flowchart TD
A["Raw DIGIT Images\n(left + right finger, 640x480)"] --> B["Keypoint Encoder\n(ResNet-18 mini)"]
B --> C["K=8 Feature Maps\n-> Active Keypoint k=[x,y,i]"]
C --> D["State: s = [k_L, k_R, j]\n(14-dimensional)"]
D --> E["Neural Network\nDynamics Model\nf(s,a) -> s'"]
E --> F["MPC + CEM Optimizer\n250 particles, horizon T=10\n~120 iterations per step"]
F --> G["Optimal Action a*_t"]
G --> H["Allegro Hand\n(8 DOF: 4 joints × 2 fingers)"]
H --> A
style A fill:#2d6a9f,color:#fff
style D fill:#1a6b3a,color:#fff
style E fill:#7b3291,color:#fff
style F fill:#c0392b,color:#fff
📃DIGIT 리뷰
tactile
visuo-tactile
sim2real
A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
- 🤖 DIGIT은 기존 vision-based tactile sensor의 제약을 개선하여 소형화, 내구성 강화, 저비용 대량 생산을 가능하게 한 새로운 고해상도 촉각 센서입니다.
- 🦾 이 논문은 DIGIT 센서를 Allegro hand에 장착하여 복잡한 in-hand marble manipulation 작업을 수행하며, tactile-MPC와 효율적인 Struct-NN 기반의 동역학 모델 학습을 통해 이를 제어합니다.
- 🚀 학습된 모델 기반 제어기는 수동으로 튜닝된 컨트롤러보다 우수한 성능을 보여주며, DIGIT의 오픈 소스 디자인은 로봇 커뮤니티에서 촉각 센서의 광범위한 채택을 촉진할 것으로 기대됩니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
이 논문은 로봇 공학에서 In-Hand Manipulation의 오랜 난제 중 하나인 정밀한 접촉력 감지를 해결하기 위해 저비용, 소형, 고해상도 촉각 센서인 DIGIT를 제안합니다. DIGIT는 기존 vision-based tactile sensor의 장점을 유지하면서 소형화, 제조 공정 간소화, 신뢰성 향상을 통해 단점을 개선했습니다.
I. DIGIT 센서 디자인
DIGIT는 20mm x 27mm x 18mm 크기와 약 20g의 무게를 가진 소형 센서로, 다지형 로봇 핸드(예: Allegro hand)에 장착하기 적합합니다. 주요 개선 사항은 다음과 같습니다.
- 소형화 및 모듈화: 기존 GelSight 센서에 비해 크기가 대폭 줄었으며, ‘press fit’ 연결 방식을 사용하여 elastomer, housing, camera 등 개별 구성 요소를 쉽게 교체할 수 있는 modular 디자인을 채택했습니다. 이는 손상된 부품 교체 및 다양한 task-specific elastomer 사용을 용이하게 합니다.
- 저비용 및 제조 용이성: 3D 프린팅 또는 injection mold에 적합한 플라스틱 multi-body housing 디자인을 사용하며, 상업용 부품(commercial off-the-shelf components)을 적극 활용하여 대량 생산 시 개당 약 $15의 낮은 제조 비용을 달성했습니다.
- 향상된 기계적 신뢰성 및 내구성: 접촉면에 사용되는 elastomer의 내구성을 개선했습니다. 새로운 제조 공정과 Smooth-On Solaris 실리콘을 사용하여 image transfer layer의 마모를 줄였습니다. abrasion test 결과, DIGIT의 elastomer는 다른 GelSight 계열 elastomer에 비해 훨씬 낮은 마모도를 보여주며, 이는 센서의 수명과 신뢰성을 크게 향상시킵니다.
- 맞춤형 전자 회로: 카메라 특성, 조명 및 비디오 캡처를 제어하기 위해 custom-designed electronics를 사용했습니다. Omnivision OVM7692 CMOS 카메라(60fps)와 SuperSpeed USB 3.0 허브를 연결하는 custom PCB를 포함하며, RGB LEDs를 통해 조명 강도를 조절할 수 있습니다.
II. In-Hand Manipulation 응용 및 학습 방법론
DIGIT 센서의 성능을 입증하기 위해 Allegro hand에 DIGIT를 장착하여 유리 구슬(marble)을 정밀하게 in-hand manipulation하는 작업을 수행했습니다. 이는 구슬의 미끄러짐(slipping)과 회전(rolling) 역학을 섬세하게 제어해야 하는 고난이도 task입니다.
- 자율 학습 데이터 수집: Allegro hand가 구슬을 집은 후, 손가락을 무작위로 움직여 약 10초 동안 4800개의 trial 데이터를 자율적으로 수집했습니다. 이 과정에서 두 DIGIT 센서의 비디오, 8개의 joint servo의 각도 위치 (j), 그리고 joint angular displacement command (a)가 기록되었습니다.
