- 스테레오스코픽 피드백으로 향상된 상황 인식
- 핸드 트래킹으로 덱스터러스 조작 지원
6.2 VR 기반 시스템과의 비교
Open-TeleVision:
- 장점: 스테레오스코픽 피드백, 원격 텔레오퍼레이션 (대륙 간 가능)
- 단점: 특정 하드웨어 설정 필요, 통합 복잡성
AV-ALOHA (Active Vision ALOHA):
- 장점: 능동적 시각 시스템, 6개 카메라 통합
- 단점: ALOHA 하드웨어 의존성
XRoboToolkit의 차별점:
- OpenXR 표준 기반으로 다양한 XR 헤드셋 지원
- 모듈러 아키텍처로 쉬운 플랫폼 통합
- QP 기반 IK로 안정적인 모션 생성
6.3 엑소스켈레톤 시스템과의 비교
ACE (Cross-platform Visual-Exoskeletons):
- 장점: VisionPro 없이 텔레오퍼레이션 가능, 장시간 작업에 적합
- 단점: 물리적 착용 필요, 설정 시간
AirExo, HOMIE:
- 장점: 착용형 인터페이스, 직관적 제어
- 단점: 하드웨어 복잡성, 비용
XRoboToolkit의 차별점:
- 소비자용 XR 헤드셋 활용으로 접근성 향상
- 물리적 착용 장비 최소화
- 원격 텔레오퍼레이션 용이
6.4 비전 기반 시스템과의 비교
DexCap, UMI:
- 장점: 사용 편의성, 저비용
- 단점: 특이점 문제, 정밀도 부족, 후처리 필요
ARCap:
- 장점: AR 인터페이스, 충돌 회피
- 단점: 특정 설정 요구
XRoboToolkit의 차별점:
- QP 기반 IK로 특이점 문제 완화
- 실시간 스테레오 피드백으로 정밀 작업 지원
- 표준화된 데이터 포맷
7. 기술적 고찰 및 심층 분석
7.1 OpenXR 표준 채택의 의의
OpenXR은 Khronos Group에서 관리하는 개방형 XR 표준으로, XR 애플리케이션과 런타임 간의 인터페이스를 정의합니다. XRoboToolkit이 OpenXR을 채택한 것은 다음과 같은 전략적 의미를 가집니다:
크로스 플랫폼 호환성:
- 단일 코드베이스로 PICO, Meta Quest, Valve Index 등 다양한 헤드셋 지원 가능
- 향후 출시될 새로운 XR 장치에도 최소한의 수정으로 대응 가능
표준화된 데이터 포맷:
- 일관된 좌표계 및 데이터 구조
- 플랫폼 간 데이터 호환성
- 통합 작업 간소화
에코시스템 접근:
- 기존 OpenXR 확장 기능 활용 가능
- 커뮤니티 지원 및 지속적인 개선
한계:
- 현재 전신 트래킹은 PICO의 24-관절 모델에 의존
- OpenXR에 표준화된 전신 정의가 부재하여 다른 XR 브랜드와의 호환성 문제 가능성
7.2 QP 기반 IK의 이론적 배경
Quadratic Programming을 IK에 적용하는 것은 로봇 제어 분야에서 활발히 연구되어 온 주제입니다. 이 접근법의 이론적 기반을 살펴보겠습니다.
일반적인 QP 문제 정식화:
minimize (1/2)x'Hx + f'x
subject to Ax ≤ b
Aeq·x = beqIK에의 적용:
기본 IK 목표(end-effector 추종)와 부가 목표(관절 한계, 특이점 회피 등)를 결합:
H = J'J + λI
f = -J'Δx + λ(q - q_ref)여기서 q_ref는 선호하는 관절 구성(예: 관절 중앙값)
특이점 근처의 행동:
특이점에서 Jacobian J의 행렬식이 0에 가까워지면:
- J’J의 조건수가 급격히 증가
- 순수 Jacobian 기반 방법은 ||Δq|| → ∞
QP의 정규화 항 λI가 이를 방지:
- 큰 ||Δq||에 페널티를 부과
- 특이점 근처에서 추종 정확도를 희생하고 안정성 확보
- λ 조절로 정확도-안정성 트레이드오프 제어
7.3 핸드 리타겟팅의 기술적 과제
인간 손에서 로봇 핸드로의 리타겟팅은 다음과 같은 기술적 과제를 수반합니다:
운동학적 차이:
- 인간 손: 27 뼈, 29 관절, 복잡한 근육-건 시스템
- 로봇 핸드: 다양한 구조 (Shadow Hand 24-DOF, Allegro Hand 16-DOF 등)
- 관절 배치, 움직임 범위, 자유도가 상이
스케일 불일치:
- 인간 손과 로봇 핸드의 크기 차이
- 단순 스케일링은 물리적으로 불가능한 포즈 생성 가능
커플링된 관절:
- 일부 로봇 핸드(INSPIRE Hands 등)는 기계적으로 결합된 관절 보유
- 각 관절 독립 제어 가정의 리타겟팅 알고리즘 적용 불가
실시간 제약:
- 텔레오퍼레이션의 실시간 요구사항 충족 필요
- 복잡한 최적화는 지연 시간 증가
XRoboToolkit의 접근법:
- OpenXR 26-관절 모델을 기반으로 한 표준화된 입력
- 타겟 로봇 핸드에 맞춤화된 리타겟팅 모듈
- 현재는 독립 관절 제어 로봇에 최적화
7.4 데이터 품질과 VLA 성능의 관계
논문의 실험 결과는 XRoboToolkit으로 수집된 데이터가 VLA 학습에 효과적임을 보여줍니다. 이 결과를 데이터 품질 관점에서 분석해 보겠습니다.
높은 프레임 레이트 (50 FPS):
- 연속적이고 부드러운 궤적 캡처
- 급격한 움직임 변화도 정확히 기록
- Flow Matching 기반 VLA(π₀)의 연속 액션 생성에 적합
다중 카메라 구성:
- 손목 카메라 2개 + 오버헤드 카메라 1개
- 다양한 시점의 시각 정보 제공
- 가림(occlusion) 문제 완화
관절 상태 + 제어 명령 동시 기록:
- 14차원 관절 상태: 실제 로봇 상태
- 14차원 위치 제어 명령: 의도된 행동
- 두 정보의 차이에서 로봇 역학 학습 가능
자연스러운 인간 행동 캡처:
- 재파지, 재배치 등 적응적 행동 포함
- 다양한 전략을 학습 데이터에 포함
- 정책의 일반화 능력 향상
100% 성공률의 의미:
- 100개 시연만으로도 robust한 정책 학습 가능
- 데이터 효율성 높음
- 적응적 행동 자발적 발현 = 진정한 일반화
8. 한계점 및 향후 연구 방향
8.1 현재 시스템의 한계
논문에서 명시적으로 인정한 한계점들을 분석합니다:
1. 전신 트래킹의 플랫폼 의존성
현재 XRoboToolkit의 전신 트래킹은 PICO의 24-관절 모델에 의존합니다. OpenXR에 표준화된 전신 트래킹 정의가 부재하기 때문에, 다른 XR 브랜드(Meta, Valve 등)의 헤드셋과 호환성 문제가 발생할 수 있습니다.
영향:
- 크로스 플랫폼 전신 텔레오퍼레이션 제한
- 휴머노이드 로봇 제어에 어려움
잠재적 해결책:
- 통합 전신 스켈레톤 모델 정의
- 다양한 플랫폼 간 매핑 레이어 개발
- OpenXR 표준에 전신 확장 제안
2. 휴머노이드 전신 텔레오퍼레이션 미검증
전신 트래킹 데이터는 제공되지만, 실제 휴머노이드 로봇으로의 리타겟팅을 통한 전신 텔레오퍼레이션은 아직 검증되지 않았습니다.
영향:
- 휴머노이드 로봇 응용 제한
- TWIST, SONIC 같은 최신 휴머노이드 텔레오퍼레이션 연구와의 통합 미확인
잠재적 해결책:
- Unitree H1, Fourier Intelligence GR-1 등과의 통합 검증
- 전신 리타겟팅 알고리즘 개발 및 공개
3. 커플링된 관절을 가진 로봇 핸드 지원 불가
현재 핸드 리타겟팅 프레임워크는 각 관절이 독립적으로 제어 가능하다고 가정합니다. INSPIRE Hands와 같이 기계적으로 관절이 결합된 로봇 핸드에는 정확한 리타겟팅이 어렵습니다.
