flowchart TD
A[Coarse Initialization<br/>손 자세 초기값 샘플링] --> B[Energy Function 정의]
B --> C1[Distance Term<br/>접촉 거리 에너지]
B --> C2[Regularization Term<br/>손 자세 규제화]
B --> C3[Force Closure Term<br/>QP 기반 에너지]
C3 --> D[Differentiable QP<br/>Implicit Differentiation]
D --> E[Wrench Matrix 구성<br/>G ∈ R^{6xm}]
E --> F[Singular Value Scaling<br/>e^{-Q} 스케일링]
C1 --> G[Total Energy E_total]
C2 --> G
F --> G
G --> H[MALA* Optimizer]
H --> H1[Dynamic Resetting<br/>에너지 분포 기반 초기화]
H --> H2[Adaptive Temperature<br/>Scaling]
H1 --> I[수렴 그래스프 후보군]
H2 --> I
I --> J[다양하고 물리적으로<br/>안정적인 그래스프 데이터셋]
style C3 fill:#ff9999,stroke:#cc0000
style D fill:#ff9999,stroke:#cc0000
style H fill:#99ccff,stroke:#0066cc
style H1 fill:#99ccff,stroke:#0066cc
style H2 fill:#99ccff,stroke:#0066cc
📃GraspQP 리뷰
qp
grasp
force-closure
diff-opt
Differentiable Optimization of Force Closure for Diverse and Robust Dexterous Grasping
CoRL 2025
- 🤖 본 연구는 다양하고 물리적으로 타당한 덱스터러스 그립을 생성하기 위해 Quadratic Program (QP)을 통해 암묵적으로 정의된 엄격한 미분 가능한 force closure energy 정식을 도입합니다.
- 💡 제안하는 MALA* 최적화 방법은 에너지 값 분포를 기반으로 그라디언트 단계를 동적으로 거부하여, 최적화 중 발생하는 모드 붕괴를 완화하고 보다 폭넓은 그립 다양성을 촉진합니다.
- 🚀 GraspQP는 기존 접근 방식보다 그립 다양성과 예측 안정성에서 크게 향상된 성능을 보여주며, 다양한 그리퍼와 그립 유형을 포함하는 5,700개 객체에 대한 대규모 그립 데이터셋을 제공합니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
GraspQP 논문은 Dexterous Grasping 분야에서 다양하고 견고한 그랩(grasp)을 대규모로 생성하기 위한 새로운 방법론을 제안합니다. 기존의 그랩 데이터셋 생성 방법들은 샘플링 기반 알고리즘이나 단순화된 Force Closure 분석에 의존하여, 주로 파워 그랩(power grasp)에 수렴하고 다양성이 부족하다는 한계가 있었습니다. 본 논문은 이러한 문제점을 해결하고자, Rigorous하고 미분 가능한(differentiable) Force Closure 에너지 함수와 개선된 최적화 기법을 도입하여 정교한 핀치(pinch) 및 쓰리핑거 프리시전(tri-finger precision) 그랩을 포함하는 다양한 그랩 생성을 목표로 합니다.
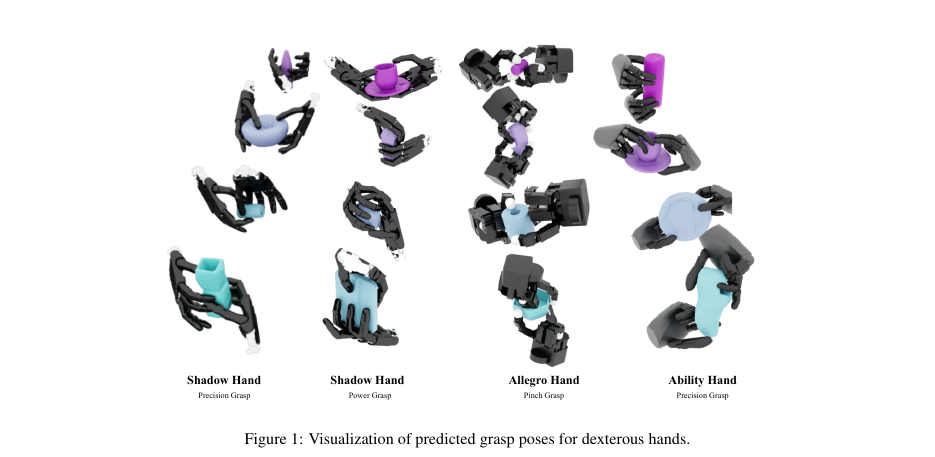
Figure 1: GraspQP가 다양한 덱스터러스 핸드(Shadow Hand, Allegro Hand, Ability Hand)에 대해 생성한 그랩 자세 예시. 정밀(precision), 파워(power), 핀치(pinch) 등 서로 다른 그랩 타입이 모두 포함되어 있습니다.
핵심 방법론 (Core Methodology)
본 논문의 핵심은 그랩의 안정성과 다양성을 동시에 고려하는 최적화 프레임워크에 있습니다. 그랩 최적화는 다음의 에너지 함수를 최소화하는 방식으로 진행됩니다: E = E_{FC} + w_{dis}E_{dis} + w_{reg} E_{reg} 여기서 E_{FC}는 Force Closure Metric, E_{dis}는 접촉점(contact point)이 객체 표면에 얼마나 근접했는지를 나타내는 거리 항, 그리고 E_{reg}는 객체 관통, 자기 간섭, 조인트(joint) 한계 등을 제어하는 정규화(regularization) 항입니다.
