flowchart LR
REF["Reference Trajectory<br/>ŝ_0 → ŝ_1 → ... → ŝ_T"]
subgraph ROLL["Learner Rollout (Brax, 미분 가능)"]
S0["s_0"] -->|a_0~π_θ| S1["s_1"]
S1 -->|a_1| S2["s_2"]
S2 -.->|Demo Replay:<br/>오차 크면 ŝ로 교체| S3["ŝ_3"]
S3 -->|a_3| S4["s_4"]
end
REF -->|step-wise L2| LOSS["L = Σ ‖s_t − ŝ_t‖²"]
ROLL --> LOSS
LOSS -->|analytical gradient<br/>∇_θ L (BPTT)| POLICY["Policy π_θ 업데이트"]
POLICY -.-> ROLL
📃DiffMimic
differentiable-physics
motion-mimicking
character-animation
rl
DiffMimic: Efficient Motion Mimicking with Differentiable Physics
- 🚀 기존 RL 기반 모션 미믹킹의 비효율성을 개선하기 위해, 본 논문은 Differentiable Physics Simulators (DPS)를 활용하여 복잡한 정책 학습 문제를 단순한 상태 매칭 문제로 재구성하는 DiffMimic을 제안합니다.
- 💡 DiffMimic은 DPS의 분석적 그래디언트를 사용하여 정책을 직접 최적화함으로써 RL 기반 방식보다 훨씬 빠르고 안정적인 수렴을 달성하며, local optima를 피하고 긴 horizon에서 그래디언트 전파를 안정화하기 위해 Demonstration Replay 메커니즘을 도입합니다.
- ⏱️ 광범위한 실험 결과, DiffMimic은 DeepMimic과 같은 기존 방법론 대비 우수한 샘플 및 시간 효율성을 보여주며, 특히 Backflip과 같은 어려운 동작을 단 10분 만에 학습하고 3시간 만에 반복할 수 있음을 입증했습니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
DIFFMIMIC는 물리 기반 캐릭터 애니메이션의 핵심 과제인 모션 미믹킹(motion mimicking)을 위해 미분 가능한 물리 시뮬레이터(Differentiable Physics Simulators, DPS)를 활용하는 효율적인 방법을 제안합니다. 기존의 모션 미믹킹 방법론들은 대부분 강화 학습(Reinforcement Learning, RL)에 기반하며, 이로 인해 보상 함수 설계의 어려움(heavy reward engineering), 높은 분산(high variance), 느린 수렴(slow convergence), 그리고 탐색의 어려움(hard explorations)과 같은 문제에 직면해 있었습니다. 특히, 단순한 모션 시퀀스를 모방하는 데 수십 시간 또는 며칠의 훈련 시간이 소요되어 확장성(scalability)이 부족했습니다.
DiffMimic은 이러한 문제를 해결하기 위해 모션 미믹킹을 복잡한 정책 학습(policy learning) 문제가 아닌 훨씬 간단한 상태 매칭(state matching) 문제로 재정의합니다. 핵심 아이디어는 DPS가 제공하는 분석적 기울기(analytical gradients)를 활용하여 지면 진리(ground-truth) 물리적 사전 정보와 함께 정책을 안정적으로 학습시키는 것입니다. 이는 RL 기반 방법보다 훨씬 빠르고 안정적인 수렴을 가능하게 합니다.
논문 그림 1
핵심 방법론:
- 환경 설정:
Brax프레임워크를 기반으로 환경을 구축하며,DeepMimic의 설계를 따르는 13개의 링크와 34개의 자유도(degrees of freedom)를 가진 휴머노이드(humanoid) 캐릭터를 사용합니다.- 상태(state) s는 모든 링크의 전역 위치 p, 회전 q, 선형 속도 \dot{p}, 각속도 \dot{q}, 그리고 타임스탬프 역할을 하는 위상 변수(phase variable) \varphi를 포함합니다: s := \{p, q, \dot{p}, \dot{q}, \varphi\}.
- PD 컨트롤러(PD controller)를 사용하여 캐릭터를 구동하며, 정책 네트워크는 각 조인트의 목표 각도를 예측합니다.
- 모션 미믹킹을 위한 미분 가능한 물리 활용:
- DiffMimic은 정책 롤아웃(policy rollout)과 참조 모션(reference motion) 간의 거리를 직접 최소화하는 것을 목표로 합니다.