영향:
- 지원 가능한 로봇 핸드 종류 제한
- 저비용 로봇 핸드(주로 커플링된 설계) 활용 어려움
잠재적 해결책:
- 커플링 제약을 고려한 최적화 기반 리타겟팅
- 로봇 핸드별 맞춤 리타겟팅 모듈
8.2 추가적인 한계 및 개선 방향
논문에서 명시적으로 언급하지 않았지만 고려해야 할 추가적인 한계점들:
1. 네트워크 지연 및 안정성
원격 텔레오퍼레이션 시나리오(예: Open-TeleVision의 대륙 간 제어)에 대한 성능 평가가 부족합니다.
개선 방향:
- 네트워크 지연 보상 알고리즘 도입
- 예측 제어(Predictive Control) 통합
- 지연 상황에서의 안전 동작 정의
2. 햅틱 피드백 부재
현재 시스템은 시각 피드백에만 의존하며, 촉각/힘 피드백을 제공하지 않습니다.
개선 방향:
- XR 컨트롤러의 햅틱 기능 활용
- 힘 센서 데이터의 햅틱 변환
- 가상 햅틱 렌더링
3. 학습 곡선 및 사용자 연구
조작자의 숙련도에 따른 데이터 품질 변화에 대한 체계적 분석이 부족합니다.
개선 방향:
- 초보자/숙련자 간 비교 연구
- 인체공학적 최적화
- 훈련 프로토콜 개발
4. 대규모 데이터 수집 인프라
100개 시연으로 검증했지만, VLA의 진정한 잠재력을 위해서는 수천~수만 개 시연이 필요합니다.
개선 방향:
- 분산 데이터 수집 시스템
- 클라우드 기반 데이터 관리
- 품질 자동 검증 시스템
8.3 향후 연구 방향 제안
XRoboToolkit의 발전과 로봇 학습 생태계 확장을 위한 향후 연구 방향을 제안합니다:
1. 휴머노이드 로봇 통합
최근 휴머노이드 로봇(Unitree H1, Tesla Optimus, Figure 등)의 급격한 발전에 맞춰, XRoboToolkit의 전신 텔레오퍼레이션 기능을 휴머노이드 플랫폼으로 확장하는 것이 중요합니다.
2. 멀티모달 피드백 시스템
시각 외에 청각(로봇 소리), 촉각(힘/접촉 정보), 고유수용감각(proprioception) 피드백을 통합하여 더욱 몰입감 있고 정밀한 텔레오퍼레이션 경험을 제공할 수 있습니다.
3. AI 어시스턴트 통합
텔레오퍼레이션 중 AI 어시스턴트가 조작자를 보조하는 Shared Autonomy 접근법을 통합하면:
- 조작자 피로 감소
- 데이터 수집 효율 향상
- 일관된 데이터 품질 유지
4. 표준화된 데이터 포맷 및 벤치마크
로봇 학습 커뮤니티의 Open X-Embodiment, DROID 같은 노력과 연계하여:
- 표준 데이터 포맷 정의
- 벤치마크 태스크 설정
- 데이터 공유 인프라 구축
5. 시뮬레이션-실제 통합
XRoboToolkit의 MuJoCo 지원을 확장하여:
- 시뮬레이션에서의 사전 훈련
- Sim-to-Real 전이 파이프라인
- 안전한 정책 검증
9. 실무적 고려사항
9.1 시스템 구축 가이드
XRoboToolkit을 실제로 구축하고자 하는 연구자/개발자를 위한 실무적 가이드입니다.
최소 요구사항:
XR 측:
- PICO 4 Ultra 헤드셋 (User OS 5.12 이상)
- 엔터프라이즈 버전 특별 권한 (VST 카메라 접근용)
PC 측:
- Ubuntu 22.04 (Linux x86)
- 충분한 USB 3.0 포트 (로봇 연결용)
- 네트워크 연결 (헤드셋과 통신)
설치 단계:
PC 서비스 설치:
헤드셋 앱 설치:
Python 텔레오퍼레이션 샘플 실행:
트러블슈팅 팁:
- 헤드셋 연결 실패: 같은 네트워크 확인, 방화벽 설정 검토
- 지연 시간 증가: 네트워크 대역폭 확인, 다른 트래픽 최소화
- IK 실패: 로봇 모델 파라미터 확인, 초기 자세 조정
9.2 데이터 수집 베스트 프랙티스
고품질 시연 데이터 수집을 위한 권장 사항:
환경 설정:
- 일관된 조명 조건 유지
- 배경 클러터 최소화
- 명확한 작업 공간 정의
조작자 훈련:
- 시스템 숙지 시간 확보 (최소 30분 권장)
- 쉬운 작업부터 시작하여 점진적 난이도 증가
- 정기적 휴식으로 피로 방지
데이터 다양성:
- 다양한 초기 조건에서 시연 수집
- 의도적으로 다양한 전략 사용
- 실패 복구 행동 포함
품질 검증:
- 수집 즉시 데이터 확인
- 불량 시연 제거/재수집
- 통계적 분포 확인
9.3 VLA 학습 파이프라인 통합
XRoboToolkit 데이터를 VLA 학습에 활용하기 위한 가이드:
데이터 포맷 변환:
- HDF5 또는 TFRecord 형식으로 변환
- LeRobot, Open X-Embodiment 포맷 호환성 확보
전처리:
- 이미지 크기 조정 (VLA 모델 요구사항에 맞춤)
- 정규화 적용
- 데이터 증강 (선택적)
학습 설정:
- π₀ LoRA 파인튜닝: batch_size=16, steps=80,000
- OpenVLA: 표준 설정 활용
- RT-X: 데이터 혼합 전략 고려
10. 관련 연구 및 생태계
10.1 텔레오퍼레이션 프레임워크 비교표
| 시스템 | 제어 방식 | XR 지원 | 비용 | 플랫폼 호환성 | 특징 |
|---|---|---|---|---|---|
| XRoboToolkit | End-effector + QP IK | ✓ (OpenXR) | 중 | 높음 | 크로스 플랫폼, 스테레오 비전 |
| ALOHA | Joint Mapping | ✗ | 고 ($50k+) | 낮음 | 정밀 제어, 듀얼 암 |
| GELLO | Joint Mapping | ✗ | 중 ($270+/arm) | 중 | 3D 프린팅, 다양한 구성 |
| Open-TeleVision | End-effector + IK | ✓ (VisionPro) | 고 | 중 | 몰입형, 원격 제어 |
| ACE | End-effector + IK | ✓ (VisionPro) | 고 | 중 | 엑소스켈레톤, 햅틱 |
| U-ARM | Joint Mapping | ✗ | 저 ($50-57) | 높음 | 초저가, 빠른 적응 |
10.2 VLA 모델 생태계
XRoboToolkit으로 수집된 데이터는 다음 VLA 모델들과 호환될 수 있습니다:
π₀ (Physical Intelligence):
- Flow Matching 기반 연속 액션 생성
- 50Hz 제어 주파수
- 3B 파라미터 VLM 백본
OpenVLA:
- 오픈소스 VLA
- Llama 2 기반
- 다양한 로봇 데이터 학습
RT-2 (Google DeepMind):
- PaLM-E 백본
- 언어-비전-액션 통합
- 제로샷 일반화
Octo:
- 트랜스포머 기반
- 다중 로봇 데이터 학습
- 효율적 파인튜닝
10.3 데이터 표준화 노력
XRoboToolkit의 데이터는 다음 표준과의 호환을 고려해야 합니다:
Open X-Embodiment:
- Google DeepMind 주도
- 다양한 로봇 데이터 통합
- 표준 데이터 포맷 정의
DROID:
- 분산 로봇 데이터 수집
- 표준화된 태스크 정의
- 품질 검증 프로토콜
LeRobot (Hugging Face):
- 오픈소스 로봇 학습 프레임워크
- 표준 데이터 포맷
- 커뮤니티 기반 데이터 공유
11. 결론
11.1 종합 평가
XRoboToolkit은 VLA 시대의 대규모 로봇 시연 데이터 수집이라는 시의적절한 문제를 해결하기 위한 체계적인 접근법을 제시합니다. OpenXR 표준 채택을 통한 크로스 플랫폼 호환성, QP 기반 IK를 통한 안정적인 로봇 제어, 그리고 모듈러 아키텍처를 통한 확장성은 이 프레임워크의 핵심 강점입니다.
