flowchart LR
subgraph SIM["Simulation Domain (Isaac Lab / MuJoCo)"]
A["Physics Engine\nContact State"] --> B["Multi-Mesh\nRay Caster"]
B --> C["Normal Projection\nDepth Calculation"]
C --> D["Vectorized Pipeline\n(GPU)"]
D --> E["Tacmap\n(Deform Map)"]
end
subgraph REAL["Real World Domain"]
F["VBTS\nRaw RGB Image"] --> G["Translation Model\nf_theta"]
G --> H["Tacmap\n(Deform Map)"]
end
subgraph TRAINING["Policy Training"]
E --> I["RL Policy\nPPO Training"]
end
subgraph DEPLOY["Deployment"]
H --> J["Trained Policy\nInference"]
end
subgraph RIG["Data Collection Rig"]
K["Automated\nData Collection"] --> L["Paired Dataset\n(image, gt_deform)"]
L --> G
end
I -.->|"Zero-Shot Transfer"| J
📃Tacmap 리뷰
tactile
dexterity
depth
sim2real
Bridging the Tactile Sim-to-Real Gap via Geometry-Consistent Penetration Depth Map
- 🗺️ Tacmap은 시뮬레이션과 실제 세계 간의 Tactile sim-to-real gap을 해소하기 위해 기하학적으로 일관된 penetration depth map인 ’deform map’을 도입한 고정밀, 고효율 촉각 시뮬레이션 프레임워크입니다.
- 🔄 이 프레임워크는 시뮬레이션에서 3D intersection volume을 depth map으로 계산하고, 실제 세계에서는 자동화된 데이터 수집 장비를 통해 raw tactile image에서 ground-truth depth map으로의 매핑을 학습함으로써 두 도메인을 통일된 기하학적 공간으로 정렬합니다.
- 🤖 Tacmap은 복잡한 조작 작업에서 sim-to-real zero-shot transfer를 가능하게 하여, 시뮬레이션에서 훈련된 정책이 물리적 로봇에 직접 적용될 수 있음을 입증합니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
Tacmap은 Vision-Based Tactile Sensors (VBTS)의 심투리얼 갭(sim-to-real gap)을 해소하기 위해 고안된 고충실도 및 계산 효율적인 촉각 시뮬레이션 프레임워크입니다. 기존의 촉각 시뮬레이션은 단순화된 기하학적 투영 방식이 물리적 진정성(physical authenticity)이 부족하거나, 고충실도 Finite Element Methods (FEM) 방식이 Reinforcement Learning (RL)을 위한 대규모 병렬 학습에 계산적으로 감당하기 어렵다는 딜레마에 직면해 있습니다. Tacmap은 이러한 문제를 해결하기 위해 부피 침투 깊이(volumetric penetration depth)를 핵심으로 하며, 시뮬레이션과 실제 세계를 공통의 deform map 표현을 통해 통합합니다.
이 프레임워크의 핵심 통찰은 원시 촉각 이미지가 센서 특유의 광학적 복잡성을 가지는 반면, 기저의 변형 맵(deform map)은 접촉 물리학을 위한 보편적인 프록시(proxy) 역할을 한다는 것입니다. Tacmap은 이 변형 맵을 중심으로 Sim-to-Real 간의 정렬을 수행하여 도메인 시프트를 최소화하고 물리적 일관성을 유지합니다.
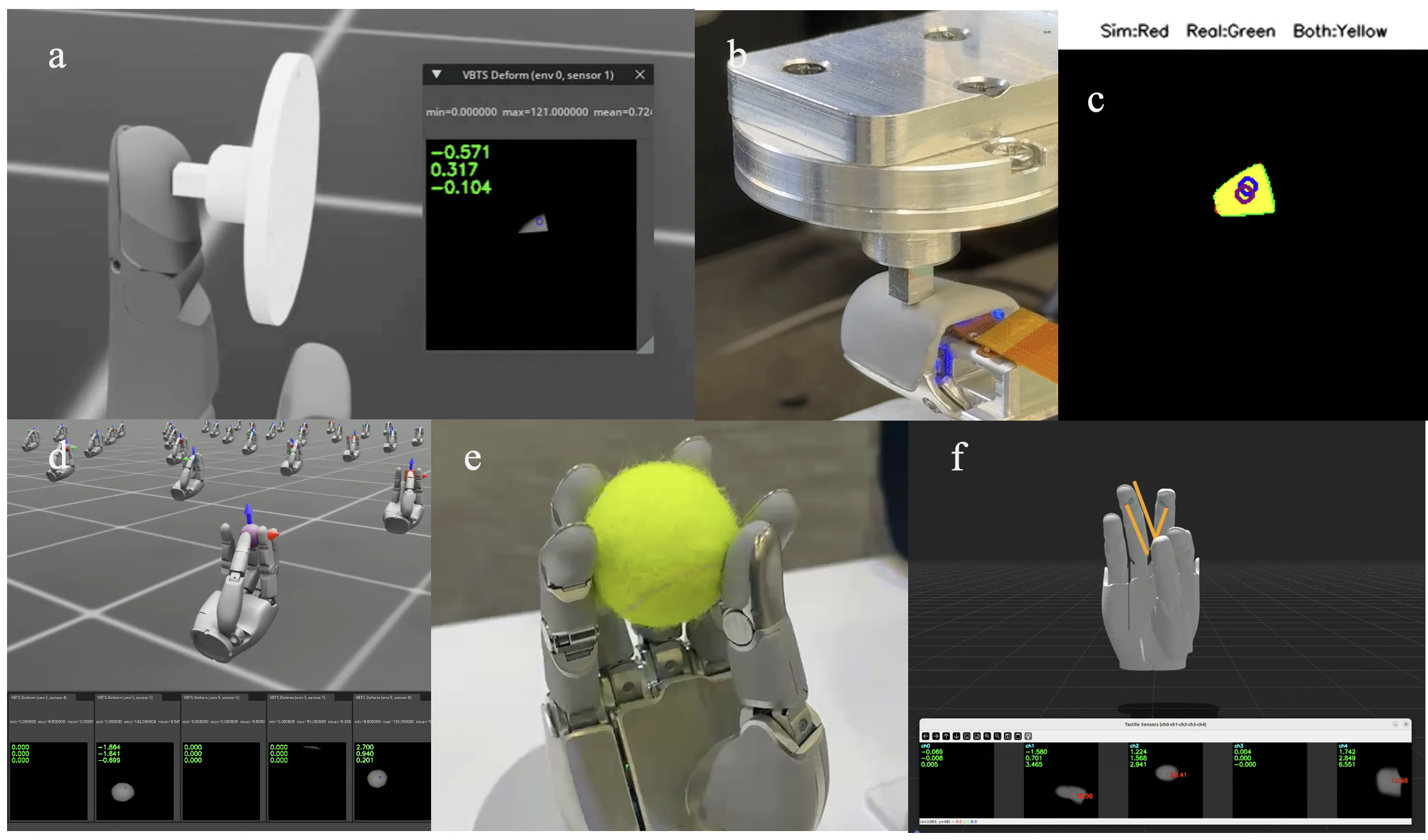
Tacmap 개요. 시뮬레이션의 3D 침투 부피 계산과 실세계의 원시 촉각 이미지가 공통의 변형 맵(deform map) 공간으로 통합되어, 시뮬레이션에서 훈련한 정책을 실제 로봇에 제로샷으로 전이한다.
핵심 방법론: 통합된 Deform Map (Tacmap)
Tacmap은 순 힘(Net Force, F), 접촉 위치(Contact Position, P), 그리고 핵심적인 deform map (M)이라는 세 가지 주요 촉각 정보를 제공합니다. deform map은 픽셀별 침투 깊이를 나타내며, 미세한 조작에 필수적인 고해상도 로컬 기하학적 정보를 포착합니다.