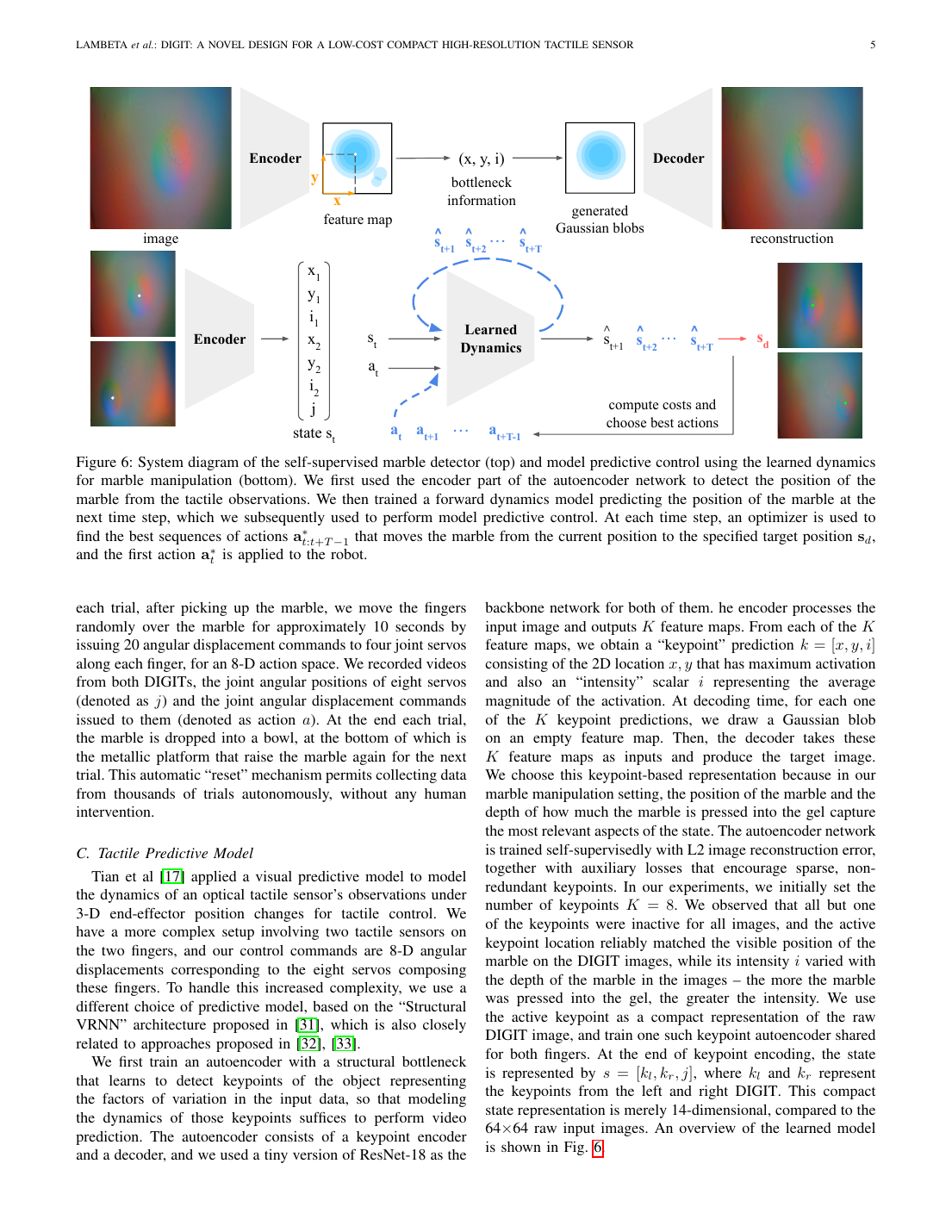
- Tactile Predictive Model (촉각 예측 모델): 고해상도 촉각 이미지라는 고차원 입력 문제를 해결하기 위해 Structural VRNN 아키텍처에서 영감을 받은 compact하고 저차원적인 ‘keypoint’ 표현을 학습하는 방법을 사용했습니다.
- Keypoint Autoencoder: 입력 이미지를 (x, y, i) 형태의 keypoint로 인코딩하고 이를 다시 이미지로 재구성하는 autoencoder를 훈련시켰습니다. 여기서 (x, y)는 구슬의 2D 위치를 나타내고, (i)는 구슬이 elastomer에 눌리는 깊이, 즉 압력을 나타냅니다. 이 autoencoder는 ResNet-18을 backbone network로 사용하며 L2 image reconstruction error를 통해 self-supervised 방식으로 학습됩니다. 이 과정을 통해 64x64 raw image를 14차원의 compact한 상태 표현 s = [k_l, k_r, j] (좌우 DIGIT의 keypoint 및 joint 각도)로 줄일 수 있습니다.
- Dynamics Model: 학습된 keypoint 표현을 사용하여 다음 상태를 예측하는 신경망 동역학 모델 s' = f(s, a)를 훈련시켰습니다. 이 모델은 간단한 Multi-Layer Perceptron (MLP)으로 구성되어 있습니다.
- Model Predictive Control (MPC): 학습된 동역학 모델을 기반으로 Cross-Entropy Method (CEM)를 사용하여 MPC를 수행했습니다.
- 계산 효율성 최적화: 기존 연구와 달리, 계획(planning)을 이미지 공간이 아닌 14차원의 keypoint 공간에서 직접 수행합니다. 엔코더 네트워크(모델에서 가장 계산 비용이 많이 드는 부분)는 MPC 단계 시작 시 한 번만 호출되므로, 한 MPC 단계당 계산 시간을 1.4초로 단축하여 실시간 제어를 가능하게 합니다 (CDNA 모델은 69초 소요).
- Cost function: 계획 과정에서 각 action sequence의 비용은 현재 keypoint 위치와 목표 keypoint 위치 간의 Euclidean distance로 정의됩니다. 이는 구슬을 원하는 (x, y) 위치로 이동시키고, 너무 세게 누르거나 떨어뜨리는 것을 방지합니다.
III. 실험 결과
- Video Predictive Model 평가: Struct-NN 모델은 정성적으로 좋은 예측 성능을 보이며 (Fig. 7), CDNA 모델에 비해 RMSE는 약간 높지만 (Table III), 훨씬 적은 파라미터 수와 압도적으로 빠른 inference 및 MPC 계산 속도를 보여주었습니다. 특히 MPC 단계에서 속도 차이는 약 50배 이상으로, 실시간 다지형 제어에 Struct-NN의 효율성이 필수적임을 입증했습니다.
- Marble Manipulation 결과: 학습된 동역학 모델을 사용한 MPC 컨트롤러는 수동으로 튜닝된 선형 P controller에 비해 목표 위치까지의 Euclidean distance를 지속적으로 감소시켜 더 나은 성능을 보였습니다 (Fig. 8 상단). 이는 learned model이 complex하고 non-linear한 구슬의 동역학을 효과적으로 제어함을 나타냅니다. 비록 약 25%의 trial에서 구슬이 떨어지는 한계가 있었으나 (Fig. 8 하단), 이는 task의 난이도와 actuation noise 및 계획의 부정확성 때문으로 분석됩니다.
결론: DIGIT는 고해상도 촉각 감지를 제공하면서 소형화, 내구성, 저비용을 모두 만족하는 혁신적인 tactile sensor입니다. 이 센서를 활용하여 deep model predictive control 기반으로 복잡한 in-hand marble manipulation 작업을 성공적으로 수행할 수 있음을 입증했습니다. 논문 저자들은 DIGIT의 디자인과 제조 공정을 www.digit.ml에 open-source화하여 로봇 공학 커뮤니티의 광범위한 채택을 장려하고 있습니다. 향후 연구는 센서의 추가적인 소형화 및 curved, omni-directional sensing field를 가진 센서 디자인에 초점을 맞출 것입니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
IEEE Robotics and Automation Letters (RA-L), 2020
Facebook AI Research (FAIR)
서론: 왜 로봇은 아직도 손을 못 쓰는가?
잠깐 생각해보자. 당신이 책상 위에 놓인 유리 구슬을 집어 손가락 사이에서 굴린다고 해보자. 이 동작이 얼마나 복잡한지를. 손가락이 구슬 위를 미끄러지지 않게 적당한 힘을 주면서도, 너무 세게 잡아 구슬이 튀어나가지 않게 해야 한다. 구슬이 어디에 있는지, 얼마나 눌렸는지, 미끄러지려 하는지—이 모든 정보를 당신의 손끝 신경이 실시간으로 뇌에 전달하고 있다.