엄격하고 미분 가능한 Force Closure Metric (E_{FC}): 기존 DexGraspNet과 같은 방식은 마찰을 무시하거나, Theorem 3.1-(ii)의 \sum \alpha_i v_i = 0 조건을 \alpha_i=1로 단순화하여 Force Closure가 아닌 Form Closure에 가깝게 모델링했습니다. 이는 특정 \alpha_i 값이 임의로 작아질 경우 기울기 소실(vanishing gradients)을 유발할 수 있습니다. 본 논문은 이러한 한계를 극복하기 위해 Theorem 3.1-(iii)에 기반한 더 엄격한 Force Closure Metric을 제안합니다. 이 Metric은 각 접촉점에서의 상호작용 힘을 나타내는 계수 \hat{\gamma}_i를 도입하여 현실적인 힘의 경계를 설정합니다: E_{FC} = || \sum_{i \le |C'|}\hat{\gamma}_i w_i ||^2 \text{ s.t. } u \ge \hat{\gamma}_i \ge 1 여기서 \hat{\gamma}_i는 i-번째 접촉점에서의 상호작용 힘을 나타내는 계수이며, u는 상한을 의미하고 w_i는 i-번째 접촉점의 Wrench(힘과 토크)입니다. 이 공식은 Torque Limits를 가진 실제 로봇에 필요한 Bounded Interaction Forces를 보장합니다.
이러한 제약 조건이 있는 최적화 문제를 미분 가능하게 만들기 위해, 본 논문은 이를 이차 계획법(Quadratic Program, QP)으로 공식화하고 KKT(Karush–Kuhn–Tucker) 조건을 미분하여 Gradient를 계산합니다. QP 공식은 다음과 같습니다: \min_z \frac{1}{2} z^T H z + g^T z \text{ s.t. } A z \ge b 여기서 H = W_{FC}^T W_{FC}, g = 0, b = [1_{N_c}; u \cdot 1_{N_c}], z = [\hat{\gamma}_1, \dots, \hat{\gamma}_{N_c}] 이고, A = \text{diag}(1_{N_c \times N_c}, -1_{N_c \times N_c})는 \hat{\gamma}_i의 하한(\ge 1) 및 상한(\le u) 제약을 인코딩합니다. W_{FC}는 마찰 특성을 반영하는 Contact Wrench Matrix입니다.
또한, Force Closure가 Wrench Space가 \mathbb{R}^6를 선형적으로 스팬(span)하는 것을 의미하므로, Wrench Matrix W_{FC}의 Full Rank를 보장하고 Wrench Space Volume을 극대화하기 위해 Singular Value들의 합을 이용한 항 e^{-\sum_i \sigma_i(W_{FC})}를 E_{FC}에 곱해줍니다. 최종 E_{FC}는 다음과 같습니다: E_{FC} = || \sum_{i \le |C'|}\hat{\gamma}_i w_i ||^2 \cdot e^{-\sum_i \sigma_i(W_{FC})} \text{ s.t. } \hat{\gamma}_i \ge 1
MALA* 최적화 기법 (MALA* Optimization Strategy): 기존 최적화 과정에서 그랩 제안들이 로컬 미니마(local minima)에 갇히거나 모드 붕괴(mode collapse)를 겪는 문제를 해결하기 위해, Metropolis-Adjusted Langevin Algorithm (MALA)에 기반한 MALA를 제안합니다. MALA는 그랩 분포의 현재 에너지 값에 대한 정보를 활용하여 최적화 과정을 동적으로 조정합니다.
- Dynamic Resetting: 특정 그랩이 전체 그랩 분포 대비 현저히 낮은 성능을 보일 경우(즉, 에너지 값이 에너지 분포 N_E(\mu, \sigma)의 가장 낮은 분위수(p_{th})에 속할 경우), 해당 그랩의 최적화 상태를 재초기화하여 로컬 미니마에서 벗어나도록 유도합니다.
- Adaptive Temperature Scaling: Metropolis-Hastings 수용 조건 p \sim e^{-\Delta E / T_i}에서 온도 T_i를 동적으로 조절합니다. 그랩 i의 에너지 E_i가 전체 분포에서 나쁠수록 T_i를 높여, 새로운 그래디언트(gradient) 스텝을 수용할 확률을 증가시킴으로써 탐색(exploration)을 장려합니다: T_i = T \cdot (1 + \Phi_E(E_i)), 여기서 \Phi_E는 누적 분포 함수입니다.
실험 및 결과 (Experiments and Results)
본 논문은 Isaac Lab 시뮬레이션 환경에서 5,700개의 객체와 5가지 다른 Gripper (Psyonic Ability Hand, Shadow Hand, Allegro Hand, Robotiq2f140, Robotiq3F)를 사용하여 제안된 방법론을 평가합니다. 주요 평가 지표는 Unique Grasp Rate (UGR)와 Entropy (H)입니다. UGR은 생성된 고유하고 안정적인 그랩의 비율을 나타내며, H는 그랩 구성의 다양성을 측정합니다. 그랩의 안정성은 객체에 6가지 방향으로 힘을 가했을 때 객체의 CoM(Center of Mass)이 3cm 반경 내에 유지되는지를 기준으로 평가합니다.