시뮬레이션에서 Deform Map 생성: Tacmap은 FEM의 막대한 계산 비용을 우회하면서 고충실도 기하학적 렌더링 파이프라인을 도입합니다. 센서의 엘라스토머(elastomer) 기하학은 ’변형되지 않은 센서 표면(undeformed sensor surface, S_u)’과 센서 외부에 고정된 오프셋으로 위치한 ’가상 감지 표면(virtual sensing surface, S_s)’이라는 두 가지 중요한 경계를 사용하여 정의됩니다. Deform map 생성을 위해, 감지 표면 S_s를 H x W 그리드로 이산화합니다. 각 그리드 포인트 (u, v)에 대해, 센서 내부를 향해 표면 노멀(surface normal)을 따라 S_s로부터 투영 광선(projection ray) r_{u,v}를 발사합니다. 변형 값 d(u, v)는 이 광선 상에서 객체 O의 점유(occupancy)를 기반으로 다음과 같이 계산됩니다: d(u, v) = \max(0, z_s - \max(z_u, z_o)) 여기서 z_s는 감지 표면 S_s 상에서 광선의 시작점의 좌표, z_u는 변형되지 않은 물리적 센서 표면 S_u의 좌표, 그리고 z_o는 광선 r_{u,v}와 객체 메시(object mesh) O 사이의 첫 번째 교차점의 좌표입니다. 이 접근 방식은 촉각 피드백을 순수하게 기하학적인 deform map으로 추상화하여, 기저의 접촉 물리학을 센서 특유의 광학적 아티팩트(optical artifacts)로부터 분리합니다.
실세계에서 Deform Map 생성: 실세계에서 로봇이 시뮬레이션과 동일한 변형 표현을 인식하도록 하기 위해, Tacmap은 원시 촉각 프레임에서 deform map을 추론하는 변환 파이프라인을 개발했습니다. 이는 자동화된 데이터 수집 시스템을 통해 이루어집니다. 이 시스템은 고정밀 3축 모션 스테이지(3-axis motion stage)를 사용하여 센서와 다양한 기하학적 압입기(geometric indenters) 간의 상호작용을 제어된 조건에서 기록합니다. 각 압축에 대해, 압입기의 정확한 3D 자세 T_{tool}은 센서의 기준 프레임에 대한 스테이지의 인코더(encoder)를 통해 기록됩니다. 실세계 deform map은 시뮬레이션 맵과 동일한 기하학적 투영 논리를 사용하여 계산되어, D = \{(I^{(i)}_{raw}, M^{(i)}_{gt})\}_{i=1}^N 형태의 동기화된 데이터셋을 형성합니다. 수집된 데이터셋을 사용하여, ResNet 기반 인코더-디코더(encoder-decoder) 아키텍처인 변환 네트워크 \Phi가 훈련되어 단일 촉각 이미지 I_{raw}로부터 deform map \hat{M} = \Phi(I_{raw})을 생성합니다. 네트워크는 예측된 \hat{M}과 운동학적으로 파생된 M_{gt} 간의 픽셀별 평균 제곱 오차(MSE)를 최소화하도록 훈련됩니다. 이러한 방식은 실세계 네트워크를 기하학적 깊이로 지도함으로써 센서의 광학적 특성을 접촉 물리학으로부터 분리하고, M_{sim}과 \hat{M}이 동일한 물리적 기준(침투 깊이)에 고정되도록 하여 공통의 도메인 불변 공간에 존재하게 합니다.
구현 및 실험 결과:
Tacmap은 Isaac Lab과 MuJoCo 모두에 통합되어 광범위한 호환성과 확장성을 제공합니다. 시스템 초기화 시, Multi-Mesh Ray Caster를 활용하여 변형되지 않은 센서 표면에 촉각 감지 포인트(Tactile Sensing Points)와 감지 방향(Sensing Directions)의 밀집 그리드를 미리 정의합니다. 런타임에는 GPU 가속 Ray-casting을 사용하여 기하학적 상호 침투(interpenetration)를 병렬로 계산합니다.
실험에서는 SharpaWave 덱스터러스 핸드(dexterous hand)에 장착된 Vision-based Tactile Sensors (DTC)를 사용했습니다.
- Sim-to-Real 충실도: 시뮬레이션과 실제 세계 간의 순 힘 정렬(Net Force Alignment)에서 높은 상관관계를 보였고, deform map의 시각화는 놀라운 구조적 유사성을 나타냈습니다. 정량적 평가에서 Tacmap은 Contact Position Error (최대 0.96mm), Deform Depth Error (최대 18.53%), Net Force L2 Error (최대 0.61N), Deform IoU (최소 85.67%) 등 낮은 도메인 불일치를 보여주어, 제로샷 정책 전이(zero-shot policy transfer)에 충분한 수준임을 입증했습니다.
- 계산 효율성: Isaac Lab 프레임워크 내에서 GPU 메모리 사용량은 Ray-casting 방식 덕분에 거의 선형적으로 증가하며(Fig 6. 좌측), 전체 시뮬레이션 처리량(throughput)에 대한 렌더링의 영향은 미미하여(Fig 6. 우측), 대규모 병렬 RL에 적합한 스텝 주파수(stepping frequency)를 유지했습니다.
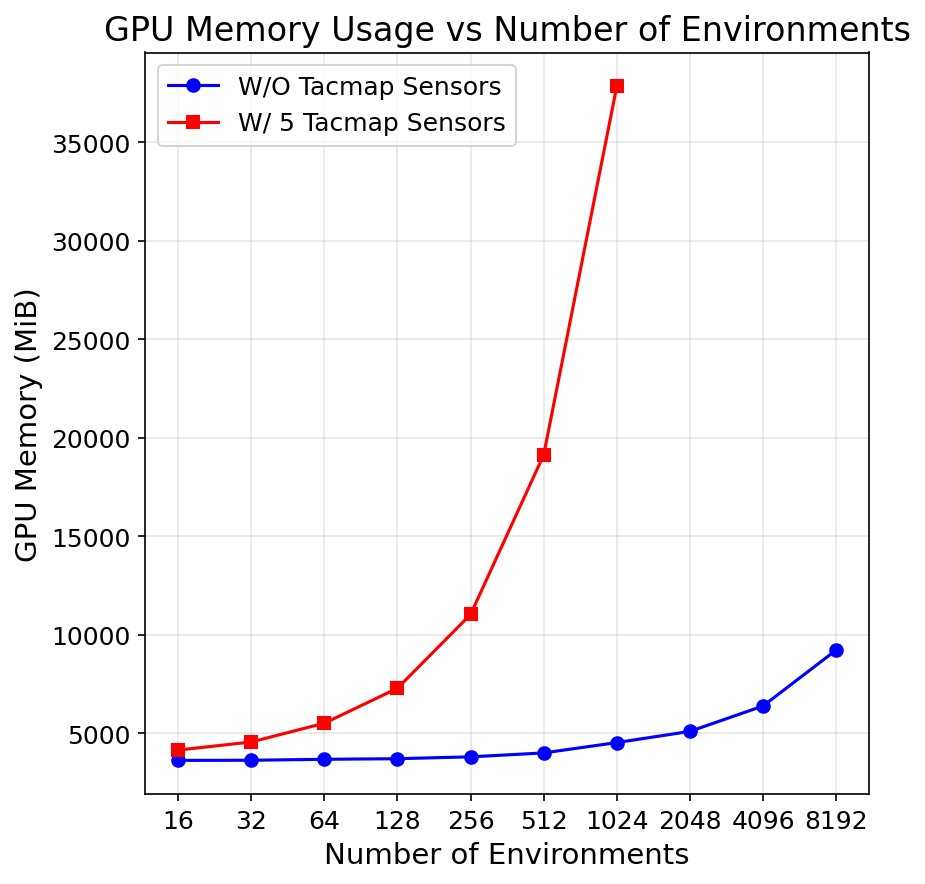
병렬 환경 수에 따른 GPU 메모리 사용량. 레이캐스팅 기반 렌더링 덕분에 메모리가 거의 선형적으로 증가하여 대규모 병렬 환경으로 확장 가능하다.