특히 π₀ 모델 파인튜닝 실험에서 100개 시연만으로 100% 성공률을 달성하고, 학습된 정책이 적응적 행동을 자발적으로 발현한 것은 XRoboToolkit의 데이터 품질이 VLA 학습에 충분함을 입증합니다.
11.2 강점 요약
- OpenXR 기반 표준화: 다양한 XR 헤드셋 지원으로 접근성 향상
- 저지연 스테레오스코픽 비전: 몰입감 있고 직관적인 텔레오퍼레이션 경험
- QP 기반 IK: 특이점 근처에서도 안정적인 로봇 모션 생성
- 다양한 트래킹 모달리티: 컨트롤러, 핸드, 전신 트래킹 통합
- 모듈러 아키텍처: 다양한 로봇 플랫폼과 시뮬레이터 지원
- 오픈소스 공개: 커뮤니티 참여 및 발전 가능
11.3 약점 및 개선 필요 영역
- 전신 트래킹의 플랫폼 의존성: OpenXR 표준화 부재
- 휴머노이드 검증 부족: 전신 텔레오퍼레이션 미검증
- 커플링 관절 미지원: 특정 로봇 핸드 호환성 제한
- 햅틱 피드백 부재: 촉각 정보 활용 불가
- 대규모 데이터 수집 인프라 미비: 분산 수집 시스템 필요
11.4 향후 전망
XRoboToolkit은 로봇 텔레오퍼레이션과 VLA 학습의 교차점에서 중요한 위치를 차지합니다. 휴머노이드 로봇의 급격한 발전, 기반 모델의 성숙, 그리고 대규모 데이터에 대한 수요 증가는 이러한 프레임워크의 중요성을 더욱 부각시킬 것입니다.
PICO(ByteDance)가 주도하고 학계(Georgia Tech, George Mason University)가 협력하는 이 프로젝트는 산학 협력의 좋은 예시이며, 오픈소스 공개를 통해 커뮤니티의 발전에 기여하고 있습니다. SII 2026 채택은 이 연구의 학술적 가치를 인정받은 것이며, 향후 더 많은 연구자와 개발자가 이 프레임워크를 활용하여 로봇 학습의 발전에 기여할 것으로 기대됩니다.
참고문헌
- Zhao, Z., Yu, L., Jing, K., & Yang, N. (2025). XRoboToolkit: A Cross-Platform Framework for Robot Teleoperation. arXiv:2508.00097.
- Black, K., et al. (2024). π₀: A Vision-Language-Action Flow Model for General Robot Control. Physical Intelligence.
- Zhao, T., et al. (2023). Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware (ALOHA). RSS 2023.
- Wu, P., et al. (2024). GELLO: A General, Low-Cost, and Intuitive Teleoperation Framework for Robot Manipulators. CoRL 2024.
- Cheng, X., et al. (2024). Open-TeleVision: Teleoperation with Immersive Active Visual Feedback. CoRL 2024.
- Kim, M. J., et al. (2024). OpenVLA: An Open-Source Vision-Language-Action Model. arXiv:2406.09246.
- Wang, X., et al. (2024). ACE: A Cross-platform Visual-Exoskeletons System for Low-Cost Dexterous Teleoperation. CoRL 2024.
- He, Z., et al. (2024). TWIST: Teleoperated Whole-Body Imitation System. arXiv:2505.02833.
⛏️ Dig Review
⛏️ Dig — Go deep, uncover the layers. Dive into technical detail.
소개 (배경과 필요성)
로봇의 자율성 향상을 위한 인공지능 연구에는 대규모 고품질 로봇 시연 데이터셋의 확보가 필수적입니다. 특히 Vision-Language-Action (VLA) 모델 등 최신 로봇 학습 기법들은 방대한 양의 인간 시연 데이터를 필요로 합니다. 이러한 데이터를 수집하는 주요 수단 중 하나가 원격 조작(teleoperation)인데, 기존 원격제어 방법들은 각각 한계를 가지고 있습니다:
- 리더-팔로워(Leader-Follower) 방식: 인간 동작을 로봇에 기계적으로 따라하게 하는 방식으로 낮은 지연과 직관적 제어가 장점이지만, 특정 로봇에 맞춘 전용 하드웨어가 필요하여 확장성과 접근성이 떨어집니다.
- 비전 기반 원격조작: 카메라 영상을 보며 조이스틱 등으로 조작하는 방식으로 다양한 로봇에 유연하게 적용할 수 있지만, 불안정한 추적 성능과 높은 지연(latency)으로 인해 제어 정확도와 데이터 품질이 저하되는 문제가 있습니다.
- 가상현실(VR/XR) 기반 원격조작: 상용 HMD(Headset)를 활용해 입체적 시각 피드백과 직관적인 제스처 제어가 가능하여 다수 로봇 플랫폼에 일반화할 수 있는 유망한 대안입니다. 그러나, 기존 XR 원격제어 솔루션들은 설정이 복잡하고 개별 HMD용 Unity SDK나 WebXR 플랫폼에 의존하는 경우가 많아 호환성 문제와 추가 지연을 초래하는 단점이 있습니다. 또한 XR 디바이스와 로봇 제어기 사이에 표준화된 데이터 포맷이 부재해, 새로운 XR 기기나 로봇을 연결하려면 상당한 통합 작업이 필요했습니다.
이런 한계를 해결하기 위해 ByteDance PICO 연구진은 OpenXR 표준 기반의 크로스플랫폼 원격제어 프레임워크인 XRoboToolkit을 개발했습니다. XRoboToolkit은 XR 기기와 로봇 플랫폼/시뮬레이터를 아우르는 모듈식 소프트웨어 키트로, 저지연 스테레오 비디오 피드백, 최적화 기반 역기구학(IK), 그리고 머리/손/컨트롤러/동작트래커 등 다양한 추적 모달리티 지원이 특징입니다. 이 글에서는 XRoboToolkit 논문을 바탕으로, 로봇공학자의 관점에서 XRoboToolkit의 전체 아키텍처, 구성 요소별 역할, 외부 기술과의 통합 방식(ROS, Unity, WebRTC 등), 멀티플랫폼 지원 구조, 설계상의 강점과 한계, 기존 프레임워크와의 비교, 그리고 활용 가능성 및 향후 발전 방향을 심층적으로 살펴보겠습니다.
XRoboToolkit 아키텍처 개요
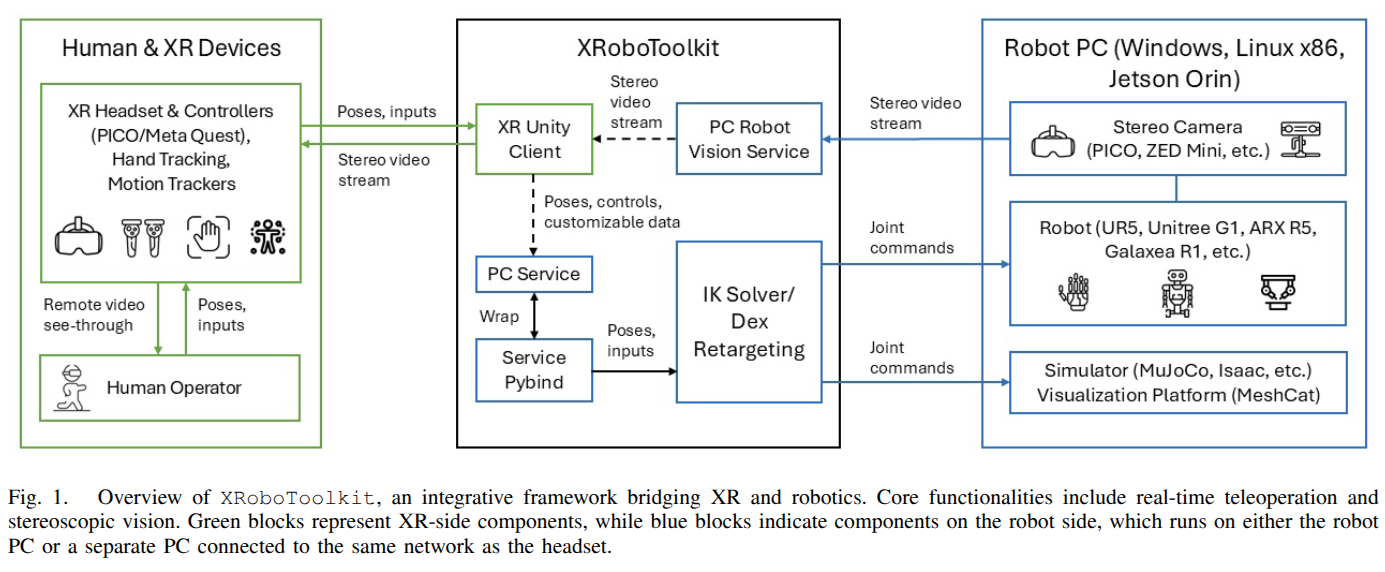
그림 1. XRoboToolkit 프레임워크의 전체 아키텍처 개요. Green 색 블록은 XR 디바이스 측 구성 요소들 (휴먼 인터페이스), Blue 색 블록은 로봇 PC 측 구성 요소들을 나타낸다. 중앙의 XRoboToolkit 모듈들이 XR 장치와 로봇 시스템을 연결하며, 실시간 원격조작과 스테레오 비전의 핵심 기능을 제공한다.
