flowchart LR
ENV["Environment<br/>(낙상 시뮬레이션)"] --> ACTOR
subgraph OBS["관측 분리"]
AO["Actor obs (비특권)<br/>base orientation,<br/>angular velocity,<br/>joint states + 노이즈"]
CO["Critic obs (특권)<br/>+ remaining time,<br/>foot contact flags,<br/>MDP obs, noiseless state"]
end
ACTOR["Actor (time-invariant)"] -->|joint target<br/>s·a + q̄| PD["PD controller"]
PD --> ENV
AO --> ACTOR
CO --> CRITIC["Critic (privileged)"]
ENV --> CRITIC
CRITIC -->|value| RL["PPO"]
RL --> ACTOR
📃Arm-assisted Fall Recovery
rl
recovery
quadruped
mobile-manipulation
Learning Arm-Assisted Fall Damage Reduction and Recovery for Legged Mobile Manipulators
🤖 본 논문은 legged mobile manipulator가 팔을 이용해 낙하 피해를 줄이고 복구를 보조하는 학습 기반 접근 방식과 이를 위한 비대칭 actor-critic 훈련 구조를 제안합니다. 🦾 시뮬레이션 결과, 제안된 정책은 기준선(baseline) 방법 대비 base contact impulse, peak joint internal force 및 base acceleration을 크게 줄였으며, 하드웨어 테스트에서는 98.9%의 높은 복구 성공률과 다리 토크 소비 감소를 보였습니다. ✅ 또한, 시간 불변(time-invariant) 액터 정책이 더 균일한 복구 동작을 유도하며, 제안된 방법이 로봇의 resting 및 self-righting과 같은 다른 작업에도 적용 가능함을 검증했습니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
이 논문은 Legged Mobile Manipulator의 낙상 피해 감소 및 회복을 위해 로봇 팔을 활용하는 학습 기반 접근 방식을 제시합니다. 기존 낙상 및 회복 전략은 비탄성 충돌 또는 정의된 방향으로의 낙상과 같은 제한적인 가정을 사용하는 경향이 있어 실시간 계산이 가능하도록 단순화되었습니다. 본 연구는 이러한 한계를 극복하고 로봇 팔을 사용하여 낙상 피해를 줄이고 로봇의 회복을 돕는 방법을 탐구합니다.
주요 목표는 다양한 초기 낙상 조건에서 로봇이 낙상으로 인한 손상을 줄이고 정해진 시간 내에 안정적인 스탠스 자세로 회복하도록 하는 단일 제어 정책을 훈련하는 것입니다. 이를 위해 저자들은 time-varying reward 함수를 포함하는 finite-horizon MDP(Markov Decision Process)로 문제를 정형화합니다.
핵심 방법론 (Core Methodology):
본 연구의 핵심은 Asymmetric Actor-Critic 훈련 구조와 time-varying reward 함수를 사용하는 데 있습니다.

논문 그림 1
- State Initialization and Rollout:
- 다양한 낙상 시나리오를 시뮬레이션하기 위해, 초기 기본 상태(base state)와 관절 상태(joint state)가 무작위로 초기화됩니다.
- 관절 액추에이터(joint actuator)는 각 에피소드에서 0.04초에서 1.50초 사이의 무작위 기간 동안 비활성화되어, 로봇이 이미 넘어지는 상황을 시뮬레이션합니다. 이는 컨트롤러가 늦게 낙상을 감지하는 상황에 대비한 것입니다.
- 이 초기 비활성화 기간이 끝나면, 학습된 정책(policy)이 로봇을 제어하여 낙상 피해를 줄이고 회복을 시작합니다. 에피소드는 MDP의 고정된 시간 지평(time horizon)이 끝날 때 종료됩니다.
- Asymmetric Actor-Critic:
- 강화 학습 알고리즘으로는 PPO(Proximal Policy Optimization)가 사용됩니다.
- Actor observation: 로봇의 기본 방향(base orientation), 기본 각속도(base angular velocity), 관절 상태(joint states)를 포함한 로봇 상태를 관찰합니다. 낙상 후 상태 추정의 불확실성 때문에 기본 선형 속도(base linear velocity)는 제외됩니다. 훈련 중에는 Actor의 관찰에 Gaussian noise가 추가되어 로봇의 상태 추정 노이즈에 대한 정책의 견고성을 높입니다. Actor의 정책은 time-invariant합니다.