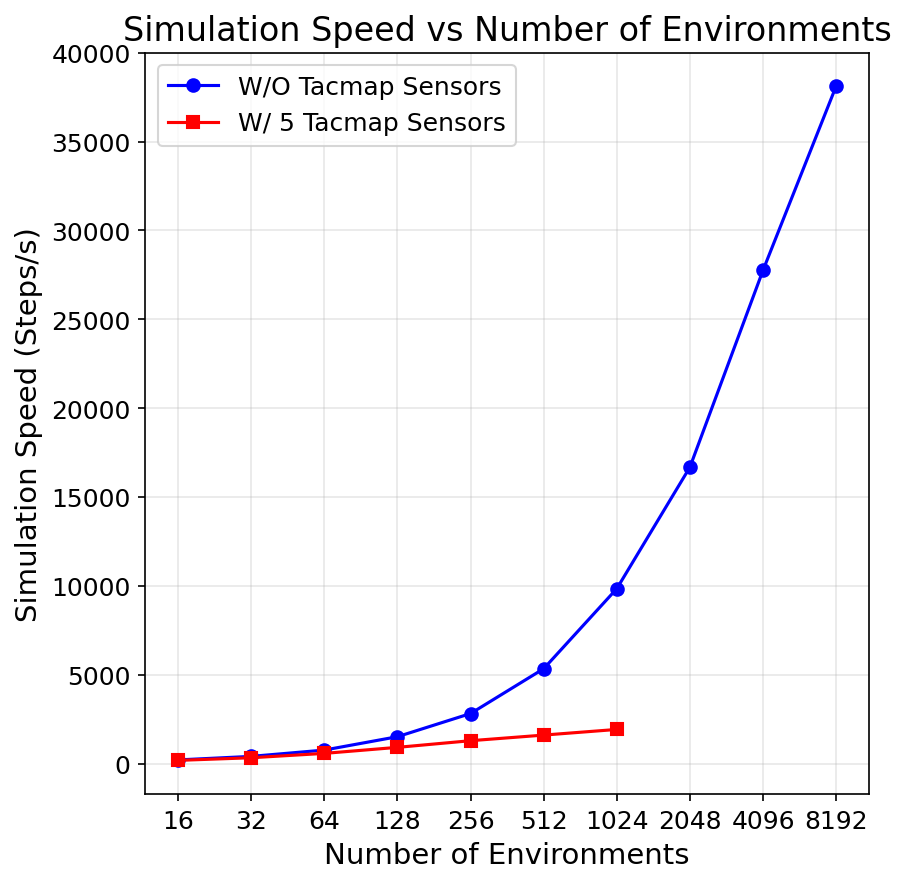
시뮬레이션 처리량(throughput) 비교. Tacmap 렌더링이 전체 스텝 주파수에 미치는 영향이 미미하여 대규모 병렬 RL 훈련에 적합함을 보여준다.
- Sim-to-Real 적용: Tacmap의 실용적 유용성은 복잡한 손안 객체 회전(in-hand object rotation) 작업을 통해 입증되었습니다. Tacmap 스트림을 관측 공간으로 사용하여 시뮬레이션에서 Proximal Policy Optimization (PPO)으로 훈련된 정책은 실제 세계 SharpaWave 덱스터러스 핸드에 아무런 도메인 적응(domain adaptation) 없이 제로샷으로 배포되어 성공적으로 작동했습니다.
한계 및 향후 연구:
Tacmap은 노멀 침투 깊이에 중점을 두지만, 엘라스토머 표면을 가로지르는 접선력 분포(tangential force distribution), 즉 전단 변형률(shear strain)을 명시적으로 모델링하지는 않습니다. 이는 미세한 미끄러짐(micro-slips)과 측면 힘을 포착하는 데 필수적입니다. 향후 연구에서는 하드웨어 센서와 Tacmap 프레임워크를 공동으로 설계하여 다차원 힘 필드 표현을 통합할 계획입니다. 또한, 객체 메시(object meshes)의 복잡성이 증가함에 따라 Ray-casting 오버헤드가 증가할 수 있으므로, 대규모 병렬 환경에서 침투 깊이 계산의 지연 시간(latency)을 더욱 줄이기 위한 고급 가속 구조체(acceleration structures) 탐색을 고려하고 있습니다.
결론적으로, Tacmap은 시뮬레이션과 실제 세계를 연결하는 고충실도 및 계산 효율적인 촉각 시뮬레이션 툴킷을 제공하며, 복잡한 로봇 조작에 필요한 필수 접촉 특성을 효과적으로 포착합니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
1. 서론: 촉각이라는 감각, 그리고 시뮬레이션의 한계
손으로 물건을 잡을 때 우리가 무의식적으로 하는 일을 생각해보자. 손가락 끝의 피부가 미세하게 눌리고, 그 압력 분포를 통해 물체의 형상, 미끄러짐 여부, 접촉이 얼마나 안정적인지를 실시간으로 파악한다. 눈을 감고도 달걀을 깨뜨리지 않고 들 수 있는 것은 순전히 이 촉각 피드백 덕분이다.
로봇도 이 능력을 갖추어야 한다. 특히 다지 조작(dexterous manipulation)을 목표로 하는 연구에서, 시각 기반 촉각 센서(Vision-Based Tactile Sensor, VBTS)는 핵심 하드웨어가 되었다. GelSight, DIGIT 등의 VBTS는 탄성 겔패드(elastomer gel pad)가 접촉 시 변형되는 모습을 내장 카메라로 촬영해 고해상도의 접촉 지형도를 제공한다. 접촉 면적, 법선력 분포, 심지어 전단력(shear force)에 의한 마커 이동까지 포착할 수 있다.
문제는 시뮬레이션에 있다. 강화학습(RL)으로 촉각 기반 정책을 훈련하려면 수백만 번의 접촉 경험이 필요한데, 실제 하드웨어로 이를 수집하는 것은 비현실적이다. 시뮬레이터가 필요한 이유다. 그런데 시뮬레이션된 촉각 신호를 실제 센서에 그대로 적용하면 정책이 제대로 동작하지 않는다. 이것이 촉각 sim-to-real 간극(tactile sim-to-real gap)이다.
이 간극을 메우기 위한 기존 접근법은 크게 세 가지였다:
- 경험적 방법(Empirical, e.g., Taxim): 실제 데이터로 모델을 학습. 분포를 벗어나면 일반화에 약함.
- 해석적 방법(Analytical, e.g., TACTO): 표준 래스터라이저로 깊이 맵을 렌더링. 빠르지만 엘라스토머의 체적 보존(volume-preserving) 특성을 무시해 물리적 진실성이 낮음.
- 물리 기반 방법(Physics-based, e.g., FEM): 유한요소법으로 고정밀 변형 계산. 정확하지만 RL에 쓰기엔 비현실적으로 느림.
이 딜레마를 해결하기 위해 등장한 논문이 바로 Tacmap이다.
핵심 아이디어는 단순하지만 강력하다: 시뮬레이션과 실제 세계를 하나의 공통 표현 공간(shared representation space)으로 통일시키자. 그 공간은 바로 침투 깊이 기반의 변형 맵(penetration depth-based deform map)이다.
2. 방법론: Tacmap의 구조와 작동 원리
2.1 핵심 직관: “측정 단위를 맞추면 비교가 된다”
물리학에서 단위계를 통일하는 것만큼 중요한 일이 없다. 섭씨와 화씨를 직접 비교하면 의미가 없듯, 시뮬레이션의 깊이 버퍼(depth buffer)와 실제 카메라 이미지의 RGB 픽셀을 직접 비교하는 것은 불가능에 가깝다.