결과적으로 GraspQP는 기존의 DexGraspNet, GenDexGrasp, TDG, MultiGripperDataset 등 모든 Baseline 방법론들을 UGR과 H 측면에서 일관적으로 능가하는 성능을 보였습니다. 특히, 접촉점 수가 많아질수록 성능 향상 폭이 더 두드러졌으며, 이는 본 방법론이 복잡한 다지(multi-fingered) 핸드에 더 효과적임을 시사합니다. MALA* 최적화 기법 또한 그랩의 UGR과 H를 향상시키는 데 기여함을 확인했습니다. Ablation 연구를 통해 MALA*의 Dynamic Resetting과 Adaptive Temperature Scaling이 다양성 및 안정성 향상에 중요한 역할을 하며, 제안된 QP 기반의 엄격한 Force Closure Formulation이 성능에 필수적임을 입증했습니다.
계산 비용 측면에서는 기존 Baseline보다 1.5~3배 느리지만 (Shadow Hand의 경우 그랩당 3.4초 vs 1.15초), 이는 오프라인 데이터셋 생성에는 허용 가능한 수준으로 간주됩니다. 또한, 더 적은 초기 시드(seed) 수로도 더 많은 고유 그랩을 달성하며 다양성 측면에서 효율적임을 보여주었습니다.
결론 및 한계 (Conclusion and Limitations)
GraspQP는 엄격한 미분 가능한 Force Closure 에너지 공식과 MALA* 최적화 전략을 통해 다양한 객체와 로봇 그리퍼에 대해 다양하고 안정적인 그랩을 효과적으로 생성하는 방법을 제공합니다. 이 방법론은 기존 접근 방식보다 그랩의 안정성과 엔트로피(다양성) 모두에서 우수한 성능을 보여주며, 대규모의 고품질 그랩 데이터셋 생성을 가능하게 합니다.
하지만 다음과 같은 한계점도 존재합니다.
- 계산 복잡성: 최적화 기반 공식은 기존 방법보다 계산 비용이 높아 실시간 애플리케이션이나 강화 학습(Reinforcement Learning, RL)의 보상 함수로 직접 사용하기에는 제한적일 수 있습니다. (향후 ADMM Solver를 이용한 GPU 가속화가 잠재적 해결책으로 언급).
- 모드 붕괴 문제: 여러 그랩이 유사한 형태로 수렴하는 모드 붕괴가 여전히 발생할 수 있습니다. 밀도 기반 반발력(density-based repulsion force)과 같은 시도에도 불구하고 해결이 더 필요합니다.
- 시뮬레이션 환경의 제약: Isaac Sim 물리 엔진에서 간헐적으로 발생하는 손가락 끝과 객체 표면의 관통 현상은 그랩 평가의 False Positive를 유발할 수 있습니다.
향후 연구는 이 프레임워크를 동적 조작(dynamic manipulation) 시나리오로 확장하고, 생성된 데이터셋을 기반으로 딥러닝 모델을 훈련하는 것을 포함합니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
왜 이 논문이 중요한가 — 문제의 핵심 파악
로봇 손이 물건을 잡는다는 건 단순해 보이지만, 사실 그 속에는 수십 년간 해결되지 않은 문제들이 뒤엉켜 있다. 특히 다지 손(dexterous hand) 을 다루는 연구자들이 공통적으로 맞닥뜨리는 벽이 있는데, 바로 “다양하고(diverse) 물리적으로 안정적인(physically stable) 그래스프 데이터를 어떻게 대규모로 생성하느냐”의 문제다.
생각해보자. 당신이 볼펜을 집을 때, 어떻게 잡을지는 상황마다 다르다. 글을 쓸 때는 세 손가락으로 정밀하게 집고, 멀리 던지려면 주먹으로 감싸 쥔다. 이 차이가 바로 robotics에서 말하는 precision grasp(정밀 그래스프) 와 power grasp(파워 그래스프) 의 차이다. 지금까지 대부분의 데이터셋 생성 방법들은 파워 그래스프에 편향되어 있었다 — 이유가 있다. 파워 그래스프는 찾기 쉽다. 많은 접촉점이 물체를 감싸면 대충 잡아도 안정적이니까.
이 논문, GraspQP (René Zurbrügg, Andrei Cramariuc, Marco Hutter / ETH Zürich, CoRL 2025)는 이 편향 문제를 정면으로 돌파한다. 핵심 아이디어를 한 문장으로 요약하면:
Force closure 조건을 Quadratic Program(QP)으로 수식화하고, 이 QP를 미분 가능하게 만들어 gradient-based 최적화로 다양하고 물리적으로 타당한 그래스프를 생성한다.
이게 왜 새로운가를 이해하려면, 먼저 기존 방법들이 왜 실패했는지를 알아야 한다.
배경: Force Closure란 무엇이고, 왜 측정하기 어려운가
Force Closure의 물리적 직관
로봇이 물체를 “안전하게” 잡았다는 건 무슨 의미일까? 가장 엄밀한 정의는 force closure 다 — 외부에서 어떤 방향으로 힘이 가해져도, 접촉점들이 생성하는 마찰력과 법선력의 조합으로 그 힘을 상쇄할 수 있는 상태를 말한다.
수학적으로는 다음과 같이 표현된다:
\text{A grasp is force-closure if} \quad \forall \mathbf{f}_0 \in \mathbb{R}^6, \exists \mathbf{x} \in \mathcal{FC} \text{ s.t. } \mathbf{G}\mathbf{x} = \mathbf{f}_0
여기서: - \mathbf{G} \in \mathbb{R}^{6 \times m} 는 Grasp Matrix (각 접촉점의 wrench를 물체 중심 좌표계로 매핑)
- \mathbf{x} \in \mathcal{FC} 는 마찰 원뿔(friction cone) 내의 접촉력 벡터
- m 은 전체 접촉력 자유도
직관적으로 말하면: grasp matrix의 열벡터들이 생성하는 wrench space가 \mathbb{R}^6 전체를 덮을 수 있어야 한다. 즉, Wrench Space가 원점을 내부에 포함하는 볼록 다면체를 형성해야 한다.