- Critic observation: Actor의 noiseless 관찰과 함께 특권적인 관찰(privileged observations)에 접근할 수 있습니다. 이러한 privileged observations는 배포 시에는 사용할 수 없지만, 가치 함수(value function) 추정의 정확도를 높이는 데 기여합니다. 여기에는 에피소드의 남은 시간, 발 접촉 상태(foot contact states), 액추에이터 활성화 여부를 나타내는 이진 플래그(binary flag), 초기 비활성화 기간의 남은 시간 등이 포함됩니다. Critic은 time-variant한 가치 함수를 추정하여 time-varying reward 함수와 연동됩니다.
- Actions:
- 정책에 의해 생성된 관절 목표(joint target)는 \text{s}(\text{a} + \tilde{\text{q}})로 계산됩니다. 여기서 \text{s}는 액션 스케일링 팩터(action scaling factor), \text{a}는 정책의 액션 출력, \tilde{\text{q}}는 기본 관절 위치(default joint position)입니다.
- 계산된 관절 위치는 드라이브의 PD 컨트롤러(PD controller)의 위치 목표(position target)로 사용됩니다. 이는 ALMA 로봇의 경우 지정된 기본 각도 주변의 섭동(perturbation)을 출력하는 것이 좋은 초기 정책으로 작용하기 때문입니다.
- Reward Function:
- 낙상 피해 감소는 높은 접촉 충격량(contact impulse)과 신체 가속도(body acceleration)와 같은 원치 않는 측정값의 조합을 최소화하는 것으로 공식화됩니다.
- Time-variant task rewards (빨간색):
- Base height: 에피소드의 마지막 2초 동안 로봇의 몸통 높이가 0.5m 이상일 때 최대 보상을 받습니다.
- Joint position: ALMA의 기본 관절 위치(default joint position)에서 벗어나는 것에 페널티를 부여합니다.
- Base orientation: 로봇이 롤(roll) 및 피치(pitch) 각도를 줄여 기본 방향을 회복하는 것에 보상을 부여합니다.
- 이러한 task reward는 에피소드의 마지막 2초 동안에만 활성화됩니다.
- Time-invariant behavior rewards (파란색):
- Body collision: 신체 충돌에 대한 페널티로, 접촉력의 크기(\sum_{b \in B} \|\lambda_b[t]\|^2)에 비례합니다. 스케일은 -0.2입니다.
- Momentum change: 운동량 변화(\sum_{b \in B} \|m_b a_b[t]\|)에 대한 페널티로, 스케일은 -5e-3입니다.
- Body yank: 바디 저크(jerk, 힘의 변화율)(\sum_{b \in B} \|F_b[t] - F_b[t-1]\|^2)에 대한 페널티로, 스케일은 -5e-2입니다.
- Action rate: 액션 변화율(\sum (a[t] - a[t-1])^2)에 대한 페널티로, 스케일은 -3e-3입니다.
- Joint velocity: 관절 속도(\sum_j \dot{q}_j^2)에 대한 페널티로, 스케일은 -5e-4입니다.
- Torques: 토크(\sum_j \tau_j^2)에 대한 페널티로, 스케일은 -4e-7입니다.
- Acceleration: 관절 가속도(\sum_j \ddot{q}_j^2)에 대한 페널티로, 스케일은 -1e-8입니다.
- 이러한 behavior reward는 훈련 에피소드 전체에 걸쳐 활성화됩니다.
- 초기 비활성화 기간 동안에는 정책이 로봇의 관절 액션에 영향을 미치지 않으므로, task 및 behavior reward 모두 0으로 설정됩니다.
Sim-to-Real Transfer:
NVIDIA Isaac Gym을 사용하여 훈련 환경을 시뮬레이션하고 200Hz로 실행하며, 정책은 100Hz로 실행됩니다. Sim-to-Real 전송을 위해 다음과 같은 기술이 적용됩니다. * Actuator model: 다리 드라이브에 대한 액추에이터 모델이 시뮬레이터에 사용됩니다. 팔 드라이브의 경우, 마찰을 무작위화하고 토크 지연(torque delay)을 추가합니다. * Terrain randomization: 평평한 지형 대신 불균일한 지형(uneven terrain)이 사용되어 지면 접촉 법선 방향(ground contact normal direction)을 무작위화하고 더 큰 여유 공간을 장려합니다. * Observation noise: Actor 관찰에 Gaussian noise가 추가되어 로봇의 상태 추정 노이즈에 대한 정책의 견고성을 높입니다. * Robot randomization: 로봇의 기본 질량(base mass)이 무작위화되고, 로봇 바디의 지면 마찰 계수(friction coefficient)도 무작위화됩니다.
결과:
- 낙상 피해 감소: 제안된 정책은 기존 비상 컨트롤러(freezing, damping)와 비교하여 기본 접촉 충격량(base contact impulse), 피크 관절 내부 힘(peak joint internal forces), 기본 가속도(base acceleration)를 크게 줄입니다. 특히, 기본 충격량이 0.05Ns 미만인 경우에 정책이 접촉을 피하는 경우가 더 많아 손상 회피 능력을 보여줍니다.