로봇이 이걸 못 하는 이유가 뭘까? 물론 여러 이유가 있지만, 촉각 센서의 부재가 핵심 병목 중 하나다. 로봇이 물체를 잡을 때 무슨 일이 벌어지는지 “느낄” 수 없다면, 정교한 조작은 근본적으로 불가능하다. 카메라로 손의 바깥을 보는 건 손가락 내부의 접촉 상황을 알려주지 못한다.
이 논문이 등장한 배경이 바로 여기에 있다. DIGIT는 Facebook AI Research(FAIR) 팀이 개발한 비전 기반 촉각 센서로, 크게 두 가지 문제를 동시에 해결하고자 한다.
문제 1: 기존 촉각 센서들은 왜 안 쓰이나?
기존 고해상도 촉각 센서(GelSight 등)는 성능은 좋지만 부피가 너무 크고, 제조 재현성이 낮으며, 비쌌다. 반면 저렴한 압력 센서들은 공간 해상도가 낮아 섬세한 조작에 쓰기 어려웠다. “성능 vs. 실용성”의 트레이드오프가 오랫동안 연구자들을 괴롭혀 왔다.
문제 2: 고해상도 촉각으로 실제 조작을 어떻게 하나?
설령 좋은 센서가 있더라도, 640×480 픽셀짜리 이미지가 60fps로 쏟아지는 데이터를 실시간 제어에 쓰기는 계산적으로 부담스럽다. 여러 손가락에서 동시에 들어오는 촉각 스트림을 어떻게 처리해야 하는가?
DIGIT는 이 두 문제에 대한 공학적·알고리즘적 해답을 동시에 제시한다.

DIGIT 센서를 Allegro hand 손가락 끝에 장착한 전체 시스템 개요 (논문 PDF — p.1)
방법 I: DIGIT 센서 설계
비전 기반 촉각 센서의 원리
먼저 이 계열 센서가 어떻게 작동하는지부터 이해하자. 원리 자체는 아름답도록 단순하다.
[Object] --presses--> [Soft Elastomer Gel]
[Deformed surface reflects light differently]
[RGB Camera inside sensor] --captures--> [Deformation image]엘라스토머(탄성 고분자)로 만든 부드러운 젤이 센서 표면을 덮고 있다. 물체가 이 젤에 접촉하면 젤 표면이 변형되고, 내부 LED 조명이 이 변형된 표면을 비춘다. 내부 카메라는 이 빛의 변화를 이미지로 포착한다. 변형 = 이미지 변화 = 접촉 정보. 이것이 GelSight 계열 센서들의 근본 원리다.
이 방식의 장점은 공간 해상도가 카메라 해상도에 의해서만 제한된다는 것이다. 카메라 픽셀이 충분히 작으면 수십 마이크로미터 수준의 표면 구조도 감지할 수 있다 — 논문의 Fig. 3이 보여주듯, DIGIT는 서브밀리미터 구조를 선명하게 포착한다.
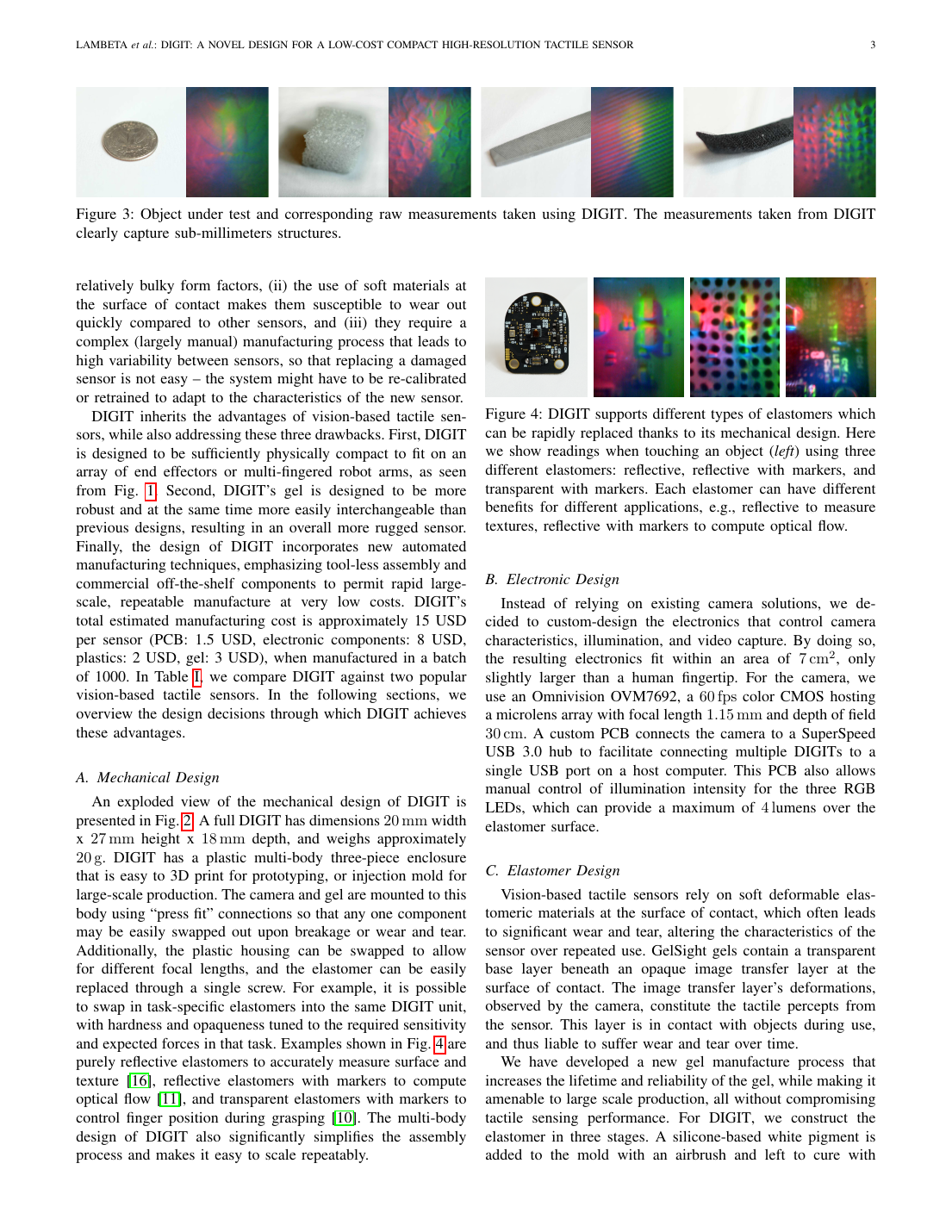
다양한 물체에 대한 DIGIT의 고해상도 촉각 이미지와 구슬 직경별 변형 측정 (논문 PDF — p.3)
기계적 설계: 손가락 끝에 들어가는 카메라
DIGIT가 기존 GelSight 대비 가장 극적으로 개선한 부분은 폼팩터다.
| 센서 | 크기 (mm) | 무게 (g) | 센싱 면적 (mm) | 해상도 | FPS | 부품 비용 |
|---|---|---|---|---|---|---|
| DIGIT (Ours) | 20×27×18 | 20 | 19×16 | 640×480 | 60 | $15* |
| Fingertip GelSight [11] | 35×60×35 | NA | 18×14 | 1920×1080 | 30 | ~$30 |
| GelSlim [12] | 50×205×20 | NA | 30×40 | 640×480 | 60 | NA |
1,000개 단위 생산 기준
GelSight의 긴 축이 205mm인 반면, DIGIT는 27mm다. 이 차이가 결정적이다. GelSight는 Allegro Hand 같은 멀티핑거 로봇 손에 장착 자체가 불가능하다. DIGIT는 처음부터 Allegro Hand의 각 손가락 끝에 장착 가능하도록 설계되었다(Fig. 1 참조).