Force Closure 조건 시각화 (2D 단순화):
접촉점 1 (좌측) 접촉점 2 (우측)
F1 -> [ OBJECT ] <- F2
/ \
/ Wrench \
/ Space가 \
/ 원점 포함 \
=> 어떤 방향의 외력도 F1, F2의 조합으로 상쇄 가능
=> Force Closure!왜 기존 방법들이 다양성(Diversity)을 잃는가
기존 접근법들의 문제를 두 가지로 분류할 수 있다:
1. 샘플링 기반 방법 (Sampling-based)
GraspIt! 같은 툴이 대표적이다. 무작위로 접촉점을 샘플링하고, force closure를 체크한다. 문제는 탐색 공간이 엄청나게 넓고, force closure를 만족하는 구성은 드물기 때문에 파워 그래스프로 수렴하는 경향이 있다. 많은 손가락이 물체를 감싸는 파워 그래스프는 거의 어디서나 force closure를 만족하므로, 샘플러가 그것만 계속 찾게 된다.
2. 미분 가능한 근사 방법 (Differentiable Approximation)
DexGraspNet, Liu et al. (RA-L 2021) 같은 최근 방법들은 force closure의 미분 가능한 근사치를 사용하여 gradient descent로 그래스프를 최적화한다. 그런데 여기서 “근사”가 핵심 문제다. 예를 들어, wrench space의 부피를 측정하는 Q_1 메트릭을 softmax나 convex relaxation으로 근사하면 원래 물리적 조건이 약화된다. 그 결과, 최적화는 형식적으로는 통과하지만 실제로 잡으면 흔들리는 그래스프를 생성하거나, 손가락이 물체 안으로 파고드는(penetration) 그래스프가 나온다.
GraspQP가 해결하려는 것이 바로 이것이다: 물리적 조건을 타협 없이 유지하면서도 미분 가능하게 만들기.
방법론: GraspQP의 아키텍처와 핵심 기여
GraspQP의 구조를 전체적으로 조망하면 다음과 같다:
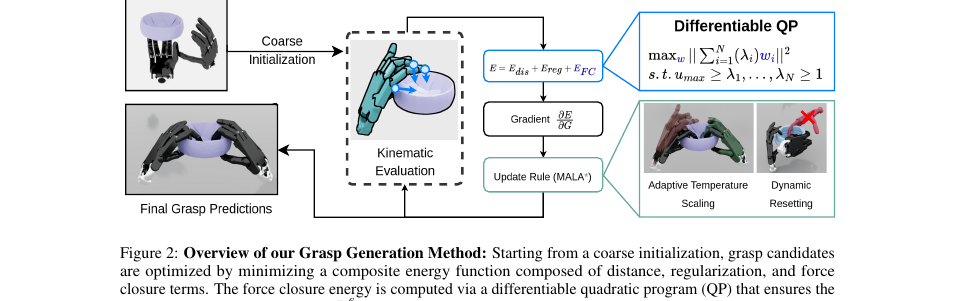
Figure 2: GraspQP의 그랩 생성 파이프라인 개요. Coarse Initialization에서 시작해 거리, 정규화, force closure 항으로 구성된 복합 에너지 함수를 최소화하며, force closure 에너지는 미분 가능한 QP로 계산되고 MALA* 업데이트 규칙(Adaptive Temperature Scaling, Dynamic Resetting)으로 최적화됩니다.
핵심 기여 1: Differentiable Force Closure Energy via QP
이 논문의 가장 중요한 기여는 force closure 조건을 암묵적(implicit) QP로 수식화하고, 이를 통해 미분 가능한 에너지 항을 유도한 것이다.
Wrench Matrix 구성
먼저 각 접촉점 i에서, 마찰 원뿔을 다면체 근사(polyhedral approximation)로 표현한다. 마찰 계수 \mu가 주어지면, 마찰 원뿔 내에 K개의 극선(extreme rays)을 배치하여 마찰력을 표현한다. 이를 통해 각 접촉점마다 K개의 wrench 기저벡터가 생성되고, 이를 열로 쌓아 Wrench Matrix \mathbf{G} \in \mathbb{R}^{6 \times m}를 구성한다.
\mathbf{G} = [\mathbf{w}_1^1, \mathbf{w}_1^2, \ldots, \mathbf{w}_1^K, \mathbf{w}_2^1, \ldots, \mathbf{w}_n^K]
여기서 \mathbf{w}_i^k는 접촉점 i의 k번째 마찰 원뿔 극선에 의한 wrench (force + torque).