- 낙상 회복: 팔을 사용한 정책은 초기 낙상 구성에서 98.9%의 성공률로 회복하며, 팔이 고정된(tugged-arm) 정책의 95.2%보다 우수합니다. 또한, 팔 사용은 평균 다리 토크 소비를 9.17% 감소시킵니다. 정책은 낙상에 따라 팔을 적응적으로 사용하여 낙상 충격을 완화하고 회복을 지원하는 전략을 학습합니다.
- Observation 구성 Ablation Study:
- Privileged critic의 중요성: Critic이 에피소드 진행 상황이나 privileged robot state observations를 관찰하지 못하면 task를 학습할 수 없음을 보여줍니다. time-variant한 가치 함수를 추정하는 privileged critic이 정책 업데이트의 분산을 크게 줄여 학습을 가능하게 합니다.
- Time-variant vs. time-invariant actor: Actor 관찰에 에피소드의 남은 시간을 포함하는 것은 에피소드 리턴에 큰 변화를 주지 않지만, 회복 행동을 다르게 만듭니다. Time-variant 정책은 작업 보상이 활성화되기 직전에만 빠르게 회복하는 경향이 있어 움직임이 시간적으로 균일하지 않고, 실패 시 회복 시도를 중단할 수 있습니다. 반면 time-invariant 정책은 시간적으로 일관된 행동을 보이며 항상 회복을 시도하여 배포에 더 적합하고 견고합니다.
- Asymmetric actor-critic vs. privileged policy: 제안된 비특권적(non-privileged) time-invariant actor와 privileged critic을 사용한 설정(configuration 2)은 privileged policy 설정(configuration 4)에 비해 평균 에피소드 리턴이 3.0% 감소하지만, 후자는 하드웨어 배포를 위해 추가적인 정책 증류(policy distillation) 과정이 필요합니다.
재현성 및 다른 작업으로의 적응:
제안된 훈련 파이프라인은 롤아웃 초기화 기간, 총 작업 기간, 관절 목표 위치 및 보상 스케일과 같은 상위 수준 설정을 수정하는 것만으로 다른 상태 전환 작업(state-transition tasks)에 쉽게 적용될 수 있음을 보여줍니다. “Resting”(임의의 스탠스 구성에서 지면에 착지) 및 “Self-righting”(넘어진 상태에서 기본 휴식 자세로 일어서기)과 같은 두 가지 추가 작업에 대한 정책도 훈련 및 하드웨어 검증을 통해 그 견고성을 입증합니다.
결론:
이 연구는 Legged Mobile Manipulator를 위한 time-invariant 제어 정책을 훈련하기 위한 Asymmetric Actor-Critic 방법을 제시합니다. 이 정책은 무작위 낙상 구성에서 time-based reward를 사용하여 시뮬레이션에서 훈련되며, 낙상 피해 감소 및 회복을 위해 팔을 적응적으로 사용하는 방법을 학습합니다. 제안된 컨트롤러는 낙상 중 피크 순간 충격량, 기본 가속도, 피크 관절 내부 힘 측면에서 기준 비상 컨트롤러보다 우수합니다. 또한, 팔을 사용한 회복 정책은 학습 기반의 팔이 고정된 회복 정책보다 회복 성공률과 다리 토크 소비 측면에서 뛰어난 성능을 보입니다. 이 정책은 ALMA 로봇 시뮬레이션 및 하드웨어에서 광범위하게 테스트되고 배포되었습니다. 향후 연구는 기능 이상과 같은 낙상으로 인한 잠재적 손상을 고려하여 정책을 확장하는 것을 목표로 합니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
다리 달린 모바일 매니퓰레이터는 조작 능력과 비정형 지형 주행을 겸비해 실용성이 높습니다. 하지만 응용에서는 센서나 엔드이펙터 같은 특수 페이로드 를 싣는 경우가 많고, 넘어지면 이 페이로드와 팔이 손상되기 쉽습니다. 따라서 낙상 중 손상 감소(fall damage reduction) 와 실패로부터의 복귀(recovery) 는 legged 로봇 분야의 남은 핵심 과제입니다. 둘 다 로봇이 지면과 의미 있게 접촉해야 하는 contact-rich 동작이라 잦은 접촉 전환을 다뤄야 합니다.
기존 접근의 한계는 분명합니다.