- 손실 함수 L은 롤아웃 궤적(s_t)과 참조 궤적(\hat{s}_t) 간의 단계별(step-wise) L_2 거리의 합으로 정의됩니다: L = \sum_{t=1}^T \|s_t - \hat{s}_t\|^2_2
- 여기서 \|s_t - \hat{s}_t\|^2_2는 다음과 같이 전역 위치, 회전(6D 회전 표현 사용), 선형 속도, 각속도에 대한 가중 합으로 구성됩니다: \|s_t - \hat{s}_t\|^2_2 = \frac{1}{\|J\|}\sum_{j \in J} w_p(p_j - \hat{p}_j)^2 + w_r(q_j - \hat{q}_j)^2 + w_v(\dot{p}_j - \hat{\dot{p}}_j)^2 + w_a(\dot{q}_j - \hat{\dot{q}}_j)^2 p_j, \hat{p}_j는 J번째 조인트의 전역 위치, q_j, \hat{q}_j는 전역 회전, \dot{p}_j, \hat{\dot{p}}_j는 선형 속도, \dot{q}_j, \hat{\dot{q}}_j는 각속도입니다. w_p, w_r, w_v, w_a는 가중치입니다.
- DPS는 동적 시스템의 전이 함수(transition function) T 역할을 하며, s_{t+1} = T(s_t, a_t)와 같이 다음 상태를 생성합니다. DPS가 완전 미분 가능하기 때문에, 손실 함수에서 행동 a_t와 상태 s_t에 대한 기울기를 직접 유도할 수 있습니다: \frac{\partial L}{\partial a_t} = \left(\frac{\partial L}{\partial T(s_t, a_t)}\right) \left(\frac{\partial T(s_t, a_t)}{\partial a_t}\right) \frac{\partial L}{\partial s_t} = \left(\frac{\partial L}{\partial T(s_t, a_t)}\right) \left(\frac{\partial T(s_t, a_t)}{\partial s_t}\right) 이 기울기는 전체 궤적에 걸쳐 재귀적으로 역전파(backpropagated)되어 정책을 최적화합니다.
- 데모 재현 (Demonstration Replay) 메커니즘:
- DPS를 사용한 정책 학습은 장기간 궤적에서 기울기 폭주/소실(exploding/vanishing gradients) 문제, 지역 최적점(local optima)에 갇히는 문제, 그리고 접촉이 풍부한(contact-rich) 환경에서 노이즈가 많거나 잘못된 기울기 문제에 직면할 수 있습니다.
- 이러한 문제와 롤아웃 궤적이 참조 궤적에서 벗어나는 분포 변화(distributional shift)를 완화하기 위해
Demonstration Replay가 도입됩니다. Demonstration Replay는 시뮬레이션된 상태(s_t)와 참조 상태(\hat{s}_t) 간의 포즈 오류(pose error)가 특정 임계값 \epsilon을 초과할 경우, 현재 시뮬레이션된 상태를 해당 참조 상태로 대체하여 롤아웃을 안내합니다: s_{t+1} = \begin{cases} T(s_t, a_t), \quad a_t \sim \pi_\theta(a|s_t) & \text{if } \|s_t - \hat{s}_t\|^2_2 < \epsilon \\ T(\hat{s}_t, a_t), \quad a_t \sim \pi_\theta(a|\hat{s}_t) & \text{otherwise} \end{cases} 이 메커니즘은 정책의 학습을 안정화하고 더 부드러운 기울기 추정(smoother gradient estimation)을 제공하여 지역 최적점에서 벗어나 더 충실하게 참조 모션을 모방하도록 돕습니다.