Tacmap은 이 발상을 뒤집는다. “원시 촉각 이미지는 센서마다 다르고 광학적으로 복잡하지만, 그 이면의 접촉 변형 맵(deformation map)은 물리적 접촉의 보편적 대리자(universal proxy)가 될 수 있다.”
즉: - 시뮬레이션 도메인: 강체 물체와 센서 엘라스토머 사이의 3D 침투 부피(intersection volume)를 깊이 맵으로 계산 → Tacmap 생성 - 실제 도메인: 자동화된 데이터 수집 장치(automated data-collection rig)로 실제 접촉 시의 ground-truth 변형을 측정하고, 이를 이용해 원시 촉각 이미지 → 변형 맵 변환 모델을 학습
두 도메인 모두 같은 “변형 맵” 공간으로 투영되므로, 도메인 시프트(domain shift)가 크게 줄어든다.
[Simulation Domain] [Real World Domain]
Physics Engine VBTS Raw Image
| |
Intersection Translation Model
Volume Calc. (image -> deform)
| |
Tacmap (deform map) <-------- same space -----> Tacmap (deform map)
| |
RL Policy Training Policy Deployment2.2 시뮬레이션 측: 효율적인 침투 깊이 계산
시뮬레이션에서 Tacmap을 생성하는 파이프라인은 다음과 같다.
초기화 단계: Multi-Mesh Ray Caster
시스템 초기화 시, 변형 전 센서 표면(undeformed sensor surface) 위에 촉각 감지점(Tactile Sensing Points)의 밀집 격자(dense grid)와 해당 감지 방향(Sensing Directions)을 미리 정의한다.
이 설계의 핵심은 촉각 감지의 기하학적 해상도를 물리 충돌 메시(physics collision mesh)로부터 분리(decouple)한다는 점이다. 덕분에 물리 솔버의 수치 안정성을 희생하지 않고 고해상도 촉각 피드백을 얻을 수 있다.
침투 깊이 계산: 법선 투영 공간(Normal Projection Space)
기존 평면 센서 시뮬레이터들은 Z축 방향으로의 단순 투영을 사용한다. 이 방식은 평면 센서에는 어느 정도 적합하지만, 곡면 센서(curved fingertip)에는 큰 투영 오차(projection artifact)를 유발한다.
Tacmap은 각 감지점에서 표면 법선 방향(surface normal direction)으로 레이를 쏘아 물체와의 교차 깊이를 계산하는 일반화된 법선 투영 공간을 사용한다.
d(\mathbf{p}) = \max\left(0,\ \mathbf{n}(\mathbf{p}) \cdot (\mathbf{x}_{\text{obj}} - \mathbf{p})\right)
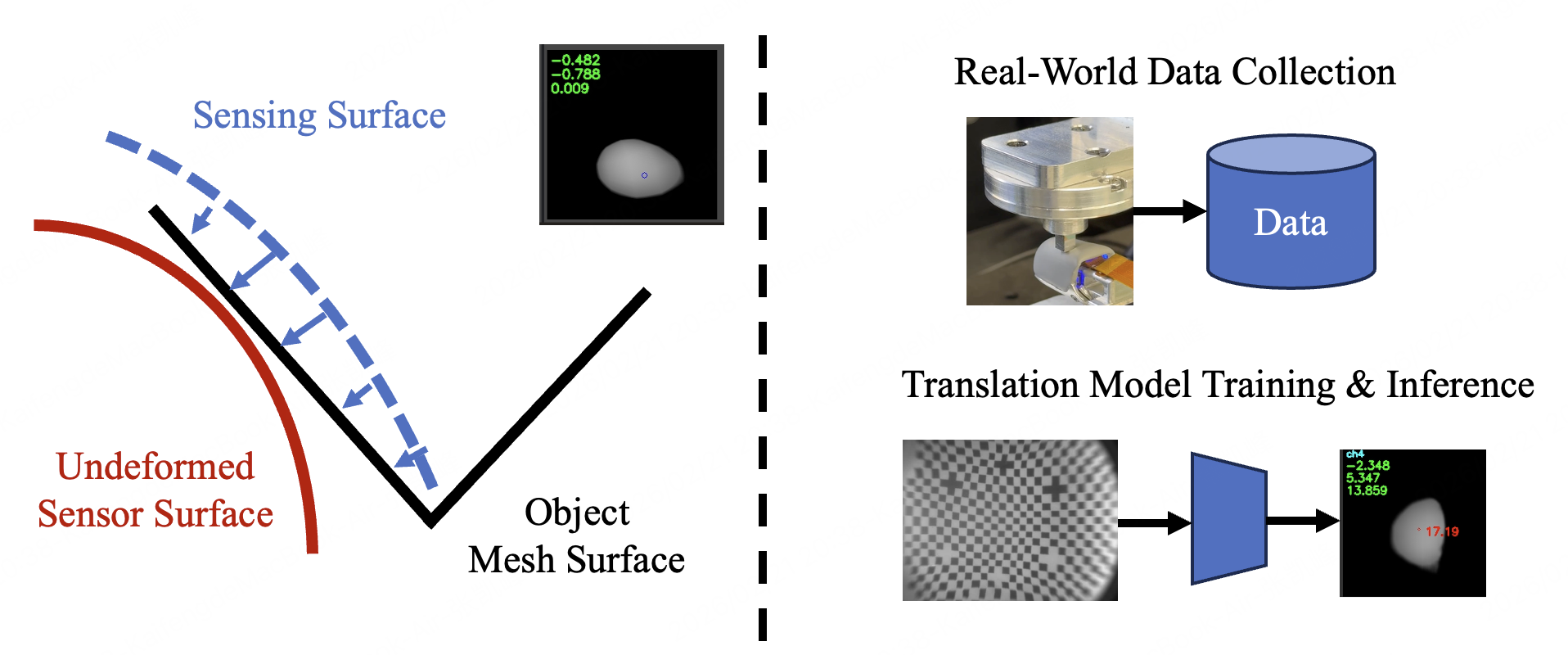
Tacmap 방법론. 변형되지 않은 센서 표면과 가상 감지 표면의 이중 표면 모델에서 표면 법선 방향으로 레이를 발사해 객체와의 침투 깊이를 계산하고, 이를 기하학적 변형 맵으로 합성한다.
여기서: - \mathbf{p}: 센서 표면 위의 감지점 위치 - \mathbf{n}(\mathbf{p}): 해당 점에서의 표면 법선 벡터 - \mathbf{x}_{\text{obj}}: 물체 표면에서 해당 레이가 교차하는 점
이 공식은 물체가 얼마나 “파고들었는지”를 법선 방향으로 측정한다. 평면 센서의 경우 모든 법선이 Z축과 같으므로 기존 방법과 동일해지고, 곡면 센서의 경우 자연스럽게 일반화된다.
벡터화 파이프라인과 GPU 가속
원시 교차 데이터는 벡터화된 파이프라인(vectorized pipeline)을 통해 변형 맵으로 합성된다.
- Isaac Lab: 고성능 Raycaster API를 활용해 수천 개의 병렬 환경에서 대규모 렌더링 지원
- MuJoCo:
mj전용 툴킷으로 구현
전체 렌더링 프로세스를 GPU에 오프로드함으로써 높은 주파수의 렌더링을 달성하면서도 실제 물리 측정과의 구조적 정렬(structural alignment)을 유지한다.
이중 표면 기하 모델(Dual-Surface Geometric Model)
접촉 시 센서 겔패드가 어떻게 변형되는지를 모델링하기 위해 이중 표면 구조를 사용한다. 이 모델은 접촉 영역에서의 겔패드 변형을 기하학적으로 근사하며, Isaac Lab 및 MuJoCo 내에서 물리 엔진에 직접 인스턴스화된다.