- 계획(planning) 기반 손상 감소: 고정/적응 접촉 시퀀스를 짜거나 ukemi(낙법) 같은 동작으로 충격을 흡수합니다. 하지만 비탄성·비미끄럼 충돌, 시상면(sagittal)/관상면(frontal)으로만 낙상 같은 제한적 가정에 기대고, 사지가 접촉 시퀀스를 추종할 만큼 충분히 민첩하다고 가정하는데 — 무거운 다리·제한된 관절 속도 를 가진 로봇에는 성립하지 않습니다. 작은 휴머노이드에서 쓰는 “팔 완전 신전(fully-stretched arm)” 자세는 ALMA(약 58kg)처럼 무거운 로봇에선 드라이브에 과한 충격 응력을 줘 바람직하지 않습니다.
- 계획 기반 복귀: 정확한 상태·접촉점 추정에 의존하는데, 낙상 후 상태 추정과 접촉이 불확실해 어렵습니다. 사전 정의 시퀀스·상태 전이·모델 단순화 같은 휴리스틱이 필요해 특정 로봇에 종속됩니다.
- RL 기반 복귀(기존): 휴리스틱을 줄일 수 있지만, 동작 보상(부드러움) 과 작업 보상(복귀 시간) 사이의 가중치를 맞추는 일이 취약하고 고된 튜닝 을 요구합니다.
이 논문의 한 줄 요약: 최소한의 단순화로, 팔을 능동적으로 활용 해 낙상 손상을 줄이고 복귀하는 단일 정책을, time-invariant 정책 + time-varying 보상 의 asymmetric actor-critic로 학습한다.
주요 기여는 세 가지입니다.
- 제안 정책과 현재 배포되는 비상 컨트롤러(드라이브 freezing/damping)의 정량 비교 — 낙상 중 base impulse·peak joint internal force·base acceleration 감소. 대칭(symmetric)·시간 가변(time-variant) 버전 대비 복귀 행동 개선의 ablation.
- 팔로 적응적으로 낙상을 멈추고, 정해진 시간 안에 stance 자세로 arm-assisted 복귀 하는 시뮬레이션 결과 + ALMA 하드웨어 검증.
- resting(임의 자세에서 휴지 자세로), self-righting(넘어진 상태에서 기본 자세로) 같은 다른 작업으로의 확장.
방법
문제를 유한 지평선(finite-horizon) MDP 로 정식화합니다. 로봇은 무작위 초기 낙상 자세에서 시작해, 에피소드 끝에서 손상 기준 최소화 + 직립 복귀 정도에 따라 보상을 받습니다. 핵심 도구는 asymmetric actor-critic 으로, critic만 시뮬레이터의 특권(privileged) 관측에 접근합니다.

논문 그림 2
상태 초기화와 롤아웃
모바일 매니퓰레이터는 보행·조작·throwing 등 작업마다 컨트롤러가 다르고 상태 분포(다리 접촉, base 자세 등)가 크게 달라, 모든 컨트롤러에 맞는 낙상 감지기를 만들기 어렵습니다. 그래서 작업 컨트롤러가 안전 점검을 수행해 낙상을 보고 하면 이 정책으로 전환하는 비상 컨트롤러 로 설계합니다.
다양한 낙상 초기 조건을 만들기 위해, 각 에피소드에서 초기 base·관절 상태를 무작위화하고 관절 액추에이터를 0.04~1.50초 동안 비활성화 해 로봇이 떨어지게 합니다(상한 1.50초는 늦은 낙상까지 허용). 이 초기화 구간이 끝나면 정책이 로봇을 제어하며, 에피소드는 MDP 시간 지평선 끝에서만 종료됩니다.
Asymmetric actor-critic
PPO를 사용하며 critic만 특권 관측을 봅니다.
- Actor 관측: base 자세, base 각속도, 관절 상태. base 선속도는 낙상 후 추정 불확실성이 커서 제외. 학습 시 가우시안 노이즈 추가(강건성).
- Critic 관측: 잡음 없는 actor 관측 + 특권 관측(에피소드 남은 시간, 발 접촉 상태, 액추에이터 활성 여부 binary flag 및 활성까지 남은 시간 등 MDP 관측).
핵심: 남은 시간을 critic만 관측 하므로 actor의 정책은 시간 불변(time-invariant) 으로 유지됩니다. 특권 critic이 time-varying 보상이 유도하는 진짜 value를 잘 추정해, 비특권 actor가 손상 감소·복귀 스킬을 안정적으로 배우게 합니다.
행동
정책이 내는 관절 목표는 s\,a + \bar q 입니다(s: action scaling, a: 정책 출력, \bar q: 기본 관절 위치). 이 관절 위치를 드라이브 PD 컨트롤러 의 목표로 씁니다(관절 차분 action 대신 절대 목표). 기본 관절 위치와 action scale은 측면 낙상 시 무작위 action이 로봇을 뒤집을 기회를 갖도록 골라, 초기 학습에서 self-righting 탐색을 돕습니다.