Force Closure를 QP로 표현
Force closure 조건은 다음 QP가 feasible한지 여부로 확인된다:
\min_{\boldsymbol{\alpha}} \|\mathbf{G}\boldsymbol{\alpha}\|^2 \quad \text{s.t.} \quad \boldsymbol{\alpha} \geq 0, \quad \sum_i \alpha_i = 1
이 QP가 \mathbf{G}\boldsymbol{\alpha} = \mathbf{0}의 솔루션을 가진다면(즉, \boldsymbol{\alpha} > 0으로 zero resultant wrench를 생성할 수 있다면), 그 그래스프는 force closure를 만족한다. 핵심 아이디어는 이 QP의 최적값(minimum value)을 에너지 함수로 사용하는 것이다:
E_{FC}(\theta) = \min_{\boldsymbol{\alpha} \geq 0, \sum \alpha_i = 1} \|\mathbf{G}(\theta)\boldsymbol{\alpha}\|^2
- E_{FC} = 0이면 force closure 달성
- E_{FC} > 0이면 force closure 미달성 — 그 크기가 “얼마나 부족한가”의 척도
미분 가능성(differentiability): QP의 최적값은 파라미터 \theta (손 자세, 관절각)에 대해 미분 가능하다. 이는 KKT 조건의 Implicit Function Theorem을 통해 이루어진다. QP는 cvxpylayers 또는 differentiable optimization 프레임워크로 구현 가능하며, 역전파 시 \frac{\partial E_{FC}}{\partial \theta}를 효율적으로 계산할 수 있다.
Implicit Differentiation of QP:
Forward: theta -> G(theta) -> QP solve -> E_FC
Backward: dE_FC/d_theta via KKT conditions
(체인 룰로 G의 Jacobian을 통해 전파)Wrench Matrix Rank 보장: Singular Value Scaling
여기서 추가적인 기술적 세부사항이 있다. Force closure는 단순히 \mathbf{G}가 full row rank (rank 6)인 것만으로는 부족하고, wrenches가 \mathbb{R}^6 전체를 양수 span 해야 한다.
논문은 에너지 항을 Wrench Matrix의 특이값의 곱으로 스케일링한다:
E_{scaled} = e^{-Q(\mathbf{G})} \cdot E_{FC}(\theta)
여기서 Q(\mathbf{G}) = \prod_i \sigma_i(\mathbf{G}) (특이값들의 곱). 이 스케일링은 두 가지 효과를 낸다:
- \mathbf{G}가 rank-deficient할 때(즉, wrench space가 6D를 span하지 못할 때) Q \approx 0이 되어 에너지가 증폭되고, 최적화가 full-rank 구성으로 유도된다.
- \mathbf{G}가 이미 좋은 구성일 때 스케일링이 줄어들어 안정적인 수렴을 유도한다.
이것은 굉장히 영리한 트릭이다. 마치 역행렬이 존재하지 않는 방향을 “더 크게 보이게” 만들어서 최적화가 그쪽을 피하게 유도하는 것과 같다.
핵심 기여 2: MALA* 최적화 알고리즘
두 번째 기여는 MALA* (Modified Metropolis-Adjusted Langevin Algorithm) 다.
MALA의 기본 아이디어
MALA는 MCMC와 gradient descent를 결합한 알고리즘이다. 일반적인 gradient descent가 에너지의 내리막을 따라 확정적으로 내려가는 것과 달리, MALA는 노이즈를 추가한 gradient step을 제안하고, 그 step을 받아들일지 여부를 확률적으로 결정한다:
\theta_{t+1} = \theta_t - \eta \nabla E(\theta_t) + \sqrt{2\eta} \boldsymbol{\epsilon}, \quad \boldsymbol{\epsilon} \sim \mathcal{N}(0, I)
이 확률적 성질이 그래스프 다양성의 핵심이다 — 순수 gradient descent는 local minimum에 빠지면 탈출하지 못하지만, MALA는 노이즈로 인해 다양한 구성을 탐색할 수 있다.
MALA*의 두 가지 개선
문제는, 병렬로 많은 그래스프 후보를 동시에 최적화할 때 일부 후보들이 나쁜 local minimum에 갇혀 버린다는 것이다. 이것들은 귀중한 계산 자원을 낭비할 뿐 아니라, 최종 데이터셋의 다양성을 낮춘다.
GraspQP는 MALA에 두 가지를 추가한다:
Dynamic Resetting (동적 초기화)
배치 내 전체 샘플들의 에너지 분포를 보고, 특정 임계값을 초과하는 후보들을 새로운 위치에서 다시 시작시킨다:
Algorithm: Dynamic Resetting in MALA*
FOR each optimization step t:
Compute E_i for all grasp candidates i = 1...N
Compute mu = mean(E_i), sigma = std(E_i)
FOR each candidate i:
IF E_i > mu + k * sigma: // k is a hyperparameter
Reset theta_i ~ p_init // reinitialize from prior
ELSE:
theta_i <- MALA update핵심은 전체 배치의 에너지 분포를 기준으로 한다는 것이다. 절대적인 에너지값이 아니라 상대적인 위치로 판단하기 때문에, 전체 배치가 좋아지면 기준도 높아진다.
Adaptive Temperature Scaling (적응적 온도 스케일링)
MALA의 acceptance probability를 샘플의 상대적 에너지 성능에 따라 조절한다. 에너지가 낮은(좋은) 샘플은 step을 적극적으로 받아들이고, 에너지가 높은(나쁜) 샘플은 더 큰 노이즈로 탐색을 촉진한다:
T_i = T_{\text{base}} \cdot f\left(\frac{E_i - \mu_E}{\sigma_E}\right)
이 두 메커니즘의 결합은 직관적이다: 좋은 후보는 정밀하게 수렴시키고, 나쁜 후보는 과감하게 초기화하여 다시 탐색한다. 마치 연구팀에서 잘 되는 아이디어는 깊이 파고들고, 막힌 아이디어는 완전히 새로 시작하는 것과 같다.