XRoboToolkit은 크게 XR 디바이스 측과 로봇 측으로 나뉘어 동작합니다. XR 디바이스 측에는 Unity 기반 XR 클라이언트 애플리케이션이 VR/AR 헤드셋(예: PICO 4, Meta Quest 3)에 설치되어 실행됩니다. 사용자의 머리 위치/자세, 양손 컨트롤러 및 손가락 관절 움직임, 전신 동작(추가 모션 트래커 활용 시) 등을 OpenXR 인터페이스를 통해 실시간으로 수집하며, 사용자에게 입체적 시각 피드백(stereoscopic visual feedback)을 제공합니다.
로봇 측에는 PC(Service) 모듈과 로봇 제어 모듈(IK/디렉스터리타게팅)이 존재합니다. XR 헤드셋에서 수집된 자세/입력 데이터 스트림은 네트워크를 통해 PC 서비스(XRoboToolkit-PC-Service)라는 C++ 기반 서버로 전송되고, 이 서비스는 도착한 데이터를 클라이언트(로봇 제어 애플리케이션)에 전달합니다. 개발자는 C++ 서비스에 직접 연결하거나, Pybind 기반 Python 인터페이스(XRoboToolkit-PC-Service-Pybind)를 통해 보다 쉽게 이 데이터를 구독할 수 있습니다. 이렇게 받은 사용자 추적 데이터를 활용하여 역기구학 IK solver와 손동작 매핑(덱스터러스 리타게팅) 알고리즘이 로봇 제어 명령을 산출합니다. 이 부분은 XRoboToolkit-Teleop-Sample-Python 등으로 제공되며, UR5, ARX R5 같은 로봇 팔, Galaxea R1-Lite와 같은 모바일 매니퓰레이터, Shadow 로봇 손 등 다양한 로봇 플랫폼과, MuJoCo 시뮬레이션 환경까지 연동 가능하도록 구현되었습니다. 한편, 로봇 측에는 Robot Vision 모듈이 존재하여 로봇에 장착된 스테레오 카메라 (예: PICO 헤드셋 카메라 또는 외부 ZED Mini 카메라)로부터 영상을 받아들인 뒤, 이를 실시간 스트림으로 인코딩하여 XR 디바이스 측 Unity 클라이언트로 전송하는 역할을 합니다.
요약하면 XRoboToolkit 아키텍처는 XR HMD & 컨트롤러 ↔︎ Unity XR 클라이언트 ↔︎ PC 통신 서비스 ↔︎ 로봇 제어/시뮬레이터의 계층적 구조를 가지며, 각 모듈이 표준화된 데이터 포맷과 인터페이스로 상호 작용함으로써 유연하고 확장성 있는 원격제어 프레임워크를 달성했습니다.
구성 요소별 역할 (Control, Communication, Robot Abstraction Layer)
XRoboToolkit의 각 구성 요소는 제어, 통신, 로봇 추상화라는 계층적 역할을 나누어 담당합니다. 아래에서는 이러한 계층별 핵심 기능과 역할을 살펴봅니다.
제어 계층: 사용자 입력 처리와 로봇 명령 생성
제어 계층은 사용자의 동작을 로봇 제어 명령으로 변환하는 모든 기능을 포괄합니다. XRoboToolkit에서는 여러 가지 제어 모드를 지원하는데, 크게 매니퓰레이터 제어를 위한 역기구학(IK), 손 동작을 로봇 손으로 매핑하는 덱스터러스 핸드 리타게팅, 머리 움직임을 로봇 카메라 제어에 반영하는 헤드 트래킹, 모바일 로봇 베이스 조작 등이 이에 해당합니다.
- 역기구학 기반 팔 제어: 사용자가 VR 컨트롤러를 움직이면, 그 변위를 로봇 팔 말단효과기(End-Effector)의 목표 위치 변화로 해석합니다. XRoboToolkit은 Quadratic Programming (QP) 기반의 IK 솔버를 탑재하여, 로봇 관절의 목표 각도를 실시간 최적화로 계산합니다. 이 솔버는 Pinocchio 물리 엔진을 바탕으로 하며, 추가적인 제약과 정규화를 쉽게 포함시킬 수 있어 특이점 근처에서도 안정적인 동작을 보장합니다. 예컨대 Manipulator의 조작 가능도(manipulability)를 높이는 정규화 항을 추가하여, 특이점 부근에서 관절 움직임이 갑자기 불안정해지지 않도록 합니다. 또한 컨트롤러 그립 버튼을 눌러야만 로봇 팔이 따라 움직이도록 하여, 사용자가 그립을 잡은 시점을 기준으로 한 상대 움직임(relative motion) 제어를 구현했습니다. 이를 통해 VR 환경에서 손을 움직일 때 로봇이 1:1로 즉각 따라오는 것이 아니라, 잡은 순간의 자세 대비 변화만 따라오게 해 안정적이고 직관적인 조작감을 줍니다. 더 나아가, 보조 트래커(예: 팔꿈치에 부착)를 사용하면 인간 팔꿈치의 위치를 추적해 IK 계산에 추가 제약으로 활용할 수 있습니다. 이는 7자유도 이상의 여유자유도(잉여, redundant)를 가지는 로봇팔에 사람이 팔꿈치를 움직여 자연스러운 자세를 지정할 수 있게 해주며, 작업공간 내에서 인체공학적인 팔 움직임을 로봇이 보이도록 합니다.
- 덱스터러스 손 리타게팅: VR 헤드셋의 손 추적 기능(예: PICO 헤드셋의 카메라 기반 손 추적)으로 얻은 양손의 26개 관절 데이터를 로봇 손의 관절 공간에 매핑하여, 정밀 조작에 활용하는 기능입니다. XRoboToolkit은 OpenXR 표준의 손 모델 관절 좌표(엄지 4관절, 나머지 손가락 각 5관절, 손바닥+손목 등 총 26개)를 사용하며, 각 프레임마다 손가락의 6-자유도 자세 정보를 얻습니다. 이 데이터를 로봇 핸드(Shadow Hand 등)의 키포인트 위치에 실시간 대응시켜, 인간 손의 자세를 로봇 손가락 각도로 변환합니다. 구체적으로, 시간 t에서 인간 손 모델의 i번째 관절 위치를 , 로봇 손의 대응 지점 위치를 라 할 때, ** 를 최소화하는 로봇 손 관절 구성 를 계산하는 최적화를 수행합니다. 손 크기 차이를 보정하기 위한 스케일링 인자나 해가 불안정할 때를 대비한 정규화 항도 포함되어 있습니다. 이 방식을 통해 별도 장비 없이 HMD 하나만으로 섬세한 손동작 텔레옵이 가능해졌으며, 실제 Shadow Robot 손** 시뮬레이션을 통해 VR 손짓으로 물체를 잡고 조작하는 실험을 성공적으로 시현했습니다.