보상 함수 (핵심 설계)
낙상 손상 감소를 여러 바람직하지 않은 측정값(높은 contact impulse, body acceleration 등)의 조합 최소화 로 정식화하고, 에피소드 끝에서 stance 자세 근처로 일어선 데 대해 보상합니다. 보상은 두 종류로 나뉩니다.
논문 그림 3
(1) Time-variant 작업 보상 — 에피소드의 마지막 2.0초 에만 활성:
| 항목 | 의미 | scale |
|---|---|---|
| Base height | 토르소 높이가 높을수록 보상(≥0.5m에서 최대) | 600 |
| Stand joint position | ALMA 기본 관절 자세와의 편차 페널티 | 350 |
| Base orientation | roll·pitch 페널티로 base 자세 복귀 유도 | 120 |
(2) Time-invariant 행동 보상 — 에피소드 전 구간 활성(부드러운 낙상 유도):
| 항목 | scale |
|---|---|
| Body collision | -0.2 |
| Momentum change | -5\times10^{-2} |
| Body yank(힘 변화율) | -5\times10^{-2} |
| Action rate | -3\times10^{-3} |
| Joint velocity | -5\times10^{-4} |
| Torques | -4\times10^{-7} |
| Acceleration | -1\times10^{-8} |
직관: “언제 일어설지(작업)”는 시간에 묶고, “어떻게 부드럽게 움직일지(행동)”는 항상 적용 함으로써, 부드러움과 복귀 시간의 균형을 가중치 튜닝 없이 시간 구조로 분리합니다. 초기화 구간(액추에이터 비활성)에서는 두 보상 모두 0이라 관절 action에 영향을 주지 않습니다.
Sim-to-Real
NVIDIA Isaac Gym(200Hz 시뮬, 100Hz 정책)으로 학습하며 전이를 위해:
- 액추에이터 모델: 다리 드라이브엔 적용(SEA), 팔은 pseudo-direct drive로 투명성이 좋아 모델 대신 마찰 무작위화 + 토크 지연만 추가.
- 지형 무작위화: 평지 대신 울퉁불퉁한 지형으로 지면 법선 방향을 무작위화, 더 큰 clearance 유도.
- 관측 노이즈: actor 관측에 가우시안 노이즈.
- 로봇 무작위화: base 추가 질량 \sim \mathcal{U}(-5,5) kg, 지면 마찰 계수 무작위화.
실험
낙상 손상 감소
무작위 초기 낙상 자세·base 질량에 대해 2560회 롤아웃으로, 두 베이스라인 비상 컨트롤러(드라이브 freezing, damping)와 비교합니다. 지표는 peak base instantaneous impulse, mean/peak base acceleration, peak joint internal force.
논문 그림 5
- Base contact impulse(Fig. 5a): 제안 정책은 0.05Ns 초과 impulse 샘플 수가 적습니다. damping은 (직하·측면 낙상에 대응하는) 두 봉우리를, freezing은 높은 impulse 확률을 보여 평평한 꼬리를 가집니다.
- Base acceleration(Fig. 5b): 95th percentile base acceleration이 베이스라인보다 유의하게 낮음 — 최악 시나리오에서의 우위.
- Peak joint internal force(Fig. 6): damping 대비 소폭, freezing 대비 유의하게 감소. 즉 더 높은 peak internal force를 유발하지 않으면서 impulse·acceleration을 줄였습니다.

