flowchart TD
A[Object contacts replaceable transparent cover] --> B[Soft gel transmits load, Poisson effect]
B --> C[Dyed sensing layer shears, never touches object]
C --> D[Wide-angle camera images grid from below]
D --> E[Undistort image, extract quadrilateral markers]
E --> F[Fit B-spline surface to control points]
F --> G[Shear metric: scaled L2-norm vs reference surface]
G --> H[Force via affine fit / contact centroid]
style A fill:#ffe9b3
style C fill:#b3e0ff
📃Shear-Based Optical Tactile Sensor
tactile
sensor
quadruped
A Robust Shear-Based Optical Tactile Sensor for Quadruped-Mounted Manipulation
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
논문 그림 1
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
한 문장으로 보는 이 논문
이 논문은 새 센서를 발명한 논문이 아니라, 이미 만들어진 전단 기반 광학 촉각 센서(NUSense)를 “사족보행 로봇 위에서도 살아남는 야외용 촉각 프론트엔드”라는 관점으로 다시 해석하고, 실제 사족보행 매니퓰레이터에 통합한 시스템 통합(integration) 논문입니다. 저자(Assylkhan Seitzhanov, Jabrail Chumakov, Zhanat Kappassov, Nazarbayev University)는 별도의 새로운 측정 원리를 제안하기보다, NUSense의 핵심 설계 선택이 왜 야외/이동 매니퓰레이션 환경에 잘 맞는가를 논증합니다.
왜 “사족보행 로봇 + 촉각”이 어려운가
비전 기반 촉각 센서(Vision-Based Tactile Sensor, VBTS)는 책상 위 실험(benchtop)에서는 잘 동작합니다. 카메라 한 대로 접촉력·표면 형상·미끄럼 같은 풍부한 정보를 저렴하게 얻을 수 있기 때문입니다. 그러나 사족보행 로봇에 팔을 달아 움직이며 조작(mobile manipulation)하는 순간, 작동 환경이 완전히 달라집니다. 논문이 지적하는 세 가지 가혹 조건은 다음과 같습니다.
- 보행으로 인한 몸체 흔들림(body sway) 이 팔을 통해 계획되지 않은 하중(unplanned load)을 센서에 전달한다.
- 접근 과정에서 엔드이펙터가 지면이나 장애물을 스치는(brush against terrain) 일이 잦다.
- 야외에서는 책상 실험에 없던 흙·먼지 같은 잔해(field debris) 가 센싱 표면에 닿는다.
기존 VBTS의 구조적 약점
논문이 정확히 짚는 핵심은 “센싱 트랜스듀서(transducer)가 물체와 닿는 바로 그 표면 위에 놓여 있다” 는 점입니다. GelSight, DIGIT, GelSlim은 반사 엘라스토머의 변형으로 표면 법선을 복원하고, TacTip은 부드러운 돔 안의 생체모방 핀 배열로 법선을 증폭합니다. 이들 모두 신호를 만드는 요소와 마모되는 표면이 같은 곳입니다. 그래서 젤 표면에 긁힘이 쌓이거나(gel-based), 박혀 있던 마커가 반복 하중으로 드리프트(marker-based)하면 신호 자체가 망가집니다. 실험실에서는 수백 회 접촉마다 교체해도 괜찮지만, 야외에서는 비현실적입니다.
이 논문의 해법: 마모면과 신호면을 분리한다
NUSense는 다른 길을 택합니다. 기계적으로 수동적인(passive) 투명 커버를 염색된 센싱층 위에 덮어, 물체와 닿는 것은 오직 커버뿐이고, 마모되면 커버만 교체합니다. 즉 신호 품질(signal quality) 과 표면 마모(surface wear) 를 구조적으로 분리합니다. 이 논문은 바로 이 “분리” 성질을 이동 배치(mobile deployment)에 활용할 핵심 자산으로 봅니다.