- 헤드 트래킹 및 시선 제어: 사용자의 머리 움직임(회전/위치 추적)을 로봇의 시각 센서 방향 제어에 활용할 수 있습니다. 예를 들어 XRoboToolkit을 듀얼 UR5 로봇팔에 적용한 사례에서, 2자유도(좌우 회전, 상하 회전) 짐벌에 VR 헤드셋(PICO 4)을 부착하고, 이를 로봇의 능동 스테레오 카메라로 사용했습니다. 인간 운영자가 머리를 돌리면 짐벌이 실시간으로 따라 돌면서, 원격 로봇 현장의 시야 방향이 동일하게 변화합니다. 이때 Roll(왼쪽기울임/오른쪽기울임) 회전축은 제외하여, 시각 입력과 사용자 내이감각의 불일치로 인한 멀미를 방지했습니다. 이러한 머리-카메라 연동으로 사용자는 원격 환경을 자율적으로 둘러볼 수 있고, 특히 정밀 작업시 깊이감 있는 시각 정보를 얻어 작업 성능을 높일 수 있습니다.
- 이동 플랫폼 제어: XR 컨트롤러의 조이스틱 입력을 이용해 이동형 로봇의 주행을 제어하는 것도 가능합니다. 예를 들어 한쪽 컨트롤러의 조이스틱 축은 전후/좌우 병진 이동속도를, 다른 컨트롤러의 조이스틱은 회전 속도를 매핑함으로써, VR 속에서 게임하듯이 원격지의 로봇 이동을 조작할 수 있습니다. 이러한 기능은 팔 조작과 병행하여, 사람 한 명이 모바일 매니퓰레이터를 움직여가며 작업하는 복합 시나리오도 지원합니다.
통신 계층: 데이터 및 영상 스트리밍
통신 계층은 XR 디바이스와 원격 로봇 시스템 간의 실시간 데이터 교환을 담당합니다. 핵심은 사용자 추적 데이터(포즈, 입력)와 스테레오 비디오 스트림을 저지연(low-latency)으로 주고받는 것입니다.
XRoboToolkit은 전용 SDK 기반의 스트리밍 서비스를 통해 이러한 통신을 구현했습니다. XRoboToolkit-PC-Service(C++)는 비동기 콜백 기반 아키텍처로 동작하여, VR 하드웨어로부터 수신한 데이터를 지연 없이 애플리케이션에 전달합니다. Unity로 작성된 XR 클라이언트는 이 PC 서비스와 네트워크 소켓으로 연결되어, JSON 형태로 패킹된 추적 데이터를 초당 90회(90 Hz) 전송합니다. OpenXR의 좌표계 기준으로 모든 트래킹 좌표를 일관되게 정의했으며(Fig.2(a)), JSON 오브젝트 내에 머리, 양손 컨트롤러, 손가락 관절, 전신 관절, 보조 트래커 등의 정보를 한꺼번에 담아 전송합니다.
이를테면 헤드셋의 위치와 쿼터니언(q)을 [px, py, pz, qx, qy, qz, qw]의 7개 부동소수점으로 표현하고, 각 손가락 관절의 6-DoF 포즈 26개 등도 배열로 포함됩니다. 이러한 단일 JSON 패킷 구조 덕분에 클라이언트 측 파싱이 단순해졌고, 활성화된 트래킹 모드에 상관없이 일관된 데이터 필드 구성을 유지할 수 있습니다.
비디오 스트리밍의 경우, XRoboToolkit은 맞춤 설계한 저지연 영상 전송 프로토콜을 사용합니다. 구체적으로 언급되진 않았지만, 영상 송수신을 위해 WebRTC와 유사한 P2P 스트리밍 기술이나 하드웨어 인코딩을 활용한 것으로 추정됩니다. 논문에서는 자체 구현한 솔루션이 기존 Open-TeleVision 대비 우수한 지연 성능을 보였다고 보고합니다. 실험 결과 XRoboToolkit의 스트리밍 지연은 ZED Mini 카메라 → PICO HMD 구성에서 평균 82.0ms로, Open-TeleVision (ZED→Quest)의 121.5ms보다 크게 개선되었습니다. 또한 PICO 자체 카메라를 이용한 스트리밍(헤드셋→헤드셋)에서도 약 100ms 지연으로 동작하여, 별도 PC 없이도 수용 가능한 성능을 보였습니다. 이때 해상도 1280×720, 60 FPS, 1Mbps 비트레이트 조건을 맞추어 공정 비교했으며, XRoboToolkit의 경우 지연 편차도 더 작아 안정적임을 확인했습니다 (표 II 참조). 이러한 결과는 네트워크 지연과 패킷 손실을 최소화하는 최적화 덕분이며, 실제 GitHub 문서에도 “<100ms latency, <1% packet loss” 달성을 언급하고 있습니다.
정리하면, XRoboToolkit의 통신 계층은 고주파수 모션 데이터 스트림과 스테레오 영상 스트림을 병렬로 처리하면서, OpenXR 기반 표준화 데이터 포맷과 맞춤형 저지연 프로토콜로 원격 현실감(telepresence)을 극대화하는 역할을 합니다.
로봇 추상화 계층: 다종 로봇 및 시뮬레이터 통합
로봇 추상화 계층은 다양한 로봇 플랫폼이나 시뮬레이션 환경을 손쉽게 연결하기 위한 인터페이스를 제공합니다. XRoboToolkit의 설계 철학은 로봇 종속적인 부분을 최소화하고, 새로운 로봇을 추가할 때 모듈만 교체하거나 확장하면 되도록 하는 데 있습니다. 이를 위해 로봇 측 인터페이스를 Python 및 C++ 모듈로 개방하여, 개발자가 자신의 로봇 제어 코드나 시뮬레이터를 XRoboToolkit의 데이터 스트림에 바인딩하기 쉽게 만들었습니다.
예를 들어 실제 로봇의 경우, Universal Robots UR5나 ARX R5 팔에 대한 제어는 XRoboToolkit-Python 샘플 코드에서 해당 로봇의 API 호출로 구현되어 있습니다. UR5의 경우 ROS2 환경에서 팔 제어 토픽으로 IK 결과값(관절각도 명령)을 publish하거나, UR 자체 라이브러리(예: RTDE or MoveIt)를 호출하도록 구성할 수 있습니다. 실제 XRoboToolkit 프로젝트에는 ROS2 통합 모듈(XRoboToolkit-Teleop-ROS)도 별도로 제공되어, ROS 2 에코시스템에서 PICO XR 원격제어를 손쉽게 활용하도록 돕고 있습니다. 이러한 ROS 연동을 통해, 기존 로봇 운영 소프트웨어에 XRoboToolkit을 플러그인 형태로 붙여 쓸 수도 있습니다.
시뮬레이터의 경우, 현재는 MuJoCo 물리 시뮬레이션에 대한 네이티브 지원이 제공됩니다. 개발자는 MuJoCo로 만든 로봇 모델을 XRoboToolkit Python 샘플에 등록하여, VR 제어 입력이 오면 MuJoCo 내부의 로봇 관절에 명령이 가고, 그 결과를 화면에 실시간 렌더링하게 할 수 있습니다. 또한 MeshCat과의 연동 예시도 존재하는데, 이는 3D 웹 비주얼라이제이션 도구인 MeshCat을 통해 텔레프레즌스 UI를 구성한 사례입니다. 예컨대 Unitree G1 휴머노이드 상체를 MeshCat으로 띄워놓고, 사용자가 팔꿈치 트래커까지 활용한 VR 조작을 하면 해당 움직임이 MeshCat 상의 3D 모델에 실시간 반영되는 식입니다.
로봇 추상화 계층의 강력한 점은, 새로운 로봇이든 시뮬레이터든 공통된 데이터 인터페이스(XR 트래킹 데이터 → 로봇 명령)만 맞추면 XRoboToolkit의 나머지 기능을 그대로 활용할 수 있다는 것입니다. 덕분에 정밀 산업용 로봇팔, 휴머노이드, 이동형 로봇, 로봇 손, 가상 환경 등 이기종 시스템을 하나의 XR 인터페이스로 조종하는 통합 환경이 현실화되었습니다. 연구팀은 논문에서 UR5, ARX R5, Galaxea R1-Lite, Shadow Hand, MuJoCo 등을 연동 시연하였으며, 앞으로도 추가 로봇/시뮬레이터 지원이 용이하다고 강조합니다.