논문 그림 6
낙상 복귀
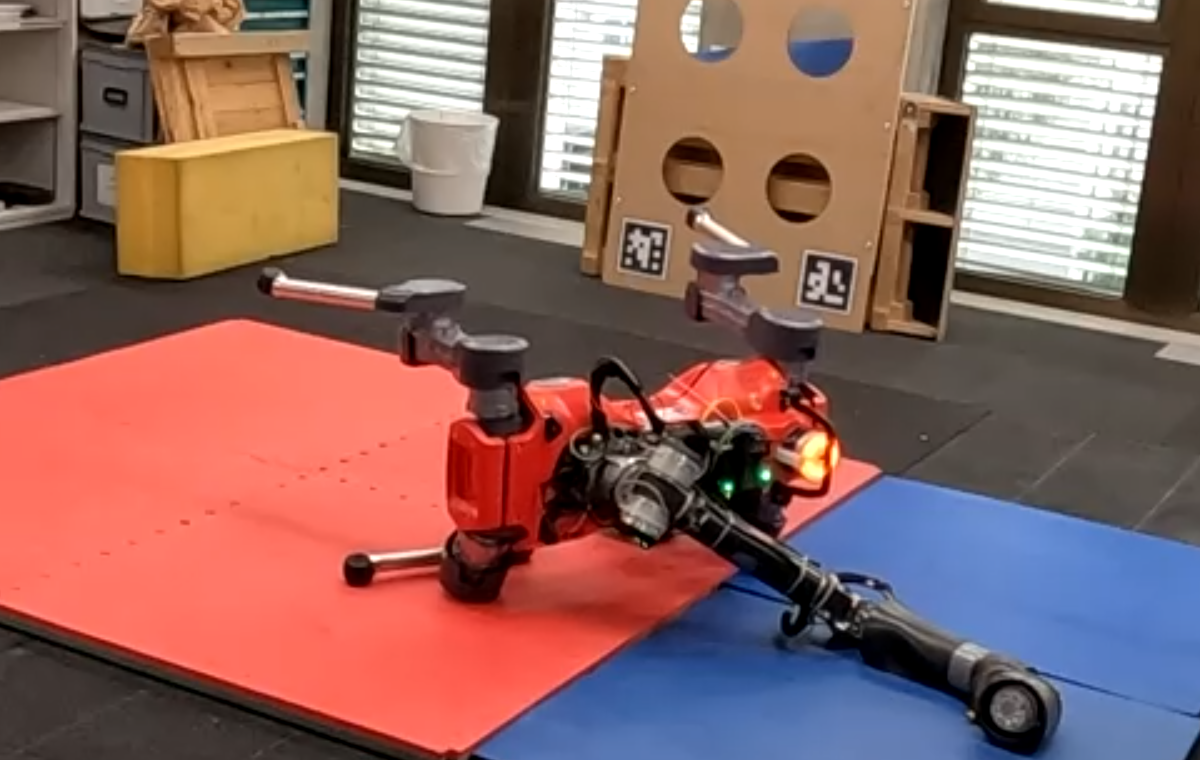
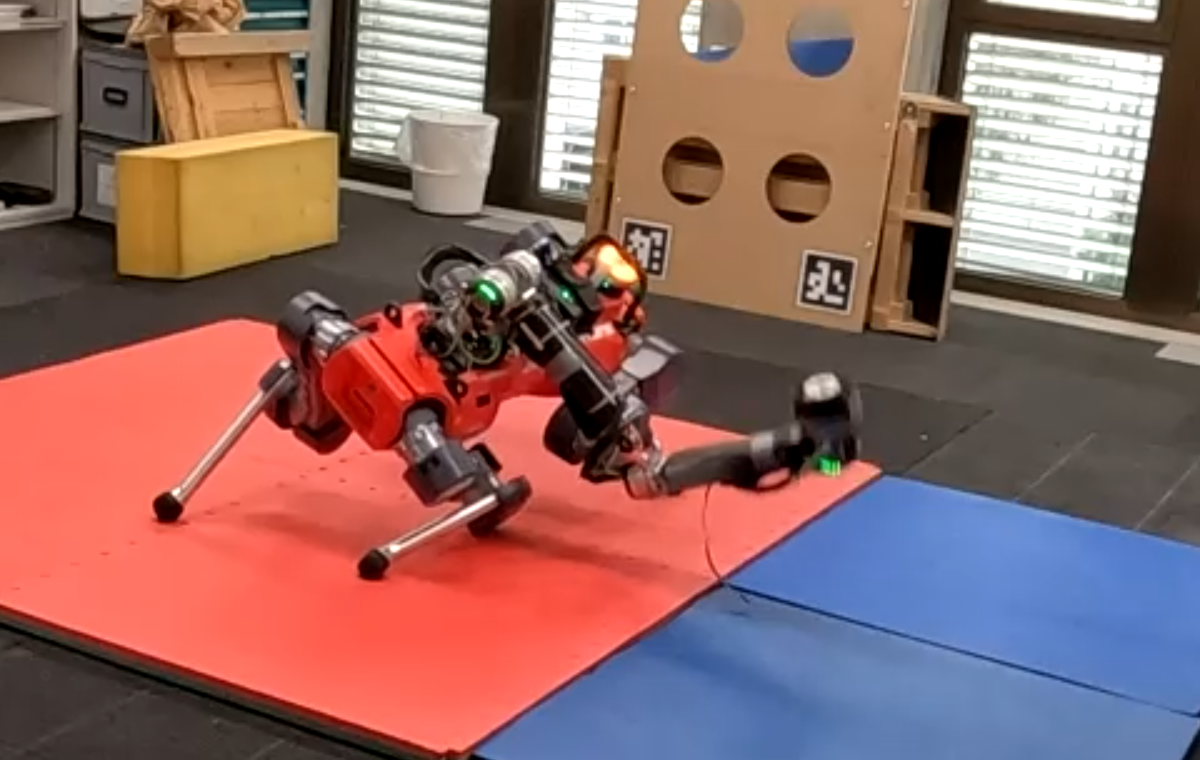
정책은 팔을 적응적으로 씁니다(Fig. 4 예시: 먼저 다리로 빠르게 일어서려다 실패→균형 상실→팔과 무릎으로 낙상 안정화→팔로 지면을 밀어 복귀→팔 회수). 성공 기준은 에피소드 끝에서 base height >0.5m, 최대 관절 속도 <0.01 rad/s.
