graph TD
A["Isaac Lab / RL Training Loop"] -->|"actions (PyTorch/JAX tensor)"| B["Newton Physics Engine"]
B --> C["Asset Import\n(URDF / MJCF / USD)"]
B --> D["Collision Detection"]
B --> E["Kamino Solver Backend"]
E --> F["Maximal Coordinate\nFormulation\n(6D pose per body)"]
F --> G["Constraint Jacobian J\n(bilateral + unilateral + contact)"]
G --> H["Delassus Matrix\nG = J M-1 J^T"]
H --> I{"Problem Size?"}
I -->|"Small (few contacts)"| J["Block-Cholesky\n(batched dense LLT)"]
I -->|"Large (many contacts)"| K["Warm-Started\nConjugate Residual\n(matrix-free)"]
J --> L["Proximal-ADMM\nIterative Solver"]
K --> L
L --> M["CUDA Graph Capture\n(wp.capture_while)"]
M --> N["Per-World Early Exit\nMask"]
N -->|"converged"| O["Forward Dynamics\nOutput: accelerations"]
N -->|"not converged"| L
O -->|"observations (zero-copy)"| A
style E fill:#1a1a2e,color:#eee
style L fill:#16213e,color:#eee
style M fill:#0f3460,color:#eee
📃Kamino 리뷰
proximal-admm
rl
simulation
GPU-based Massively Parallel Simulation of Multi-Body Systems with Challenging Topologies
- 🚀 Kamino는 NVIDIA Warp를 사용하여 구현된 GPU 기반 물리 시뮬레이션 솔버로, 복잡한 kinematic loop를 포함한 이종의 다중 바디 시스템을 병렬로 시뮬레이션하여 Reinforcement Learning(강화 학습)을 가능하게 합니다.
- ⚙️ 이 솔버는 Maximal-Coordinate Formulation과 Proximal-ADMM을 통해 관절 제약 조건, 관절 한계, 마찰 접촉을 통합적으로 처리하며, heterogeneous world를 지원하여 구조적으로 다양한 로봇의 대규모 병렬 시뮬레이션을 가능하게 합니다.
- 📈 Kamino는 DR Legs와 같은 복잡한 로봇에 대한 RL 정책 학습을 단일 GPU에서 수천 개의 병렬 환경으로 시뮬레이션하여 성공적으로 시연했으며, 특히 접촉 제약 조건이 있는 시스템에서 높은 충실도와 처리량을 제공합니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
Kamino는 이종의 고도로 결합된 기계 시스템의 대규모 병렬 시뮬레이션을 위한 GPU 기반 물리 솔버입니다. NVIDIA Warp를 사용하여 Python으로 구현되었고 Newton 프레임워크에 통합되어 있으며, 운동학적 루프와 같이 강력하게 결합된 운동학적 및 동적 제약을 보이는 복잡한 로봇 시스템에 데이터 기반 방법(예: 대규모 Reinforcement Learning)을 적용할 수 있도록 합니다. 기존에는 시스템 토폴로지를 운동학적 트리로 근사하고 명시적인 루프-폐쇄 제약 조건 또는 소위 ’mimic joints’를 통합하여 운동학적 루프를 회피하는 경향이 있었으나, Kamino는 이러한 유형의 결합을 기본적으로 지원하여 이 부담을 경감합니다. 이를 통해 폐쇄형 운동학적 체인을 활용하는 기계 시스템의 실제 특성을 포착하는 고처리량 병렬 시뮬레이션이 가능합니다. 또한, Kamino는 이종 세계(heterogeneous worlds)를 지원하여 단일 GPU에서 구조적으로 다양한 로봇의 배치 시뮬레이션을 허용합니다.
Kamino의 핵심은 제약된 강체 다물체 전방 동역학을 비선형 상보성 문제(Nonlinear Complementarity Problem, NCP)로 전사하여 제약 힘(constraint forces)을 계산하는 최신 제약 최적화 알고리즘입니다. 이는 문제를 단순화하거나 볼록화하는 근사 모델에 의존하지 않고 접촉 동역학을 해결할 수 있는 고정밀 시뮬레이션으로 이어집니다.
핵심 방법론 (Core Methodology)
Kamino는 Maximal-coordinate formulation [12]을 채택하여 각 강체 i가 독립적인 \text{SE}(3) 자세 q_i = (r_i, q_i) \in \mathbb{R}^3 \times \text{S}^3와 6D 공간 트위스트 u_i = (v_i, \omega_i) \in \mathbb{R}^6를 가집니다. 시스템 질량 행렬은 블록-대각(block-diagonal) 형태를 가집니다: M = \text{diag}(M_1, \dots, M_{nb}), \quad M_i = \begin{pmatrix} m_i I_3 & 0 \\ 0 & R_i I_i^b R_i^\top \end{pmatrix} 여기서 m_i는 질량, I_i^b는 강체-좌표계(body-frame) 관성 텐서, R_i는 쿼터니언 q_i에서 추출된 회전입니다. 운동 방정식은 Newton-Euler formulation을 따릅니다: M\dot{u} = h(q, u) + J(q)^\top \lambda, 여기서 h는 중력, 자이로스코픽 및 순수 외부 힘, J는 제약 Jacobian, \lambda는 제약 반응 벡터입니다.
세 가지 범주의 제약 조건이 단일 시스템으로 통합됩니다:
- 양방향(Bi-lateral) 및 단방향(Unilateral) 조인트 제약 조건: f(q) = 0 형태로, 운동학적 관계를 강제합니다. Maximal-coordinate formulation의 핵심 장점은 루프-폐쇄 제약 조건이 일반적인 조인트 제약 조건과 구조적으로 동일하게 처리되어 특별한 처리가 필요 없다는 점입니다.
- 단방향 조인트 한계: 조인트 좌표에 대한 부등식 한계를 0 \le \lambda \perp g(q) \ge 0 형태로 강제합니다.
- 접촉(Contacts): De Saxc´e correction [20, 21]을 사용하여 Signorini-Coulomb-Newton 상보성으로 모델링되며, 비관련 Coulomb 마찰 법칙을 Coulomb cone K = \bigoplus_k K_{\mu_k}의 카테시안 곱에 대한 상보성 조건으로 재구성합니다.
시스템은 semi-implicit Euler integration [23]을 사용하여 시간적으로 진행됩니다. 제약 반응은 암시적으로 해결되고, 자세는 \text{SO}(3)에 대한 exponential map을 통해 명시적으로 통합됩니다. Moreau-Jean midpoint scheme [24]도 지원됩니다.