논문 그림 2
실험 결과:
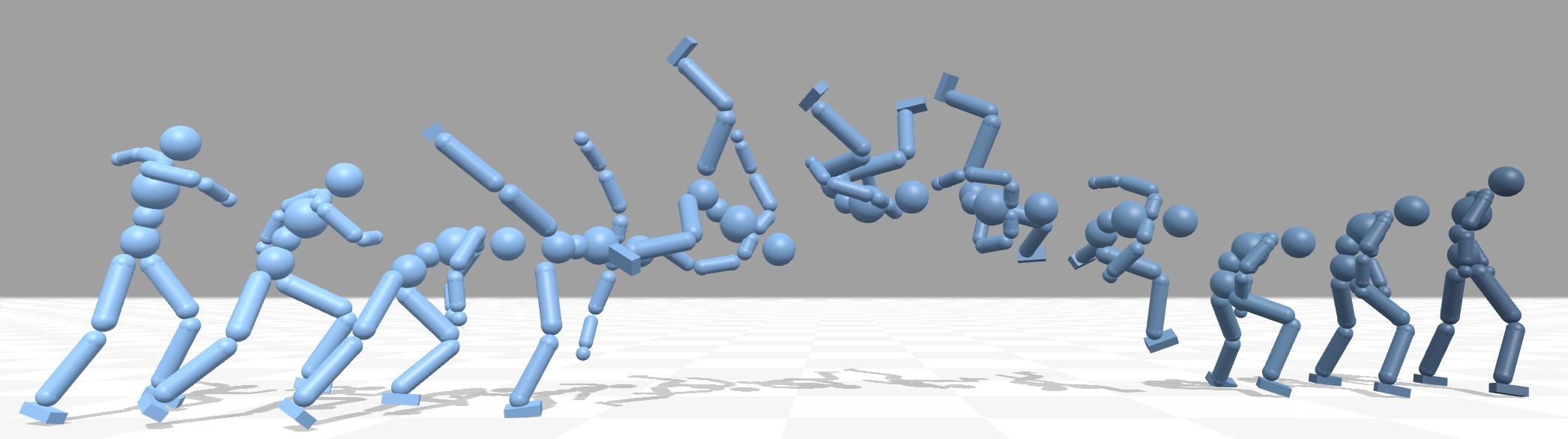
DiffMimic은 DeepMimic, AMP, Spacetime Bound와 같은 기존 RL 기반 방법론들과 비교하여 우수한 샘플 효율성(sample efficiency)과 시간 효율성(time efficiency)을 보여줍니다. 특히, 도전적인 Backflip 모션을 단 10분 만에 학습하고, 3시간 만에 반복적으로 수행할 수 있음을 입증했습니다. 이는 기존 방법들이 Backflip을 순환적으로 수행하는 데 약 하루가 걸리는 것과 대조적입니다. 또한, Demonstration Replay가 정책 학습의 안정화와 성능 향상에 기여하며, 특히 Demonstration Replay (Threshold) 방식이 더 높은 충실도로 데모를 재현함을 정성적 및 정량적 분석을 통해 보여주었습니다.
궁극적으로 DiffMimic은 DPS를 활용한 모션 미믹킹의 새로운 시작점을 제시하며, 향후 미분 가능한 의류 시뮬레이션 등 더 복잡한 미분 가능한 애니메이션 시스템에도 적용될 수 있기를 기대합니다.
논문 그림 3
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
Motion mimicking은 시연된 모션 궤적을 복원하는 제어 신호를 만드는 정책을 찾는 일로, 물리 기반 캐릭터 애니메이션의 근간이며 control stylization·skill composition 같은 응용의 전제 조건입니다. 최근 큰 진전이 있었지만, 기존 방법은 대부분 RL 을 채택해 보상 함수와 제어 정책을 번갈아 학습합니다. 이 방식엔 두 가지 고질적 문제가 있습니다.
- 확장성: 단일 모션 하나를 모방하는 데도 수십 시간~며칠이 걸립니다.
- 보상 설계 의존: 성능이 정교하게 설계/학습된 보상 함수의 품질에 크게 의존해, 복잡한 실세계 응용으로의 일반화가 어렵습니다.
한편 미분 가능 물리 시뮬레이터(DPS) 가 로봇 제어·그래픽스에서 인상적인 성과를 냈습니다. DPS는 물리 연산자를 미분 가능한 계산 그래프 로 다뤄, 목표(즉 보상)로부터 제어 정책으로 기울기를 직접 전파 합니다. 보상 함수와 정책을 번갈아 학습할 필요 없이, 제어 정책 학습을 직접적이고 효율적인 최적화 로 풀 수 있습니다.
하지만 DPS도 만능은 아닙니다. 해석적 환경 기울기를 갖더라도, 특히 stiff하고 불연속적인 기울기 를 내는 contact-rich 물리 시스템에서는 local optima에 쉽게 빠집니다. 또 긴 궤적에서는 역전파 경로를 따라 수치 기울기가 소실/폭발 할 수 있습니다.
DiffMimic의 한 줄 요약: motion mimicking을 상태 매칭 문제 로 재정식화하고, DPS의 미분 가능 dynamics로 궤적 거리의 기울기를 정책에 직접 전파해 1차 기울기로 샘플 효율을 크게 높이며, Demonstration Replay 로 long-horizon·local-minima 문제를 안정화한다. DiffMimic은 DPS를 motion mimicking에 처음 적용 한 연구이며, 시뮬레이터를 표준 벤치마크로 공개합니다.
방법
미분 가능 물리 엔진 속 모방 환경
환경은 Brax 로 구축합니다. 캐릭터는 DeepMimic을 따라 설계한 humanoid로, 13개 링크, 34 자유도, 45kg, 1.62m 입니다. 모든 링크가 바닥과 접촉할 수 있고, GPU 병렬화로 가속하며 시뮬레이터는 480 FPS 로 업데이트됩니다. 더 부드러운 기울기 전파를 위해 관절 한계를 완화 하고, 마찰 계수 등은 DeepMimic과 동일하게 유지합니다.