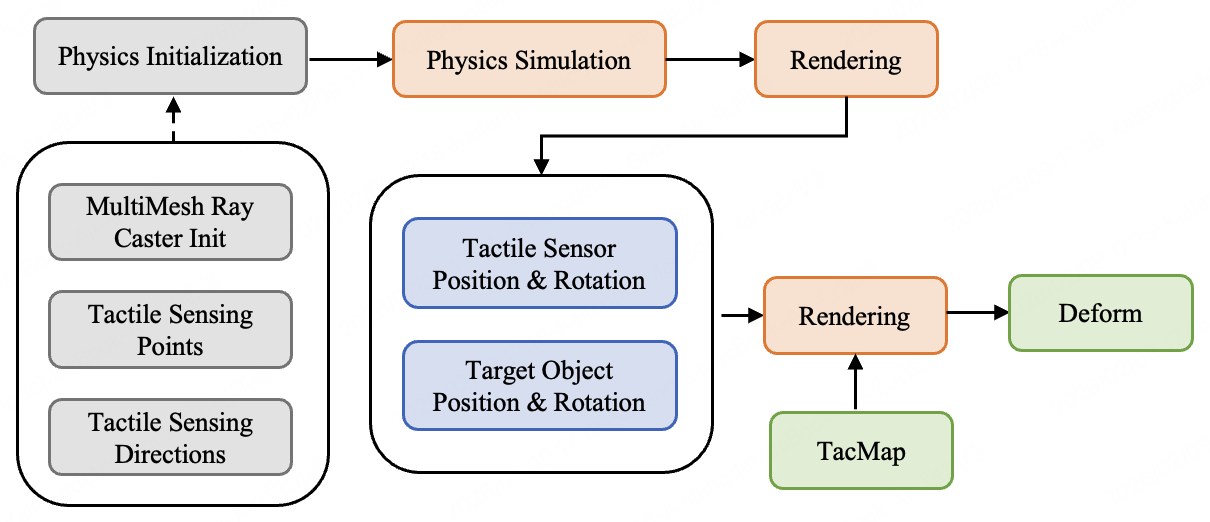
Isaac Lab과 MuJoCo에 통합된 Tacmap 구현 파이프라인. 초기화 시 변형되지 않은 센서 표면 위에 촉각 감지점과 감지 방향의 밀집 격자를 미리 정의하고, 런타임에 GPU 가속 레이캐스팅으로 침투를 병렬 계산한다.
2.3 실제 세계 측: 자동화된 데이터 수집과 변환 모델
실제 VBTS가 출력하는 것은 원시 RGB 이미지다. 이것을 변형 맵으로 변환하기 위해 두 단계가 필요하다.
Ground-Truth 획득: 자동화된 데이터 수집 장치
논문에서는 실제 물체와 센서의 접촉 중에 ground-truth 변형을 측정할 수 있는 자동화된 데이터 수집 장치(automated data-collection rig)를 개발했다. 이 장치는 다양한 물체, 다양한 접촉 각도와 깊이에서 대규모 쌍(pair) 데이터를 수집한다:
\mathcal{D} = \{(I_{\text{raw}}^{(i)},\ \mathbf{D}_{\text{gt}}^{(i)})\}_{i=1}^{N}
여기서 I_{\text{raw}}는 원시 촉각 이미지, \mathbf{D}_{\text{gt}}는 실제 변형 맵이다.
변환 모델 학습
이 데이터셋으로 f_\theta: I_{\text{raw}} \to \hat{\mathbf{D}} 를 학습한다. 실제 배포 시에는:
\hat{\mathbf{D}}_{\text{real}} = f_\theta(I_{\text{raw}})
로 원시 이미지를 변형 맵으로 실시간 변환하고, 이를 RL 정책의 입력으로 사용한다.
2.4 전체 시스템 파이프라인
3. 기술적 세부 사항: 각 구성 요소 심층 분석
3.1 왜 “침투 깊이”인가?
FEM은 접촉 역학을 매우 정확히 계산하지만, 각 노드의 변위를 반복적으로 풀어야 하므로 수천 개의 병렬 환경에서는 사용 불가능하다. 반면 단순 래스터라이저는 엘라스토머가 “물처럼” 변형한다는 비현실적 가정을 내포한다.
침투 깊이는 중간 지점을 찾는 영리한 선택이다. 강체(rigid body)와 다른 강체가 겹치는 부분의 깊이는, FEM 없이도 물리 엔진의 충돌 감지 단계에서 자연스럽게 얻을 수 있다. 이 값은 엘라스토머가 물체에 의해 얼마나 압축되었는지에 대한 기하학적 근사이며, 실제 엘라스토머의 변형과 높은 상관관계를 보인다.
3.2 법선 투영 공간의 중요성
기존의 평면 센서 시뮬레이터(TACTO 등)는 암묵적으로 모든 픽셀의 감지 방향이 동일하다고 가정한다. 이는 GelSight 같은 평판형 센서에는 무난하지만, 손가락 끝(fingertip)처럼 곡면을 가진 센서에는 심각한 기하학적 왜곡을 초래한다.
예를 들어, 구형 fingertip 센서의 가장자리에서 발생한 접촉을 Z축으로 투영하면, 실제 접촉 깊이보다 훨씬 작게 측정된다. 이는 정책 학습에 체계적인 편향(systematic bias)을 유발한다.
법선 투영 공간을 사용하면 각 감지점이 자신의 법선 방향으로 측정하므로, 센서 표면의 형상에 무관하게 일관된 물리적 의미를 갖는 침투 깊이를 얻을 수 있다.
3.3 변환 모델의 역할
실제 VBTS 이미지에는 조명, 마커, 겔패드의 광학적 특성 등 물리 접촉 이외의 수많은 요소가 담겨 있다. 변환 모델 f_\theta는 이 “광학적 노이즈”를 제거하고, 물리적으로 의미 있는 변형 정보만 추출하는 역할을 한다.
핵심은 이 변환이 학습하기 쉽다는 점이다. 인풋(원시 이미지)과 타겟(ground-truth 변형 맵) 모두 동일한 접촉 이벤트에서 나온 것이므로, 강한 대응 관계(strong correspondence)가 존재한다. 학습 데이터는 자동화된 장치로 대규모로 수집할 수 있어 수동 레이블링이 필요 없다.
4. 실험: 무엇을 측정하고, 어떤 결과를 얻었나
4.1 실험 설정
| 구성 요소 | 세부 사항 |
|---|---|
| 하드웨어 플랫폼 | SharpaWave 다지 핸드 (DTC 비전 기반 촉각 센서 탑재) |
| 시뮬레이터 | Isaac Lab, MuJoCo (Tacmap 통합) |
| 비교 지표 | 시뮬레이션 vs 실제의 변형 맵 정량적 비교 |
| 다운스트림 태스크 | In-hand 구 회전(ball rotation) |
| 정책 학습 알고리즘 | PPO (Proximal Policy Optimization) |
| 물체 데이터셋 | 다양한 형상의 물체 라이브러리 (실린더, 정사각형 등) |
4.2 실험 1: 변형 맵의 정확도 평가
설정: 동일한 상대적 접촉 위치에서 시뮬레이션과 실제 세계의 변형 맵을 직접 비교.
결과: Tacmap의 변형 맵이 실제 측정값을 밀접하게 반영함을 정량적으로 확인했다. 특히: - 실린더(cylinder) 접촉과 정사각형(square) 접촉 모두에서 순 힘(net force) 비교가 시뮬레이션과 실제 세계 간에 높은 일치도를 보였다 (Figure 4 참조). - 다양한 접촉 시나리오에서 변형 맵의 공간적 패턴(spatial pattern)이 잘 보존된다.