운동 방정식과 시간-단계(time-stepping) 스키마는 다음과 같은 KKT 시스템을 도출합니다: \begin{pmatrix} M & J^\top \\ J & -R \end{pmatrix} \begin{pmatrix} \dot{u} \\ -\lambda \end{pmatrix} = \begin{pmatrix} \Delta t h + M u \\ -v^* \end{pmatrix} 여기서 v^*는 Baumgarte stabilization, impact biases 및 PD 제어에서 발생하는 항을 모아놓은 것이며, R은 armature, 점성 감쇠, 암시적 PD 제어와 같은 조인트 공간 동역학 제약 조건에서 파생된 정규화 항을 포함합니다.
속도 변수를 Schur complement를 통해 제거하면, 전방 동역학 문제는 제약 반응 \lambda에 대한 이중 문제(dual problem)로 축소됩니다 [11]: \lambda^* = \arg\min_{x \in K} \frac{1}{2} x^\top D x + x^\top v_f + \Gamma(v^+(x)) 여기서 D = J M^{-1} J^\top + R은 Delassus matrix(즉, 제약 공간 역 겉보기 관성 행렬)이고, v_f = J u^- + \Delta t M^{-1} h + v^*는 자유 속도 벡터입니다. \Gamma(\cdot)은 De Saxc´e correction operator로 목적 함수를 비선형으로 만듭니다.
이 비평활(non-smooth), 원뿔-제약(cone-constrained) 최적화 문제는 Proximal-ADMM (PADMM) [11, 17, 15]을 통해 해결됩니다. PADMM은 실행 가능한 원뿔 K에 제약된 합의 변수(consensus variable) y와 스케일된 이중 변수(dual variable) z, 그리고 proximal regularization 매개변수 \eta와 증강-Lagrangian 페널티 \rho를 도입합니다. 각 반복 단계는 다음과 같습니다:
- D_{\eta, \rho} = D + (\eta + \rho)I를 빌드합니다.
- x^i를 계산하기 위해 선형 시스템을 해결합니다: x^i \leftarrow -D_{\eta, \rho}^{-1} (v_f + s^i - \eta x^{i-1} - \rho y^{i-1} - z^{i-1}), 여기서 s^i = \Gamma(z^{i-1})입니다.
- y^i \leftarrow \Pi_K(x^i - \rho^{-1} z^{i-1})와 같이 원뿔 투영을 수행합니다.
- z^i \leftarrow z^{i-1} - \rho(x^i - y^i)와 같이 이중 변수를 업데이트합니다.
Nesterov acceleration과 warm-starting 기법이 수렴을 가속화하고, Jacobi preconditioner P = \text{diag}(D)^{-1/2}가 스펙트럼 속성을 개선하는 데 사용됩니다.
GPU 병렬화 및 성능 최적화
Kamino는 수천 개의 독립된 환경을 동시에 시뮬레이션해야 하는 RL 워크플로우에 최적화되어 있습니다.
- 선형 시스템 해결:
- 사용자는 Jacobian 행렬 J를 Dense 또는 Block-Sparse-Row (BSR) 형식으로 선택할 수 있습니다. BSR 형식은 메모리 할당 및 연산 수를 크게 절감합니다.
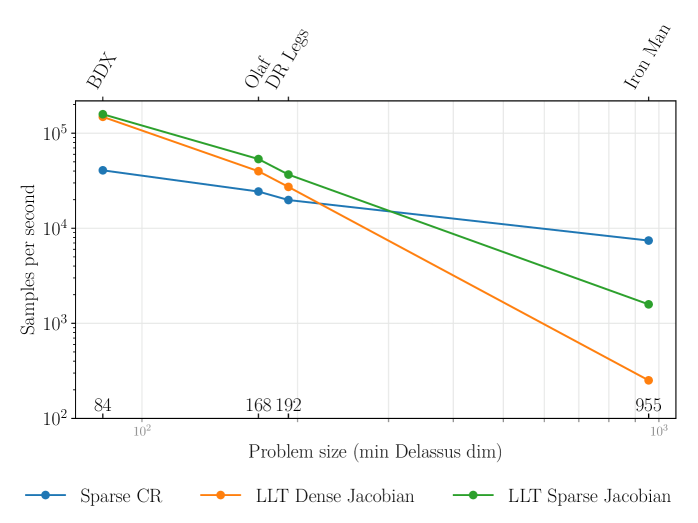
- 동역학 문제 표현은 Dense (D 행렬을 명시적으로 조립하고 LLT factorization) 또는 Sparse (행렬-자유(matrix-free) Delassus 연산자를 Conjugate Residual (CR) iterative solver [13]와 함께 사용)로 선택할 수 있습니다. 작은 시스템에는 Dense LLT가 효율적이지만, 큰 시스템에서는 Sparse CR이 메모리 및 계산 비용 측면에서 유리합니다. Sparse CR은 Dv 연산을 J, M^{-1}, J^\top와의 희소 행렬-벡터 곱을 연결하여 수행하며, 비제로 블록에 걸쳐 병렬화됩니다.
- GPU 최적화로는 ‘Pre-baked Jacobians’ (대각선 preconditioner와 M^{-1}를 Jacobian 사본에 통합하여 메모리-바운드 연산 감소) 및 ‘Low iteration budget’ (ADMM 수렴 시 이전 반복의 해로 CR 솔버를 warm-start하여 적은 반복으로도 충분한 수렴 달성)이 있습니다.
- 이종 환경 (Heterogeneous Environments):
- 기존 시뮬레이터와 달리, Kamino는 모든 세계가 동일한 수의 시뮬레이션 엔티티(예: 강체, 조인트)를 공유해야 한다는 제약을 해제합니다.
- 모든 GPU 커널은 (num worlds, max dim) 형태의 2D 스레드 그리드에서 작동하며, ’max dim’은 모든 세계에서 관련 수량(강체, 제약, 접촉 등)의 최대값입니다. 각 세계는 실제 차원을 저장하며, 스레드는 해당 세계의 카운트를 초과하면 조기에 종료됩니다.
- Struct-of-Arrays (SoA) 레이아웃은 GPU 메모리 접근의 coalesced 액세스를 보장합니다.
- PADMM 솔버 루프 전체는 Warp의
wp.capture_while을 사용하여 CUDA 그래프로 캡처되어 커널 실행 오버헤드를 제거합니다. 이는 배열 모양이 그래프 캡처 시점에 고정되어 있고 Delassus operator가 시간 단계 내에서 일정하기 때문에 가능합니다. 또한, PADMM이 이미 수렴한 세계는 조기 종료할 수 있는 세계별 마스크가 있습니다.