상태와 행동. 상태는 모든 링크의 위치 p, 회전 q, 선속도 \dot p, 각속도 \dot q 를 로컬 좌표로 담고, 추가로 phase 변수 \phi \in [0,1] 를 타임스탬프로 넣습니다: s := \{p, q, \dot p, \dot q, \phi\}. PD 컨트롤러 로 캐릭터를 구동하며, 목표 각도 \tilde q 에 대해 토크는
\tau = k_p(\tilde q - q) + k_d(\dot{\tilde q} - \dot q)
정책 네트워크가 각 관절의 PD 목표 각도를 30 FPS 로 예측합니다(k_p, k_d 는 DeepMimic과 동일).
미분 가능 물리로 하는 모션 모방
motion mimicking은 결국 정책 롤아웃을 reference 모션에 맞추는 일입니다. 목표 자체는 단순하지만, “걸어라” 또는 “백플립하라”를 유도하는 보상을 설계하는 일은 어렵습니다. DiffMimic의 통찰은 이 작업이 해석적 기울기로는 놀랄 만큼 쉬워진다 는 것입니다.
각 iteration에서 상태를 첫 reference 상태로 초기화하고, 병렬 환경에서 최대 에피소드 길이까지 롤아웃한 뒤, 롤아웃 궤적과 reference 궤적 사이의 스텝별 L2 거리 를 계산합니다.
\mathcal{L} = \sum_{t=1}^{T} \lVert s_t - \hat s_t \rVert_2^2
\lVert s_t - \hat s_t \rVert_2^2 \triangleq \frac{1}{\lVert J \rVert}\sum_{j\in J} w_p(p^j - \hat p^j)^2 + w_r(q^j - \hat q^j)^2 + w_v(\dot p^j - \dot{\hat p}^j)^2 + w_a(\dot q^j - \dot{\hat q}^j)^2
위치·회전·선속도·각속도 오차의 가중합이며(회전은 quaternion보다 기울기 최적화에 유리한 6D 표현 사용), 가중치 w_p, w_r, w_v, w_a 는 크기를 대략 맞추도록 근사적으로만 튜닝하면 됩니다 — RL의 정교한 보상 설계와 대비됩니다.
DPS가 전이함수 \mathcal T (s_{t+1} = \mathcal T(s_t, a_t)) 역할을 하며 완전히 미분 가능하므로, 손실로부터 현재 행동 a_t 와 상태 s_t 양쪽으로 기울기를 직접 유도할 수 있습니다.
\frac{\partial \mathcal L}{\partial a_t} = \left(\frac{\partial \mathcal L}{\partial \mathcal T(s_t, a_t)}\right)\left(\frac{\partial \mathcal T(s_t, a_t)}{\partial a_t}\right), \qquad \frac{\partial \mathcal L}{\partial s_t} = \left(\frac{\partial \mathcal L}{\partial \mathcal T(s_t, a_t)}\right)\left(\frac{\partial \mathcal T(s_t, a_t)}{\partial s_t}\right)
이를 재귀적으로 적용해 전체 궤적에 걸쳐 기울기를 전파(BPTT)합니다. learned world model에 기대는 기존 방식과 달리, off-the-shelf DPS는 시스템의 실제 물리를 담아 더 신뢰할 수 있고 해석 가능한 기울기를 줍니다.
논문 그림 4
Demonstration Replay (핵심)
DPS 정책 학습엔 잘 알려진 세 가지 난제가 있습니다. (1) 긴 지평선에서의 기울기 폭발/소실, (2) local minima 로 인한 정체, (3) 노이즈/잘못된 기울기.
motion mimicking 작업의 높은 비볼록성(non-convexity)이 이를 심화시킵니다. 예컨대 Backflip 을 배울 때, 정책은 공중제비를 도는 더 동적인 동작을 탐색하는 대신 팔로 몸을 지탱 하는 안이한 자세에 빠지기 쉽습니다. 한편 BPTT를 짧게 자르는(예: 10-step truncation) 단순 절단은 궤적의 불연속을 만들어 더 나쁜 local optimal 로 이끕니다 — 동작들이 강하게 상호의존적(공중에서 어떻게 뒤집을지)이기 때문입니다.
기존 teacher forcing(Williams & Zipser 1989)은 롤아웃 상태를 reference로 무작위 교체(비율 \gamma, Bernoulli)합니다.
s_{t+1} = \begin{cases} \mathcal T(s_t, a_t), \ a_t \sim \pi_\theta(a|s_t) & \text{if } b=0,\ b\sim\text{Bernoulli}(\gamma) \\ \mathcal T(\hat s_t, a_t), \ a_t \sim \pi_\theta(a|\hat s_t) & \text{otherwise} \end{cases}
하지만 무작위 교체는 전역적으로는 나아도 프레임마다 충실히 모방 함을 보장하지 못합니다(일부 프레임에서 어색한 자세·큰 오차).