구조는 7개 부품으로 이루어진다:
A) Elastomer (contact surface)
B) Acrylic window
C) Snap-fit holder
D) Lighting PCB (RGB LEDs)
E) Plastic housing
F) Camera PCB (OVM7692)
G) Back housing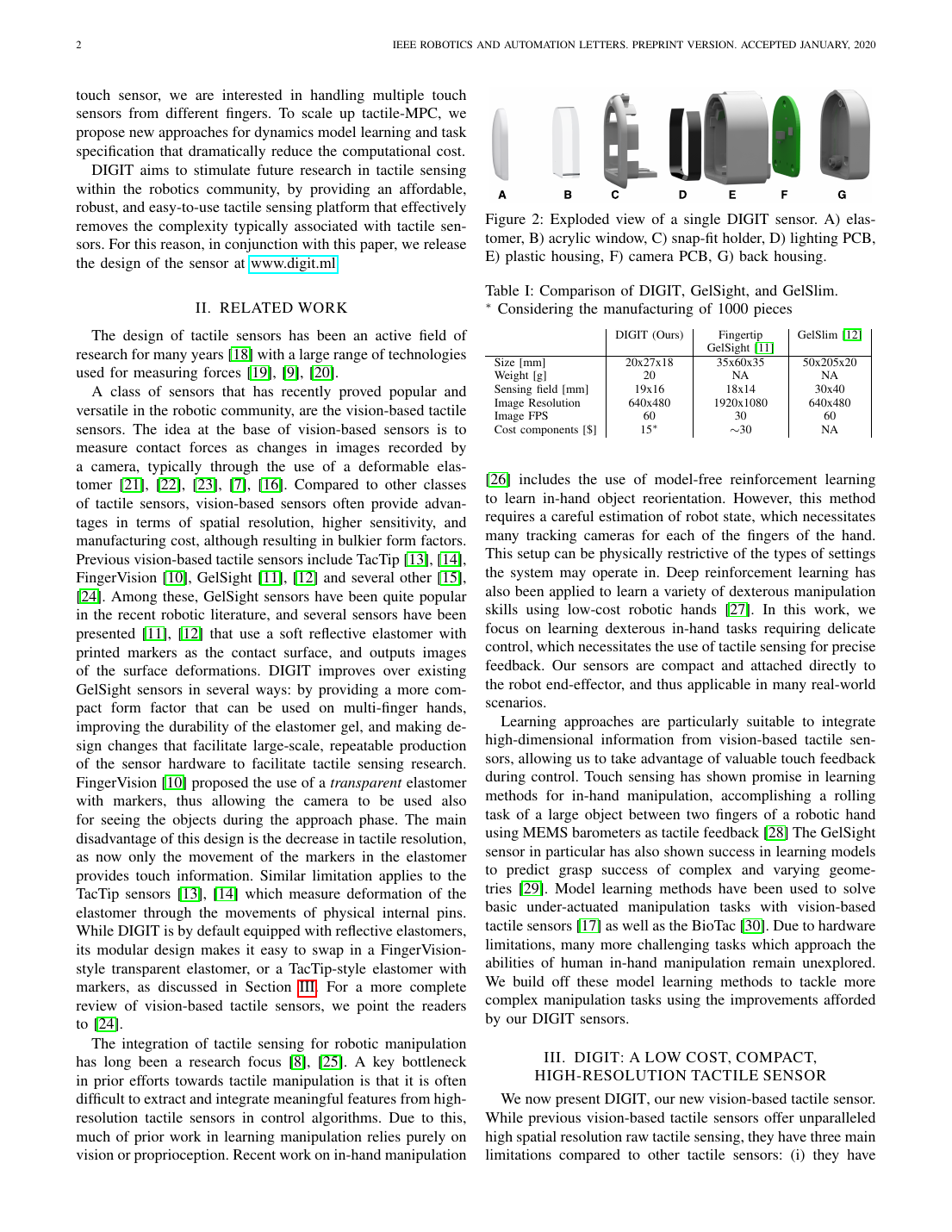
DIGIT의 분해도: elastomer, acrylic window, lighting/camera PCB, housing 등 모듈형 구성 요소 (논문 PDF — p.2)
핵심 설계 철학은 모듈성과 press-fit 조립이다. 나사를 하나만 풀면 젤을 교체할 수 있고, 필요에 따라 다른 종류의 엘라스토머를 끼울 수 있다:
- 불투명 반사형: 표면 텍스처·형상 측정 (기본값)
- 마커 있는 반사형: 광학 흐름(optical flow) 계산
- 마커 있는 투명형: 파지 중 손가락 위치 확인 (FingerVision 스타일)
하나의 하드웨어로 세 가지 운용 모드를 지원한다는 점은 연구 플랫폼으로서 매력적이다.
전자 설계: 7cm²에 담은 카메라 시스템
DIGIT는 기성품 카메라 모듈 대신 커스텀 PCB를 설계했다. 카메라로는 Omnivision OVM7692를 채택했는데, 이 칩은 초점거리 1.15mm, 심도 30cm의 마이크로렌즈 어레이를 내장해 대단히 짧은 거리에서도 선명한 이미지를 얻는다. 전체 전자부품이 차지하는 면적은 7cm² — 인간 손가락 끝보다 조금 클 뿐이다.
조명은 세 개의 RGB LED로 구성되어 엘라스토머 표면에 최대 4루멘을 공급한다. 여러 DIGIT를 하나의 USB 포트에 연결할 수 있도록 SuperSpeed USB 3.0 허브를 PCB에 통합했다. 이는 멀티핑거 핸드 운용에서 중요한 실용적 고려사항이다.
엘라스토머 설계: 내구성의 혁신
기존 GelSight 계열 센서의 가장 큰 약점은 젤의 마모였다. 젤 표면의 불투명 이미지 전사 레이어가 반복 접촉으로 손상되면 센서 특성이 달라지고, 새 젤로 교체하면 재훈련이 필요할 수 있었다.