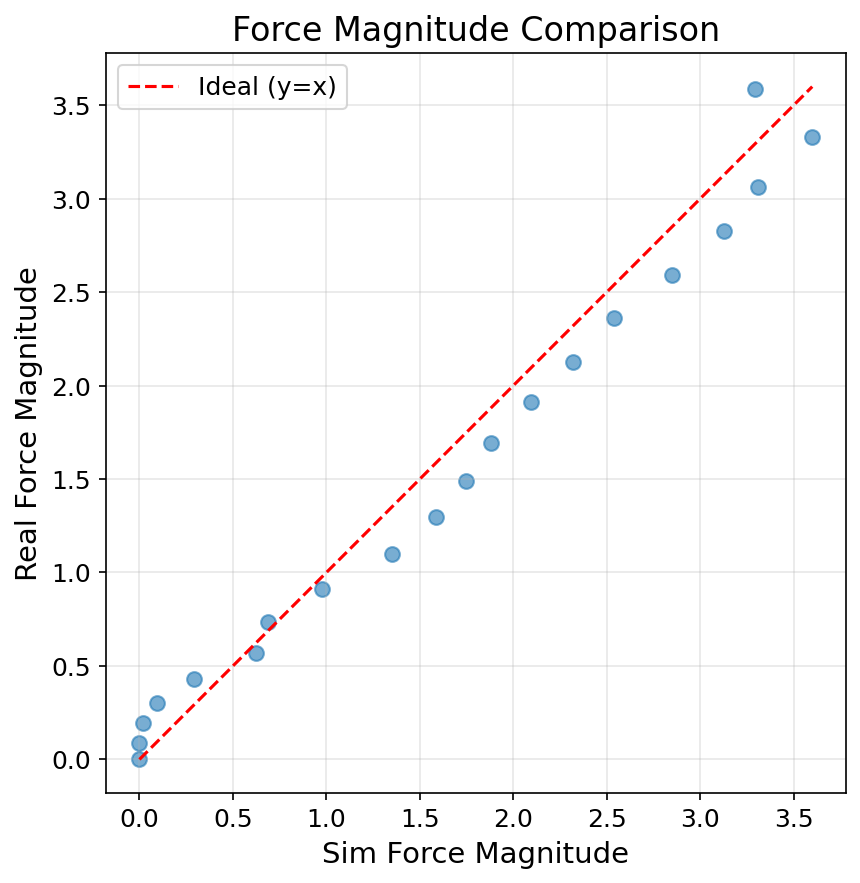
실린더(cylinder) 압입에 대한 순 힘 정렬. 시뮬레이션과 실제 세계의 순 힘이 높은 상관관계를 보인다.
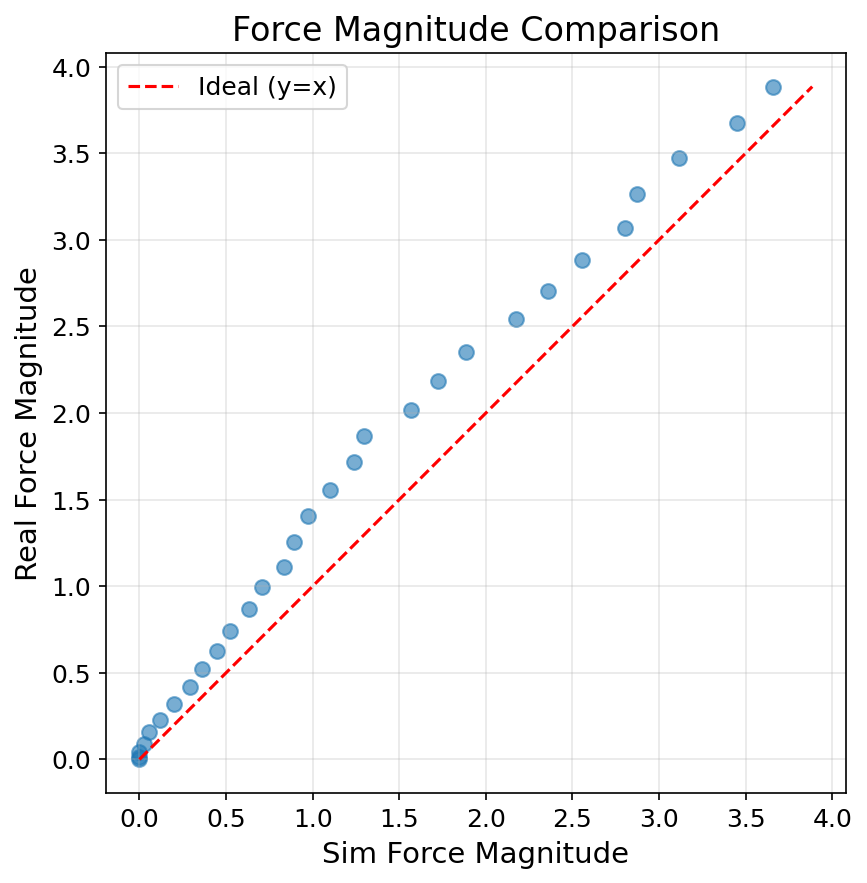
정사각형(square) 압입에 대한 순 힘 정렬. 실린더 케이스와 마찬가지로 시뮬레이션과 실세계 간 낮은 도메인 불일치를 확인할 수 있다.
의미: 기존 TACTO 스타일의 단순 깊이 버퍼 렌더링은 엘라스토머의 체적 보존 특성을 무시하기 때문에 접촉 가장자리에서 변형이 실제보다 과장되거나 과소 표현된다. Tacmap의 침투 깊이 기반 계산은 이 편향을 현저히 줄인다.
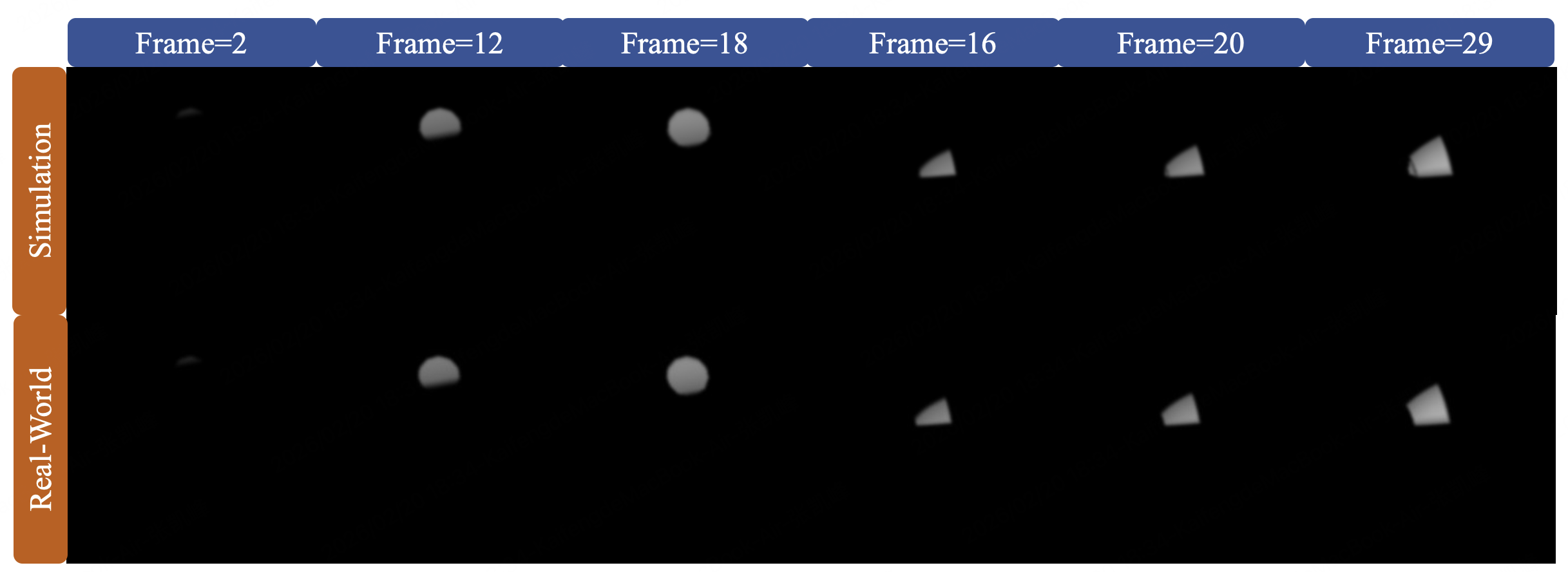
시뮬레이션과 실세계 변형 맵의 시각적 비교. 다양한 접촉 형상에서 두 도메인의 변형 맵이 놀라운 구조적 유사성을 보이며, 공통의 도메인 불변 공간에 정렬되어 있음을 보여준다.