논문 그림 2
직관 비유
촉각 센서를 “속이 비치는 색 격자 푸딩” 으로 상상해 봅시다. 물체를 누르거나 비스듬히 밀면 푸딩 안의 빨강·노랑 격자가 옆으로 쏠리고, 바닥의 카메라가 그 쏠림을 읽습니다. 여기서 이 논문의 차별점은 푸딩 위에 별도의 투명 유리뚜껑(교체형 커버)을 한 장 더 덮어 둔 것입니다. 발로 걷는 로봇이 험한 곳에 푸딩을 스치게 해도, 긁히는 것은 색 격자가 아니라 뚜껑입니다. 뚜껑이 좀 흐려지거나 베여도 색 격자의 쏠림은 그대로 보이고, 정 못 쓰게 되면 뚜껑만 몇 분 만에 갈아 끼우면 됩니다.
방법
이 논문의 측정 원리·하드웨어 세부는 선행 연구 NUSense(Yergibay et al., IROS 2025)에서 정립된 것을 그대로 가져오며, 논문은 이를 야외 배치 관점에서 재서술합니다. 아래는 논문 본문(Sec. II)에 기술된 내용입니다.
전단 기반 센싱의 물리
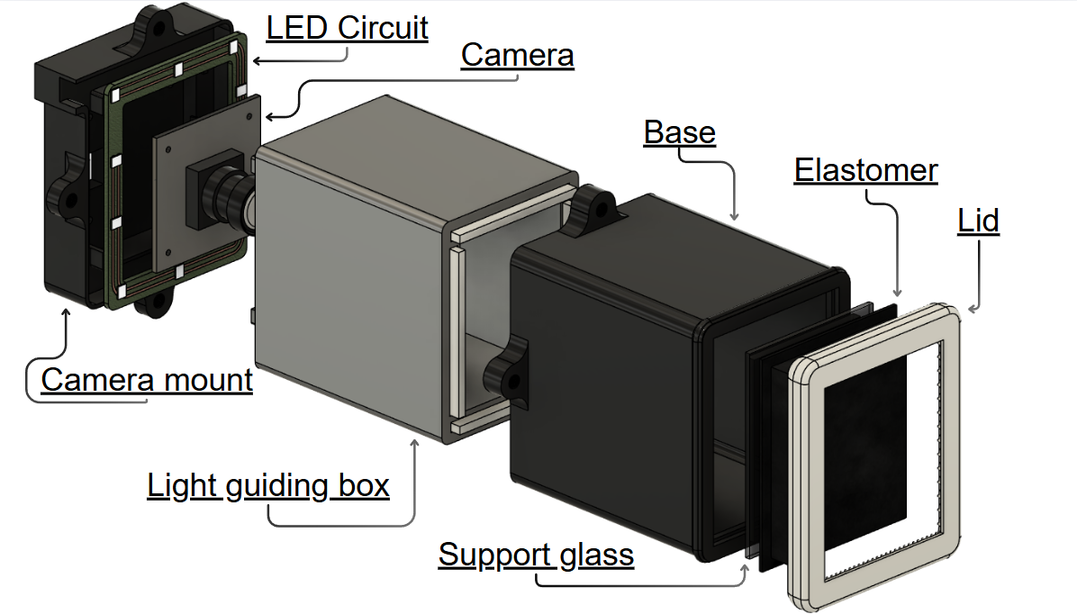
NUSense는 염색된 실리콘층의 전단 변형률(shear strain) 을 아래에서 광각 카메라로 촬영해 측정합니다. 부드러운 패드에 법선 하중(normal load)이 가해지면 푸아송 효과(Poisson effect) 로 센싱층에 접선 방향 변위(tangential displacement)가 생기고, 색 격자(colored grid)가 일그러지는 정도가 이 전단을 정량화합니다.
직관: 말랑한 재료를 위에서 누르면 옆으로 퍼지려 합니다. 그래서 수직으로 눌러도 표면 패턴은 “옆으로” 흐릅니다. 이 옆쏠림이 곧 전단 신호의 원천입니다.