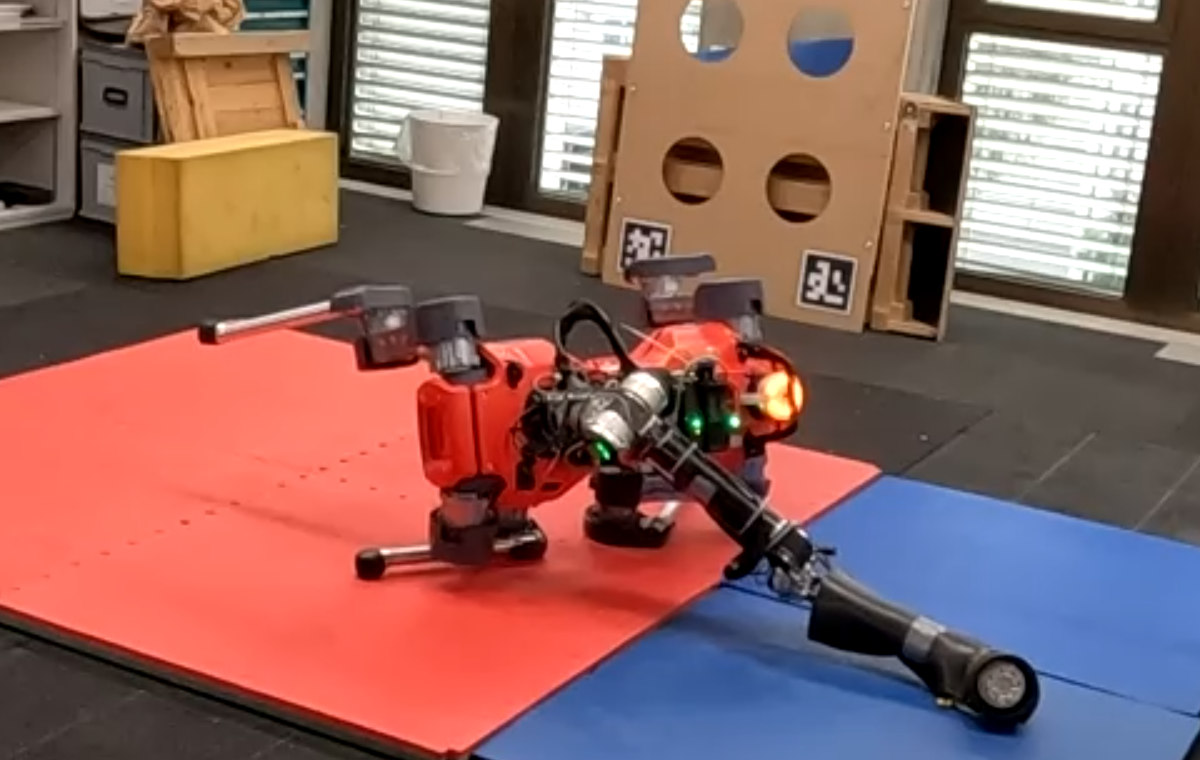
논문 그림 4
- Arm-assisted 복귀 성공률 98.9% vs arm-tugged(팔 고정) 95.2% (2560 에피소드, 동일 보상·MDP, 팔 사용 여부만 차이).
- 팔을 쓰면 다리 드라이브 평균 토크 소비 9.17% 감소(팔 도움 없이는 다리를 더 밀어야 함).
Ablation: 관측 구성 (Table II)
3개 시드, 20000 iteration 후 평균(episode return / value error):
| Actor obs | Critic obs | Episode return | Value error |
|---|---|---|---|
| o_s | o_s | -3.88 | 0.0902 |
| o_s (ours) | o_s, o_{priv}, o_{MDP} | 12.9 | 0.00379 |
| o_s, o_{eplen} | o_s, o_{priv}, o_{MDP} | 12.9 | 0.00411 |
| o_s, o_{priv}, o_{MDP} | o_s, o_{priv}, o_{MDP} | 13.3 | 0.00336 |
- 특권 critic 필수: 비특권 critic(구성 1)은 작업을 학습 못 함. 시간 불변 critic이 time-varying 보상의 진짜 value를 못 봐 정책 업데이트 분산이 큼.
