flowchart LR
subgraph Input["입력"]
PC["포인트 클라우드\nP ∈ ℝ^(N×3)"]
TXT["언어 지시\n'grasp handle to pour'"]
end
subgraph Encoder["인코더"]
PF["PartField\n3D 인코더\n(파트 인식 특징)"]
TE["Qwen2.5 Tokenizer\n텍스트 토크나이저"]
MLP["MLP Projector\n(2-layer)"]
end
subgraph Backbone["LLM 백본 (Qwen2.5-0.5B)"]
direction TB
VT["비주얼 토큰\n(768개, 양방향 어텐션)"]
LT["언어 토큰\n(인과적 어텐션)"]
CT["접촉 토큰 생성\n⟨contact_start⟩\n⟨link⟩⟨px⟩⟨py⟩⟨pz⟩...\n⟨contact_end⟩"]
AT["액션 토큰 생성\n⟨action_start⟩\n{28×256-bin 토큰}\n⟨action_end⟩"]
end
subgraph Output["출력"]
CP["접촉 위치\n(물체 표면 3D 좌표)"]
GP["파지 자세\n(팜 포즈 + 관절 각도)"]
end
PC --> PF --> MLP --> VT
TXT --> TE --> LT
VT & LT --> CT --> AT
CT --> CP
AT --> GP
📃DextER 리뷰
llm
grasp
reasoning
Language-driven Dexterous Grasp Generation with Embodied Reasoning
언어로 손끝을 움직이게 하는 방법
- 🤖 DextER는 언어 기반 dexterous grasp 생성을 위해 hand link가 객체에 접촉하는 위치를 예측하는 contact-based embodied reasoning 방식을 제안합니다.
- 📈 이 모델은 DexGYS 벤치마크에서 67.14%의 grasp success rate를 달성하여 기존 state-of-the-art를 능가했으며, intention alignment에서 96.4% 향상을 보였습니다.
- 🎯 DextER의 autoregressive framework는 사용자가 부분적인 contact constraints를 지정하여 grasp 생성을 steerable하게 제어할 수 있는 fine-grained control 기능을 제공합니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
본 논문은 언어 기반의 정교한 dexterous grasp 생성을 위한 DextER를 제안합니다. 기존의 Vision-Language Models (VLMs)은 관측값을 직접 grasp parameter로 매핑하여 물리적 상호작용에 대한 중간 추론이 부족했습니다. DextER는 다지 로봇 팔(multi-finger hand) 조작을 위해 접촉 기반의 embodied reasoning을 도입하며, 이는 어떤 손 링크(hand link)가 객체의 어느 위치에서 접촉하는지를 예측하는 것이 핵심 통찰입니다. 이 접촉 예측은 높은 수준의 task semantics와 로봇의 embodiment 및 객체 형상의 물리적 제약 조건을 연결하는 embodiment-aware 중간 표현을 제공합니다.
핵심 방법론 (Core Methodology)
DextER는 주어진 3D point cloud P \in \mathbb{R}^{N \times 3}와 언어 지시 T로부터 dexterous hand의 grasp pose \mathbf{a} \in \mathbb{R}^D를 예측하는 것을 목표로 합니다. 여기서 D는 손의 자유도(degrees of freedom)를 나타냅니다. 본 모델은 이 예측을 중간 단계인 접촉 패턴(contact patterns) C를 통해 다음과 같이 분해합니다: p(\mathbf{a}, C|P, T) = p(C|P, T) \cdot p(\mathbf{a}|C, P, T) 여기서 접촉 예측 p(C|P, T)가 언어와 기하학적 이해를 grasp 생성에 연결하는 embodied reasoning 과정으로 작용합니다.
1. 모델 아키텍처 (Model Architecture)
DextER는 3D vision encoder, multimodal projector, Large Language Model (LLM) backbone으로 구성됩니다.
- Point Cloud Encoding: 입력 point cloud P로부터 PartField [22]를 사용하여 기하학적 특징 F \in \mathbb{R}^{M \times d}를 추출합니다. PartField는 2D SAM mask를 이용한 대조 학습(contrastive learning)을 통해 파트 분할(part-segmentation)을 위한 사전 학습이 되어 있으며, 이는 객체 표면의 접촉 위치를 정확하게 찾아내는 데 유리한 파트 기하학 인지 특징(part geometry-aware features)을 생성합니다. 추출된 특징은 경량 MLP를 통해 LLM의 임베딩 공간으로 투영됩니다.
- Action Tokenization: 연속적인 grasp parameter \mathbf{a} (28차원, 손바닥 자세 및 관절 각도 포함)는 이산적인 토큰 공간으로 토큰화됩니다. 각 차원은 N_a개의 균일한 bin으로 양자화되며, 각 양자화된 값은 고유한 토큰 \langle \text{action\_bin\_i} \rangle으로 표현됩니다. 전체 액션 시퀀스는 \langle |\text{action\_start}| \rangle와 \langle |\text{action\_end}| \rangle 특수 토큰으로 감싸집니다.
- LLM Backbone: Qwen2.5-0.5B [30, 42]를 LLM backbone으로 사용하며, point cloud embedding과 텍스트 프롬프트를 융합하여 이산적인 접촉 및 액션 토큰을 autoregressively 생성합니다.
2. Embodied Reasoning을 통한 접촉 예측 (Embodied Reasoning via Contact Prediction)
- Meta-prompts: 모델이 액션 생성 전에 접촉 추론에 참여하도록 유도하기 위해, “Think step by step: first predict which links contact where on the object, then predict the grasp pose”와 같은 명시적인 지시를 포함하는 meta-prompt를 사용합니다.
- Contact Representation: 접촉은 손의 링크 l_i (예: index finger middle link)와 객체 표면의 3D 접촉 위치 p_i \in \mathbb{R}^3의 쌍으로 구성된 C = \{(l_i, p_i)\}로 표현됩니다. 접촉 위치 p_i의 좌표는 데이터셋에서 계산된 고정된 3D bounding box 내로 정규화된 다음, 각 공간 차원이 N_{pos}개의 bin으로 균일하게 이산화되어 position token으로 매핑됩니다. 각 접촉은 \langle l_i \rangle \langle p_{ix} \rangle \langle p_{iy} \rangle \langle p_{iz} \rangle와 같은 시퀀스로 표현되며, 전체 접촉 예측은 \langle |\text{contact\_start}| \rangle와 \langle |\text{contact\_end}| \rangle로 감싸집니다. 필요한 모든 특수 토큰(action bin, position bin, link, delimiter 토큰)은 사전 학습된 tokenizer에 등록됩니다.