표면 복원과 전단 지표 (Eq. 1)
왜곡 보정된(undistorted) 이미지에서 사각형 마커(quadrilateral marker)로부터 제어점(control point)을 추출하고, 여기에 B-스플라인 곡면(B-spline surface) 을 피팅합니다. 그런 다음 부하 상태 곡면과 기준(reference) 곡면 사이의 스케일된 L2-노름으로 접촉의 전단 변형률을 계산합니다.
\gamma_{ss} = \alpha \sum_{i=1}^{K} \left\| s_i - s_i^{\text{ref}} \right\|_2 \tag{1}
- s_i : 부하 상태 곡면의 i번째 샘플 점, s_i^{\text{ref}} : 기준 곡면의 대응 점,
- K : 샘플 점 개수,
- \alpha : 스케일링 상수.
- (전체 유도는 NUSense 원논문 [1]에 있음)
야외 배치에서 핵심이 되는 성질: \gamma_{ss}는 개별 마커를 추적(tracking)하는 것이 아니라 전체 샘플 곡면에 걸친 변위를 합산(aggregate) 합니다. 따라서 국소적인 대비 손실(local contrast loss)이나 격자 일부 왜곡이 생겨도 신호가 심하게 무너지지 않습니다. 이것이 “robust(강건)”의 알고리즘적 근거입니다 — 한두 마커가 안 보여도 합계는 거의 그대로입니다.
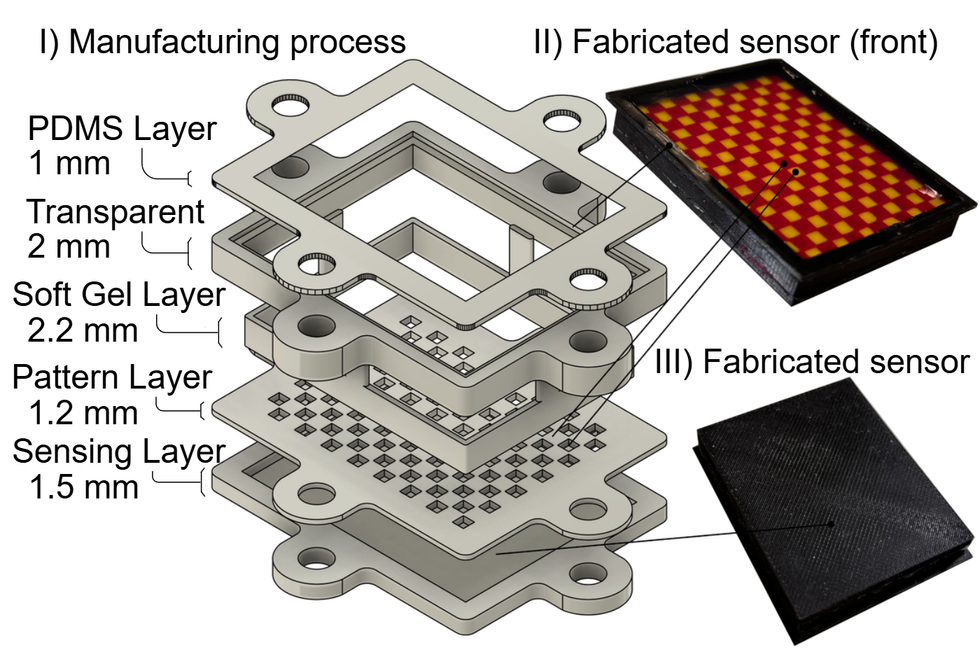
층(layer) 구조: 네 겹 실리콘 스택
NUSense 소프트 패드는 유리 광학창에서 바깥쪽으로 다음 네 층(실리콘 계열)을 쌓습니다.