결론
Kamino는 DR Legs와 같은 복잡한 로봇의 RL 정책 훈련을 성공적으로 시연하며, 단일 GPU에서 수천 개의 병렬 환경을 시뮬레이션할 수 있는 능력을 보여주었습니다. Maximal-coordinate formulation을 사용함으로써 발생하는 처리량 오버헤드는 GPU의 SIMT 병렬 처리를 최대한 활용하는 대규모 병렬 시뮬레이션 능력으로 효과적으로 완화됩니다. 이종 세계 처리는 다양한 로봇 형태에 대한 배치 시뮬레이션을 가능하게 하여, 메커니즘 설계 매개변수 최적화를 위한 샘플링 기반 기술 적용의 가능성을 열어줍니다. 현재 Kamino는 강체 다물체 시스템에 중점을 두고 있으며, 입자 및 연체 지원, 엔드-투-엔드 솔버 미분 가능성, 프라이멀 및 KKT 시스템 지원 등은 향후 연구 과제입니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론: 왜 지금 이 문제인가?
강화학습(RL)으로 로봇 제어 정책을 학습하려면, 수천 개의 시뮬레이션 환경을 동시에 돌릴 수 있어야 한다. Isaac Gym이 2021년 등장하면서 GPU 기반 대규모 병렬 시뮬레이션이 일반화되었고, 이제 단일 GPU에서 4096개의 환경을 돌리며 실제 로봇 걷기를 학습시키는 건 더 이상 놀라운 일이 아니다.
그런데 여기에 조용히 방치되어 온 문제가 하나 있다.
현실의 로봇은 트리 구조가 아니다.
사족보행 로봇의 다리, 이족보행 로봇의 무릎, 디즈니 파크의 퍼포먼스 로봇, 정밀 병렬 매니퓰레이터 — 이들 상당수는 닫힌 운동학적 루프(closed kinematic loop), 즉 4절 링크(four-bar linkage)나 병렬 기구를 내부에 담고 있다. 이런 구조는 직렬 체인보다 훨씬 효율적으로 힘을 전달하고 강성을 높인다. 기계공학적으로는 탁월한 설계다.
그런데 시뮬레이터 입장에서는 악몽이다.
기존 GPU 시뮬레이터들(Isaac Gym, Brax, MuJoCo MJX)은 대부분 감소 좌표계(reduced-coordinate) 기반의 관절형 바디 알고리즘(Articulated Body Algorithm, ABA)을 쓴다. 이 방식은 운동학적 트리를 전제로 설계되어 있어서, 루프 클로저가 생기면 구조 자체가 깨진다. 실무자들은 어쩔 수 없이 루프를 “끊고” 등가적인 트리로 근사하거나, mimic joint나 별도 penalty 제약으로 흉내를 낸다. 이는 sim-to-real gap을 키우고, 정확한 동역학을 포기하는 타협이다.
Kamino는 이 타협을 거부한다.
Disney Research와 NVIDIA Zurich의 공동 연구팀이 발표한 이 논문은, 임의의 조인트 토폴로지를 가진 강체 다체계를 GPU에서 수천 개 동시에 정확하게 시뮬레이션하는 솔버를 제시한다. 핵심은 두 가지다: 최대 좌표계(maximal-coordinate) 정식화와 Proximal-ADMM 기반 쌍대 솔버. 그리고 이것을 NVIDIA Warp 위에서 순수 Python GPU 커널로 구현해, Newton 물리 엔진에 통합했다.
배경: 두 세계의 충돌
감소 좌표계 vs. 최대 좌표계
물리 시뮬레이션에서 강체 다체계를 표현하는 방법은 크게 두 가지다.
감소 좌표계(Reduced Coordinates)는 각 조인트의 자유도(DOF)만을 상태 변수로 쓴다. 예를 들어 7축 매니퓰레이터는 7개의 관절각만으로 전체 상태를 표현한다. 제약조건이 이미 좌표 선택에 내재되어 있어 자동으로 만족된다. Featherstone의 Articulated Body Algorithm이 이 위에서 동작하며, 트리 구조 로봇에서 O(n)의 선형 복잡도를 달성한다. Isaac Gym, MuJoCo, Brax가 모두 이 방식이다.
문제는 루프 클로저다. 루프가 생기는 순간, 트리 구조라는 전제가 깨지고 ABA의 재귀적 분해가 작동하지 않는다. 일부 시뮬레이터가 제한적인 루프 클로저 제약을 제공하지만, 이는 별도의 특수 처리이며 GPU 병렬화와 잘 맞지 않는다.
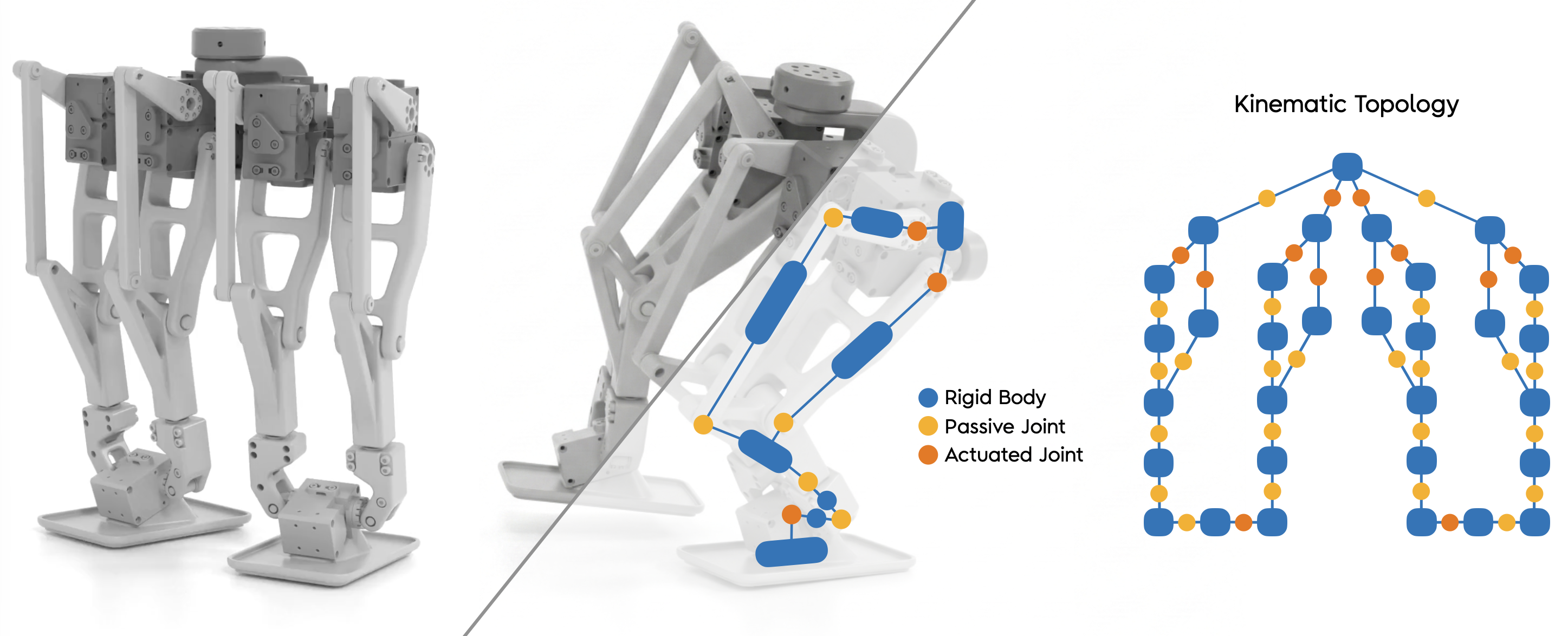
최대 좌표계(Maximal Coordinates)는 모든 강체에 독립적인 6D 포즈(위치+자세)를 부여한다. 조인트 제약은 명시적인 대수 방정식으로 표현된다. n개의 바디가 있으면 6n개의 상태 변수가 생기고, 제약을 만족시키는 것은 솔버의 몫이 된다. 이 방식은 더 많은 변수를 다루지만, 임의의 토폴로지를 자연스럽게 처리한다. 루프든 트리든, 수식의 형태가 바뀌지 않는다.