3. 훈련 전략 (Training Strategy)
- End-to-end 학습: point cloud 토큰, task description, contact 토큰, action 토큰을 포함하는 전체 시퀀스에 대해 표준 next-token prediction을 사용하여 모델을 end-to-end로 훈련합니다. 모델은 먼저 접촉 패턴을 예측한 다음, 이에 상응하는 grasp pose를 autoregressively 생성하도록 학습합니다.
- Hybrid Attention Mechanism: point cloud 토큰은 전역적인 기하학적 문맥을 포착하기 위해 양방향 어텐션(bidirectional attention)을 사용하고, 언어 및 액션 토큰은 인과적 어텐션(causal attention)을 사용합니다.
- Contact Position Dropout: 정규화를 위해 훈련 중 p_{drop} 확률로 접촉 시퀀스에서 position 토큰을 제거하고 link 토큰만 유지합니다. 이는 모델이 다양한 수준의 접촉 정보를 처리하도록 돕습니다.
4. 데이터셋 큐레이션 (Dataset Curation)
DexGYS [36]와 Dexonomy [5] 데이터셋을 활용합니다.
- Physics-based Contact Annotation: MuJoCo 물리 엔진을 사용하여 각 grasp에 대한 접촉 정보를 자동으로 추출합니다. 손 및 객체 모델을 MuJoCo에 로드하고, 각 grasp pose에 대해 정방향 운동학(forward kinematics)을 실행한 다음, 손 링크와 객체가 접촉하는 3D 표면 위치를 물리 버퍼에서 추출합니다.
- Grasp Instruction Annotation (Dexonomy용): Gemma-3 [29] VLM을 사용하여 Dexonomy에 대한 grasp description을 생성합니다. 각 grasp에 대해 여러 시점 이미지를 렌더링하고, 렌더링된 이미지와 접촉 정보에 기반하여 VLM에 프롬프트를 제공합니다. VLM은 객체 범주를 식별하고, 접촉된 기능적 부분을 추론하며, 텍스트 형태의 grasp description을 생성합니다.
실험 및 결과 (Experiments and Results)
DextER는 DexGYS validation set에서 언어 조건부 dexterous grasp 생성 task를 평가했습니다.
- DexGYS 벤치마크: DextER는 67.14%의 grasp 성공률을 달성하여 이전 SOTA보다 3.83%p 우수합니다. P-FID (Fréchet Distance) 점수 0.20을 기록하여 이전 SOTA인 DexGYSNet [36]의 5.60 대비 96.4%의 의도 정렬(intention alignment) 개선을 보였습니다. 이는 생성된 grasp가 언어로 지정된 task 의도와 훨씬 더 잘 일치함을 나타냅니다.
- Embodied Reasoning (ER)의 역할: ER이 없는 모델(w/o ER)은 P-FID가 0.20에서 0.30으로 증가(50% 성능 저하)하고, 성공률은 67.14%에서 62.37%로 감소하는 등 성능이 크게 저하되었습니다. 이는 명시적인 접촉 예측이 의도 정렬 및 물리적 품질 모두에 중요함을 보여줍니다.
- Ablation Study (Table 2):
- ECoT: ECoT를 제거하면 P-FID와 성공률 모두 크게 저하됩니다.
- Token discretization granularity: Action 및 position 토큰 모두 N_a = N_{pos} = 256 bins이 최적의 성능을 보였습니다.
- Contact position dropout (p_{drop}): p_{drop} = 0.5가 가장 좋은 성능을 보이며, 적절한 dropout이 정규화 효과를 제공함을 확인했습니다.
- Point Cloud Encoder: PartField [22]가 Uni3D [49]보다 우수한 성능을 보였는데, 이는 PartField의 파트 인지 특징 추출이 접촉 기반 추론에 자연스럽게 부합하기 때문입니다.
- Zero-Shot Generalization (Table 3, 상단): Dexonomy 데이터셋에서 훈련 및 평가를 진행했으며, DextER는 “Unseen Objects”, “Unseen Grasp Taxonomy”, “Unseen Both”를 포함한 모든 zero-shot 시나리오에서 기준선(baseline) 방법론들을 능가했습니다.
- Steerable Grasp Generation (Table 3, 하단): DextER의 autoregressive 특성을 활용하여 사용자가 부분적인 ECoT 시퀀스를 제공함으로써 grasp 생성을 제어할 수 있습니다. 1개에서 5개까지의 링크를 지정했을 때, 지정된 링크의 수가 많을수록 의도 정렬(P-FID, CD)과 성공률이 모두 향상되는 것을 확인했습니다.
- Contact Reasoning Quality (Table 4): 접촉 링크 예측을 위한 IoU, Precision, Recall, F1 및 공간 정확도를 위한 Position Accuracy (1cm 임계값)를 평가한 결과, 만족스러운 성능을 보여 접촉 기반 embodied reasoning의 정확성을 입증했습니다.
결론 (Conclusion)
DextER는 접촉 예측을 통해 embodied reasoning을 활용하는 언어 조건부 dexterous grasp 생성에 대한 새로운 접근 방식을 제시합니다. 본 방법론은 DexGYS에서 67.14%의 grasp 성공률을 달성하며 이전 SOTA 대비 3.83%p 우수한 성능을 보였고, 의도 정렬에서는 96.4%의 괄목할 만한 개선을 이루었습니다. 이는 접촉 추론이 task semantics를 이해하고 다양하고 안정적인 grasp 구성을 생성하는 데 중요하다는 것을 보여줍니다. 또한, autoregressive 생성 프레임워크는 사용자가 부분적인 접촉 제약 조건을 지정하여 모델을 안내할 수 있는 steerable grasp generation을 가능하게 하여, grasp 생성에 대한 세밀한 제어를 제공합니다.