| 층 (안쪽 → 바깥쪽) | 재료/역할 |
|---|---|
| PDMS 접착층 | 스택을 광학창(Plexiglas)에 본딩 |
| 투명 소프트 젤 (2.2 mm) | Techsil RTV27905 — 하중을 센싱층에 전달 |
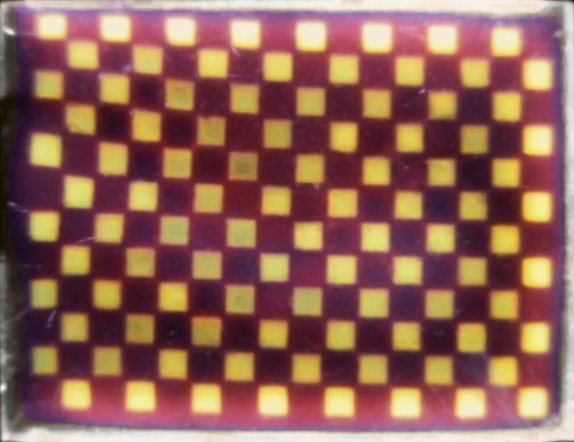
| 염색 센싱층 | Sorta-Clear 18 + 노랑/빨강 색소, 체커보드 패턴 — 가시적 전단 응답 생성 |
| 투명 커버 | 센싱층과 같은 재료 — 내부를 보호, 물체와 닿는 유일한 면 |
야외 배치에 중요한 성질을 논문은 이렇게 정리합니다.
- 센싱층은 물체에 절대 닿지 않는다. 커버의 긁힘이 색 마커를 건드리지 않는다.
- 커버는 기계적으로 수동적이다. 식 (1)은 커버의 광학적 품질이 아니라 마커 변위에 의존하므로, 커버가 흐려져도 신호 손실이 아니라 점진적 노이즈 증가로만 나타난다.
- 커버 교체는 센서를 분해하지 않고 가능해, 야외 정비가 “센서 전체 교체”에서 “몇 분 작업”으로 줄어든다.
논문 그림 3
제작 (Fabrication)
센싱층은 2단계 캐스팅으로 만듭니다. 먼저 노랑 색소를 넣은 Sorta-Clear 18을 패턴 몰드에 붓고 경화한 뒤, 빨강 색소 상(phase)이 격자의 빈 영역을 채워 12×9 체커보드를 만듭니다. 그 위에 소프트 젤(2.2 mm)과 투명 커버를 순서대로 캐스팅하고, 얇은 PDMS층으로 LED 백라이트가 달린 Plexiglas 광학창에 본딩합니다. 유효 접촉 면적은 50×38 mm, 엘라스토머는 카메라의 55 mm 초점거리 위치에 둡니다.
의사코드로 본 추정 파이프라인
Input : current camera frame, reference B-spline surface S_ref
Output: shear metric gamma_ss, normal force F, contact location
1. frame <- undistort(frame)
2. markers <- detect_quadrilateral_markers(frame)
3. P <- control_points(markers)
4. S <- fit_bspline_surface(P)
5. gamma_ss <- alpha * sum_i || S(i) - S_ref(i) ||_2 # Eq.(1)
6. F <- 3.09 * gamma_ss - 1.14 # Eq.(2), 1-8 N
7. loc <- centroid(shear distribution)
8. return gamma_ss, F, loc실험
논문은 새 실험을 대규모로 수행하기보다, NUSense [1]에서 보고된 4가지 특성 중 “이동 배치에 직접 관련된 것”을 골라 재해석합니다(Sec. III). 아래 수치는 논문 본문에 명시된 값입니다.
1) 힘 응답 (Force response)
둥근 팁(반지름 5 mm) 인덴터로 8 N까지, 평평한 팁 인덴터로 3 N까지 패드를 누른 결과, 선형 피팅이 1–8 N 구간에서 성립합니다.
F = 3.09\,\gamma_{ss} - 1.14 \tag{2}
해석: 이 범위는 부드러운 물체와의 일반적 상호작용 힘을 포괄하며, 선형이라는 것은 접촉마다 재캘리브레이션 없이 단일 아핀 변환(affine transform)으로 힘을 복원할 수 있다는 뜻입니다. 학습 모델이 필요 없습니다.
논문 그림 4
2) 반복성 (Repeatability)
센서 중심에서 8 N 접촉을 70회 반복한 결과, 최대 \gamma_{ss} 분포의 변동계수(coefficient of variation, CV)가 4% 미만이고 눈에 띄는 드리프트가 없었습니다.