DIGIT의 젤 제조 공정은 3단계다:
Step 1: Airbrush silicone-based white pigment into mold
+ chemical kicker -> uniform image transfer layer
Step 2: Apply base layer silicone to finger-shaped mold, cure
Step 3: Remove from mold, glue onto acrylic window
using Smooth-On Sil-Poxy (optically clear adhesive)
-> Acrylic-gel unit press-fit into DIGIT body소재로는 태양광 패널 코팅에 쓰이는 Smooth-On Solaris 실리콘을 사용한다. 이 소재 선택과 제조 공정이 내구성에 결정적인 차이를 만든다.
정량적 검증 결과가 인상적이다. 업계 표준 선형 마모 장치(1.7N, H-18 Calibrade 중간 마모 팁)로 5회 패스씩 사이클을 진행하면서 광투과율 변화(%)로 마모도를 측정했다:
| 젤 / 마모 사이클 | 5회 | 10회 | 15회 |
|---|---|---|---|
| DIGIT (Ours) | 0% | 0.3% | 0.3% |
| Yuan et al. [11] 젤 | 276% | 482% | 805% |
| GelSight Inc. 젤 | 475% | 662% | 918% |
단 5번의 패스 만에 기존 젤들은 찢어지거나 표면 소재가 탈락해 사용 불가 상태가 된 반면, DIGIT 젤은 15번 사이클 후에도 0.3% 변화에 그쳤다. 1,000배 이상의 내구성 차이다.
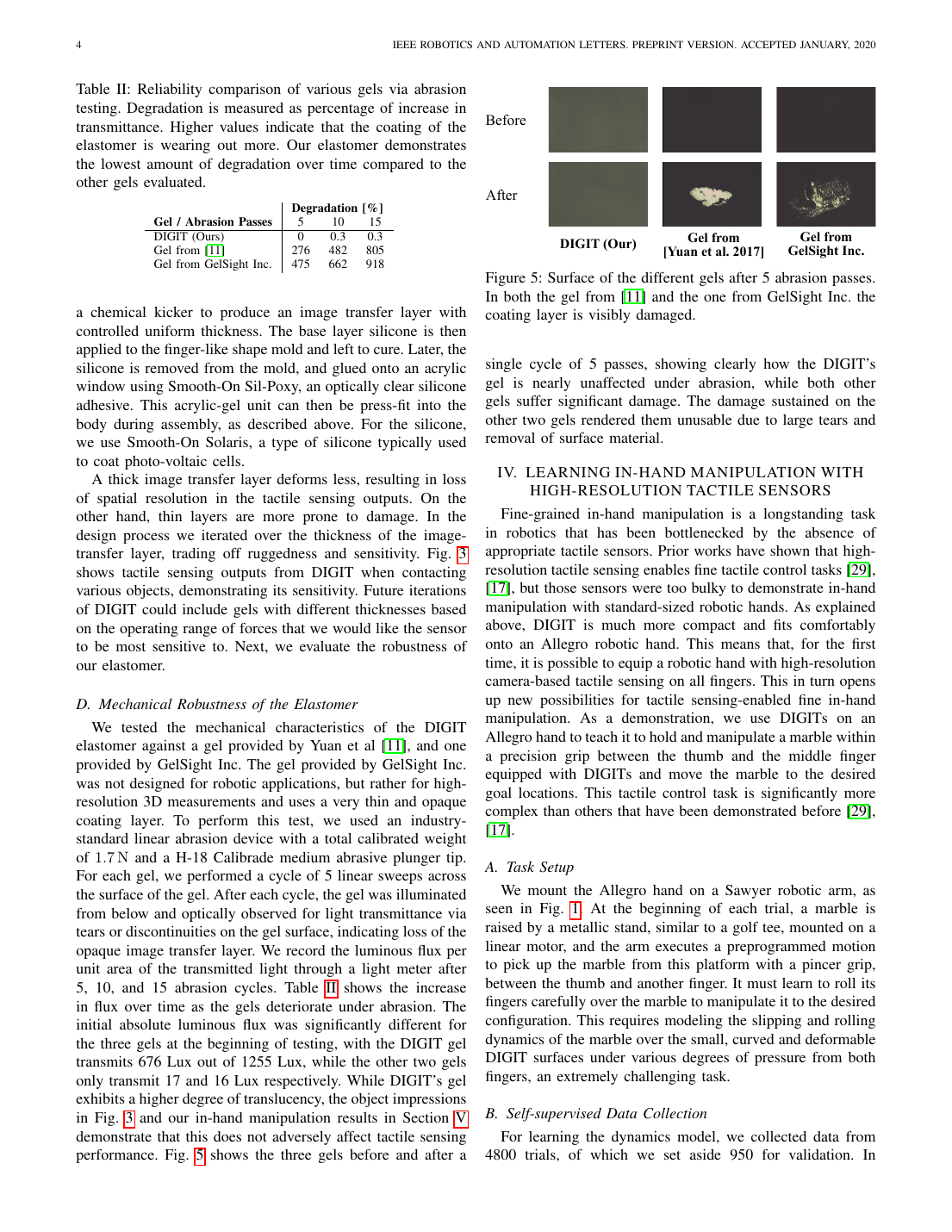
마모 테스트 결과: DIGIT 젤과 기존 GelSight 계열 젤의 사이클별 손상 비교 (논문 PDF — p.4)
한 가지 trade-off를 지적해두어야 한다: DIGIT 젤은 기존 젤 대비 투과율이 높다(676 Lux vs. 17~16 Lux). 젤이 약간 더 반투명하다는 의미인데, 저자들은 이것이 촉각 센싱 성능에 부정적 영향을 주지 않음을 실험으로 보였다.
방법 II: 촉각 기반 인-핸드 조작 학습
DIGIT 센서 자체의 설계가 논문의 절반이라면, 나머지 절반은 이 센서를 사용해 어떻게 조작 능력을 학습하는가다. 유리 구슬을 두 손가락 사이에서 원하는 위치로 굴리는 것이 목표 태스크다. 이 태스크가 얼마나 어려운지 생각해보라: 구슬은 작고 매끄럽고, 접촉면은 곡면이고 변형되며, 너무 세게 잡으면 튀어나가고 너무 약하면 떨어진다.
시스템 파이프라인 개요
자기지도 데이터 수집
4,800번의 시행에서 데이터를 수집했다. 각 시행에서:
- 금속 받침대가 구슬을 들어올린다
- Sawyer 로봇 암이 사전 프로그래밍된 동작으로 구슬을 집는다
- 4개 서보 × 2손가락 = 8차원 행동 공간에서 랜덤 각도 변위 명령 20회 발행 (~10초)
- 구슬이 떨어지면 그릇에 담기고 받침대가 다시 들어올린다
전체 리셋 사이클이 자동화되어 있어 인간 개입 없이 수천 회 자율 데이터 수집이 가능하다. 950개 시행은 검증 세트로 분리했다.