제한사항 (Limitations)
Autoregressive 프레임워크는 compounding errors에 취약하며, 현재 평가는 단일의 정적 객체에 초점을 맞추고 있어 실제 복잡한 장면에서의 적용에 한계가 있습니다. 또한, 순차적인 토큰 예측 방식은 실시간 성능에 제약을 줄 수 있습니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
1. 서론: 왜 로봇의 손은 아직도 서툰가?
인간의 손은 놀랍도록 유연하다. “머그잔을 손잡이 잡아서 따라줘”라는 말 한마디에 우리는 엄지와 검지를 손잡이 곡면에 맞게 감싸고, 나머지 손가락으로 안정감을 더하며, 손목 각도까지 자연스럽게 조정한다. 이 모든 것이 순식간에, 의식하지 않아도 일어난다.
다관절 로봇 손(dexterous hand)에게 같은 일을 시키면 어떨까? 20개 이상의 자유도(DOF)를 동시에 제어해야 하고, 물체의 3D 형상을 파악해야 하고, “손잡이를 잡으라”는 언어 지시를 물리적 접촉 패턴으로 변환해야 한다. 이것이 언어 기반 정교 파지(language-driven dexterous grasp generation) 문제다.
1.1 기존 접근의 한계
최근 Vision-Language Model(VLM)을 활용한 연구들이 이 문제에 도전해왔다. DexGYSNet, SemGrasp, DexVLG 같은 방법들이 3D 시각 표현과 언어 이해를 융합해 성과를 냈다. 그런데 이들에는 공통적인 문제가 있다.
관찰 → 파지 파라미터 라는 직접 매핑(direct mapping)
언어 지시와 3D 형상을 받아 곧바로 손의 관절 각도와 위치를 출력한다. 중간에 “손이 어디에 닿을 것인가”에 대한 명시적 추론이 없다. 마치 수학 시험에서 풀이 과정 없이 답만 쓰는 것과 같다. 답이 맞을 때도 있지만, 왜 맞는지 설명할 수 없고, 새로운 문제 유형에 취약하다.
1.2 DextER의 핵심 아이디어
POSTECH 연구팀이 제안한 DextER(Dexterous Grasp Generation with Embodied Reasoning)는 이 질문에서 출발한다.
“다관절 손의 물리적 상호작용에서 중간 추론 표현은 무엇이어야 하는가?”
그 답은 접촉점(contact)이다. “어떤 손가락 링크가 물체의 어떤 위치에 닿는지”를 먼저 예측하고, 그것을 발판 삼아 최종 파지 자세를 생성한다.
직관적으로 생각해보자. 사람도 마찬가지다. 가위를 잡을 때 우리는 무의식적으로 “집게손가락과 중지가 고리에 들어가야 한다”는 접촉 계획을 먼저 세운다. DextER는 이 자연스러운 추론 과정을 모델에 명시적으로 집어넣는다.
이것이 바로 Embodied Chain-of-Thought(ECoT) — 로봇 신체의 물리적 구조를 반영한 사고의 연쇄다.
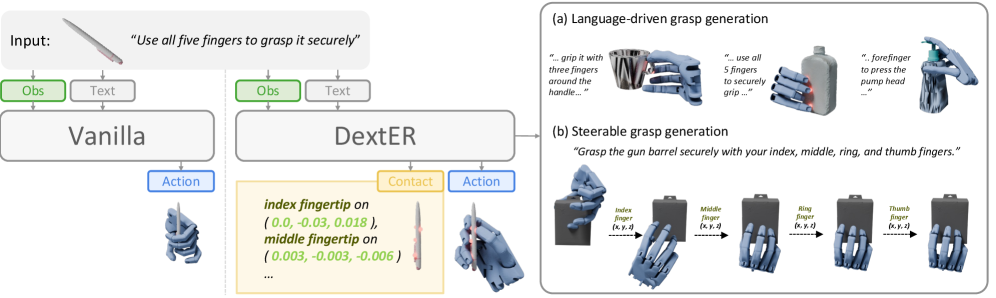
DextER 개요: 3D 객체와 언어 지시가 주어지면, 어떤 손가락 링크가 물체의 어디에 접촉하는지를 먼저 자기회귀적으로 예측한 뒤 이를 발판으로 파지 자세를 생성한다(contact-based embodied reasoning).
2. 방법론: DextER 아키텍처 해부
2.1 문제 공식화
수학적으로 표현하면 DextER가 풀려는 문제는 다음과 같다.
입력: 물체의 3D 포인트 클라우드 \mathbf{P} \in \mathbb{R}^{N \times 3}, 언어 지시 \mathbf{T}
출력: 손의 파지 자세 \mathbf{a} \in \mathbb{R}^D (D=28, 팜 포즈 + 관절 각도)
기존 방법이 p(\mathbf{a} \mid \mathbf{P}, \mathbf{T})를 직접 모델링한다면, DextER는 이를 두 단계로 분해한다:
p(\mathbf{a}, \mathcal{C} \mid \mathbf{P}, \mathbf{T}) = \underbrace{p(\mathcal{C} \mid \mathbf{P}, \mathbf{T})}_{\text{접촉 추론}} \cdot \underbrace{p(\mathbf{a} \mid \mathcal{C}, \mathbf{P}, \mathbf{T})}_{\text{파지 생성}}
여기서 \mathcal{C} = \{(l_i, \mathbf{p}_i)\}는 접촉 집합으로, l_i는 손 링크 이름, \mathbf{p}_i \in \mathbb{R}^3는 물체 표면 위 접촉 위치다.
이 분해가 왜 강력한가? 접촉 패턴 \mathcal{C}가 “언어 의미”와 “물리적 제약” 사이의 다리 역할을 하기 때문이다. “손잡이를 잡아라”는 말이 → “thumb_base, ff_distal이 handle 부위에 접촉” → 구체적인 관절 각도로 자연스럽게 이어진다.
2.2 전체 아키텍처
DextER는 세 모듈로 구성된다.
