flowchart LR
A[Soft deformable skin with pins + white markers] -- "contact deforms skin, pins lever" --> B[Pin-OF misalignment]
B --> C[Light intensity drop in optical fibre]
C --> D[Plastic optical fibre bundle as artificial nerve]
D --> E[Single remote camera image]
E --> F[Segment OF positions, read greyscale intensity per OF]
F --> G[Interpolate into intensity surface plot]
G --> H[Image moments: position, width, Hu moments]
H --> I[GMM shape classification]
📃Nerves of Plastic
tactile
sensor
safety
Nerves of Plastic: A Transparent Approach To Distributed Tactile Sensing for Safer Robots
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
논문 그림 1
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
로봇이 사람과 같은 공간에서 함께 일하기 시작하면서, “로봇이 무언가에 닿았다”는 사실을 온몸 어디서나 알아채는 능력이 점점 더 중요해지고 있습니다. 그런데 지금까지의 시각 기반 촉각 센싱(vision-based tactile sensing) 연구는 대부분 손끝(fingertip) 에 고해상도 촉각을 심어 정밀 조작 능력을 끌어올리는 데 집중해 왔습니다. 대표적인 예가 이 논문의 모태인 TacTip 으로, 생체모사형(biomimetic) 시각 촉각 센서를 로봇 손끝에 통합해 높은 수준의 손재주(dexterity)를 달성했습니다.
하지만 사람의 촉각은 손끝에만 있지 않습니다. 손바닥, 손등, 팔 전체에 분산되어 있죠. 즉 분산 촉각(distributed tactile sensing) 이 필요합니다. 문제는 TacTip 같은 카메라 내장형 센서를 그대로 키우려 하면 벽에 부딪힌다는 점입니다. 카메라가 넓은 피부를 한눈에 담으려면 긴 초점 거리(focal distance) 나 추가 렌즈가 필요하고, 이는 센서를 두껍고 부피 크게 만들어 “온몸 피부”로의 확장을 가로막습니다.