DiffMimic의 Demonstration Replay(demonstration-guided exploration) 는 reference에서 너무 멀어진 상태만 임계값 \epsilon 기준으로 교체합니다.
s_{t+1} = \begin{cases} \mathcal T(s_t, a_t), \ a_t \sim \pi_\theta(a|s_t) & \text{if } \lVert s_t - \hat s_t \rVert_2^2 < \epsilon \\ \mathcal T(\hat s_t, a_t), \ a_t \sim \pi_\theta(a|\hat s_t) & \text{otherwise} \end{cases}
교체 기준이 현재 롤아웃의 성능에 달려 있으므로, 교체 빈도가 학습 중 동적으로 자동 조정 됩니다. 경험적으로 이 방식이 더 매끄러운 기울기 추정을 주어 정책 학습을 크게 안정화합니다.
실험
단일 V100 GPU + Intel Xeon E5-2680에서 실험합니다. 주 지표는 평균 pose error(루트 관절 기준 상대 위치 오차, 미터 단위)이며 reference와 동기화를 위해 DTW를 적용합니다. 비교 대상은 DeepMimic(RL + 정교한 보상), Spacetime Bound(DeepMimic 하이퍼파라미터 탐색), AMP(Adversarial Motion Prior).
논문 그림 5
샘플 효율: 해석적 기울기의 힘 (Table 2)
20초를 넘어질 때까지 롤아웃하는 데 필요한 샘플 수(10^6 단위, DeepMimic 대비 변화율):
| Motion | DeepMimic | Spacetime Bound | Ours |
|---|---|---|---|
| Back-Flip | 31.18 | 41.20 (+32.1%) | 14.88 (-52.2%) |