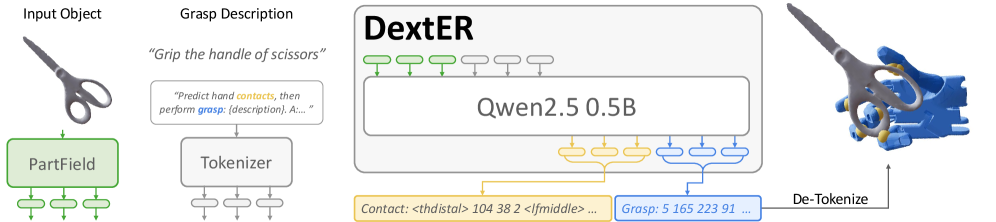
DextER 모델 아키텍처. 입력 포인트 클라우드는 PartField 인코더와 MLP 프로젝터를 거쳐 시각 토큰이 되고, 언어 토큰과 함께 Qwen2.5-0.5B 백본에 입력되어 접촉 토큰과 액션 토큰을 순차적으로 생성한다.
① 3D 비전 인코더: PartField
포인트 클라우드를 처리하는 데 PartField를 선택한 이유가 흥미롭다. PartField는 2D SAM 마스크와의 대조 학습(contrastive learning)으로 사전학습된 파트-분할 인식 3D 인코더다. 글로벌 오브젝트 특징이 아닌, 로컬 파트 기하학 특징을 추출한다.
왜 중요한가? DextER의 접촉 추론은 “어느 파트에 닿는가”를 예측해야 한다. 손잡이(handle), 뚜껑(lid), 버튼 등 세부 파트를 잘 인식하는 특징이 접촉점 예측에 직접 도움이 된다. Ablation 결과에서도 Uni3D 대비 P-FID 0.52→0.20, 성공률 59.07%→67.14%로 압도적 차이를 보인다.
인코더 출력은 triplane feature map에서 다운샘플링된 768개의 시각 토큰이다.
② 액션 토크나이제이션
연속적인 파지 파라미터를 이산 토큰으로 변환하는 과정이다.
- 각 28개 차원에 대해 1~99 퍼센타일 값을 [-1, 1]로 정규화
- 각 차원을 N_\mathbf{a} = 256 개 균등 구간으로 분할
- 각 구간에 고유 토큰
⟨action_bin_i⟩할당
따라서 하나의 파지 자세는 28개의 이산 토큰 시퀀스로 표현된다.
왜 연속값 대신 토큰인가? LLM의 next-token prediction 목적함수를 그대로 사용할 수 있기 때문이다. 별도의 회귀 헤드 없이 기존 VLM 학습 파이프라인을 재활용한다.
③ 접촉 표현 (Contact Tokens)
접촉 정보는 다음 형식으로 토큰화된다:
⟨|contact_start|⟩
⟨thbase⟩⟨px⟩⟨py⟩⟨pz⟩ ← 엄지 밑동이 (px,py,pz)에 닿음
⟨ffdistal⟩⟨px⟩⟨py⟩⟨pz⟩ ← 검지 끝마디가 (px,py,pz)에 닿음
⟨mfmiddle⟩⟨px⟩⟨py⟩⟨pz⟩ ← 중지 중간마디가 (px,py,pz)에 닿음
⟨|contact_end|⟩위치 좌표는 N_{\text{pos}} = 256 개 빈으로 이산화된다. 링크 이름 토큰과 위치 토큰 모두 사전학습된 토크나이저의 vocabulary에 특수 토큰으로 추가된다.
2.3 하이브리드 어텐션 메커니즘
트랜스포머 어텐션 설계에서 영리한 선택이 있다.
- 포인트 클라우드 토큰: 양방향(bidirectional) 어텐션 → 전체 3D 형상에 대한 글로벌 컨텍스트 파악
- 언어 및 액션 토큰: 인과적(causal) 어텐션 → 표준 자기회귀 생성 유지
이 설계는 직관적이다. 물체의 형상은 “전체”를 동시에 봐야 이해할 수 있다. 반면 텍스트와 액션은 순서가 중요하다. 두 특성을 혼합했다.
2.4 메타-프롬프트와 접촉 위치 드롭아웃
메타-프롬프트: 모델이 접촉 추론을 먼저 수행하도록 유도하는 프롬프트. 예시:
> “Think step by step: first predict which links contact where on the object, then predict the grasp pose”
학습 시 다양한 표현의 메타-프롬프트를 사용해 특정 문구에 과적합되는 것을 방지한다.
접촉 위치 드롭아웃: 학습 시 확률 p_{\text{drop}} = 0.5로 위치 토큰 \langle p_{ix} \rangle \langle p_{iy} \rangle \langle p_{iz} \rangle를 제거하되, 링크 토큰 \langle l_i \rangle는 유지한다.
이것이 왜 필요한가? 두 가지 효과가 있다. 첫째, 과적합 방지. 둘째, Steerable Generation 활성화 — 추론 시 사용자가 링크만 지정하거나, 링크+위치를 부분 지정하여 모델 완성을 유도할 수 있게 된다.
2.5 데이터셋 큐레이션: MuJoCo + VLM 자동 주석
DextER의 학습에는 두 데이터셋을 사용한다:
| 데이터셋 | 특징 | DextER에서의 역할 |
|---|---|---|
| DexGYS | 1,800개 객체, 50,000 파지-언어 쌍 | 스케일과 언어 다양성 제공 |
| Dexonomy | 31가지 파지 분류체계 (power grasp, precision pinch 등) | 구조화된 파지 변형 제공 |
두 데이터셋 모두에 접촉 주석이 없었기 때문에, MuJoCo 물리 엔진으로 자동 생성했다:
- 손과 물체 모델을 MuJoCo에 로드
- Forward kinematics 실행
- 물리 버퍼에서 접촉 데이터 추출 → 어떤 링크가 어디에 닿는지 획득
MuJoCo 물리 엔진 기반 접촉 주석 예시. 각 파지 자세에 대해 forward kinematics를 실행하고 손 링크와 물체 표면이 맞닿는 3D 접촉 위치를 자동으로 추출한다.
Dexonomy는 언어 설명이 없어서, Gemma VLM으로 자동 생성했다: 1. 각 파지에 대해 5개 멀티뷰 이미지 렌더링 2. VLM에 렌더링 + 접촉 해부학 정보를 프롬프트로 입력 3. 객체 카테고리, 접촉 기능부위(handle, rim 등), 파지 설명 텍스트 생성
이 파이프라인으로 대규모 학습 데이터를 완전 자동으로 구축했다는 점이 실용적으로 중요하다.