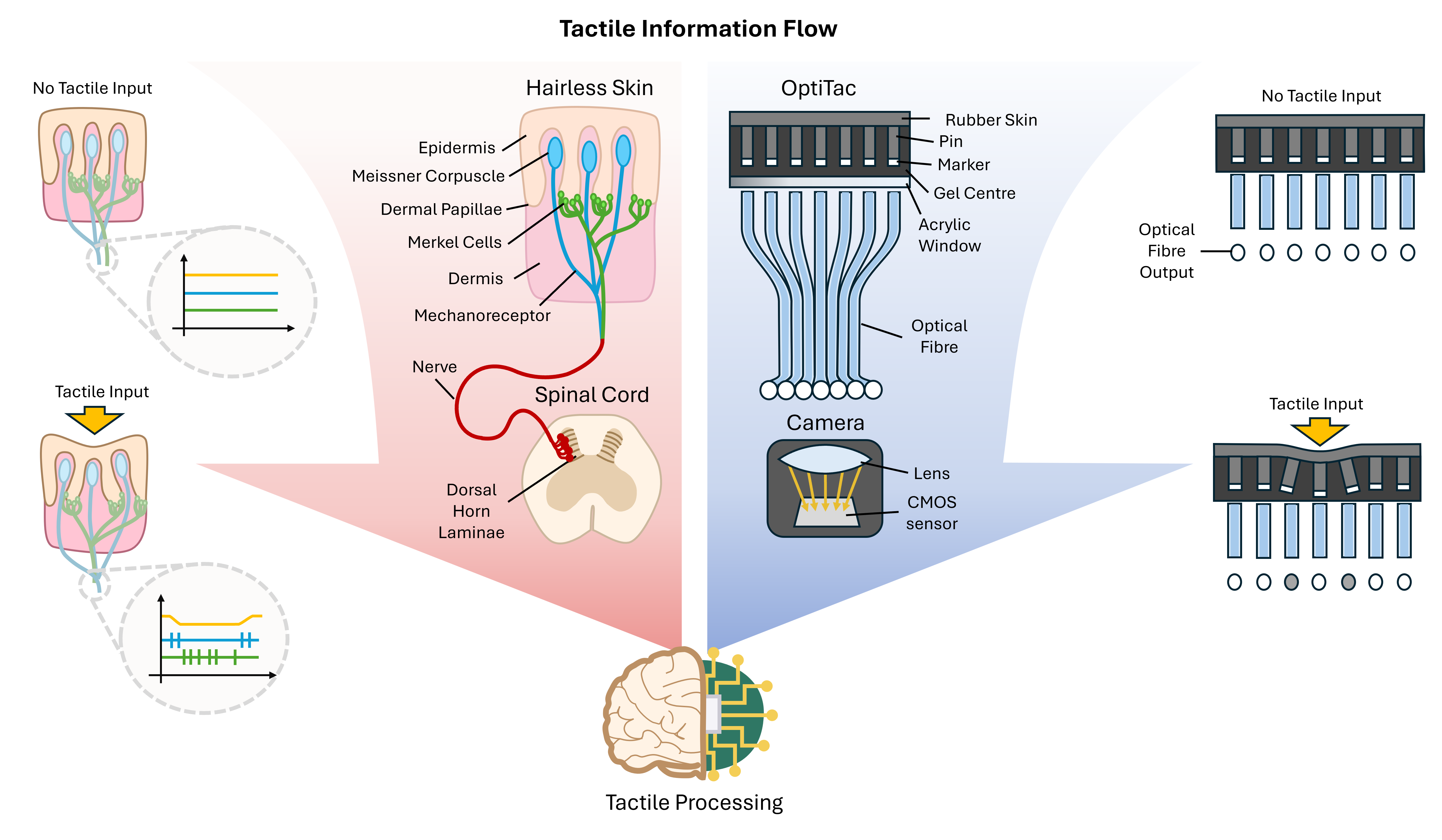
이 논문 “Nerves of Plastic: A Transparent Approach To Distributed Tactile Sensing for Safer Robots” 는 이 확장성 문제를 사람의 피부와 신경에서 영감을 받아 풀어냅니다. 핵심 발상은 제목 그대로입니다.
- Nerves(신경). 사람 피부의 기계수용기(mechanoreceptor)가 받은 자극은 신경(nerve) 을 타고 척수(spinal cord)의 특정 영역으로 전달되고, 이어서 뇌의 체성감각 피질로 전송됩니다. 즉 “감지하는 곳(피부)”과 “신호를 읽는 곳(뇌)”이 분리되어 있고, 그 사이를 신경이 잇습니다.
- of Plastic(플라스틱의). 이 논문은 그 “신경” 역할을 플라스틱 광섬유(plastic optical fibre, POF) 에 맡깁니다. 광섬유는 가늘고 빠르며, 촉각 정보를 멀리 떨어진 카메라까지 손실 없이 실어 나를 수 있는 “인공 신경”입니다.
저자들은 이 센서를 OptiTac 이라 부릅니다. 표준 TacTip을 기반으로 하되, 결정적 차이는 핀(pin)과 광섬유를 짝지어(pin-OF pairing) 촉각 정보를 피부에서 멀리 떨어진 단일 카메라로 전송한다는 점입니다. 이로써 감지(sensing) 모달리티와 검출(detection) 모달리티가 분리(decouple) 됩니다. 비유하자면, 피부(센서)는 그 자리에 두고 카메라(눈)는 멀찍이 떨어진 편안한 곳에 두되, 그 둘을 광섬유라는 “신경 다발”로 연결한 셈입니다.

논문 그림 2
“Transparent”의 두 가지 의미
제목의 “Transparent(투명한)”는 두 층위로 읽힙니다.
- 물리적 투명성. 광섬유라는 투명한 매질로 빛을 실어 정보를 전달합니다.
- 해석적 투명성. 최근 광섬유 기반 촉각 센서들은 접촉 파라미터를 예측하기 위해 딥러닝을 많이 쓰는데, 이는 “왜 그렇게 예측했는지” 알기 어려운 블랙박스(black-box) 입니다. 안전(safety)이 중요한 응용에서는 이런 비직관성이 부담입니다. OptiTac은 딥러닝 대신 이미지 모멘트(image moments) 라는 고전적·해석적(analytical) 기법을 써서, 접촉 위치·크기·모양을 투명하게(설명 가능하게) 산출합니다.