- time-invariant vs time-variant actor: episode return은 비슷하나, time-variant actor는 “절반쯤 일어나 Hip 관절 한계에 기대 쉬다가 작업 보상 직전에 급히 재배치”하는 시간상 불균일한 동작을 학습 — 배포에 부적합. time-invariant는 일관되게 항상 복귀를 시도해 더 견고.
- asymmetric vs 특권 정책: 비특권 time-invariant actor + 특권 critic(구성 2)은 특권 정책(구성 4) 대비 평균 return 3.0% 감소에 그치면서, 추가 distillation 없이 바로 하드웨어 배포 가능.
재현성·확장
3배 키운 작업 보상으로도 복귀 height 분포가 유사 → 보상 스케일에 강건. 또한 초기화 구간·작업 시간·관절 목표·보상 스케일 같은 상위 설정만 바꿔 resting(임의 자세→휴지 자세), self-righting(넘어진 상태→기본 자세)로 손쉽게 확장하고 하드웨어로 검증했습니다.
비판적 고찰
강점
- 시간 구조로 보상 튜닝을 우회. “작업은 time-variant, 행동은 time-invariant”라는 분리가, 부드러움 vs 복귀 시간이라는 고질적 가중치 튜닝을 깔끔하게 풉니다. time-invariant 정책이 배포에 더 적합하다는 점도 ablation으로 보였습니다.
- 무거운 로봇에 맞는 현실적 가정 완화. 비탄성/평면 낙상 같은 제약을 버리고, 팔을 능동적으로 써서 58kg급 로봇의 낙상·복귀를 다룬 점이 실용적입니다.
- 정량 + 하드웨어 검증. 2560회 롤아웃의 정량 비교(impulse·acceleration·internal force)와 실제 ALMA 검증을 함께 제시해 설득력이 높습니다.
- 단일 정책의 통합성·확장성. 낙상 감소와 복귀를 한 정책에 담고, 동일 파이프라인으로 resting·self-righting까지 확장했습니다.
약점과 한계
- 저자가 인정한 핵심 한계: 학습 환경이 base가 지면에 닿는 상황을 회피 하도록 구성돼, 낙상으로 드라이브가 고장난(dysfunctional) 경우에는 적응하지 못합니다. 실제 심한 낙상의 손상 후 거동은 다룰 수 없습니다.
- 시뮬레이션 위주의 정량 평가. 손상 지표 비교는 대부분 시뮬레이션이며, 하드웨어 검증은 정성적 시연 중심입니다. 실세계 손상 감소의 정량 수치는 제한적입니다.
- peak joint internal force는 소폭 개선. damping 대비 internal force 감소는 marginal이라, 모든 손상 기준에서 압도적이진 않습니다.
- 비상 컨트롤러 전환 의존. 작업 컨트롤러가 낙상을 정확히 감지·보고해야 동작하는데, 낙상 감지 자체의 신뢰성은 이 논문의 범위 밖입니다.
요약 및 결론
이 논문은 무거운 legged mobile manipulator(ALMA)의 낙상 손상 감소 + 복귀 를, 팔을 능동적으로 활용 하는 단일 학습 정책으로 다룹니다. 핵심은 asymmetric actor-critic 으로 time-invariant 정책 을 time-varying 보상 으로 학습해, 동작 부드러움과 복귀 시간의 가중치 튜닝을 시간 구조로 분리한 것입니다.
수치로 정리하면, 무작위 낙상 자세의 98.9% 에서 복귀에 성공(팔 고정 95.2% 대비)했고, 팔 활용으로 다리 토크를 9.17% 절약했으며, 베이스라인(freezing/damping) 대비 base impulse·95th-percentile acceleration·peak joint internal force를 줄였습니다. 학습 정책은 실제 ALMA에서 낙상·복귀 모두 검증되었습니다.
실무 관점에서 이 연구의 가치는 “비싼 매니퓰레이터를 단 legged 로봇을, 넘어져도 손상을 줄이고 스스로 회복하게 만들어 현장 배포에 한 걸음 다가갔다” 는 데 있습니다. 고장난 드라이브 대응·실세계 정량 평가라는 한계는 남지만, 시간 가변 보상 + 비특권 시간 불변 정책 이라는 설계는 contact-rich 비상 행동 학습의 좋은 레시피를 제시합니다.