전체 에너지 함수 구성
최종 에너지 함수는 세 항의 합이다:
E_{\text{total}} = \lambda_d E_{\text{dist}} + \lambda_r E_{\text{reg}} + \lambda_{fc} E_{\text{FC}}
| 항 | 의미 | 역할 |
|---|---|---|
| E_{\text{dist}} | 손가락 끝과 물체 표면 사이의 거리 | 접촉 형성 유도 |
| E_{\text{reg}} | 손 자세 정규화 (관절 한계, 충돌 방지 등) | 물리적 타당성 유지 |
| E_{\text{FC}} | QP 기반 force closure 에너지 | 안정성 보장 |
\lambda_d, \lambda_r, \lambda_{fc}는 각 항의 가중치로, ablation study를 통해 결정된다.
그래스프 타입과 데이터셋 구성
GraspQP의 또 다른 강점은 세 가지 그래스프 타입을 모두 지원한다는 것이다:
graph LR
A[GraspQP Grasp Types] --> B[Power Grasp\n파워 그래스프\n전체 손으로 감싸기]
A --> C[Pinch Grasp\n핀치 그래스프\n엄지+검지 집기]
A --> D[Tri-finger Grasp\n삼지 정밀 그래스프\n세 손가락 정밀]
B --> E[안정성 높음\n다양성 낮음]
C --> F[세밀한 조작\n높은 다양성 요구]
D --> G[도구 사용 등\n태스크 특화]
style B fill:#ffcc99
style C fill:#99ffcc
style D fill:#99ccff
핵심은 pinch와 tri-finger grasp을 생성하기 위해서는 적은 수의 접촉점으로도 force closure를 달성해야 한다는 것이다. 파워 그래스프처럼 “많이 감싸서 안전하게”가 아니라, “정확한 위치에 정확한 방향으로 힘을 가해서 안전하게” 잡아야 한다. 이것이 바로 완전한 force closure 수식화가 필요한 이유다.
데이터셋 규모
논문에서 제공하는 데이터셋은:
| 항목 | 내용 |
|---|---|
| 대상 물체 | DexGraspNet에서 5,700개 |
| 그리퍼 종류 | 5종 (Psyonic Ability Hand, Shadow Hand, Allegro Hand, Robotiq 2f140, Robotiq 3F) |
| 그래스프 타입 | 3종 (Power, Pinch, Tri-finger) |
| 총 그래스프 수 | 다수 (물체당 다수의 다양한 그래스프) |
특히 Allegro Hand가 포함되어 있어 Wonik Robotics 연구 맥락에서 직접 활용 가능성이 높다.
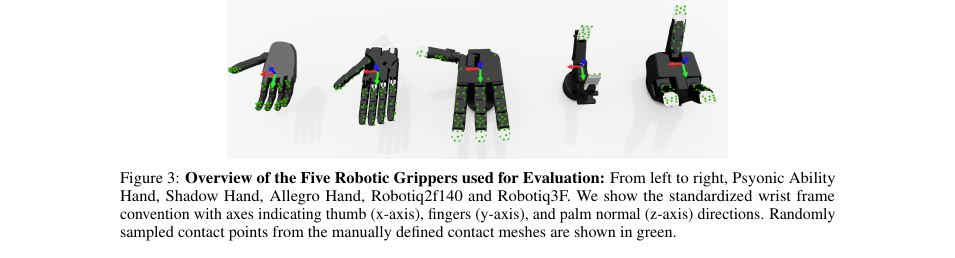
Figure 3: 평가에 사용된 5종 로봇 그리퍼. 왼쪽부터 Psyonic Ability Hand, Shadow Hand, Allegro Hand, Robotiq 2f140, Robotiq 3F. 표준화된 손목 좌표계(엄지=x축, 손가락=y축, 손바닥 법선=z축)와 수동 정의된 contact mesh에서 샘플링된 접촉점(녹색)을 함께 표시합니다.
실험: 어떻게 평가했는가
평가 지표
논문은 두 가지 핵심 지표를 사용한다:
1. UGR (Unique Grasp Rate / Successful Unique Grasp Rate)
Isaac Lab 시뮬레이터에서 5N의 외란력(disturbance force)을 적용했을 때 성공적으로 물체를 유지하는 그래스프의 수. 여기서 “Unique”가 중요하다 — 서로 다른 구성의 그래스프가 얼마나 되는지를 본다. 같은 그래스프를 100번 생성하는 건 의미 없다.
2. H (Entropy)
생성된 그래스프들의 손 자세 공간에서의 엔트로피. 높을수록 다양한 그래스프가 생성되었다는 의미.
이 두 지표의 동시 향상이 GraspQP의 목표다 — 안정성과 다양성의 trade-off를 극복하는 것.
비교 대상
주요 비교 baseline:
| 방법 | 특징 |
|---|---|
| Liu et al. (RA-L 2021) | Differentiable force closure 근사, 현재 state-of-the-art |
| Chen et al. (DexGraspNet) | Sampling-based, 대규모 데이터셋 생성 |
| GraspQP (ours) | QP 기반 엄밀한 force closure |
주요 결과
논문의 Figure 4는 핵심 결과를 잘 보여준다:
시드(seed) 수 대비 Unique Successful Grasps 곡선:
- 기존 baseline (Liu et al.): 512개의 시드를 사용해도 ~60개의 unique successful grasp에서 포화(saturation) 된다.
- GraspQP: 128개의 시드만으로 ~80개의 unique successful grasp 달성. 즉, 더 적은 계산으로 더 많은 다양성을 얻는다.