즉 이 논문에서 “투명함”은 단순히 광학적 성질만이 아니라, 안전을 위해 의사결정 과정 자체를 들여다볼 수 있게 만든다는 철학을 담고 있습니다.
방법
전체 구조 한눈에 보기
OptiTac은 TacTip의 핵심 메커니즘인 레버형 핀(levering pin) 구조를 그대로 물려받습니다. 포스터의 구조도에 따르면 센서는 위에서부터 부드러운 고무 피부(rubber skin) + 핀 + 마커(marker) + 젤 중심부(gel centre) + 아크릴 창(acrylic window) + LED 링 + 광섬유 마운트 어레이 + 광섬유 모듈 + 원격 카메라(렌즈 + CMOS 센서) 로 구성됩니다.
핵심 설계 원리: Pin-OF Pairing
OptiTac의 작동 원리는 우아할 만큼 단순합니다.
- 피부 표면의 각 핀(pin) 은 그에 대응하는 광섬유(OF) 와 일대일로 짝지어져 있습니다. 이웃한 짝(pair) 사이 간격은 1.5 mm, 핀과 광섬유의 지름은 각각 1 mm 입니다.
- 핀 끝에는 흰색 마커(white marker) 가 붙어 있습니다. 평상시(무접촉)에는 핀이 광섬유와 정렬되어 있어, 광섬유가 흰 마커를 정면으로 마주봅니다 → 밝은 빛(고강도) 이 광섬유를 통해 전송됩니다.
- 접촉이 일어나면 피부가 변형되고 핀이 지렛대처럼 기울어집니다(lever). 그러면 핀-광섬유 짝의 정렬이 어긋나고(misalignment), 고정된 광섬유는 흰 마커 대신 검은 피부·핀을 더 많이 바라보게 됩니다 → 전송되는 빛의 세기가 감소 합니다.
즉, 눈에 보이는 마커의 움직임(변위)을 빛의 세기 변화로 부호화(encoding) 하는 것입니다. 이렇게 부호화된 정보가 광섬유를 타고 피부에서 멀리 떨어진 카메라로 전달됩니다. 핵심은 광섬유가 이미지 안에서 항상 같은 자리에 고정(stationary) 되어 있다는 점입니다. 이 고정성 덕분에 블랙박스 딥러닝 없이도 단순한 영상 처리만으로 신호를 읽어낼 수 있습니다.
논문 그림 3
신호 처리 파이프라인
- 광섬유 위치 분할(segmentation). 광섬유 위치가 고정이므로, 첫 카메라 이미지 한 장을 분할해 모든 광섬유의 위치를 한 번만 찾아 둡니다.
- 강도 측정. 이후 프레임마다 각 광섬유 영역의 평균 그레이스케일 픽셀값(average greyscale value) 을 읽습니다.
- 보간(interpolation). 광섬유 위치들 위에서 강도값을 보간해, 출력 광강도의 고해상도 표면 플롯(surface plot) 을 만듭니다. 이 표면 플롯이 곧 현재 피부의 접촉 상태를 나타내는 “촉각 영상”입니다.
- 이미지 모멘트로 파라미터 추출. 이 표면 플롯에 이미지 모멘트를 적용해 접촉의 위치·너비·모양을 계산합니다.
이미지 모멘트의 직관
원시 모멘트(raw moments) 는 강도 분포를 일종의 “질량 분포”로 보고 그 무게중심을 찾는 도구입니다. 강도 I(x,y) 에 대해
m_{ij} = \sum_x \sum_y x^i\, y^j\, I(x,y)
로 정의되며, 접촉의 중심(centroid) 위치는 0차·1차 모멘트의 비로 구합니다.
\bar{x} = \frac{m_{10}}{m_{00}}, \qquad \bar{y} = \frac{m_{01}}{m_{00}}
직관적으로, m_{00} 는 전체 강도(질량)의 합, m_{10}, m_{01} 는 위치 가중 합이므로, 그 비는 강도 분포의 무게중심입니다 — 마치 접시 위에 흩어진 모래의 중심을 찾는 것과 같습니다.