루프가 왜 어려운가: Delassus 행렬
최대 좌표계에서 순방향 동역학(forward dynamics)을 풀면, 결국 다음과 같은 선형 시스템에 도달한다:
\mathbf{G} \boldsymbol{\lambda} = \mathbf{g}
여기서 \boldsymbol{\lambda}는 제약 반력(constraint reaction force) 벡터, \mathbf{g}는 자유 운동 속도, 그리고:
\mathbf{G} = \mathbf{J} \mathbf{M}^{-1} \mathbf{J}^\top
이 \mathbf{G}가 바로 Delassus 행렬이다. \mathbf{J}는 제약 자코비안, \mathbf{M}은 질량 행렬이다.
트리 구조에서는 \mathbf{G}의 스파스 구조를 활용해 효율적으로 풀 수 있다. 그런데 루프 클로저가 생기면, 루프에 속한 모든 바디들이 전역적으로 결합(globally coupled)되면서 \mathbf{G}의 스파스 구조가 깨지고 밀집 블록이 생긴다. 이 밀집 선형 시스템을 GPU에서 수천 개 동시에 효율적으로 푸는 것이 Kamino의 핵심 기술적 과제다.
방법: Kamino의 설계 철학
1. 최대 좌표계 + Proximal-ADMM (PADMM)
Kamino는 순방향 동역학 문제를 제약 반력의 쌍대 공간(dual space)에서 푼다. 구체적으로, Proximal ADMM(PADMM)을 사용해 다음 세 유형의 제약을 통합적으로 다룬다:
| 제약 유형 | 예시 | 처리 방식 |
|---|---|---|
| 쌍방향 조인트 제약 (bilateral) | 회전 조인트, 루프 클로저 | 등호 제약 → 하드 대수 제약 |
| 단방향 관절 한계 (unilateral) | 관절 범위 한계 | 부등호 제약 → 근위 연산자(proximal operator) |
| 마찰 접촉 (frictional contact) | 발이 지면에 닿을 때 | 마찰 콘(cone) 투영 |
이 세 가지가 하나의 PADMM 루프 안에 자연스럽게 통합된다는 점이 우아하다. 각각 별도의 솔버를 쓸 필요가 없다.
PADMM의 한 iteration을 의사코드로 표현하면:
Algorithm: Proximal-ADMM (PADMM) for Constrained Forward Dynamics
Input: Mass matrix M, Jacobian J, free velocities v_free,
penalty parameter rho, max_iterations K
Initialize: lambda = 0, z = 0, u = 0 (primal, auxiliary, dual variables)
For k = 1, ..., K:
// Step 1: Solve linear system (most expensive step)
G_rho = G + rho * I // augmented Delassus matrix
lambda = solve(G_rho, -(g + rho*(z - u)))
// Step 2: Proximal/projection step (cheap)
z = prox_C(lambda + u) // project onto constraint set C
// Step 3: Dual variable update (cheap)
u = u + lambda - z
// Early exit check per world
if converged(lambda, z): break
Output: lambda (constraint reactions)
Post: Compute accelerations via M * a = tau - J^T * lambda여기서 prox_C는 제약 유형에 따라: - 쌍방향 제약: 항등 연산 (이미 등호 제약이므로 투영 불필요) - 관절 한계: 클램핑(clamping) 연산 - 마찰 접촉: 마찰 콘으로의 투영 (Coulomb cone projection)
Step 1이 가장 비싼 연산이다. \mathbf{G}_\rho = \mathbf{G} + \rho \mathbf{I}를 푸는 선형 시스템이 전체 계산의 병목이고, Kamino의 GPU 병렬화 설계가 여기에 집중된다.
2. 두 가지 선형 시스템 솔버 전략
Kamino는 문제 크기에 따라 두 가지 선형 솔버 옵션을 제공한다:
전략 A: Block-Cholesky (밀집 LLT 분해)
\mathbf{G}_\rho가 상대적으로 작을 때(접촉이 적은 상황 등) 사용한다. \mathbf{G}_\rho를 명시적으로 형성하고 Cholesky 분해를 수행한다. GPU에서 배치 행렬 분해(batched LLT)로 구현되어, 각 world의 독립적인 \mathbf{G}_\rho를 병렬로 분해한다.
전략 B: Warm-Started Conjugate Residual (CR, 희소 행렬-자유 연산)
\mathbf{G}_\rho가 클 때 사용한다. 행렬을 명시적으로 저장하지 않고, matrix-free 방식으로 Delassus 연산자를 적용한다. 즉 \mathbf{G}_\rho \mathbf{v} = (\mathbf{J} \mathbf{M}^{-1} \mathbf{J}^\top + \rho \mathbf{I})\mathbf{v}를 매번 계산한다. 이전 timestep의 해를 초기 추정값으로 사용하는 warm-starting이 수렴을 크게 가속한다.