| Cartwheel | 30.45 | 17.35 (-43.0%) | 13.92 (-54.2%) |
| Walk | 23.80 | 4.08 (-79.5%) | 7.92 (-66.7%) |
| Run | 19.31 | 4.11 (-78.7%) | 8.16 (-57.7%) |
| Jump | 25.65 | 41.63 (+77.8%) | 5.28 (-79.4%) |
| Dance | 24.59 | 10.00 (-59.3%) | 16.56 (-32.6%) |
DiffMimic은 DeepMimic 대비 일관되게 샘플 효율이 높습니다. DPS의 해석적 기울기로 적은 샘플로도 정책 기울기를 계산할 수 있는 반면, RL은 괜찮은 추정을 위해 큰 배치가 필요합니다. Spacetime Bound는 Jump 같은 단순 작업에서도 DeepMimic보다 많은 샘플이 필요한 등 불안정 한 데 비해, DiffMimic은 다양한 작업에서 안정적·일관적 입니다.
모션 품질 (Table 1)
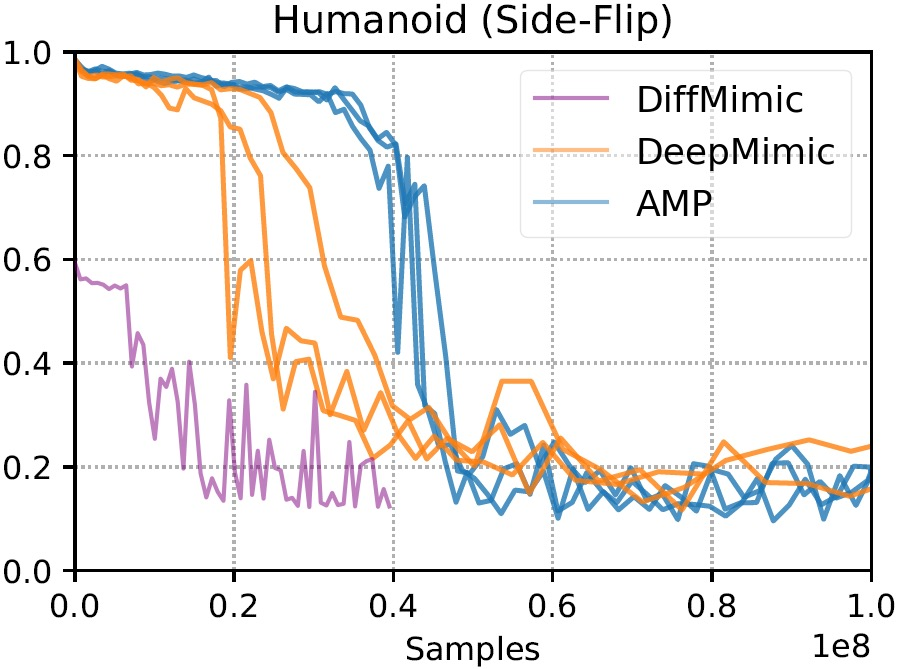
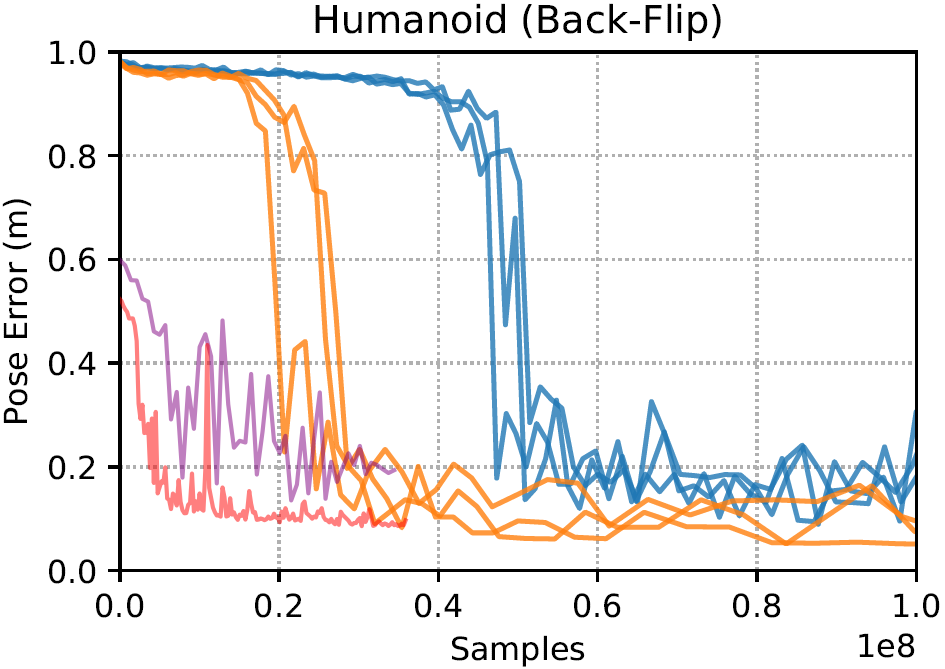
12개 모션의 평균 pose error에서 DiffMimic은 AMP를 일관되게 능가 하고 DeepMimic과 비슷한 수준입니다. 주목할 점: DiffMimic은 학습에서 4초 롤아웃 만 보고도 DeepMimic의 20초 cyclic 롤아웃 과 유사한 성능을 내, reference의 안정적·충실한 복원을 입증합니다.
| Motion | DeepMimic | AMP | Ours |
|---|---|---|---|
| Back-Flip | 0.076 | 0.150 | 0.097 |