중심 모멘트(central moments) 는 무게중심을 기준으로 분포가 얼마나 퍼져 있는지를 잽니다. 이 분포의 고유값(eigenvalue) \lambda 를 구하면 접촉 영역이 어느 방향으로 얼마나 넓은지를 알 수 있고, 저자들은 이를 반치전폭(FWHM, Full Width at Half Maximum) 으로 변환해 접촉 너비를 정의합니다.
\text{FWHM} = 2\sqrt{2 \ln h}\,\sqrt{\lambda}, \qquad h = 2
즉 강도 분포를 타원으로 근사했을 때 장축·단축의 길이로 접촉 폭을 읽는 것입니다.
Hu 모멘트(Hu moments). 모양 분류에는 1962년 제안된 Hu의 7개 불변 모멘트를 씁니다. Hu 모멘트는 중심 모멘트를 조합해 이동·회전·크기에 불변(invariant) 한 7개 값으로 도형의 형태를 요약합니다. 저자들은 이진화(binarised)한 표면 플롯에 Hu 모멘트를 적용하고, 로그 변환을 거친 뒤 가우시안 혼합 모델(GMM, Gaussian Mixture Model) 로 모양 클러스터를 분류합니다.
의사코드: 감지에서 모양 분류까지
# OptiTac analytical tactile pipeline
of_positions <- segment_optical_fibres(first_frame) # done once; OFs are fixed
loop per frame:
for each fibre f in of_positions:
intensity[f] <- mean_greyscale(frame, f)
surface <- interpolate(of_positions, intensity) # high-res intensity map
m00, m10, m01 <- raw_moments(surface)
centroid <- (m10/m00, m01/m00) # contact position