외부 기술과의 통합 (ROS, Unity, WebRTC 등)
XRoboToolkit의 개발 및 활용에는 여러 외부 기술 스택이 활용되었으며, 각각에 대한 통합 방식은 다음과 같습니다:
- Unity (OpenXR): XRoboToolkit의 프론트엔드 애플리케이션은 Unity 게임엔진으로 구현되었습니다. Unity는 다양한 플랫폼으로의 빌드를 지원하므로, PICO나 Quest 등의 Android 기반 VR 헤드셋에 네이티브 앱으로 설치가 가능하고, PC VR 환경으로도 빌드할 수 있습니다. XRoboToolkit Unity 클라이언트는 OpenXR 플러그인을 통해 기기 제어와 센서 데이터를 받아오는데, OpenXR 표준을 채택함으로써 단일 코드베이스로 여러 XR 디바이스에 대응할 수 있습니다. 즉, PICO 전용 SDK나 Oculus SDK 각각을 사용하는 대신, OpenXR 통합으로 호환성과 표준화를 달성한 것입니다. Unity 내에서는 네트워크 패널 등을 통해 PC 서비스와의 연결(IP, 연결 상태 등)을 설정하고, 트래킹 패널에서 어떤 데이터를 전송할지 선택할 수 있게 UI가 구성되었습니다. 또한 원격 비전 패널을 통해 영상 스트림의 상태를 모니터링하고, 데이터 수집 패널로 녹화 기능도 제공합니다. 이런 UI들은 모두 Unity 기반으로 제작되어 사용 편의성을 높였고, 개발자가 필요 시 Unity 프로젝트를 수정하여 새로운 기능(예: 다른 카메라 소스 추가 등)을 반영할 수 있습니다.
- ROS (Robot Operating System): 앞서 언급했듯 XRoboToolkit은 ROS와도 연계가 가능합니다. ROS1의
rospy/roscpp또는 ROS2의rclpy/rclcpp를 통해 XRoboToolkit으로부터 받은 제어 명령을 로봇 토픽으로 퍼블리시하거나, 반대로 로봇 상태를 구독해 피드백으로 활용할 수 있습니다. 특히 XRoboToolkit-Teleop-ROS2 모듈은 PICO XR 헤드셋을 ROS2 네트워크에 연결하여, 예컨대/joy토픽처럼 헤드셋/컨트롤러 데이터를 ROS 메시지로 변환해주는 기능을 제공합니다. 이를 이용하면 기존 ROS 기반 스택에 큰 변경 없이 XR 원격제어 인터페이스를 덧붙일 수 있어, 로봇 연구자들이 익숙한 ROS 환경과의 통합이 용이합니다. 또한 ROS 생태계의 다양한 센서 드라이버나 모션 플래닝 툴과 조합하여, XRoboToolkit을 원격 조작 + 자율 하이브리드 시스템으로 확장할 수도 있습니다 (예: 사람이 XR로 조작하다가 ROS 자율주행으로 전환 등). - WebRTC 및 네트워크 스트리밍: XRoboToolkit은 웹 기술(WebRTC)을 전면에 내세우진 않았지만, 근본적으로 실시간 양방향 미디어 스트리밍을 수행한다는 점에서 WebRTC와 유사한 기법이 활용됩니다. WebRTC는 웹브라우저에서 영상/오디오 스트림을 주고받을 때 표준적으로 쓰이는 P2P 프로토콜로, 낮은 지연과 패킷 손실 대응이 강점입니다. XRoboToolkit 개발팀은 PC와 HMD 간 네트워크 지연을 최소화하기 위해 로컬 네트워크 P2P 연결과 하드웨어 가속 인코딩을 사용한 커스텀 프로토콜을 만들었으며, 결과적으로 100ms 이하의 영상 지연 및 1% 미만의 패킷 손실을 달성했습니다. 만약 사용자가 웹 브라우저 기반의 뷰어를 만들고자 한다면, XRoboToolkit의 영상 스트림을 WebRTC로 게이트웨이하여 송출하는 것도 가능할 것입니다. 실제로 GitHub 저장소에는 Jetson Orin용 영상 송신기(XRoboToolkit-Orin-Video-Sender)가 존재하는데, 이는 NVIDIA Orin에서 카메라 영상을 인코딩하여 네트워크로 보내는 컴포넌트입니다. 이러한 모듈을 확장하면 웹 대시보드나 원격 모니터링 페이지에도 XRoboToolkit의 실시간 영상을 띄우는 등, WebRTC를 포함한 다양한 네트워크 환경에서 재사용할 수 있습니다.
멀티플랫폼 지원 구조
XRoboToolkit의 크로스플랫폼 지원은 두 측면으로 볼 수 있습니다: XR 클라이언트 측의 플랫폼 다변화와 로봇 시스템 측의 환경 다양화입니다.
- XR 클라이언트 측 멀티플랫폼: OpenXR 기반 Unity 클라이언트는 스탠드얼론 VR 헤드셋(안드로이드 기반) 뿐만 아니라 PC 기반 VR 헤드셋(Windows)에도 이식 가능합니다. 현재 공식적으로 PICO 4와 Meta Quest 3에서 테스트되었으나, OpenXR을 지원하는 HTC Vive, Valve Index, Windows Mixed Reality 등도 이론적으로 호환됩니다. Unity 프로젝트를 모바일(Android)로 빌드할지 데스크톱으로 빌드할지만 선택하면 되므로, 하드웨어 제약에서 자유로운 XR 인터페이스를 제공하는 셈입니다. 한편, WebXR과 같은 브라우저 기반 VR는 사용하지 않았는데, 이는 앞서 언급한 대로 추가 지연과 호환성 이슈 때문입니다. 대신 네이티브 앱 방식을 취하여, VR/AR HMD 기기의 성능을 최대한 활용하면서도 다양한 디바이스에 대응하도록 했습니다. 결과적으로 XRoboToolkit은 모바일 VR (예: PICO), 콘솔형 VR (예: Quest), PC VR 등 XR 디바이스 플랫폼 전반을 포괄하는 유연성을 갖추었습니다.
- 로봇 PC 측 멀티플랫폼: 로봇 제어와 영상 처리를 담당하는 PC 서비스/로봇 모듈은 Windows, Linux(x86), 임베디드 리눅스(Jetson Orin) 등 여러 환경에서 동작합니다 . 예를 들어 ZED Mini 카메라는 Windows 11 랩톱에 연결해 쓰기도 하고, Jetson Orin에 연결해 헤드셋과 직접 통신시키기도 했습니다. PICO 4 헤드셋 자체도 안드로이드 OS이지만 강력한 SoC를 갖춘 일종의 컴퓨터이므로, 경우에 따라 PC 없이 HMD만으로 원격제어를 구성할 수도 있습니다 (PICO 4 → PICO 4 스트리밍 시나리오). 이러한 다양한 조합을 지원하는 이유는, XRoboToolkit이 네트워크 프로토콜로 모듈들을 느슨하게 연결하고 있고, 플랫폼 독립적인 언어(C++, Python)로 서비스를 구현했기 때문입니다. 따라서 개발자는 노트북-와이파이 환경이든 고정 워크스테이션-이더넷 환경이든, 혹은 ROS가 구동되는 로봇 컴퓨터든, 자기가 처한 조건에 맞춰 시스템을 구성하면 됩니다. 논문에서 예시로 든 이중 UR5 팔 + 능동 스테레오 헤드 데모의 경우 Windows PC가 사용되었고, 모바일 매니퓰레이터 Galaxea R1-Lite의 경우 Jetson 기반으로 구동한 것으로 보입니다. 결국 XRoboToolkit은 HMD/PC 조합에 유연성을 두어, 연구실 데스크탑부터 현장 로봇의 온보드 컴퓨터까지 아우르는 멀티플랫폼 원격제어 프레임워크를 실현했습니다.