| Jump | 0.033 | 0.083 | 0.025 |
| Run | 0.028 | 0.056 | 0.039 |
| Side-Flip | 0.244 | 0.124 | 0.069 |
| Walk | 0.018 | 0.030 | 0.017 |
시간 효율
해석적 기울기 계산이 추정 기울기보다 오래 걸리므로 wall-clock 비교가 공정합니다. GPU 병렬화를 쓰는 AMP와 비교했을 때, DiffMimic은 절반의 학습 시간 으로 비슷한 성능에 도달합니다. Backflip을 10분에 학습 하고, 3시간(14.88M 샘플) 에 cycle 가능합니다.
Ablation: Truncation 길이
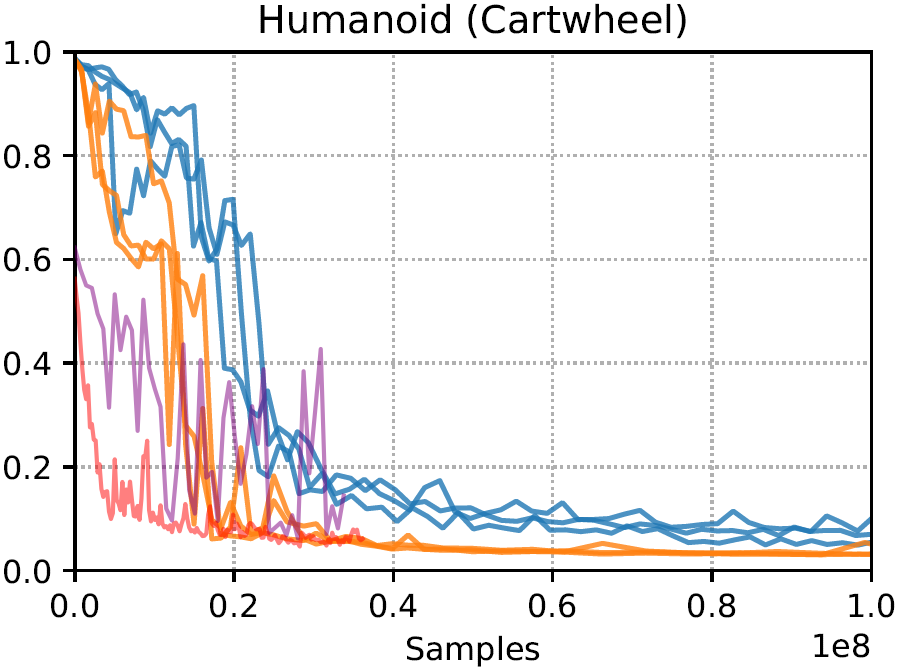
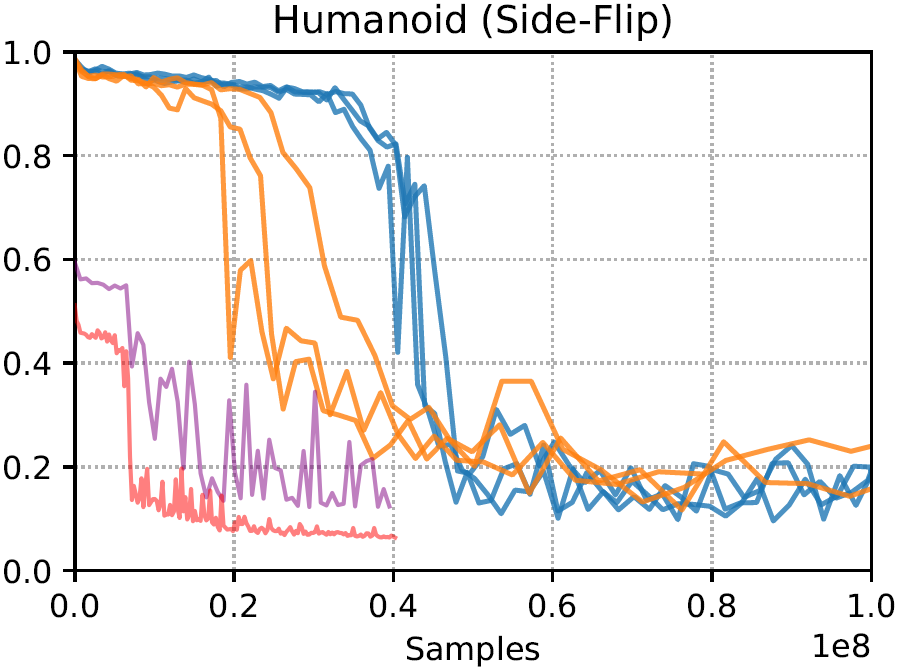
전체 궤적으로 기울기를 전파하면 길이 때문에 학습이 어렵지만, 단순히 10-step으로 자르면 궤적에 불연속이 생겨 오히려 더 나쁜 결과를 냅니다(Fig. 7a-b). 모션이 강하게 상호의존적이기 때문으로, 더 나은 전략(=Demonstration Replay)의 필요성을 보여줍니다.
Ablation: Demonstration Replay
세 변형을 비교합니다 — Full Horizon Gradient(교체 없음), Demo Replay (Random)(teacher forcing식 무작위 교체), Demo Replay (Threshold)(오차 기준 교체).
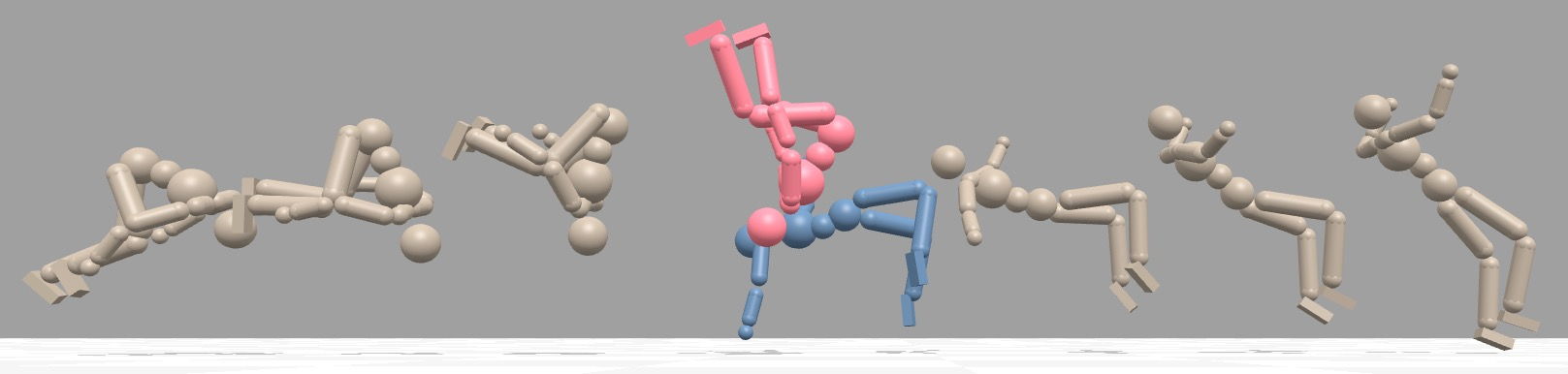
- Full Horizon Gradient 는 local minimum에 빠져, 백플립 대신 몸을 굽혀 팔로 지탱 하는 동작을 학습(Fig. 6b). 두 replay 변형은 모두 공중 백플립에 성공.