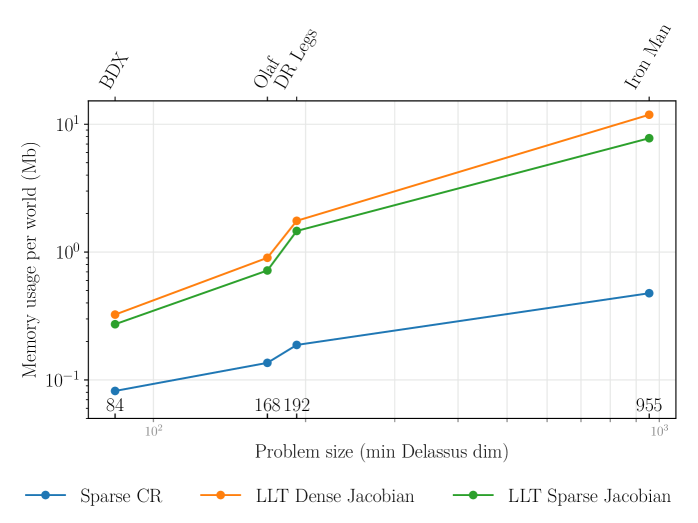
\text{Memory: Block-Cholesky} \propto O(m^2 \cdot N_\text{worlds}), \quad \text{CR} \propto O(n \cdot N_\text{worlds})
여기서 m은 Delassus 행렬의 차원(활성 제약 수), n은 바디 수다. 접촉이 많아지면 CR 방식이 메모리 효율에서 압도적으로 유리하다.
3. GPU 병렬화: 이종(heterogeneous) 세계 지원
RL 학습에서 GPU 시뮬레이션의 진짜 어려움은 배치 처리다. 수천 개의 world를 동시에 돌릴 때, 각 world의 접촉 상태가 달라서 활성 제약의 수 m이 world마다 다를 수 있다. 이를 이종 시스템(heterogeneous system)이라 부른다.
Kamino는 두 가지 차원의 이종성을 모두 지원한다:
차원 1: 동일 로봇, 다른 제약 상태
같은 로봇이라도 world마다 발의 접촉 패턴이 달라 제약 수 m이 다르다. Kamino는 가장 큰 m에 맞춰 패딩(padding)하거나, per-world 마스크로 수렴한 world는 조기 종료(early exit)한다.
차원 2: 아예 다른 로봇 구조
Kamino의 특히 주목할 만한 기능은, 각 parallel world에 구조적으로 완전히 다른 로봇을 넣을 수 있다는 점이다. 바디 수, 조인트 수, 충돌 지오메트리가 모두 다른 로봇들을 동시에 시뮬레이션할 수 있다. 이는 다양한 형태의 로봇을 탐색하는 하드웨어 설계 최적화나, 다양한 환경 설정에서의 도메인 랜덤화(domain randomization)에 매우 강력한 기반이 된다.
4. CUDA Graph Capture로 반복 루프 가속
PADMM은 내부적으로 수렴할 때까지 반복하는 루프다. Warp의 wp.capture_while을 사용해 이 반복 루프 전체를 단일 CUDA Graph로 컴파일한다. 그래프는 배열 크기가 고정된 시점에 캡처되며, 한 timestep 안에서 Delassus 연산자는 불변이므로 캡처 후 반복 재사용이 가능하다. Per-world 수렴 마스크가 조기 종료를 처리한다.
이렇게 하면 Python→CUDA 사이의 kernel launch overhead가 수렴 반복 횟수만큼 곱해지지 않고, 그래프 실행 한 번으로 압축된다. 긴 학습 실행에서 이 초기 그래프 컴파일 비용이 상각(amortize)된다.
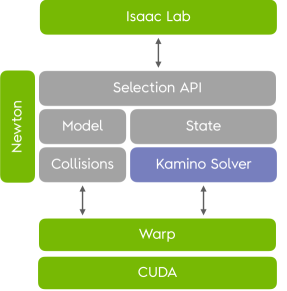
5. Newton 프레임워크 통합과 Isaac Lab 계획
Kamino는 독립 실행 시뮬레이터가 아니라, NVIDIA Newton 오픈소스 물리 엔진의 솔버 백엔드로 구현된다. Newton은 공통 인터페이스를 통해 여러 솔버 백엔드를 지원하며, Kamino는 그 중 하나다. Newton이 제공하는 자산 임포트(URDF, MJCF, USD), 충돌 감지, 시각화 위에 Kamino가 동역학 솔버로 올라탄다.
또한 NVIDIA Isaac Lab과의 통합이 계획되어 있어, Isaac Lab의 RL 환경 래퍼, 태스크 정의, 훈련 파이프라인을 그대로 활용할 수 있게 될 예정이다. PyTorch 및 JAX와 제로 카피(zero-copy) 텐서 상호운용성이 이미 Warp에서 지원되므로, 시뮬레이션 결과를 RL 훈련 루프에 바로 공급할 수 있다.
시스템 아키텍처 다이어그램
실험: 무엇을 검증했는가?
평가 대상 로봇 시스템
논문은 네 개의 로봇 시스템을 대상으로 Kamino를 평가한다. 복잡도 순서로:
| 로봇 | 바디 수 | 조인트 수 | 루프 수 | 토폴로지 |
|---|---|---|---|---|
| Cartpole | 2 | 1 | 0 | Open tree |
| BDX | 중간 | - | 0 | Open tree (이족보행) |
| Olaf | 중간 | - | 낮음 | Closed-chain |
| DR Legs | 높음 | 36 (12 구동, 24 수동) | 6 | Serial-parallel hybrid |
DR Legs가 핵심 테스트케이스다. Disney Research의 이족보행 로봇으로, 각 다리가 여러 개의 4절 링크(four-bar linkage)를 포함하는 복잡한 병렬-직렬 혼합 구조다. 4개의 반-다리(half-leg) 각각에 9개의 회전 조인트(12개 구동, 24개 수동)가 있고 독립적인 루프가 6개 존재한다. 이런 로봇을 근사 없이 시뮬레이션하는 것은 기존 GPU 시뮬레이터로는 불가능했다.