4.3 실험 2: In-hand 구 회전 태스크 (Zero-Shot Transfer)
이 실험이 논문의 하이라이트다. 복잡한 contact-rich 태스크에서 sim-to-real 전이가 실제로 가능한지 검증한다.
태스크 정의: 다지 핸드가 구형 물체를 연속적으로 회전시키면서 파지 안정성을 유지. 이 태스크는 미세한 접촉 전환(contact transition)과 실시간 힘 조절이 필요한 고난이도 조작이다.
훈련: 시뮬레이션에서만 PPO로 훈련. 관측 공간에는 실시간 Tacmap 스트림이 포함되어, 에이전트가 접촉 다양체(contact manifold)의 밀집 기하 정보를 받는다. 고처리량 렌더링 덕분에 수백만 건의 다양한 접촉 상호작용에 노출된다.
배포: 실제 SharpaWave 핸드에 어떠한 fine-tuning이나 도메인 적응 없이 직접 배포.
결과: - 에이전트가 변환 모델을 통해 실제 촉각 이미지를 변형 맵으로 해석하고, 구 회전 태스크를 성공적으로 수행함. - 시뮬레이션 내에서 실제 상호작용 데이터를 리플레이(replay)하여 시뮬레이션 환경이 실제와 일관성을 가짐을 재차 검증 (Figure 1(f)).
sequenceDiagram
participant Sim as Simulation (PPO Training)
participant Policy as Trained Policy
participant Real as Real Robot (SharpaWave)
participant TransModel as Translation Model
Sim->>Policy: Train with Tacmap stream (millions of steps)
Note over Sim,Policy: Only simulation data used
Real->>TransModel: Raw VBTS image (DTC sensor)
TransModel->>Policy: Deform map (same space as sim)
Policy->>Real: Motor commands
Real->>Real: Successful ball rotation (zero-shot)
4.4 시뮬레이션 내 실제 데이터 리플레이
논문의 Figure 1(f)에 해당하는 검증 실험도 인상적이다. 실제 로봇 상호작용 데이터를 시뮬레이션 환경 내에서 리플레이함으로써, Tacmap이 시뮬레이션 측에서도 실제 물리 측정과 일관성이 있음을 보인다. 이는 단방향(sim→real)이 아닌 양방향 검증을 제공한다.
5. 관련 연구와의 비교
5.1 기존 촉각 시뮬레이터 분류
| 방법 | 대표 연구 | 속도 | 물리 정확도 | 곡면 지원 | RL 적합성 |
|---|---|---|---|---|---|
| 경험적 | Taxim | 빠름 | 중간 | 제한적 | 부분적 |
| 해석적 | TACTO | 매우 빠름 | 낮음 | 낮음 | 적합 |
| FEM 기반 | Narang et al., Ding et al. | 매우 느림 | 매우 높음 | 가능 | 부적합 |
| GPU 가속 + 해석적 | TacSL | 매우 빠름 | 중간 | 중간 | 적합 |
| 침투 깊이 | Tacmap (본 논문) | 빠름 | 높음 | 네이티브 지원 | 적합 |
5.2 Taxim과의 비교
Taxim은 GelSight 센서에 특화된 경험적 모델로, 다항식 룩업 테이블(polynomial look-up table)을 이용해 접촉 기하를 픽셀 강도로 변환한다. 마커 운동 시뮬레이션도 포함하여 포괄적인 프레임워크를 제공한다.
그러나 특정 데이터 분포에 의존하기 때문에, 학습 시 보지 못한 물체 형상에 대한 일반화가 떨어진다. 또한 GelSight 계열 센서에 특화되어 있어 다른 센서로의 전이가 어렵다.
Tacmap은 데이터 의존성을 최소화하면서도(시뮬레이션 측은 순수 기하 계산) 실제 도메인과의 정렬을 학습된 변환 모델로 달성한다.
5.3 TACTO와의 비교
TACTO는 PyBullet 등의 강체 물리 엔진에 표준 래스터라이저를 결합한 해석적 방법이다. 확장성 있는 솔루션을 제공하지만, 엘라스토머 변형을 단순 깊이 매핑으로 단순화하여 물리적 진실성이 낮다. 특히 엘라스토머의 측면 변형(lateral deformation)과 체적 보존 효과를 전혀 포착하지 못한다.
Tacmap은 이 지점에서 명확히 앞선다. 법선 방향 침투 깊이 계산은 TACTO의 깊이 버퍼보다 물리적으로 의미 있는 표현이며, 곡면 센서에서의 투영 아티팩트도 제거된다.
5.4 TacSL과의 비교
TacSL은 NVIDIA Isaac Gym을 활용한 GPU 가속 촉각 시뮬레이터로, 200× 이상의 CPU 대비 속도 향상을 달성한다. Kelvin-Voigt 접촉 모델을 사용해 물리적 변형을 근사하고, 텐서화된 깊이-RGB 매핑으로 이미지를 합성한다.
TacSL은 매우 인상적인 성능을 보이지만, 엘라스토머를 단순 스프링-댐퍼 시스템으로 모델링하여 복잡한 접촉 시 국소 디테일이 부족할 수 있다. 또한 RGB 이미지를 최종 출력으로 사용하므로, 광학적 렌더링의 복잡성이 여전히 sim-to-real 간극의 요인이 된다.
Tacmap은 광학적 렌더링 자체를 우회한다. 변형 맵이라는 중간 표현을 통해 센서별 광학 특성을 분리(decouple)함으로써 더 범용적인 접근을 제공한다.
5.5 Taccel과의 관계
최근 NeurIPS 2025에서 발표된 Taccel은 FEM 기반 고정밀 시뮬레이션을 GPU로 가속하는 방향으로 접근한다. Allegro Hand에 4개의 VBTS를 장착한 정밀 파지 실험에서 깊이 맵 기반의 고해상도 촉각 피드백을 시연했다. FEM의 정확도를 포기하지 않으면서 병렬화를 달성하는 것이 목표다.
Taccel이 “FEM의 정확도를 유지하면서 속도를 높이자”라는 방향이라면, Tacmap은 “FEM 없이도 sim-to-real에 충분한 정확도를 얻을 수 있는 표현을 찾자”라는 방향이다. 두 접근은 상호 보완적이다.
6. 비판적 고찰: 강점과 한계
6.1 강점
1) 우아한 문제 재정의
기존 연구들이 “어떻게 하면 시뮬레이션이 실제처럼 보이게 할 것인가”를 물었다면, Tacmap은 “두 도메인이 동의할 수 있는 표현은 무엇인가”를 물었다. 이 발상의 전환은 광학 렌더링의 복잡성을 통째로 우회한다. 이것이 이 논문의 가장 큰 기여다.