키포인트 오토인코더: 이미지를 14차원으로 압축하기
이 부분이 알고리즘적으로 가장 핵심적인 아이디어다. 640×480 이미지를 직접 다루면서 수십만 번의 예측을 실시간에 돌리는 건 불가능하다. 어떻게 할까?
핵심 통찰: 구슬 조작 태스크에서 실제로 중요한 정보는 구슬이 어디에 있는가 와 얼마나 눌렸는가 뿐이다. 나머지 픽셀 정보는 제어 목적상 잡음이다.
구조적 오토인코더(Structural VRNN [31] 기반)가 이 압축을 학습한다:
인코더 경로:
\text{Encoder}(I) \rightarrow \{f_1, f_2, \ldots, f_K\} \quad (K \text{ feature maps})
각 피처맵 f_k에서 키포인트를 추출한다:
k_k = [x_k, y_k, i_k]
- (x_k, y_k): 피처맵에서 활성화가 최대인 2D 위치
- i_k: 해당 피처맵의 평균 활성화 크기 (구슬이 얼마나 눌렸는지)
디코더 경로:
각 키포인트 (x_k, y_k)에 대해 빈 피처맵에 가우시안 블롭을 그린다. 이 K개의 피처맵을 디코더에 입력해 원본 이미지를 재구성한다.
손실 함수는 L2 이미지 재구성 오차 + 키포인트 희소성·비중복성을 강제하는 보조 손실의 합이다:
\mathcal{L} = \mathcal{L}_{\text{reconstruction}} + \lambda \mathcal{L}_{\text{sparsity}} + \mu \mathcal{L}_{\text{separation}}
실험 결과 K=8로 설정했을 때 8개 키포인트 중 7개는 비활성화되고, 하나의 활성 키포인트만이 구슬의 위치를 정확히 추적했다. 강도 i는 구슬이 깊게 눌릴수록 증가했다. 이 자기지도 학습이 태스크 관련 표현을 자동으로 발견한 것이다.
최종 상태 표현:
s = [k_L, k_R, j] \in \mathbb{R}^{14}
- k_L = [x_L, y_L, i_L]: 왼쪽(엄지) DIGIT 키포인트
- k_R = [x_R, y_R, i_R]: 오른쪽(중지) DIGIT 키포인트
- j \in \mathbb{R}^8: 8개 서보의 관절 각도
64×64 이미지 두 장(= 8,192차원)이 14차원으로 압축된다. 585배 차원 감소다.
Struct-NN 시스템: 키포인트 오토인코더와 학습된 동역학 모델의 구조 (논문 PDF — p.5)
동역학 모델: Struct-NN
압축된 상태 공간에서 동역학을 학습한다:
s' = f_\theta(s, a)
14차원 상태 s와 8차원 행동 a를 입력받아 다음 상태 s'를 예측하는 MLP다. 환경이 완전 관측 가능하므로(키포인트가 구슬 위치를 완전히 기술), 복잡한 VRNN 대신 간단한 MLP로 충분하다.
훈련 시 두 가지 데이터 증강을 적용한다: - Zero-action 튜플 삽입: (s, 0, s) 형태의 데이터를 무작위 삽입하여 모델이 “아무것도 안 하면 상태가 변하지 않는다”는 물리적 상식을 학습하게 함 - RGB 값·감마 교란: 조명 변화에 대한 강인성 확보
| 모델 | 1 forward-backward | 1 forward | MPC 1 step | 파라미터 수 |
|---|---|---|---|---|
| Struct-NN (Ours) | 4.3 ms | 1.6 ms | 1.4 s | 1.2M |
| CDNA [35] | 6.8 ms | 2.3 ms | 69 s | 4M |
MPC 1스텝에서 50배 속도 차이가 핵심이다. CDNA는 69초가 걸려 실시간 제어에 사용 불가능하다.
모델 기반 제어: MPC + CEM
학습된 동역학 모델로 모델 예측 제어(MPC)를 수행한다. 최적화 알고리즘으로는 교차 엔트로피 방법(CEM)을 사용한다.
MPC with CEM (one control step):
Input: current state s_t, goal keypoint (x_g, y_g, i_g)
Parameters: 250 particles, horizon T=10, ~120 CEM iterations
for each CEM iteration:
sample 250 action sequences {a_t:t+T-1} from current distribution
for each sequence:
rollout: s_t+1 = f(s_t, a_t), ..., s_t+T = f(s_t+T-1, a_t+T-1)
cost = sum_{tau=t}^{t+T} ||[x_tau, y_tau, i_tau] - [x_g, y_g, i_g]||_2
update distribution from top-K lowest-cost sequences
Apply a*_t (first action of best sequence) to Allegro Hand비용 함수는 키포인트 공간에서의 유클리드 거리 합산이다. (x, y) 항은 구슬을 목표 위치로 이동시키고, i 항은 구슬을 떨어뜨리거나(낮은 i) 너무 세게 누르는(높은 i) 행동을 억제한다. 우아하게 단순한 비용 설계다.
Struct-NN 덕분에 인코더는 실제 이미지에 대해 MPC 1스텝당 단 1번만 호출되고, 이후 수십만 번의 예측은 14차원 MLP만으로 수행된다. 계산 병목을 인코딩에서 계획(planning)으로 이동시킨 설계다.
실험: 결과와 해석
동영상 예측 모델 성능
먼저 동역학 모델 자체를 벤치마킹한다. BAIR 로봇 푸싱 데이터셋과 자체 구슬 조작 데이터셋 모두에서 CDNA와 비교한다.
| 데이터셋 | Struct-NN RMSE | CDNA RMSE |
|---|---|---|
| BAIR 푸싱 | 0.06023 | 0.01082 |
| 구슬 조작 | 0.00657 | 0.00028 |
흥미로운 패턴이 보인다. RMSE는 CDNA가 낫지만, MPC 실제 성능에서는 Struct-NN이 우세하다. 왜? 이미지 재구성 오차가 제어 성능과 직결되지 않기 때문이다. Struct-NN이 포착하는 키포인트 표현이 제어에 충분히 좋은 표현임을 시사한다.
구슬 조작 실험
각 실험은 50회 반복이며, 목표 위치는 현재 위치에서 최소 16픽셀 떨어진 곳으로 랜덤 샘플링된다.
비교 대상: 수동 튜닝한 선형 비례(P) 제어기
P 제어기의 이득 행렬은 P \in \mathbb{R}^{3 \times 8}으로, 3차원 변위 벡터(키포인트 오차)를 8차원 행동으로 매핑한다. 이 행렬을 수작업으로 튜닝하는 것이 얼마나 어려운가를 생각해보라 — 24개 파라미터를 동역학이 비선형인 시스템에서 손으로 맞춰야 한다.