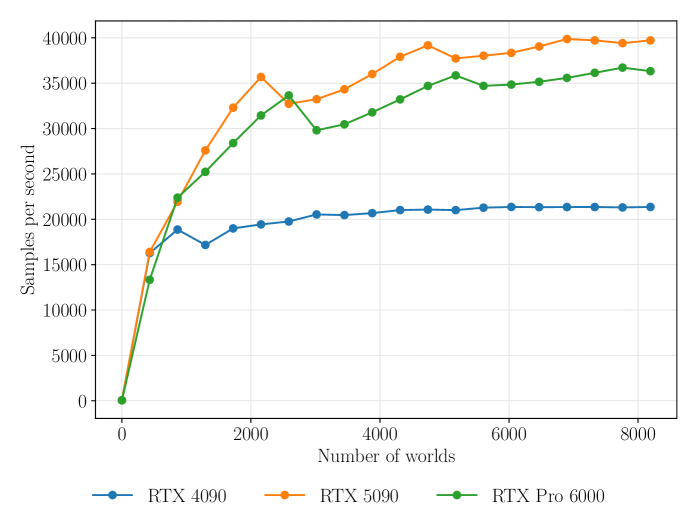
처리량(Throughput) 및 확장성
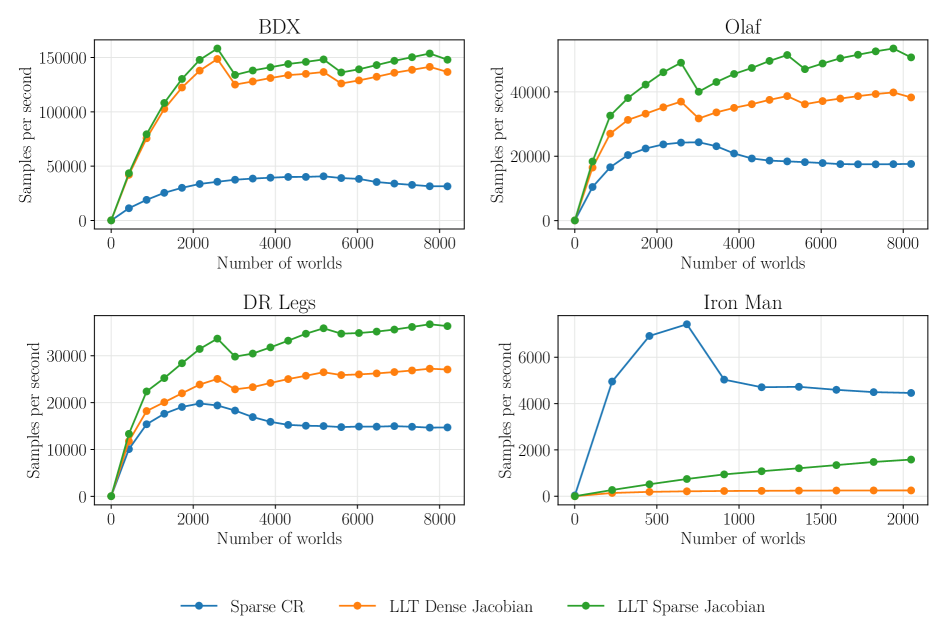
Kamino는 다음 세 솔버 설정의 성능을 비교한다:
- Sparse CR: 희소 켤레 잔차 솔버 (대형 시스템용)
- Dense LLT (Dense J): 밀집 Cholesky + 밀집 자코비안
- Dense LLT (Sparse J): 밀집 Cholesky + 희소 자코비안
병렬 world 수를 늘릴수록 처리량이 선형에 가깝게 스케일하며, DR Legs의 경우 단일 GPU에서 4096개 병렬 환경 운용이 시연되었다.
한편 BDX처럼 루프가 없는 순수 관절형 로봇에서는 Kamino가 Newton 내의 reduced-coordinate 솔버보다 낮은 처리량을 보인다. 이는 설계상의 트레이드오프로, 논문이 명확하게 인정하고 있다. 최대 좌표계는 더 많은 변수를 다루므로, 루프가 없는 시스템에서는 ABA 기반 솔버가 항상 더 빠르다.
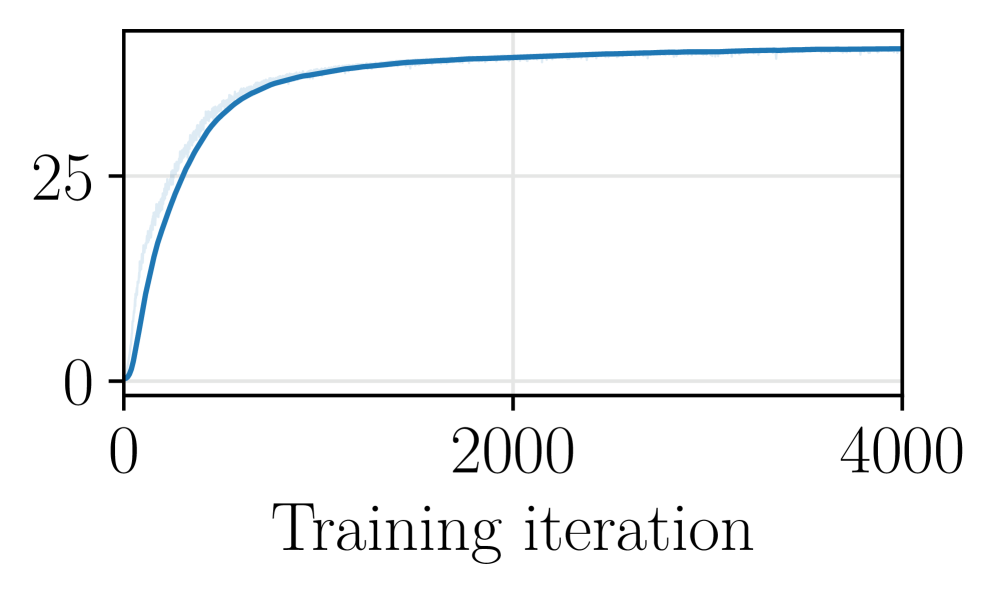
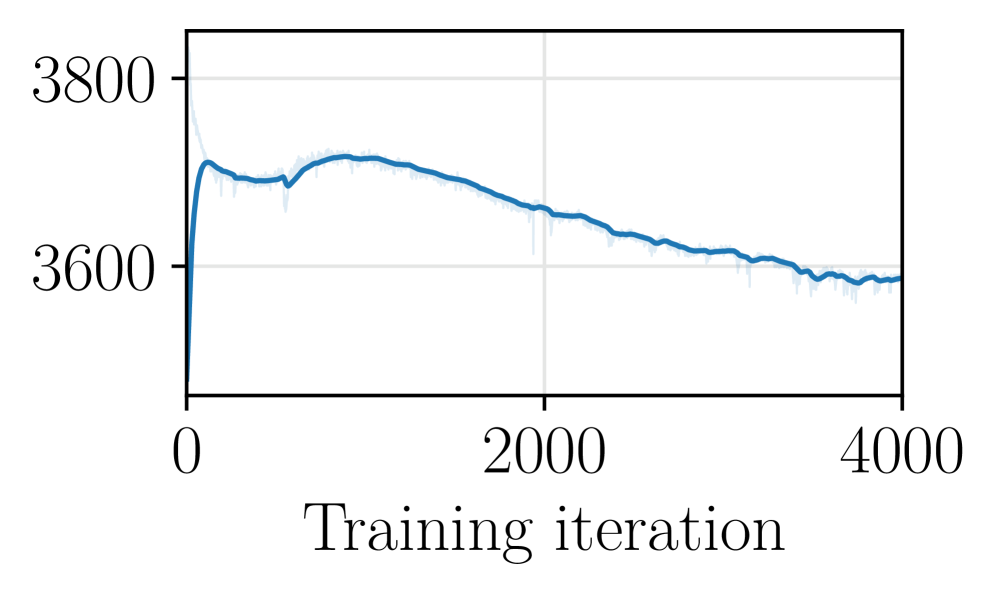
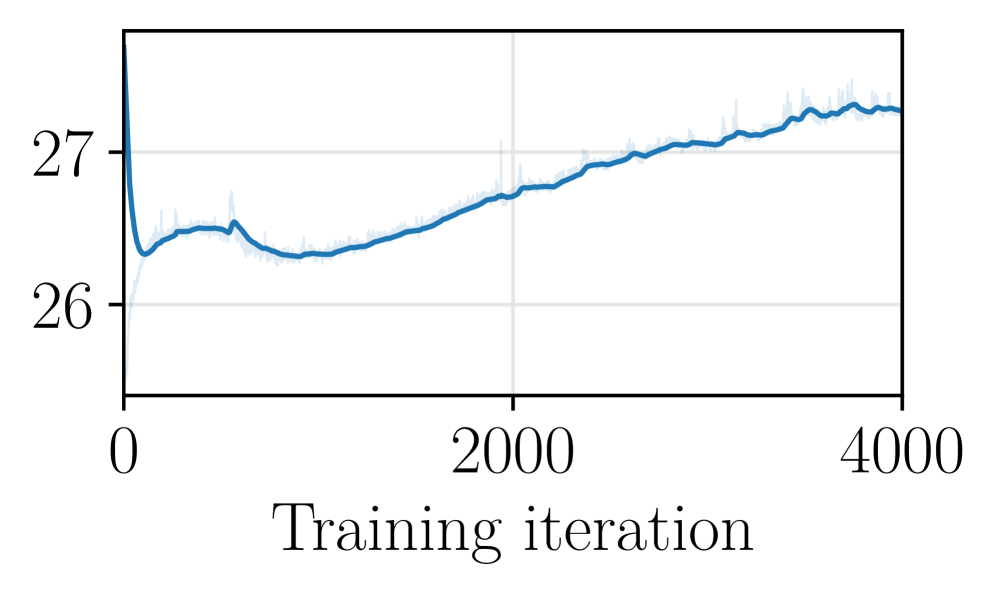
DR Legs RL 정책 학습
가장 인상적인 실험 결과는 DR Legs에 대한 강화학습 보행 정책 학습이다. 이는 복잡한 운동학적 루프를 가진 메커니즘에 대해 GPU 시뮬레이터 안에서 RL 학습을 수행한 첫 번째 사례로 논문에서 명시된다.
4096개의 병렬 환경에서 PPO(Proximal Policy Optimization)로 보행 정책을 학습했으며, Kamino가 RL 루프와의 통합 백엔드로서 실질적으로 동작함을 보였다.
관련 연구와의 비교
GPU 시뮬레이터 생태계에서의 위치
quadrantChart
title GPU Simulators: Topology Generality vs. Throughput
x-axis Low Throughput --> High Throughput
y-axis Open Tree Only --> Arbitrary Topology
quadrant-1 Ideal (unreached)
quadrant-2 Kamino territory
quadrant-3 CPU simulators
quadrant-4 Existing GPU simulators
Isaac Gym: [0.9, 0.15]
Brax: [0.85, 0.1]
MuJoCo MJX: [0.75, 0.2]
MuJoCo CPU: [0.2, 0.3]
Kamino (DR Legs): [0.35, 0.85]