3. 실험: 숫자로 확인하는 DextER의 성능
3.1 구현 세부사항
- 시각 인코더: PartField (사전학습 가중치 고정)
- LLM 백본: Qwen2.5-0.5B (Qwen2.5 패밀리 최소 모델)
- 시각 프로젝터: 2-layer MLP
- 학습: AdamW, lr=1e-4, cosine decay, batch=64, 100K iterations
- 하드웨어: NVIDIA A6000 GPU × 8
- 시뮬레이션: DexGYS는 Isaac Gym, Dexonomy는 MuJoCo(DexGraspBench)
주목할 점: 0.5B 파라미터 소형 LLM을 사용했음에도 SOTA를 달성했다. 모델 크기보다 추론 구조 설계가 더 중요하다는 메시지다.
3.2 DexGYS 벤치마크 결과
평가 지표 해설: - P-FID ↓: 생성된 파지와 참조 파지의 포인트 클라우드 특징 분포 Fréchet 거리. 낮을수록 의도 정렬이 좋음 - CD ↓: Chamfer Distance, 손 메시 형상 차이 - Con. ↓: 접촉 맵 L2 거리 - Success ↑: Isaac Gym 시뮬레이션 성공률 - Q₁ ↑: Force-closure 품질 (파지 안정성) - Pen. ↓: 손-물체 침투 깊이 - δt, δr, δq ↑: 생성 다양성 (위치, 회전, 관절)
| 방법 | P-FID↓ | CD↓ | Con.↓ | 성공률↑(%) | Q₁↑ | Pen.↓ | δt↑ | δr↑ | δq↑ |
|---|---|---|---|---|---|---|---|---|---|
| GraspCVAE | 29.02 | 3.14 | 0.96 | 29.12 | 0.54 | 0.55 | 0.18 | 1.76 | 0.18 |
| GraspTTA | 33.15 | 12.19 | 1.11 | 43.46 | 0.71 | 0.19 | 2.11 | 6.15 | 3.87 |
| SceneDiffusers | 7.93 | 1.68 | 0.45 | 62.24 | 0.83 | 0.25 | 0.35 | 3.46 | 0.39 |
| DGTR | 15.77 | 2.90 | 0.78 | 51.91 | 0.78 | 0.16 | 2.05 | 14.01 | 4.30 |
| DexGYSNet | 5.60 | 1.20 | 0.36 | 63.31 | 0.83 | 0.22 | 6.12 | 55.68 | 6.12 |
| DextER (w/o ER) | 0.30 | 1.95 | 0.40 | 62.37 | 0.66 | 0.44 | 8.78 | 77.13 | 13.77 |
| DextER | 0.20 | 1.46 | 0.34 | 67.14 | 0.89 | 0.37 | 8.84 | 77.98 | 13.63 |
결과 해석:
가장 눈에 띄는 수치는 P-FID 0.20이다. 이전 SOTA DexGYSNet의 5.60 대비 96.4% 향상이다. 이는 DextER가 생성한 파지가 언어 지시가 의도하는 파지 분포와 훨씬 더 잘 일치한다는 뜻이다.
성공률도 63.31% → 67.14% (3.83%p 향상)로 개선되었다. 단순히 “어떻게 잡는가”만이 아니라 “잘 잡히는가”도 동시에 개선되었다.
ECoT 제거 실험(w/o ER)이 더 흥미롭다. ECoT 없이도 P-FID 0.30, 성공률 62.37%로 DexGYSNet을 넘어선다. 이는 VLA 아키텍처 자체(PartField + Qwen2.5)의 기여도다. 그러나 ECoT를 추가하면 P-FID가 0.30→0.20 (33% 추가 개선), 성공률 62.37%→67.14% 향상. 접촉 추론이 아키텍처 개선 위에 의미 있는 추가 기여를 한다.