해석: 위에 있는 커버에 반복 하중이 가해져도 아래 염색 센싱층의 광학 응답은 이동(migrate)하지 않습니다 — 마커 드리프트 문제(기존 마커 기반 센서의 약점)를 구조적으로 회피한 셈입니다.
3) 접촉 위치 추정 (Contact localization)
6.4 × 7.0 mm 격자의 24개 인덴테이션 점을 6 N으로 누르고 전단 무게중심(shear centroid)으로 접촉 위치를 추정한 결과, RMS 오차 0.50 ± 0.09 mm.
해석: 50×38 mm 패드에서 서브밀리미터(sub-millimeter) 정밀도는 파지와 촉각 탐색에 충분합니다. 격자 간격(6.4–7.0 mm)보다 훨씬 작은 오차이므로 셀 단위 분해능이 양호합니다.
4) 커버 손상 강건성 (Robustness under cover damage)
- 새 패드, (b) 교체 패드, (c) 보호 커버를 의도적으로 벤(cut) 패드 세 가지를 1–4 N 접촉으로 비교했습니다. 세 경우 모두 힘과 상관된 \gamma_{ss}를 산출하며 기울기(slope)가 거의 일치하고, 차이는 오직 바이어스(bias)뿐이었습니다.
해석: 이것이 논문 제목 “Robust”의 가장 강한 증거입니다. 커버가 손상돼도 센서는 단지 교체 가능한 것이 아니라 여전히 작동(functional) 합니다. 손상된 상태에서도 피팅의 바이어스만 다시 잡으면(rebiasing) 힘 추정을 복원할 수 있고, 전체 재캘리브레이션은 커버를 갈아 끼운 뒤에만 필요합니다.
논문 그림 5
특성 요약표
| 항목 | 결과 | 이동 배치에서의 의미 |
|---|---|---|
| 힘 응답 | F=3.09\gamma_{ss}-1.14, 1–8 N 선형 | 보행 흔들림이 만드는 과도하중(transient)을 선형 응답으로 수용 |
| 반복성 | 70회 8 N, CV < 4%, 드리프트 없음 | 마커 드리프트 없는 안정적 측정 |
| 위치 추정 | RMS 0.50 ± 0.09 mm (24점, 6 N) | 서브밀리미터 — 파지/탐색에 충분 |
| 손상 강건성 | 베인 커버에서도 기울기 일치, 바이어스만 차이 | 손상돼도 동작, 야외 정비 부담 최소화 |
| 유효 접촉 면적 | 50 × 38 mm | 비교적 넓은 단일 패드 |
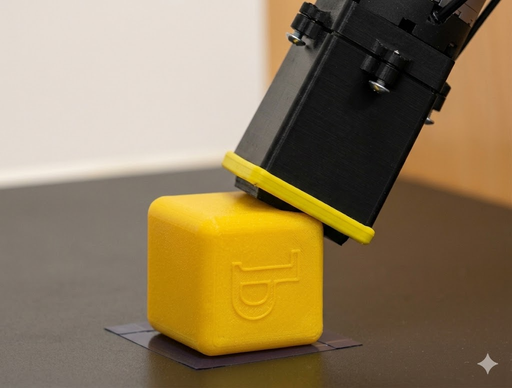
시스템 통합 (System Integration, Sec. IV)
논문이 새로 보여주는 실증은 하드웨어 통합입니다.
- NUSense를 Unitree Z1 Pro 로봇팔 엔드이펙터에 3D 프린팅 어댑터로 장착하고, 센서 접촉면 법선이 팔의 접근 방향과 일치하도록 배향.
- eye-in-hand 절차로 센서 프레임을 로봇 베이스에 캘리브레이션 → 센서 프레임에서 추정한 접촉 무게중심을 베이스 좌표로 표현 가능.
- 이 팔을 Unitree B2-W 사족보행 로봇에 커스텀 어댑터로 올려 이동 매니퓰레이터를 구성.