아키텍처 설계의 강점
XRoboToolkit의 설계에는 기존 대비 돋보이는 장점들이 다수 존재합니다. 핵심 강점을 정리하면 다음과 같습니다:
- 표준화와 모듈화: OpenXR 기반 인터페이스 채택으로 HMD/컨트롤러 입력이 표준화되어, 새로운 XR 기기도 쉽게 지원 가능합니다. 로봇 측도 Python/C++ 모듈로 추상화되어 다양한 로봇을 플러그인 방식으로 연결할 수 있습니다. 이런 모듈식 아키텍처 덕분에 시스템 통합 부담이 크게 경감됩니다.
- 저지연 성능: 최적화된 네트워크 프로토콜과 효율적인 비디오 인코딩/디코딩 파이프라인으로 100ms 수준의 낮은 영상 지연을 달성했습니다. 이는 원격 조작시 사용자 멀미 감소와 반응성 향상으로 이어져, 데이터 수집 품질과 조작 성공률을 높여줍니다. Open-TeleVision 대비 우수한 지연 성능은 이를 잘 보여줍니다 (121ms → 82ms 감소).
- 풍부한 추적 모달리티 지원: 단순히 컨트롤러 6-DoF 입력뿐만 아니라 손가락 관절 26-DoF, 전신 24-관절 모션캡처, 보조 물체 트래커 등 다양한 입력을 동시에 수용합니다. 이를 통해 정교한 조작(예: 손동작)부터 휴머노이드 전체 자세 제어까지 폭넓게 대응할 수 있어, 복잡한 인간 동작 시연에 적합합니다.
- 시뮬레이터 및 실제 로봇 동시 지원: 하나의 프레임워크로 물리 시뮬레이션(MuJoCo)과 실제 로봇 모두 제어할 수 있습니다. 연구 개발 단계에선 시뮬레이터로 실험하고, 곧바로 같은 코드로 실제 로봇에 적용하는 식의 시뮬레이션-현실 통합 워크플로우가 가능해집니다. 이는 개발 생산성과 재현성 향상에 기여합니다.
- 데이터 수집 최적화: XRoboToolkit Unity 앱에는 데이터 수집 패널이 있어, 원격조작 중 모은 데이터(포즈 트래킹 로그 + 스테레오 영상)를 자동으로 로컬 저장하고 타임스탬프로 인덱싱할 수 있습니다. 덕분에 연구자가 별도 스크립트 작성 없이도 데이터셋을 손쉽게 축적할 수 있습니다. 또한 수집된 시演 데이터로 실제 VLA 모델을 파인튜닝한 결과, 100% 성공률의 자율 정책을 학습시키는 등 데이터 품질의 우수성을 입증했습니다.
- 개발자 친화성과 오픈소스: XRoboToolkit은 논문과 함께 오픈소스로 공개되어 GitHub에서 SDK와 샘플 코드를 제공합니다. Unity 클라이언트, C++ 서비스, Python 샘플, ROS2 패키지까지 모두 접근 가능하여, 로봇공학 연구자들이 자신들의 환경에 맞게 수정 및 확장하기에 용이합니다. 또한 Discord 커뮤니티와 문서를 통해 활발한 지원을 받을 수 있어, 오픈 커뮤니티 주도 발전 가능성도 높습니다.
한계점 및 개선 필요 요소
완벽해 보이는 XRoboToolkit에도 몇 가지 제한사항과 향후 보완이 필요한 부분이 존재합니다:
- XR 디바이스 간 완전한 호환성 문제: OpenXR로 많은 부분 표준화했지만, 전신 추적의 경우 현재 PICO 4가 제공하는 24 관절 모델에 의존하고 있습니다. OpenXR에 아직 전신 모델 표준이 없어서 발생한 문제인데, 만약 다른 HMD 제조사의 전신 추적 스펙이 다르면 곧바로 호환되지 않을 수 있습니다. 즉, XR 디바이스마다 Skeletal 모델이 상이한 점은 현 시점에서 제약입니다.
- 휴머노이드 로봇에 대한 검증 부족: 전신 트래킹 데이터를 휴머노이드 로봇에 매핑하여 원격조작한 사례는 아직 없습니다. 사람의 전신 동작 → 로봇 모션으로 리타게팅하는 것은 추가적인 모션 변환 알고리즘과 안정화가 필요합니다. 향후에야 이 부분을 구현·검증하여 사람 형태 로봇의 XR 원격조작도 가능해질 것으로 보입니다.
- 손 리타게팅의 한계: 현재 핸드 리타게팅 기법은 각 손가락 관절이 독립적으로 움직인다는 전제를 둡니다. 하지만 실제 로봇 손(예: INSPIRE Hand 등)은 다수의 관절이 기계적으로 연쇄 구동되어 움직임이 묶여있는 underactuated 구조입니다. 이런 경우 현 방식은 정확히 대응이 안 되며, 구속 조건을 고려한 리타게팅 알고리즘 개발이 필요합니다.
- 시뮬레이터 지원 범위 제한: MuJoCo 이외의 시뮬레이션 플랫폼(PyBullet, Gazebo, IsaacGym 등)은 아직 XRoboToolkit에 기본 지원되어 있지 않습니다. 다양한 시뮬레이터를 다루는 통합 인터페이스가 없다 보니, 각각 별도 연동 작업을 거쳐야 합니다. 다행히 오픈소스 프로젝트인 Roboverse 등을 통해 여러 시뮬레이터를 추상화하려는 시도가 있으므로, 이를 수용하면 멀티-시뮬레이터 호환성이 향상될 것으로 기대됩니다.
- 사용자 경험 측면: PICO 4 Ultra의 경우 영상 품질이나 시야각 측면에서 ZED Mini보다 우수했다고 하지만, 아직 VR HMD의 해상도나 광학 성능 한계로 인해 장시간 원격 작업시 시각적 피로가 있을 수 있습니다. 또한 HMD를 머리에 쓰는 부담 때문에, 논문에서 제안한 것처럼 헤드셋을 목에 걸고 컨트롤러만 사용하는 변형 사용도 고려해야 합니다. 이는 시스템의 문제가 아니라 하드웨어의 한계이지만, 장시간 텔레옵의 인체공학적 문제도 추후 해결해야 완성도 높은 프레임워크가 될 것입니다.
기존 원격제어 프레임워크와의 비교
XRoboToolkit이 제시하는 접근법을, 앞서 소개했던 다른 원격조작 패러다임들과 비교하면 다음과 같습니다:
- 하드웨어 리더-팔로워 방식 vs. XRoboToolkit: 리더-팔로워는 예를 들어 마스터 로봇 팔을 인간이 조작하면, 원격 슬레이브 로봇 팔이 똑같이 따라하는 형태입니다. 지연이 거의 없고 감각 피드백(햅틱 등)을 주기도 용이하지만, 로봇 종류별로 맞춤 설계된 마스터 장치가 필요합니다. 반면 XRoboToolkit은 상용 HMD와 컨트롤러만으로 범용 인터페이스를 제공하기 때문에 특정 로봇에 국한되지 않고, 하나의 HMD 세트로 여러 로봇을 조종할 수 있습니다. 비용 측면에서도 전문 하드웨어 없이 구현 가능하다는 장점이 있습니다. 다만 물리적 1:1 대응 장치가 없으므로 촉각 피드백 부재는 한계일 수 있습니다.
- 순수 카메라+조이스틱 텔레옵 vs. XRoboToolkit: 기존에 흔히 쓰이는 방식으로, 로봇에 부착된 카메라 영상(2D)을 모니터로 보면서 키보드/조이스틱으로 원격 조종하는 시스템이 있습니다. 이는 기술 구현이 간단하고 네트워크 대역도 적게 쓰지만, 깊이 정보 부족과 낮은 몰입감으로 정밀 작업에 한계가 있습니다. XRoboToolkit의 스테레오 비전과 VR 인터페이스는 이러한 단점을 해소하여, 사용자가 마치 현장에 있는 것처럼 입체감 있게 상황을 인지하고 손으로 직접 물체를 만지는 듯한 조작이 가능합니다. 따라서 복잡한 삽입 작업이나 미세 조작에서 성공률과 속도를 높일 수 있음을 실험으로 보여주었습니다 (지름 3mm 드라이버를 4mm 홀에 끼우는 작업을 0.5mm 여유로 수행 성공).