결과 (Fig. 8 참조):
- Struct-NN MPC: 행동 수가 늘어날수록 목표까지의 유클리드 거리가 꾸준히 감소
- P 제어기: 거리가 오히려 증가 (평균)
- 구슬 낙하율: 두 방법 모두 시간이 지날수록 낙하 증가, Struct-NN이 전반적으로 낮음
- 약 25%의 시행에서 구슬이 목표 도달 전 낙하
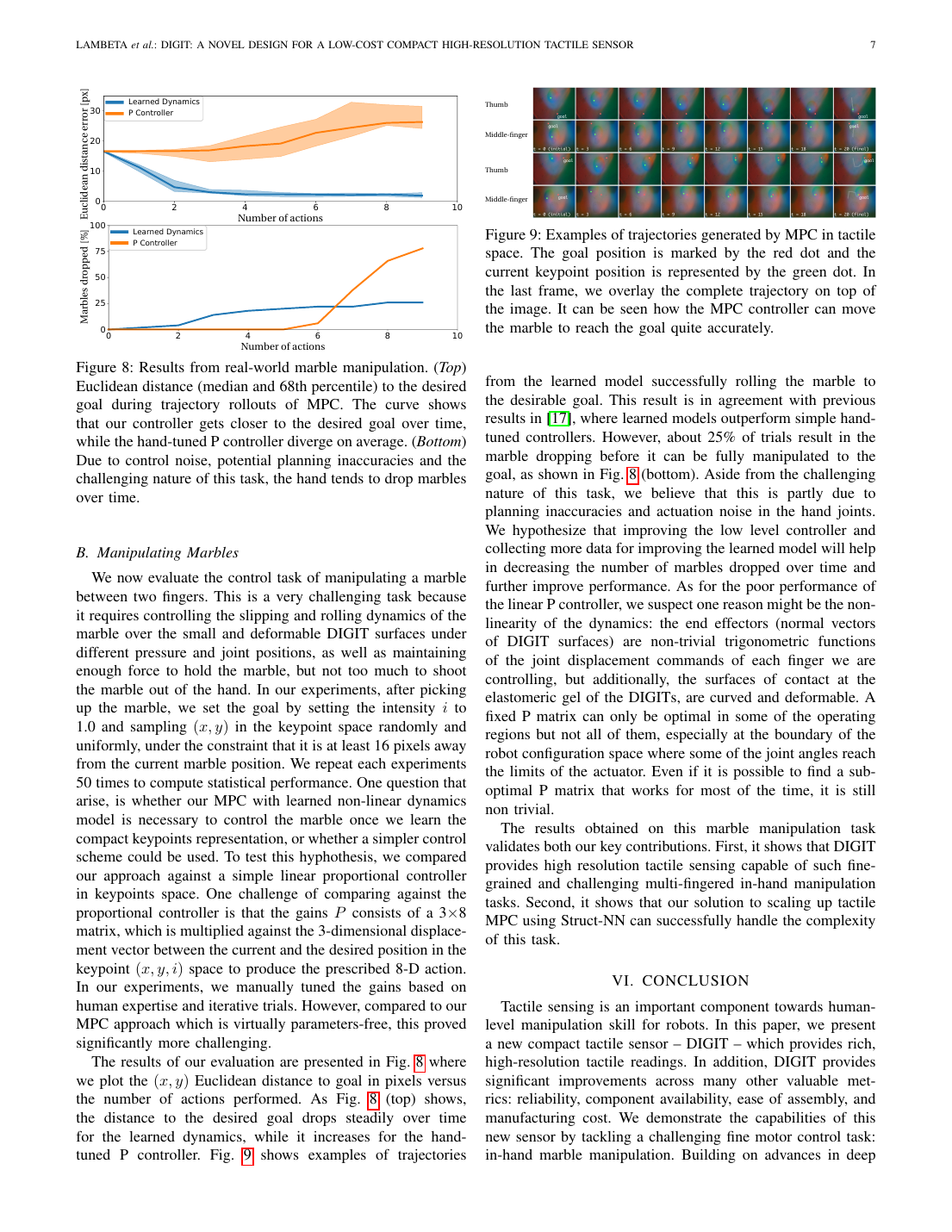
Struct-NN MPC와 P 제어기의 목표까지 유클리드 거리 및 구슬 낙하율 비교 (논문 PDF — p.7)
25% 낙하율이 높아 보일 수 있지만, 이 태스크의 난이도를 감안해야 한다: 20g의 유리 구슬을 6mm 직경 곡면 탄성 젤 두 개 사이에서 정밀 제어하는 것은 인간도 연습이 필요한 동작이다. 저자들은 낮은 수준 컨트롤러 개선과 추가 데이터 수집으로 낙하율을 낮출 수 있다고 지적한다.
P 제어기 실패의 근본 원인은 동역학의 비선형성이다. 손가락 서보 명령에서 DIGIT 표면의 접선 방향까지의 매핑은 삼각함수로 이루어진 복잡한 변환이며, 게다가 DIGIT 표면 자체가 곡면이고 변형된다. 단일 선형 행렬로 모든 구성 공간에서 최적이기를 기대하는 것은 무리다.
전체 시스템 흐름도
flowchart LR
subgraph Hardware["Hardware Platform"]
A1["Sawyer Arm"]
A2["Allegro Hand\n(4-finger)"]
A3["DIGIT x2\n(Thumb + Middle)"]
A1 --> A2 --> A3
end
subgraph DataCollection["Self-supervised Data Collection"]
B1["Random Action\nExploration\n4,800 trials"]
B2["Auto-reset\nMechanism\n(bowl + platform)"]
B1 <--> B2
end
subgraph Learning["Learning Pipeline"]
C1["Keypoint\nAutoencoder\n(ResNet-18 mini)"]
C2["State Compression\n640x480 img x2\n-> 14D vector"]
C3["MLP Dynamics\nModel f(s,a)->s'"]
C1 --> C2 --> C3
end
subgraph Control["Model Predictive Control"]
D1["CEM Optimizer\n250 particles\nHorizon T=10"]
D2["Cost:\nL2 distance\nin keypoint space"]
D1 --> D2
end
Hardware --> DataCollection
DataCollection --> Learning
Learning --> Control
Control --> Hardware
비판적 고찰: 강점과 한계
강점
1. 공학적 완성도와 오픈소스 공개
논문이 단순한 프로토타입 보고에 그치지 않고, 대량 생산을 고려한 설계 결정(injection molding, press-fit, 표준 부품)까지 상세히 기술한다. 설계를 www.digit.ml에 오픈소스로 공개한 것은 커뮤니티에 대한 실질적 기여다. 실제로 DIGIT는 이 논문 이후 촉각 센싱 연구의 사실상의 표준 플랫폼 중 하나가 되었다.