2) 기하학적 범용성(Geometry-Agnostic)
법선 투영 공간을 사용함으로써 평면/곡면 센서를 단일 프레임워크로 처리한다. 이는 손가락 끝 형태의 VBTS가 점점 보편화되는 시대에 중요한 장점이다. 기존 TACTO 기반 시뮬레이터들이 곡면 센서 지원에 어려움을 겪었던 점을 생각하면 의미 있는 진전이다.
3) Isaac Lab + MuJoCo 동시 지원
두 주요 시뮬레이터 모두 지원함으로써 기존 RL 인프라에 쉽게 통합할 수 있다. 연구 커뮤니티 접근성 측면에서 높은 점수를 받는 부분이다.
4) 자동화된 데이터 수집
변환 모델 학습에 필요한 실제 데이터를 자동화 장치로 수집함으로써 수동 레이블링의 부담을 없앤다. 이는 실용적 확장성(practical scalability)의 핵심이다.
5) 검증 방법의 다양성
정량적 변형 맵 비교, 다운스트림 태스크(ball rotation) zero-shot 전이, 그리고 실제 데이터의 시뮬레이션 내 리플레이라는 세 가지 다른 각도에서 검증했다.
6.2 한계와 미해결 질문
1) 전단력(Shear Force) 모델링의 부재
침투 깊이 기반 접근은 본질적으로 법선 방향(normal direction)의 변형을 포착한다. 실제 접촉에서 매우 중요한 전단력에 의한 측면 변형(lateral deformation)—GelSight의 마커 이동 패턴—은 이 프레임워크에서 명시적으로 다루어지지 않는다. 미끄럼 감지(slip detection)나 전단력 기반 정밀 조작에서 이것이 병목이 될 수 있다.
2) 변환 모델의 일반화 범위
학습된 변환 모델 f_\theta가 훈련 분포를 크게 벗어난 접촉 시나리오(예: 훈련 시 사용하지 않은 재질의 물체, 극단적인 접촉 깊이)에서 얼마나 잘 일반화되는지 명확하지 않다. Taxim이 겪었던 것과 유사한 분포 외 일반화 문제를 공유할 가능성이 있다.
3) 검증 태스크의 범위
Zero-shot transfer 실험이 구 회전(ball rotation) 하나의 태스크에 한정된다. 이것은 상징적인 태스크이지만, 나사 삽입(peg insertion), 물체 집기(object grasping), 물체 자세 안정화 등 더 다양한 contact-rich 태스크에서의 검증이 필요하다. 일반화 주장을 강화하려면 태스크 다양성이 필요하다.
4) 렌더링 속도의 정량적 보고 부재
TacSL이 200× CPU 대비 속도 향상을 명시적으로 보고한 것과 달리, Tacmap은 렌더링 속도(FPS)를 정량적으로 제시하지 않는다. “대규모 병렬 RL 훈련을 지원한다”는 주장이 있지만, 구체적인 수치가 없어 다른 방법과의 직접 비교가 어렵다.
5) 변환 모델 아키텍처 및 훈련 세부 사항
변환 모델 f_\theta의 구체적인 아키텍처(CNN? UNet? Transformer?), 훈련 손실 함수, 학습 데이터 크기 등이 명확히 기술되어 있지 않다. 재현 가능성(reproducibility) 측면에서 아쉬운 부분이다.
6) 단일 센서 플랫폼
실험에 사용된 SharpaWave DTC 센서가 다소 생소한 플랫폼이다. GelSight, DIGIT, TacTip 같은 널리 사용되는 센서에서의 검증이 추가된다면 일반화 주장이 더 강화될 것이다.
6.3 미래 연구 방향
전단력 확장: 법선 침투 깊이에 더해 접선 방향(tangential direction)의 상대 변위를 추가하면 전단력 정보를 포착할 수 있다. 이는 마커 이동 시뮬레이션과 결합하는 방향으로 발전 가능하다.
변환 모델의 도메인 일반화: 다양한 센서 타입과 물체에서 수집한 데이터로 훈련된 더 강건한 변환 모델은 센서 무관(sensor-agnostic) 프레임워크로 발전할 수 있다.
Allegro Hand 등 표준 연구 플랫폼 적용: Tacmap이 Allegro Hand나 Shadow Hand 같은 연구 커뮤니티에서 널리 사용하는 플랫폼에 적용된다면 영향력이 크게 확대될 것이다.
7. Allegro Hand 연구자를 위한 함의
다지 조작 연구의 핵심 플랫폼으로 Allegro Hand를 사용하는 연구자들에게 Tacmap이 주는 시사점을 정리한다.
긍정적 함의: - 손가락 끝이 평면이 아닌 Allegro Hand V4의 곡면 fingertip에 VBTS(예: DIGIT, GelSight Mini)를 장착할 경우, Tacmap의 법선 투영 공간 접근이 기존 TACTO보다 적합할 수 있다. - Isaac Lab 통합이 이미 구현되어 있어, Allegro Hand + Isaac Lab RL 파이프라인에 통합하기 용이하다. - 변형 맵이라는 센서 무관 표현은 여러 손가락에 서로 다른 VBTS를 장착하는 경우에도 일관된 관측 공간을 구성하는 데 유리하다.
주의 사항: - 변환 모델 학습을 위한 자동화된 데이터 수집 장치 구축이 추가적인 엔지니어링 부담을 수반한다. - 전단력 정보 없이 순수 법선 변형 맵만으로 고난이도 정밀 조작(나사 조임, 카드 넘기기 등)이 가능한지는 별도 검증이 필요하다.
8. 요약 및 결론
Tacmap은 촉각 sim-to-real 문제를 바라보는 관점을 바꾸는 논문이다.
기존 연구들이 “시뮬레이션을 더 실제처럼 보이게 만들자”는 방향으로 접근했다면, Tacmap은 “두 도메인이 자연스럽게 동의하는 공간을 찾자”는 더 근본적인 질문을 던진다. 그 답으로 제안된 침투 깊이 기반의 변형 맵(deform map)은 FEM 없이도 물리적으로 의미 있는 접촉 표현을 제공하며, 자동화된 데이터 수집과 학습된 변환 모델을 통해 실제 도메인과의 정렬을 달성한다.
특히 곡면 센서를 네이티브로 지원하는 일반화된 법선 투영 공간, Isaac Lab과 MuJoCo 모두에 통합된 GPU 가속 파이프라인, 그리고 구 회전 태스크에서의 zero-shot 전이 실증은 실용적 기여로서 가치가 높다.
물론 전단력 모델링의 부재, 제한된 태스크 다양성, 렌더링 속도의 정량적 미기술 등 보완이 필요한 부분도 있다. 그러나 이 논문이 제안하는 공유 기하 공간을 통한 도메인 정렬(domain alignment via shared geometric space)이라는 원칙은, 단지 촉각 센서에 국한되지 않고 더 넓은 sim-to-real 문제에 적용 가능한 보편적 아이디어로 발전할 잠재력을 가지고 있다.
촉각 감지를 연구하는 로봇공학자에게, 그리고 sim-to-real 간극을 좁히려는 모든 연구자에게 일독을 권한다.
참고 자료 및 관련 논문
| 논문 | 역할 |
|---|---|
| GelSight (Yuan et al.) | 대표적 VBTS 하드웨어 기반 |
| DIGIT (Lambeta et al.) | 소형 VBTS 하드웨어 |
| TACTO (Wang et al.) | 해석적 촉각 시뮬레이터 비교 대상 |
| Taxim (Si & Yuan) | 경험적 시뮬레이터 비교 대상 |
| TacSL (Akinola et al.) | GPU 가속 시뮬레이터 비교 대상 |
| Taccel (Li et al., NeurIPS 2025) | FEM 기반 GPU 병렬화 접근 |
| TacEx (Nguyen et al., CoRL 2024) | Isaac Sim 기반 soft-body + visuotactile 통합 |
| SaTA (2025) | 공간적으로 앵커된 촉각 인식 프레임워크 |