- 기존 XR 기반 원격제어 솔루션 vs. XRoboToolkit: 연구계와 산업계에서도 VR을 활용한 원격제어 연구들이 있었습니다. 그러나 다수는 Unity용 개별 HMD SDK(예: Oculus Integration)나 WebXR을 이용해 구현되어 디바이스 종속적이고 세부 튜닝이 어려웠습니다. Open-TeleVision 프로젝트의 경우 능동 스테레오 비전을 VR로 제공하는 체계를 제안했지만, XRoboToolkit과 비교해 구현의 복잡성이나 지연 면에서 아직 부족했던 것으로 보입니다. XRoboToolkit은 이들로부터 교훈을 얻어, OpenXR+네이티브 앱이라는 선택과 모든 구성요소 최적화를 통해 호환성과 성능 두 마리 토끼를 잡았습니다. 또한 앞선 프로젝트들이 로봇 특정 시나리오(예: 특정 공정) 위주였다면, XRoboToolkit은 범용 프레임워크로서 다양한 적용 예시(듀얼 암, 모바일 로봇, 손 조작 등)를 보여주어 범용성을 입증하였습니다.
- 상용 원격운용 제품 vs. XRoboToolkit: 혹시 테슬라의 Optimus 조종이나 기타 산업용 솔루션과 비교해보면, XRoboToolkit은 오픈소스이고 학술 검증이 되었다는 점에서 차별화됩니다. 상용 제품은 폐쇄적이어서 연구 활용에 제약이 있지만, XRoboToolkit은 커뮤니티 주도 개발로 새로운 기능을 빠르게 받아들이고, 연구자들이 직접 코드 레벨에서 개선에 참여할 수 있습니다. 이는 학술-산업 협력이나 프로토타이핑 관점에서 큰 이점입니다.
로봇공학자 관점의 활용 가능성, 확장성, 연구 기회
XRoboToolkit은 로봇공학 연구자와 개발자들에게 매력적인 도구로 다가올 수 있습니다. 몇 가지 활용 시나리오와 확장 가능성을 짚어보면:
- 대규모 시연 데이터 수집 및 학습: 인간이 VR로 편하게 로봇을 조작하며 데이터를 모을 수 있으므로, 기존보다 방대한 시연 데이터셋을 확보하기 쉽습니다. 특히 여러 사람이 HMD만 쓰면 동일한 환경에서 데이터를 모을 수 있으므로 크라우드소싱 원격조작도 가능할 것입니다. 이렇게 모은 데이터로 로봇 학습(模倣学習)을 진행하면, 연구팀이 논문에서 VLA 모델 성능 향상을 보인 것처럼, 보다 강건한 정책을 얻을 수 있습니다. 이는 곧 로봇의 자율성 향상과 일반화 능력 제고로 이어져, 로봇 학습 연구의 가속을 기대할 수 있습니다.
- 새로운 휴머노이드 조작 연구: XRoboToolkit의 전신 추적과 VR 인터페이스는, 휴머노이드 로봇 원격조작 연구에 새로운 길을 열어줍니다. 예를 들어 인간이 HMD와 모션슈트(또는 몇 개의 트래커)만으로 휴머노이드 로봇을 원격으로 조작하며, 동시에 로봇의 시점 영상을 VR로 보면서 원격 임무 수행을 연습할 수 있습니다. 이를 통해 휴머노이드의 재난 대응, 우주 원격 작업 등의 연구에서 사람의 모션을 얼마나 로봇에 잘 투영할 수 있는지, 사람-로봇 공동작업은 어떻게 최적화할지 등의 새로운 실험이 가능해집니다. 또한 궁극적으로는 전신 텔레프레즌스 로봇 개발에도 기여할 수 있습니다 (향후 전신 리타게팅 기술이 추가되면).
- 협동 및 다중 로봇 텔레옵: 하나의 XR 인터페이스로 여러 로봇을 동시에 제어하거나, 여러 사용자가 한 로봇을 공동 제어하는 협동 텔레옵 연구도 생각해볼 수 있습니다. XRoboToolkit은 네트워크 구조이므로, 이론적으로 한 로봇에 여러 HMD 사용자를 연결하거나 한 사용자가 여러 로봇에 명령 브로드캐스트하는 것도 가능합니다. 예컨대 한 사람은 모바일 로봇을 운전하고 다른 사람은 로봇 팔을 조작하며, VR 상에서는 같은 가상 공간에서 협업하는 식의 멀티플레이 원격 작업도 미래에 구현할 수 있을 것입니다.
- 인간-로봇 상호작용(HRI) 실험 플랫폼: 사람의 움직임과 의도가 VR을 통해 로봇에 전달되고, 로봇의 반응은 다시 VR로 피드백되는 폐루프 인터페이스는 HRI 연구에도 활용될 수 있습니다. 사람의 조작 패턴, 피로도, 몰입감 등의 데이터를 수집하여 텔레프레즌스 UX를 계량화하거나, 자율로봇 개입 타이밍 연구 (shared autonomy) 등에 쓸 수 있습니다. 실제 ByteDance 연구진은 XRoboToolkit을 활용한 자율보조 텔레옵 연구도 진행하여, VR 조작 중 특정 섬세한 손동작은 AI가 대신 수행하도록 하는 실험을 선보였습니다 (논문 Gallery에서 End-to-End Dexterous Arm-Hand VLA Policies 사례).
- 교육 및 기술 확산: 로봇공학을 배우는 학생들이 XRoboToolkit을 통해, 값비싼 로봇 하드웨어 없이도 VR로 가상의 로봇을 직접 조종해볼 수 있습니다. 이를 통해 로봇 제어 교육이나 텔레로보틱스 경진대회 등에 활용하여 기술 확산을 촉진할 수 있습니다. 오픈소스이므로 학교나 기관에서 커스터마이징하기도 용이합니다.
요약하면, XRoboToolkit은 범용성과 확장성을 갖춘 텔레로보틱스 플랫폼으로서, 연구자에게는 새로운 실험 기회를, 엔지니어에게는 실용적 솔루션을 제공할 잠재력이 큽니다.
정리 및 향후 발전 방향
XRoboToolkit은 크로스플랫폼 XR 원격조작 프레임워크로서 현 시점의 문제들을 상당 부분 해결한 혁신적인 사례입니다. OpenXR 표준에 기반한 통합 인터페이스, 사람의 다양한 움직임을 받아들이는 모달리티 지원, 고성능의 저지연 스트리밍, 그리고 이를 뒷받침하는 모듈형 아키텍처를 통해, 접근성과 확장성을 크게 향상시켰습니다. 저자들이 다양한 실험을 통해 입증했듯이, 이 프레임워크를 통해 수집된 데이터는 로봇 학습에 바로 활용될 수 있을 정도로 품질과 다양성을 확보할 수 있었고, 여러 형태의 로봇에 범용적으로 적용됨을 보여주었습니다.
물론 아직 남은 과제도 있습니다. 표준의 부재로 인한 전신 추적 데이터 호환 문제, 기계적 제약을 고려한 손동작 매핑 기술, 여러 시뮬레이터 지원 등이 그 예입니다. 다행히 저자들은 이러한 한계를 명확히 인지하고 있으며, OpenXR 표준화 작업 참여를 통해 XR 디바이스 간 호환성 강화를 추진하고, 손 및 전신 리타게팅 알고리즘 개선, Roboverse 같은 멀티-시뮬레이터 지원 등을 향후 연구 방향으로 제시했습니다. 또한 SII 2026 학회에 채택된 것을 계기로, 학계와 산업계의 폭넓은 피드백과 기여를 받아 꾸준히 업그레이드될 것으로 기대됩니다.
결론적으로, XRoboToolkit은 로봇공학자들에게 강력한 XR 인터페이스 도구를 제공하여, 원격 로봇 조작과 데이터 수집의 판도를 바꾸고 있습니다. 이 프레임워크를 통해 사람의 능숙한 조작 능력을 거리와 플랫폼의 한계를 넘어 로봇에게 이식함으로써, 향후 보다 똑똑한 로봇과 효율적인 인간-로봇 협업을 실현하는 밑거름이 될 것입니다. 앞으로 지속적인 개선과 커뮤니티 확장을 통해, XR-로보틱스 융합 연구의 활성화와 원격 로봇제어 기술의 성숙에 크게 기여하길 기대합니다.