다양성 지표도 주목할 만하다. δr이 77.98로 이전 방법 대비 압도적으로 높다. 같은 지시에 대해 다양한 파지 전략을 생성할 수 있다는 것은 실제 배포 환경에서 중요하다.
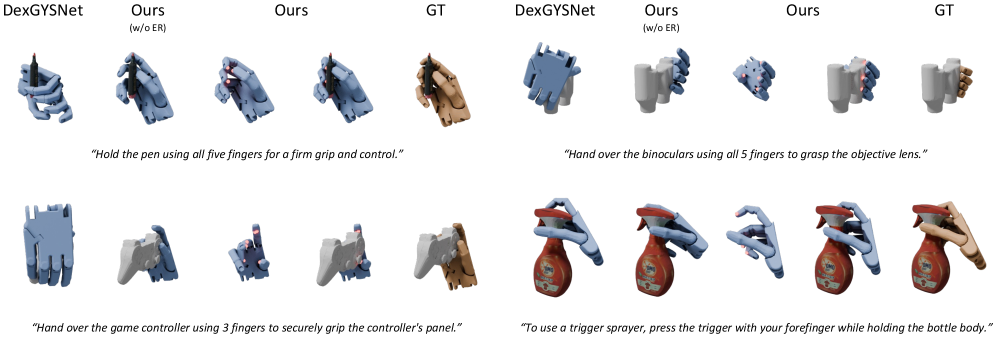
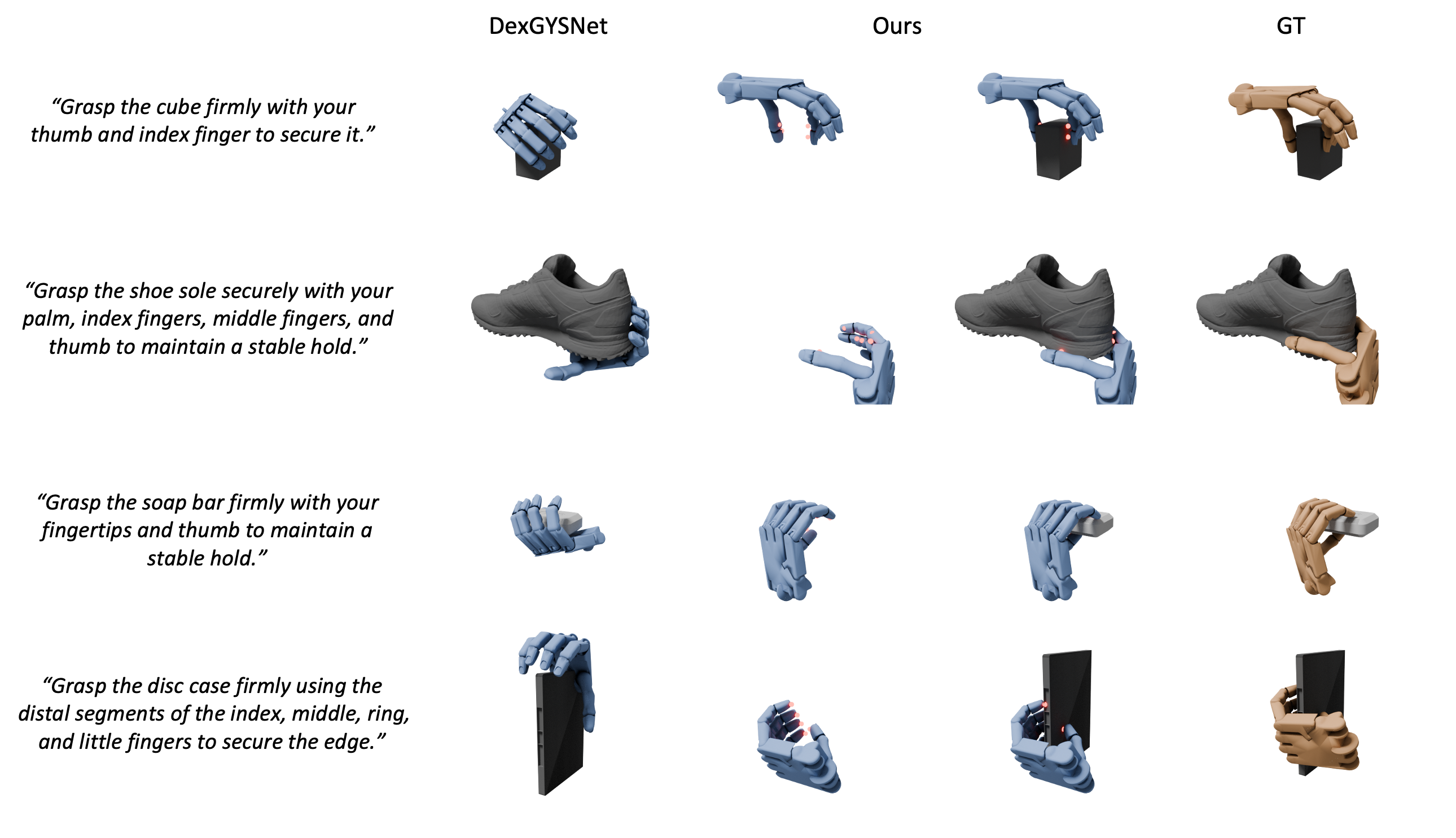
언어 조건부 정교 파지 생성의 정성 결과. 객체 포인트 클라우드와 자연어 지시가 주어지면 DextER는 접촉 예측(색 점)과 이에 부합하는 파지 자세를 함께 생성한다.
3.3 Ablation Study
xychart-beta
title "P-FID (낮을수록 좋음) - Ablation 비교"
x-axis ["w/o ECoT", "ECoT(기본)", "Na=128", "Na=256", "Na=512", "Npos=128", "Npos=256", "pdrop=0.0", "pdrop=0.5", "pdrop=1.0", "Uni3D", "PartField"]
y-axis "P-FID" 0 --> 0.6
bar [0.30, 0.20, 0.21, 0.20, 0.26, 0.21, 0.20, 0.22, 0.20, 0.30, 0.52, 0.20]
| 설계 선택 | 기본값 | 핵심 발견 |
|---|---|---|
| ECoT | 활성화 | 없으면 P-FID +50%, 성공률 -4.77%p |
| Action bin (N_\mathbf{a}) | 256 | 128은 정밀도 손실, 512는 어휘 복잡도 증가로 성능 저하 |
| Position bin (N_{\text{pos}}) | 256 | 동일 패턴. “Goldilocks” 256이 최적 |
| Contact position dropout (p_{\text{drop}}) | 0.5 | 과소(0.0)는 일반화 약화, 과다(1.0)는 ECoT 효과 소멸 |
| 포인트 클라우드 인코더 | PartField | Uni3D 대비 P-FID 0.52→0.20, 성공률 +8.07%p |
특히 인코더 선택의 영향이 ECoT보다 크다는 점이 실용적으로 중요하다. 파트-인식 기하학 표현이 접촉 기반 추론과 잘 맞물린다는 것을 Ablation이 명확히 보여준다.
3.4 제로샷 일반화 (Dexonomy 데이터셋)
DextER가 학습 시 못 본 객체와 파지 유형에 어떻게 대처하는지 확인하기 위해 4가지 분할로 테스트했다.
| 분할 | P-FID↓ | 성공률↑(%) |
|---|---|---|
| Seen Obj. & Grasp | 0.44 | 12.24 |
| Unseen Obj. | 1.44 | 10.86 |
| Unseen Grasp Taxonomy | 1.04 | 9.10 |
| Unseen Both | 1.23 | 8.41 |
비교 기준인 DexGYS 방법은 “Seen” 조건에서도 P-FID 1.89, 성공률 0.97%로 훨씬 낮다. DextER는 모든 조건에서 압도적으로 우수하다.
흥미로운 패턴: 새로운 객체보다 새로운 파지 유형(taxonomy) 에 대한 일반화가 더 어렵다. 이는 직관적으로 말이 된다 — 새 물체라도 비슷한 형상이 있지만, 전혀 다른 파지 전략(예: 새로운 precision manipulation)은 근본적으로 다른 접촉 패턴을 요구한다.
Dexonomy 데이터셋에서의 제로샷 정성 결과. 학습 시 보지 못한 객체와 파지 분류체계에 대해서도 다양한 파지 변형을 생성한다.
3.5 Steerable Generation: “원하는 대로 잡기”
DextER의 가장 독창적인 기능 중 하나다. 자기회귀 생성의 특성을 활용해, 부분 접촉 명세를 prefix로 제공하면 모델이 나머지를 완성한다.