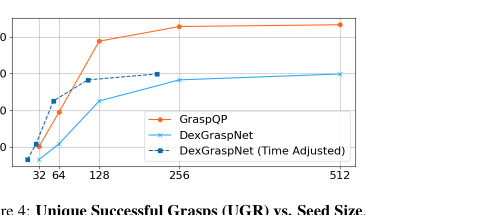
Figure 4: Unique Successful Grasps (UGR) vs. Seed Size. GraspQP는 128개 시드만으로 약 80개의 unique grasp에 도달하며, DexGraspNet은 512개 시드에서도 약 60개 수준에서 포화됩니다. 더 적은 시드로 더 높은 다양성을 달성함을 보여줍니다.
속도 측면에서는 GraspQP가 느리다 — 24-DoF Shadow Hand 기준 grasp당 3.4초 vs 기존 1.15초. 하지만 이 논문은 오프라인 데이터셋 생성을 목적으로 하기 때문에, 속도보다 품질이 중요하다.
Ablation Study
논문은 다양한 ablation을 수행한다:
flowchart LR
A[Full GraspQP] --> B[w/o MALA*\nStandard MALA만 사용]
A --> C[w/o Singular Value Scaling\nE_FC만 사용]
A --> D[Softmax 근사 사용\nstrict QP 대신]
A --> E[Form Closure Only\nFriction 무시]
B --> F[다양성 감소\nLocal minima 문제]
C --> G[Rank 불안정\n일부 degenerate grasp]
D --> H[물리적 타당성 약화\n실제 안정성 감소]
E --> I[Pinch/Precision grasp 불가\n파워 그래스프 편향]
특히 중요한 ablation은 form closure vs force closure 비교다. Form closure는 마찰을 고려하지 않고 기하학적 구속만으로 물체를 고정하는 개념이다. 논문의 Theorem 3.1은 엄밀한 force closure(condition iii)와 완화된 형태들(condition ii, i) 사이의 계층 구조를 제시하고, 실험적으로 엄밀한 조건이 더 좋은 결과를 낸다는 것을 보인다.
관련 연구와의 비교
GraspQP를 전체 landscape에서 이해하려면 관련 연구들과의 관계를 파악해야 한다:
graph TD
A[Grasp Dataset Generation Methods] --> B[Sampling-based]
A --> C[Optimization-based]
A --> D[Learning-based]
B --> B1[GraspIt!\nMiller & Allen 2004]
B --> B2[DexGraspNet\nChen et al. 2023]
C --> C1[Liu et al. RA-L 2021\nSoft FC Approximation]
C --> C2[Grasp'd\nTurpin et al. ECCV 2022]
C --> C3[Fast-Grasp'd\nTurpin et al. 2023]
C --> C4[BODex\nBilevel Optimization]
C --> C5[GraspQP\nThis Paper - QP-based FC]
D --> D1[UniDexGrasp\nWan et al. 2023]
D --> D2[Grasp Prediction Models\nPoint Cloud based]
style C5 fill:#ff9999,stroke:#cc0000,stroke-width:3px
Liu et al. (RA-L 2021) 과의 비교
가장 직접적인 비교 대상이다. Liu et al.도 differentiable force closure를 사용하지만, softmax relaxation을 통해 QP를 근사한다:
\alpha_i = \frac{e^{-E_i/T}}{\sum_j e^{-E_j/T}}
이 근사는 계산이 빠르지만 force closure의 핵심 조건인 \boldsymbol{\alpha} \geq 0, \sum \alpha_i = 1 제약을 연속적으로 완화한다. 온도 T가 작으면 근사가 좋아지지만 gradient vanishing 문제가 생기고, T가 크면 물리적 조건이 흐려진다.
GraspQP는 이 trade-off를 근본적으로 해결한다: QP를 직접 풀고, implicit differentiation으로 정확한 gradient를 얻는다.
Grasp’d / Fast-Grasp’d 와의 비교
Turpin et al.의 Grasp’d 시리즈는 differentiable simulation (Warp, Isaac)을 사용하여 contact-rich 그래스프를 최적화한다. 이 접근은 실제 물리 시뮬레이션의 gradient를 사용하기 때문에 더 현실적이지만:
- 시뮬레이터 의존성이 강함 (이식성 제한)
- 계산 비용이 더 높음
- 마찬가지로 다양성 문제 존재
GraspQP는 분석적(analytical) force closure 수식화를 사용하므로 시뮬레이터 독립적이며, 원하는 플랫폼에서 데이터를 생성할 수 있다.
DexEvolve와의 시너지
최근 나온 DexEvolve (arXiv:2602.15201)는 GraspQP를 시드 생성기(seed generator) 로 활용하여, 그 위에 evolutionary optimization + Isaac Sim을 얹어 더 좋은 결과를 낸다. GraspQP로 생성한 분석적 그래스프 32개를 시드로 주었을 때, evolutionary refinement로 ~115개의 unique grasp을 달성한다. 이는 GraspQP가 파이프라인의 첫 단계로서 우수한 초기값을 제공한다는 것을 보여준다.
비판적 고찰: 강점과 한계
강점
1. 물리적 엄밀성의 회복
기존 접근들이 force closure를 “근사”로 퉁쳤다면, GraspQP는 KKT 조건을 통한 정확한 gradient를 사용한다. 이는 생성된 그래스프가 실제로 force closure를 만족할 가능성을 높인다.