lambda <- eigenvalues(central_moments(surface))
width <- 2 * sqrt(2*ln(2)) * sqrt(lambda) # FWHM -> contact width
hu <- hu_moments(binarise(surface))[1:3] # first 3 Hu moments
shape <- GMM_classify(log_transform(hu))이 파이프라인의 미덕은 단순성과 설명 가능성입니다. 각 단계가 물리적·기하학적으로 의미가 분명해, 안전이 중요한 상황에서 “왜 이렇게 판단했는가”를 추적할 수 있습니다.
실험
저자들은 세 가지 핵심 능력 — 접촉 위치, 접촉 너비, 접촉 모양 — 을 정량 평가했습니다. 접촉 자극은 ABB IRB 120-3/0.6 로봇 팔에 인덴터(indentor)를 부착해 반복적으로 가했습니다.

논문 그림 4
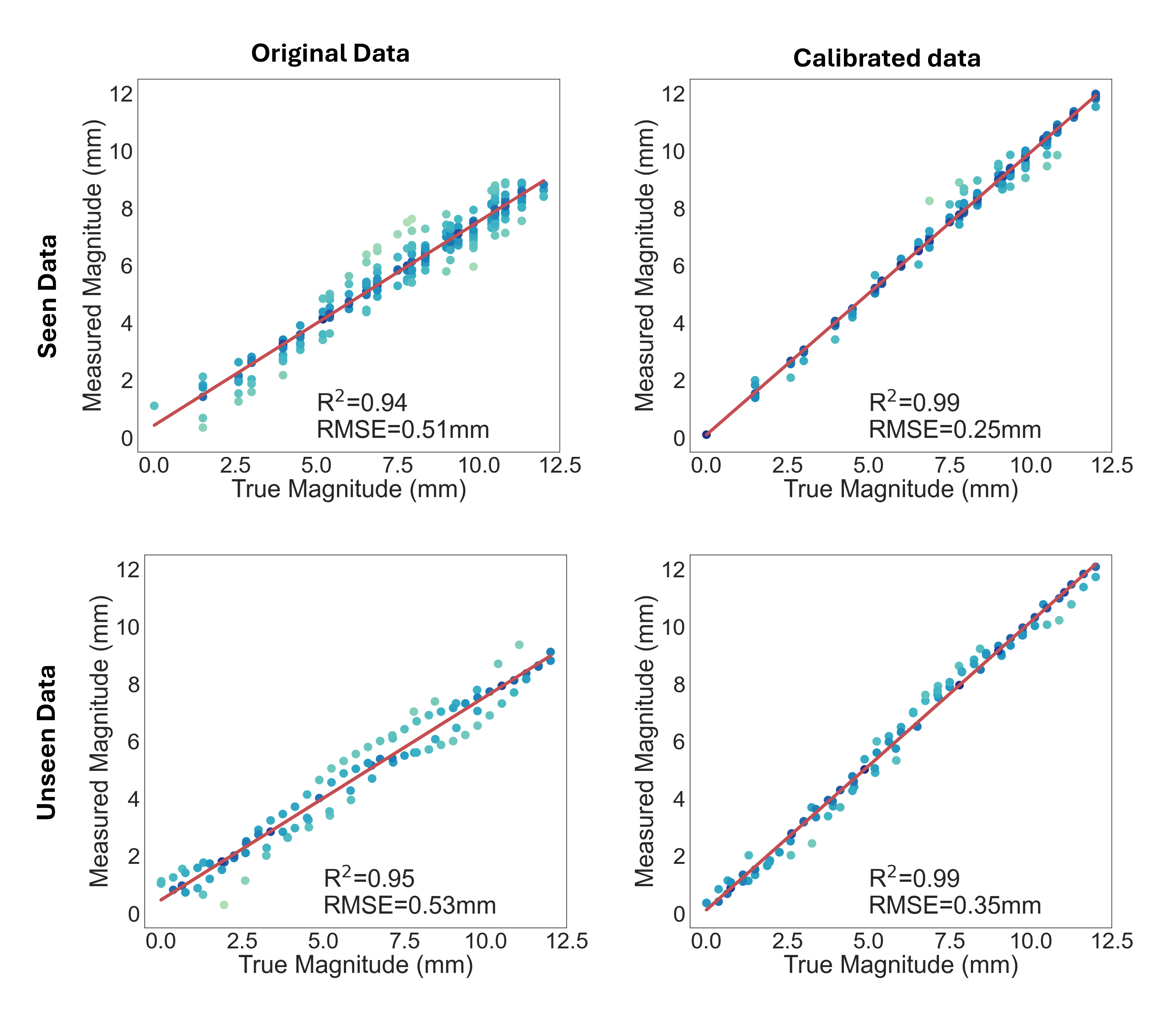
1. 접촉 위치 정확도
3 mm 깊이로 반복 압입(indentation)하며 위치를 측정했습니다. 초기 보정(calibration) 후, 학습에 쓰이지 않은(unseen) 보정된 접촉 위치를 실제 위치와 비교했습니다.
- 결정계수 R^2 = 0.99
- RMSE = 0.4 mm (x축, y축 모두)
여기서 중요한 해석: 측정 오차(0.4 mm)가 이웃한 핀-광섬유 짝 사이 간격(1.5 mm)보다 작습니다. 이는 센서가 물리적 센싱 요소 간격보다 더 미세한 위치를 분별할 수 있다는 뜻으로, 사람 피부의 핵심 특성인 초민감도(hyperacuity) 를 입증합니다. 비유하자면, 1.5 mm 간격의 격자점만 있는데도 그 사이를 0.4 mm 정밀도로 짚어내는 셈입니다 — 이는 보간 단계가 핀 사이의 정보를 효과적으로 메워주기 때문입니다.