2. 내구성 개선의 정량적 검증
마모 테스트를 정량적으로 수행하고 비교한 것은 논문의 신뢰도를 높인다. “더 튼튼하다”는 주장을 수치로 뒷받침했다.
3. 알고리즘적 확장성
Struct-NN의 핵심 기여는 키포인트 추상화로 촉각 MPC를 단일 센서에서 멀티핑거 설정으로 확장한 것이다. CDNA 대비 50× 속도 향상은 실용성을 위한 필수적 개선이었다.
4. 자기지도 표현 학습의 통찰
K=8 키포인트 중 7개가 비활성화되고 1개가 구슬 위치를 정확히 추적했다는 결과는, 오토인코더가 태스크 관련 구조를 데이터로부터 스스로 발견했음을 보여준다. 이는 촉각 데이터에서의 비지도 표현 학습 가능성을 시사하는 흥미로운 관찰이다.
약점과 한계
1. 태스크의 제한적 범위
유리 구슬 하나를 두 손가락 사이에서 굴리는 것은 인-핸드 조작의 극히 일부다. 다양한 물체, 다양한 그립, 다양한 동작에 대한 일반화는 검증되지 않았다. 구슬이라는 태스크가 키포인트 표현에 특히 유리하게 작용했을 가능성이 있다(구형이라 하나의 (x,y,i)로 완전히 기술 가능).
2. 25% 낙하율
태스크의 난이도를 감안하더라도, 4번 중 1번 실패는 실용적 배치에는 부족하다. 저자들 스스로 이를 인정하고 향후 과제로 남겨두었지만, 현 시스템의 완성도를 보여주는 지표이기도 하다.
3. 촉각 이미지 해석의 깊이 부재
논문은 원시 촉각 이미지를 직접 해석하는 것보다는 키포인트로 압축해 사용한다. 이는 계산 효율을 위한 합리적 선택이지만, 센서 자체가 제공하는 풍부한 정보(표면 텍스처, 힘 분포, 변형 패턴)를 대부분 버리는 것이기도 하다.
4. 단일 태스크에 특화된 파이프라인
키포인트 오토인코더와 MPC 비용 함수는 구슬 위치 추적에 특화되어 있다. 새로운 태스크에 적용하려면 파이프라인 전체를 재설계해야 할 가능성이 높다. 태스크-독립적 촉각 표현을 위한 보다 범용적인 접근이 필요하다.
5. 센서 간 재현성 미검증
저자들은 대량 생산 재현성을 강조하지만, 실제로 여러 DIGIT 유닛 간의 교체 가능성(Sensor-to-sensor consistency)을 실험적으로 검증하지는 않았다. 촉각 센서에서 개별 젤의 특성 편차는 실용적으로 중요한 문제다.
관련 연구와의 비교
graph TD
A["Vision-based Tactile Sensors"] --> B["TacTip Family\n[13,14]\nMarker pins, low resolution"]
A --> C["FingerVision [10]\nTransparent gel, dual-use\nbut lower tactile resolution"]
A --> D["GelSight [11]\nHigh res, bulky\n35x60x35mm"]
A --> E["GelSlim [12]\nSlimmer but 50x205mm\nAlegro-incompatible"]
A --> F["DIGIT (This work)\n20x27x18mm\nAllegro-compatible\n$15/unit"]
G["Tactile Control Methods"] --> H["tactile-MPC [17]\nSingle sensor, 3-DOF\nCDNA-based, slow"]
G --> I["DIGIT + Struct-NN\nDual sensor, 8-DOF\n50x faster MPC"]
G --> J["OpenAI Dexterous\nManipulation [26]\nNo tactile, many cameras"]
style F fill:#2196F3,color:#fff
style I fill:#2196F3,color:#fff
DIGIT의 직접적 선조는 GelSight[11]와 GelSlim[12]이다. GelSight는 성능은 뛰어나지만 멀티핑거 핸드 장착이 불가능하다. GelSlim은 더 납작하지만 길이가 205mm로 손가락 끝에는 맞지 않는다. DIGIT는 이 두 센서가 열지 못한 멀티핑거 고해상도 촉각 조작의 문을 처음 열었다.
제어 알고리즘 측면에서 tactile-MPC[17]는 직접적 전신이다. DIGIT 논문은 이를 단일 센서 3-DOF 설정에서 이중 센서 8-DOF 설정으로 확장하는 것이 왜 어려운지(계산 비용), 그리고 Struct-NN이 어떻게 이를 해결하는지를 설명한다.
OpenAI의 Dexterous In-Hand Manipulation[26]과 비교하면 흥미롭다. OpenAI는 촉각 없이 수십 대의 추적 카메라로 손가락 상태를 추정하는 접근을 택했다. DIGIT는 반대로 촉각에서 직접 상태를 얻어 카메라 기반 추적의 의존성을 줄인다. 두 접근 모두 각자의 장단점이 있다.
요약 및 결론
DIGIT는 두 가지를 동시에 해냈다는 점에서 로봇공학 커뮤니티에 가치 있는 기여다.
하드웨어 측면: 고해상도 촉각 센싱을 멀티핑거 핸드에서 실용적으로 사용할 수 있게 만든 폼팩터의 소형화. 제조 비용($15)과 내구성(기존 대비 1,000×+) 개선은 실험실 프로토타입을 넘어 연구 플랫폼으로서의 지속 가능성을 의미한다.
알고리즘 측면: 키포인트 오토인코더를 통한 고차원 촉각 이미지의 태스크-관련 저차원 표현 압축, 그리고 이를 통한 멀티핑거 촉각 MPC의 실용적 구현. 50× 속도 향상이 단순한 엔지니어링 트릭이 아니라 시스템을 실시간 제어 가능/불가능으로 가르는 질적 차이를 만든다.
한계도 명확하다: 단일 태스크 검증, 25% 낙하율, 범용 촉각 표현 부재. 그러나 이 논문이 열어놓은 방향—고해상도 촉각 + 멀티핑거 + 학습 기반 제어—은 이후 많은 연구가 따라가게 될 길이다.
촉각 센싱이 로봇 조작의 보조 수단이 아닌 핵심 모달리티로 자리 잡기 위한 토대 작업으로서, DIGIT는 시기적절하고 잘 실행된 연구다.
참고문헌 (주요)
- [11] Yuan et al., “GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force,” Sensors, 2017
- [12] Donlon et al., “GelSlim: A High-Resolution, Compact, Robust, and Calibrated Tactile-Sensing Finger,” IROS, 2018
- [17] Tian et al., “Manipulation by Feel: Touch-Based Control with Deep Predictive Models,” ICRA, 2019
- [31] Minderer et al., “Unsupervised Learning of Object Structure and Dynamics from Videos,” NeurIPS, 2019
- [35] Finn et al., “Unsupervised Learning for Physical Interaction through Video Prediction,” NeurIPS, 2016