2. 다양성과 안정성의 동시 향상
MALA*의 Dynamic Resetting이 local minimum 탈출을 돕고, 이것이 다양성으로 직결된다. 기존에는 다양성을 높이려면 seed 수를 늘려야 했지만(비용 증가), GraspQP는 동일한 seed 수로 더 넓은 구성 공간을 탐색한다.
3. 멀티-그리퍼 / 멀티-타입 지원
5종 그리퍼, 3종 그래스프 타입을 통일된 프레임워크로 다룬다. 그리퍼마다 다른 수식화가 필요 없다.
4. 오픈소스 데이터셋 기여
5,700 물체 × 5 그리퍼 × 3 타입의 대규모 데이터셋은 downstream learning 연구에 즉시 활용 가능하다.
약점 및 한계
1. 연산 속도
grasp당 3.4초(Shadow Hand, 24-DoF)는 오프라인 생성에는 허용 가능하지만, 온라인 실시간 응용이나 매우 대규모 생성에는 병목이 된다. QP는 기본적으로 iterative solver를 필요로 하므로, 이 부분의 최적화가 과제로 남는다.
2. Point Cloud Input 부재
GraspQP는 3D mesh 모델이 있는 객체에 대해서만 동작한다. 실제 배포 환경에서는 RGB-D 카메라로 얻은 partial point cloud만 있는 경우가 많다. 논문은 다운스트림 grasp prediction 모델(point cloud → grasp pose)의 훈련 데이터를 생성하는 것이 목적이지만, 이 갭 자체는 해소되지 않는다.
3. Sim-to-Real 검증 부재
실험이 Isaac Lab 시뮬레이션에서만 수행된다. 실제 로봇에서의 물리적 검증이 없어, 시뮬레이터와 현실 세계 사이의 gap이 얼마나 되는지 알 수 없다. 특히 마찰 계수가 시뮬레이션과 다를 때 force closure가 얼마나 유지되는지는 미지수다.
4. Contact Point 사전 정의 의존성
논문에서는 각 그리퍼에 대해 수동으로 정의된 contact mesh(녹색 점으로 표시)를 사용한다. 이 contact region이 결과에 큰 영향을 미칠 것으로 보이지만, 그 민감도 분석은 충분하지 않다.
5. 태스크-특화 고려 없음
생성된 그래스프는 물리적으로 안정적이지만, 특정 태스크(예: 나사 돌리기, 조심스럽게 다루기)에 적합한지는 보장하지 않는다. 태스크와 연관된 grasp selection은 별도 레이어가 필요하다.
Allegro Hand 연구자를 위한 특별 주목 포인트
Wonik Robotics의 Allegro Hand를 연구하는 입장에서 이 논문이 특히 흥미로운 이유:
1. 직접적인 데이터 활용: 논문 데이터셋에 Allegro Hand가 포함되어 있어, grasp prediction 모델 훈련에 즉시 사용 가능하다.
2. 파이프라인 연결 가능성:
GraspQP (grasp 생성)
--> Point Cloud-based Grasp Prediction (학습)
--> GeoRT / Teleoperation (실제 손 제어)
--> Real Allegro Hand Execution이 파이프라인에서 GraspQP는 학습 데이터의 품질을 결정하는 핵심 단계다.
3. HORA / In-hand Manipulation과의 관계: Power grasp뿐 아니라 precision grasp 데이터를 생성할 수 있다는 점은, in-hand manipulation 중 그래스프 재구성(grasp regrasp)을 학습할 때 다양한 초기 구성을 제공할 수 있다는 의미다.
요약 및 결론
GraspQP는 dexterous grasp 데이터셋 생성 분야에서 중요한 발전을 이룩했다. 핵심을 세 가지로 압축하면:
1. “Force closure를 제대로 측정하자” — QP를 통한 엄밀하고 미분 가능한 수식화
2. “나쁜 후보는 과감히 버리자” — MALA*의 Dynamic Resetting으로 다양성 확보
3. “pinch도 데이터로 만들자” — 파워 그래스프 편향에서 탈피한 정밀 그래스프 생성
이 논문이 제시하는 더 큰 메시지는: 물리 법칙을 근사로 퉁치면 결국 현실에서 동작하지 않는다는 것이다. 마찰이 있는 접촉, force closure의 엄밀한 조건 — 이것들을 제대로 모델링해야만 실제로 잡을 수 있는 그래스프를 생성할 수 있다.
향후 연구 방향으로는 (1) 실제 로봇에서의 sim-to-real 검증, (2) partial observation(point cloud input) 환경에서의 적용, (3) 태스크-특화 grasp synthesis와의 결합, (4) 실시간 적용을 위한 QP solver 가속이 자연스러운 다음 단계가 될 것이다.
DexEvolve처럼 GraspQP를 시드로 사용하는 후속 연구들이 등장하는 것을 보면, 이 논문이 단순한 end-to-end 솔루션을 넘어 더 큰 파이프라인의 핵심 부품으로 자리잡아 가고 있음이 분명하다.
참고 문헌
- Liu, T., et al. (2021). Synthesizing diverse and physically stable grasps with arbitrary hand structures using differentiable force closure estimator. RA-L.
- Chen, et al. (2023). DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset. CVPR.
- Turpin, D., et al. (2022). Grasp’d: Differentiable Contact-Rich Grasp Synthesis. ECCV.
- Lum, T.G.W., et al. (2024). DextrAH-G: Pixels-to-Action Dexterous Arm-Hand Grasping with Geometric Fabrics.