논문은 이동 작동의 각 요소를 센서 성질에 대응시킵니다: 보행 흔들림 → 1–8 N 선형 응답이 과도하중을 수용 / 지면·장애물 스침 → 교체형 커버가 마모를 흡수 / 야외 정비 → 카메라 내부 파라미터 재캘리브레이션이나 센싱층 기하 교란 없이 커버만 교체.
아직 “계획(planned)” 단계인 실험
중요한 점은, 본 워크숍 논문이 이동 플랫폼 위에서의 정량적 검증을 아직 진행 중(work in progress) 으로 명시한다는 것입니다. 논문이 계획된 실험(planned experiments) 으로 나열한 것은 다음과 같습니다.
- 보행+조작 동시 수행 중 미지 물체의 접촉 기반 탐색(contact-driven exploration),
- 동일 작업량(matched workload)에서 젤 기반 베이스라인과의 비교,
- 현실적 야외 마모 조건에서의 커버 교체 주기 평가.
즉 사족보행 동적 환경에서의 실제 측정 결과는 아직 논문에 제시되지 않았습니다. 본 논문의 정량 데이터는 모두 벤치탑 특성화(선행 NUSense)에서 가져온 것이며, 사족보행 통합은 하드웨어 구성과 정성적 매핑(mapping) 수준입니다.
비판적 고찰
강점
- 마모면과 신호면의 분리라는 명확한 설계 철학: “센싱층은 물체에 닿지 않는다”는 단순하지만 강력한 아이디어로, 야외 VBTS의 가장 큰 실패 모드(표면 마모로 인한 신호 붕괴)를 정조준합니다.
- 손상돼도 동작한다는 실증: 의도적으로 벤 커버에서도 기울기가 유지되고 바이어스만 달라진다는 결과는, 단순한 “교체 가능”을 넘어 “결함 허용(graceful degradation)”을 정량적으로 보여 줍니다.
- 학습 불필요·해석 가능: 전단 지표(L2-노름)·B-스플라인·아핀 힘 피팅 모두 물리/기하 기반이라, 적은 캘리브레이션으로 동작하고 디버깅이 쉽습니다. 데이터가 귀한 야지 로봇에 적합합니다.
- 전단을 1급 신호로: 법선력만이 아니라 접선 변형을 직접 측정하므로 미끄럼·방향 정보 활용 여지가 있습니다.
약점·한계
- 사족보행 실증의 부재(가장 큰 한계): 제목과 초록이 “Quadruped-Mounted”를 내세우지만, 보행 중 실제 동적 측정 결과는 본문에 없습니다. 핵심 주장(보행 흔들림·진동 환경에서의 강건성)은 벤치탑 특성과 정성적 논증에 의존합니다. 이 부분은 논문 스스로 “work in progress”로 인정합니다.
- 모델 가정의 한계가 그대로 승계됨: 논문도 명시하듯, 등방성 패드 가정(isotropic pad assumption), 탄성 영역(elastic-regime) 작동, 1 N 미만에서 감도 저하가 NUSense에서 그대로 넘어옵니다. 무거운 물체나 미세 접촉에는 제약이 있습니다.
- 동작 범위 1–8 N: 8 N 초과 강한 접촉은 다루지 못합니다. 무게 있는 물체를 다루는 매니퓰레이션 확장에는 범위 확대가 필요합니다.
- 대역폭(프레임레이트) 명시 부족: 본문에 카메라 샘플링 속도가 명시되지 않아, 보행이 유발하는 고주파 진동을 충분히 잡을 수 있는지는 불확실합니다 (추측). 고속 동적 미끄럼 감지에는 한계가 있을 가능성이 있습니다.
- 스칼라 전단 지표의 한계: \gamma_{ss}는 “얼마나 밀렸나”는 잘 합산하지만, 3축 힘 벡터로의 완전한 분해를 직접 제공하지는 않습니다.