예: 사용자가 “엄지와 검지가 여기에 닿아야 해”라고 지정하면, 모델이 나머지 손가락의 접촉과 전체 파지 자세를 생성한다.
| 지정 링크 수 | P-FID↓ | CD↓ | 성공률↑(%) |
|---|---|---|---|
| 0 (자유 생성) | 0.44 | 18.32 | 12.24 |
| 1개 링크 | 0.43 | 5.51 | 10.40 |
| 2개 링크 | 0.28 | 2.33 | 14.67 |
| 3개 링크 | 0.18 | 1.50 | 17.84 |
| 4개 링크 | 0.14 | 0.91 | 20.14 |
| 5개 링크 | 0.12 | 0.73 | 21.35 |
더 많은 제약 → 더 나은 의도 정렬, 그리고 더 높은 성공률. 제약이 실질적인 가이드 역할을 한다는 뜻이다. 정밀 조립이나 특수 도구 사용처럼 “반드시 이렇게 잡아야 하는” 산업 응용에 직접 활용 가능하다.
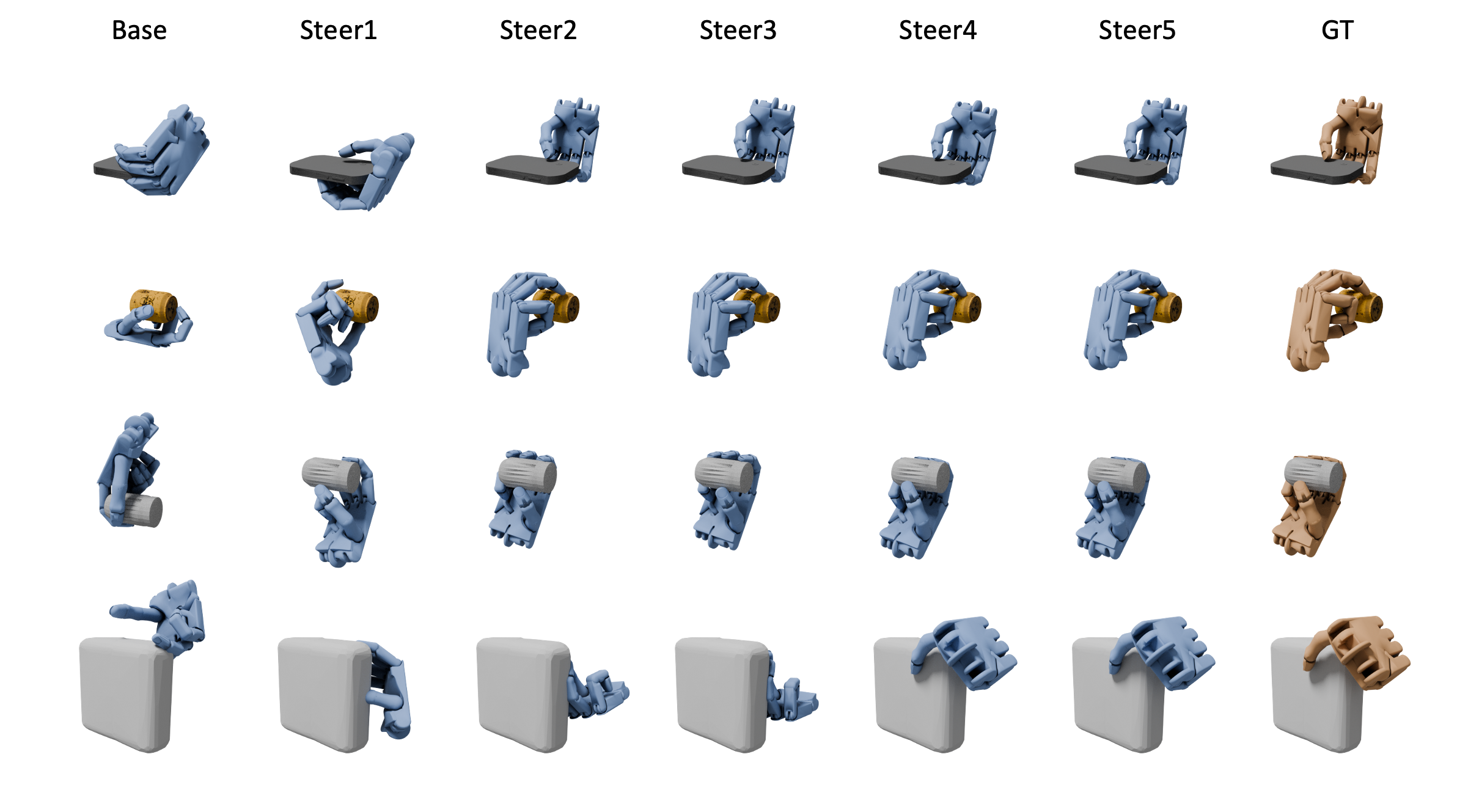
Steerable grasp generation 예시. 사용자가 일부 접촉 링크를 prefix로 지정하면 모델이 나머지 접촉과 전체 파지 자세를 완성하여, 지정 링크 수가 늘수록 의도에 더 부합하는 파지를 생성한다.
3.6 접촉 추론 품질 평가
| 지표 | 값 |
|---|---|
| IoU (링크 예측) | 0.42 |
| Precision | 0.59 |
| Recall | 0.63 |
| F1 | 0.57 |
| Position Accuracy (1cm 이내) | 0.79 |
F1 0.57은 완벽하지 않다. 하지만 위치 정확도 79%는 인상적이다 — 예측한 접촉 위치의 79%가 실제 손 forward kinematics 결과로 계산한 링크 위치 1cm 이내에 있다. 이 정도 공간 정밀도면 접촉 추론이 파지 생성에 실질적인 기하학적 가이드를 제공한다는 것을 의미한다.
4. 비판적 고찰: DextER의 강점과 한계
4.1 강점 분석
① 추론 구조의 설계 철학이 올바르다
“입력 → 출력” 직접 매핑의 한계를 인식하고, 로봇공학적으로 의미 있는 중간 표현(접촉점)을 설계했다. 이것은 단순한 엔지니어링 트릭이 아니다. 물리 세계에서 파지가 성공하려면 접촉이 올바래야 한다는 근본 원리를 모델 구조에 직접 인코딩한 것이다.