- Random vs Threshold: 평균 오차는 비슷하지만, Threshold가 프레임별 최대 오차가 낮아 더 충실하게 reference를 복원(Fig. 8). Random은 전체 평균은 줄여도 일부 프레임에서 큰 오차가 남습니다. 즉 단순히 평균 pose error를 줄이는 것만으로는 부족 하며, 현재 정책 성능에 기반한 세밀한 가이드(threshold) 가 필요합니다.
비판적 고찰
강점
- 문제 재정식화의 우아함. “복잡한 정책 학습 → 단순한 상태 매칭”이라는 재구성이, DPS의 미분 가능 dynamics와 만나 보상 설계 부담을 거의 제거하면서 샘플·시간 효율을 극적으로 높였습니다. Backflip 10분 학습은 강렬한 결과입니다.
- DPS 학습 난제의 실용적 해결. long-horizon 기울기 문제·local minima를 단순 truncation이 아닌 동적 Demonstration Replay 로 다룬 점이 핵심 기여입니다. Random vs Threshold의 차이를 프레임별 오차로 분석한 점도 설득력 있습니다.
- 공정하고 다각적인 비교. 샘플 효율(vs DeepMimic/Spacetime)과 시간 효율(vs AMP)을 분리해 측정하고, 12개 모션·8개 학습 곡선으로 폭넓게 검증했습니다.
- 벤치마크 공개. DPS 기반 motion mimicking의 표준 시뮬레이터를 공개해 후속 연구의 기반을 마련했습니다.
약점과 한계
- 저자가 인정한 핵심 한계: 평가한 작업이 상대적으로 짧고, 다른 물체와의 상호작용이 없습니다. 다물체·접촉이 복잡해지는 동적 시스템에서의 거동은 미해결로 남습니다.
- DPS/시뮬레이터 의존성. 성공은 Brax의 미분 가능성과 (부드러운 기울기를 위한) 관절 한계 완화 같은 시뮬 설정에 기댑니다. 더 stiff·불연속적인 실제 접촉이나 다른 엔진으로의 전이는 추가 검증이 필요합니다.
- DeepMimic 대비 품질은 동등 수준. 효율은 크게 앞서지만 pose error 품질 자체는 DeepMimic과 비슷하거나 일부 작업에서 약간 뒤져, “더 정확”하다기보다 “비슷한 품질을 훨씬 빠르게”에 가깝습니다.
- 임계값 \epsilon 의 튜닝. Demonstration Replay의 핵심인 \epsilon 설정이 작업마다 다를 수 있으며, 자동 조정은 빈도에 한정됩니다(추측: 임계값 자체의 민감도 분석은 제한적).
요약 및 결론
DiffMimic은 물리 기반 캐릭터의 motion mimicking을, RL의 보상 설계·낮은 샘플 효율 대신 미분 가능 물리(DPS) 기반 상태 매칭 으로 푼 연구입니다. 핵심은 (1) 궤적 거리의 해석적 기울기 를 DPS dynamics로 정책에 직접 전파하고, (2) reference 상태를 오차 기준으로 끼워 넣는 Demonstration Replay 로 long-horizon·local-minima를 안정화한 것입니다.
수치로 정리하면, DeepMimic 대비 샘플 효율 최대 −79%, AMP 대비 wall-clock 절반, Backflip 10분 학습·3시간 cycle(단일 V100)을 달성했고, 12개 모션에서 AMP를 일관되게 능가하며 DeepMimic과 동등한 품질을 보였습니다. Demonstration Replay의 threshold 방식이 random보다 프레임별로 충실히 모방함도 입증했습니다.
실무 관점에서 이 연구의 가치는 “보상 설계 없이, 미분 가능 물리의 해석적 기울기로 고난도 모션을 분 단위로 학습할 수 있음을 처음 보였다” 는 데 있습니다. 짧은 작업·물체 상호작용 부재라는 한계는 남지만, 상태 매칭 + Demonstration Replay 라는 틀은 미분 가능 애니메이션(예: differentiable clothes simulation)을 향한 유망한 출발점을 제시합니다.
논문 그림 6