Kamino (simple): [0.5, 0.85]
| 시뮬레이터 | 좌표계 | 루프 지원 | GPU 병렬화 | RL 통합 |
|---|---|---|---|---|
| Isaac Gym / Lab | Reduced | 제한적 | 뛰어남 | 직접 지원 |
| Brax | Reduced | 없음 | 뛰어남 | JAX 기반 |
| MuJoCo MJX | Maximal | 있음 (제한) | 중간 | Python |
| Genesis | Mixed | 제한적 | 뛰어남 | 통합 |
| Kamino | Maximal | 임의 토폴로지 | 뛰어남 | Newton/Isaac Lab |
MuJoCo는 최대 좌표계를 사용하므로 원리적으로 루프 처리가 가능하다. 그러나 GPU 병렬화에서 수천 개 world 스케일을 지원하지 못하고, MJX(JAX 기반 GPU 버전)도 이종 world를 지원하지 않는다.
알고리즘적 선조들
Kamino의 핵심 알고리즘 기반은 별도 논문(arXiv:2504.19771)에 상세히 기술되어 있다. ADMM을 물리 시뮬레이션에 적용하는 접근은 Macklin의 XPBD(Extended Position-Based Dynamics)와 개념적으로 연결되지만, Kamino는 하드 대수 제약(hard algebraic constraints)을 정확하게 만족시키는 데 집중한다는 점에서 다르다. XPBD는 penalty 기반이라 제약을 근사 만족시키는 반면, Kamino는 PADMM의 수렴을 통해 진정한 제약 만족을 달성한다.
Pinocchio + MPC 기반 접근은 CPU에서 루프 클로저를 정확하게 처리하지만, RL 학습에 필요한 대규모 병렬 처리를 제공하지 못한다.
비판적 고찰: 무엇을 얻고 무엇을 잃는가?
강점
1. 진정한 의미의 토폴로지 자유도
4절 링크, 병렬 기구, 다지 로봇의 발 폐루프 - 이런 구조를 근사 없이 시뮬레이션한다는 것은 단순한 편의가 아니라, 시뮬레이션 정확도와 sim-to-real gap 감소에 직접 기여한다. 루프를 mimic joint로 근사하면, 실제 시스템의 강성, 제약력, 동역학 응답이 모두 틀어진다.
2. 이종 world 지원
같은 GPU 배치 안에서 서로 다른 로봇 구조를 동시에 돌릴 수 있다는 것은, 기존 어떤 GPU 시뮬레이터도 제공하지 못한 기능이다. 이는 multi-morphology RL이나 하드웨어 설계 공간 탐색에 새로운 가능성을 연다.
3. 통합적 제약 처리
bilateral 조인트, unilateral 한계, 마찰 접촉이 하나의 PADMM 프레임워크로 통합된다. 이는 코드 복잡도를 줄이고, 각 제약 유형 간의 상호작용을 일관되게 처리한다.