② 자동화된 대규모 학습 데이터 구축
MuJoCo 기반 접촉 자동 주석, VLM 기반 언어 자동 주석 파이프라인은 확장성이 높다. 새 데이터셋에도 동일 파이프라인을 적용할 수 있다.
③ Steerable Generation의 실용성
산업 현장에서는 종종 “특정 부위를 특정 방식으로 잡아야”하는 제약이 있다. Steerable Generation은 이런 요구사항을 자연스럽게 수용한다. 이것은 VLM 기반 방법의 닫힌 시스템(closed-loop) 문제를 열린 인터페이스로 전환한다.
④ 소형 모델로 SOTA 달성
Qwen2.5-0.5B는 대형 VLM 대비 훨씬 작다. 실시간 로봇 제어에 더 적합한 지연 시간(latency)을 달성할 수 있다.
4.2 한계와 열린 질문들
① Sim-to-Real 갭: 아직 시뮬레이션에 머물다
DextER의 모든 실험은 Isaac Gym과 MuJoCo 시뮬레이션이다. 실제 로봇에 대한 검증이 없다. 실제 센서 노이즈, 물체 표면의 마찰 불균일성, 손 캘리브레이션 오차 등은 시뮬레이션에서 학습한 접촉 패턴을 무효화할 수 있다. 다관절 손의 sim-to-real은 평행 그리퍼보다 훨씬 더 어렵다.
② 접촉 추론의 F1=0.57: 중간 단계의 불완전성
ECoT의 중간 표현(접촉 예측)이 완벽하지 않다. F1 0.57은 약 43%의 경우 잘못된 접촉 링크를 예측한다는 뜻이다. 그럼에도 최종 파지 성능이 좋다면, 이는 모델이 “잘못된 접촉 추론 → 올바른 파지”라는 단락(shortcut)을 학습했을 가능성도 있다. 즉, ECoT가 진정한 추론을 하는지, 아니면 단순 성능 향상 트릭인지 구분하기 어렵다.
③ 새로운 파지 유형에 대한 취약성
Dexonomy 실험에서 unseen grasp taxonomy에 대한 일반화가 제한적이다. 저자들도 “모델이 물체는 잡지만 불안정(shaking)”하다고 인정한다. 파지 분류체계가 다르면 접촉 패턴이 근본적으로 달라지는데, 현재 모델은 이를 제대로 추론하지 못한다.
④ 단일 파지 자세 생성
실제 조작에서는 파지 → 이동 → 조작이라는 시퀀스가 필요하다. DextER는 단일 시점의 파지 자세만을 생성한다. 이 파지가 이후 조작 태스크에 최적인지, 예를 들어 “따르기 위해 잡기”가 “실제로 따르는 동작”에 적합한지는 평가하지 않는다.
⑤ 접촉 드롭아웃 = 불완전한 ECoT
p_{\text{drop}} = 0.5는 절반의 학습 샘플에서 접촉 위치 없이 링크만으로 학습된다는 것을 의미한다. 이는 ECoT의 공간적 추론 능력을 약화시킬 수 있다. Steerable Generation의 편의성과 추론 완전성 사이의 트레이드오프다.
⑥ 단일 손 모델 (ShadowHand)
링크 토큰이 ShadowHand 전용으로 설계되었다. Allegro Hand, LEAP Hand 등 다른 손 플랫폼으로 전이하려면 새로운 링크 토큰과 재학습이 필요하다. Embodiment-agnostic한 설계가 아니다.
5. 관련 연구와의 비교
| 방법 | 패러다임 | 중간 표현 | 의도 정렬 | 물리 품질 | 제어 가능성 |
|---|---|---|---|---|---|
| DexGYSNet | End-to-End | 없음 | 보통 | 좋음 | 없음 |
| DexVLG | End-to-End VLM | 없음 | 좋음 | 좋음 | 없음 |
| AffordDexGrasp | 2단계 | 어포던스 맵 | 좋음 | 좋음 | 제한적 |
| DexGraspVLA | 2단계 + VLA | 계획 텍스트 | 좋음 | 매우 좋음 | 제한적 |
| DextER | End-to-End ECoT | 접촉점 (물리적) | 매우 좋음 | 매우 좋음 | 높음 |
DexGraspVLA와의 비교는 흥미롭다. DexGraspVLA는 89.6%라는 높은 성공률을 보고하지만, 이는 단순 파지(non-prehensile 포함)에 대한 수치이며, 언어-의도 정렬은 명시적으로 측정하지 않는다. DextER는 특히 의도 정렬에서 독보적이다.
6. 요약 및 결론
DextER는 언어 기반 다관절 로봇 파지 생성에서 “중간에서 무엇을 추론할 것인가”라는 근본적 질문을 다룬다. 그 답은 접촉 — 손의 어떤 링크가 물체의 어디에 닿는가 — 이다.
이 아이디어는 단순하지만 강력하다. 언어(“손잡이 잡아”)와 물리(“ff_distal이 handle 부위 3D 좌표에 접촉”)를 연결하는 다리를 명시적으로 학습한다.
핵심 기여 요약: - Contact-based Embodied Reasoning (ECoT): 접촉점을 중간 사고 단계로 사용 - 자동화된 대규모 학습 데이터 구축 파이프라인 (MuJoCo + VLM) - Steerable Generation: 부분 접촉 명세로 파지 가이드 - DexGYS SOTA: 성공률 67.14%, P-FID 96.4% 향상
향후 연구 방향: - 실물 로봇 검증 (sim-to-real) - 다양한 손 플랫폼으로의 전이 (Allegro, LEAP 등) - 접촉 추론과 조작 계획(manipulation planning)의 통합 - 더 강력한 중간 추론 (단순 접촉점 → 접촉력, 접촉 순서)
로봇이 언어를 이해하고 손을 자유자재로 움직이는 날은, 이렇게 차근차근 쌓이는 추론 구조 연구들 위에 세워질 것이다. DextER는 그 길에서 설계 철학을 잘 보여주는 좋은 이정표다.