관련 연구 비교
논문이 참조하는 선행 연구를 기준으로 정리하면 다음과 같습니다.
| 센서/연구 | 신호 원리 | 마모면 vs 신호면 | 비고 |
|---|---|---|---|
| 본 논문 (NUSense 기반, Quadruped) | 색 격자 전단 + B-spline, \gamma_{ss} | 분리됨 (교체형 커버) | 야외/이동 배치 지향, 통합 단계 |
| NUSense [1] (IROS 2025) | 동일 전단 광학 원리 | 분리됨 | 직접 선행 연구, 모든 정량 데이터 출처 |
| GelSight [2] | 반사 엘라스토머 광도 측정 | 같은 면 (마모 누적) | 고해상 형상, 대표 베이스라인 |
| DIGIT [3] | 소형 비전 촉각 | 같은 면 | 저가·소형, 인핸드 조작 |
| GelSlim 3.0 [11] | 형상·힘·미끄럼 측정 | 같은 면 | 컴팩트 핑거형 |
| TacTip [4] | 핀 배열 변형(생체모방) | 같은 면 (마커 드리프트) | 부드러운 돔, 마커 기반 |
이 표의 큰 그림: GelSight 계열은 고해상 형상에 강하지만 센싱면이 곧 마모면이라 야외에서 취약합니다. 본 논문 계열의 독자적 위치는 “센싱층을 물리적으로 보호하고, 손상돼도 전단 지표가 살아남는다”는 강건성·정비성 축입니다. 사족보행처럼 센서가 다치기 쉬운 무대에서는 이 축이 가장 값집니다.
요약 및 결론
이 논문의 메시지는 세 가지로 압축됩니다.
- 마모면과 신호면을 분리하라: 교체형 투명 커버 뒤에 염색 센싱층을 두어, 물체와 닿는 것은 커버뿐이게 한다. 야외 VBTS의 핵심 실패 모드를 구조적으로 제거한다.
- 전단 지표는 합산이라 강건하다: \gamma_{ss}는 전체 곡면 변위를 합산하므로 국소 손상·대비 손실에 둔감하고, 커버를 베어도 힘 추정의 기울기가 유지된다(바이어스만 보정).
- 이동 매니퓰레이터로의 통합: NUSense를 Unitree Z1 Pro 팔 + B2-W 사족보행 로봇에 장착해 야외 촉각 프론트엔드로 구성했다.

논문 그림 6
확인된 정량적 근거는 견고합니다 — 1–8 N 선형 힘 응답(F=3.09\gamma_{ss}-1.14), 70회 반복에서 CV < 4%, 24점에서 위치 RMS 0.50 ± 0.09 mm, 베인 커버에서도 유지되는 힘 상관성. 다만 이 데이터는 모두 벤치탑 특성화에서 온 것이고, 제목이 약속하는 “사족보행 위에서의 강건성”에 대한 직접적 동적 검증은 아직 진행 중(work in progress) 입니다. 따라서 본 논문은 잘 검증된 센서를 야외 이동 매니퓰레이션 관점으로 재포지셔닝하고 통합 경로를 제시한 비전 제안 + 통합 보고서로 읽는 것이 정확합니다.
로봇공학 실무자 관점에서, 이 센서는 “실험실 밖으로 나가는 촉각”의 설득력 있는 후보입니다. 다만 채택 전에는 (1) 보행 진동 대역과 카메라 프레임레이트의 궁합, (2) 1–8 N을 넘어서는 하중 범위 확장, (3) 등방성·탄성 가정의 적용 한계를 함께 검토해야 하며, 무엇보다 논문이 예고한 보행 중 동적 실증 결과가 후속으로 나오는지가 실제 가치를 가를 것입니다.
Tip한 줄 요약
“색 격자 센싱층은 물체에 닿지 않게 숨기고, 마모는 교체형 투명 커버가 대신 받게 하라” — 고해상도·고속이 아니라 마모면/신호면 분리에 기반한 강건성과 정비성으로 야외 이동 매니퓰레이션을 노린 전단 기반 광학 촉각 센서의 통합 연구.