4. 실용적 Python 기반 구현
NVIDIA Warp를 통해 Python으로 GPU 커널을 작성하고, PyTorch/JAX와 제로 카피로 연동된다. 이는 RL 연구자들이 익숙한 생태계에 자연스럽게 통합된다.
약점 및 한계
1. 순수 트리 구조 로봇에서의 성능 열세
루프가 없는 단순 관절형 로봇(예: BDX)에서 Kamino는 reduced-coordinate ABA 솔버보다 낮은 처리량을 보인다. 최대 좌표계의 높은 차원성과 PADMM 반복 비용이 그 이유다. 즉 Kamino는 루프 없는 로봇에는 적합하지 않다.
2. 단일 환경 실시간 시뮬레이션에 부적합
논문 자체가 명시하듯, Kamino는 단일 환경을 실시간으로 돌리는 데는 CPU 시뮬레이터보다 느리다. GPU 병렬화가 빛을 발하려면 수백~수천 개의 world가 동시에 실행되어야 한다.
3. 베타 단계의 성숙도
프로젝트 페이지에 명시적으로 “currently in beta”라고 표시되어 있다. 성능 최적화와 추가 기능 지원이 진행 중이다. 아직 프로덕션 사용에는 주의가 필요하다.
4. 접촉이 많은 시나리오에서의 스케일링
Delassus 행렬의 차원은 활성 제약(active constraint) 수에 따라 동적으로 변한다. 접촉이 많은 환경(예: 복잡한 지형 위 보행, 다지 그리핑)에서는 \mathbf{G}의 크기가 크게 변동하며, 이에 따른 메모리와 연산 비용의 예측 가능성이 떨어진다.
5. PADMM의 수렴 민감성
ADMM 계열 알고리즘은 penalty 파라미터 \rho 선택에 민감하다. 논문이 warm-starting으로 이를 완화하지만, 대규모 질량 비율 차이(ill-conditioning)나 강한 제약 결합에서는 수렴이 느려질 수 있다. 자동 \rho 튜닝 전략이 향후 과제로 남는다.
6. 그래디언트 미분 가능성 미지원
현재 Kamino는 미분 가능한 시뮬레이션을 지원하지 않는다. 즉, model-based RL이나 기울기 기반 정책 최적화(예: Diff-Sim 기반 접근)와 직접 결합하기 어렵다. RL의 경우 환경과의 상호작용만 필요하므로 문제없지만, 더 넓은 학습 방법론 적용을 위해서는 중요한 한계다.
Allegro Hand / Dexterous Manipulation 연구자를 위한 관점
이 논문의 독자 중 많은 분들이 Allegro Hand나 다지 조작 시스템을 연구할 것이다. Kamino가 이 분야에 갖는 함의를 짚어보자.
현재 dexterous manipulation 시뮬레이션의 한계: Allegro Hand V4는 기본적으로 단순한 회전 조인트 트리 구조라 Kamino의 직접적 수혜 대상은 아니다. 그러나 더 복잡한 손 설계, 예를 들어 Shadow Hand의 엄지 기구나 다수의 링크가 결합된 고성능 그리퍼는 closed-loop 구조를 가진다. 이런 시스템을 정확하게 시뮬레이션하는 데 Kamino가 핵심 도구가 될 수 있다.
이종 world의 응용: 다양한 물체 형상이나 손 파라미터를 동시에 탐색하는 대규모 도메인 랜덤화 실험에서, 이종 world 지원이 새로운 실험 설계를 가능하게 한다. 예를 들어 다양한 손가락 길이나 관절 강성을 가진 변형 로봇들을 한 배치 안에서 동시에 훈련시키는 morphology-conditioned policy 학습이 가능해진다.
접촉 동역학 정확도: 손-물체 접촉은 다수의 접촉점이 동시에 활성화되는 복잡한 상황이다. PADMM의 통합 접촉 처리가 이런 환경에서 어떤 성능을 보이는지는 추가 연구가 필요하다. 특히 마찰 모델링의 정확도와 접촉 안정성이 실용적 측면에서 중요하다.
요약 및 결론
Kamino가 해결한 문제를 한 문장으로 정리하면:
“닫힌 운동학적 루프를 가진 복잡한 로봇을, GPU 위에서 수천 개 동시에, 근사 없이 정확하게 시뮬레이션한다.”
이를 위해:
- 최대 좌표계로 임의 토폴로지를 통일적으로 표현하고,
- Proximal-ADMM으로 bilateral/unilateral/접촉 제약을 하나의 프레임워크에서 처리하며,
- Block-Cholesky 또는 Conjugate Residual 선형 솔버로 Delassus 시스템을 효율적으로 풀고,
- CUDA Graph Capture + 이종 world 마스킹으로 GPU 병렬화를 실현한다.
논문의 기여는 기술적 신기함이 아니다. 이미 알려진 수학적 도구들을 GPU 병렬 RL 스케일에 맞게 엔지니어링한 것이다. 4절 링크를 가진 이족보행 로봇 DR Legs에 대해 4096개 병렬 환경에서 RL 보행 정책을 학습했다는 사실 자체가, “이론은 있었지만 실행이 불가능했던” 영역을 처음으로 실용 영역으로 끌어낸 증거다.
물론 한계는 분명하다. 루프 없는 로봇에는 느리고, 단일 환경 실시간 시뮬레이션에는 부적합하며, 아직 베타 단계다. 미분 가능성도 지원하지 않는다. 하지만 이 논문이 열어준 공간 — 복잡한 메커니즘을 가진 로봇을 위한 대규모 RL 학습 — 은 분명히 중요하고, 타이밍도 정확하다. 병렬 기구, 텐던 구동, 다중 접촉 로봇이 실용화되는 시점에 이 솔버가 등장했다.
앞으로 Isaac Lab 통합이 완료되고 미분 가능성이 추가된다면, Kamino는 단순한 특수 목적 솔버를 넘어 차세대 로봇 시뮬레이션 스택의 중요한 구성 요소가 될 가능성이 높다.
참고문헌 및 관련 자료
- Kamino 논문 (arXiv:2603.16536)
- Kamino 알고리즘 기반 논문 (arXiv:2504.19771) — 핵심 수식과 PADMM 유도
- Kamino 프로젝트 페이지
- Newton Physics Engine (GitHub)
- NVIDIA Warp
- Isaac Lab
- Macklin et al., “XPBD: Position-Based Simulation of Compliant Constrained Dynamics” (2016) — penalty 기반 비교 기준
- Featherstone, “Rigid Body Dynamics Algorithms” (2008) — ABA의 원전