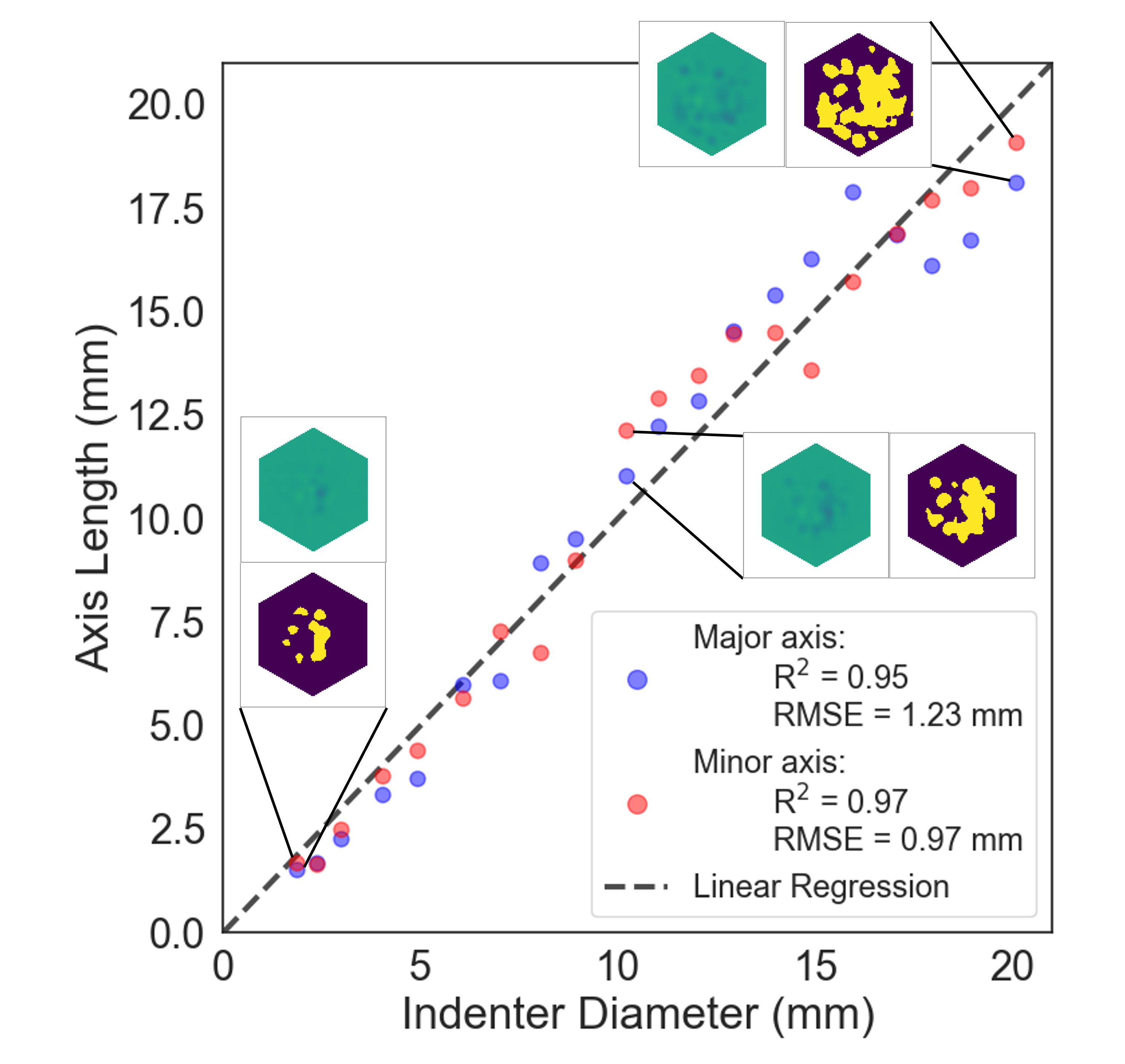
2. 접촉 너비 측정
지름 1.85 mm ~ 20.09 mm 범위의 3D 프린팅 원형 인덴터들로 다양한 너비의 접촉을 만들었습니다. 2차 보정은 (a) 원형 압입 시 장축·단축 값이 같아지도록, (b) 무접촉 시 너비가 0 mm가 되도록 맞췄습니다.
| 축 | R^2 | RMSE |
|---|---|---|
| 장축(major axis) | 0.95 | 1.2 mm |
| 단축(minor axis) | 0.97 | 1.0 mm |
여기서도 RMSE(1.0~1.2 mm)가 핀-광섬유 짝 간격(1.5 mm)보다 작아, 짝 단위 이하(sub-pair) 분해능으로 너비를 잰다는 점을 보여줍니다. 이는 보간과 이미지 모멘트의 조합이 효과적임을 뒷받침합니다.
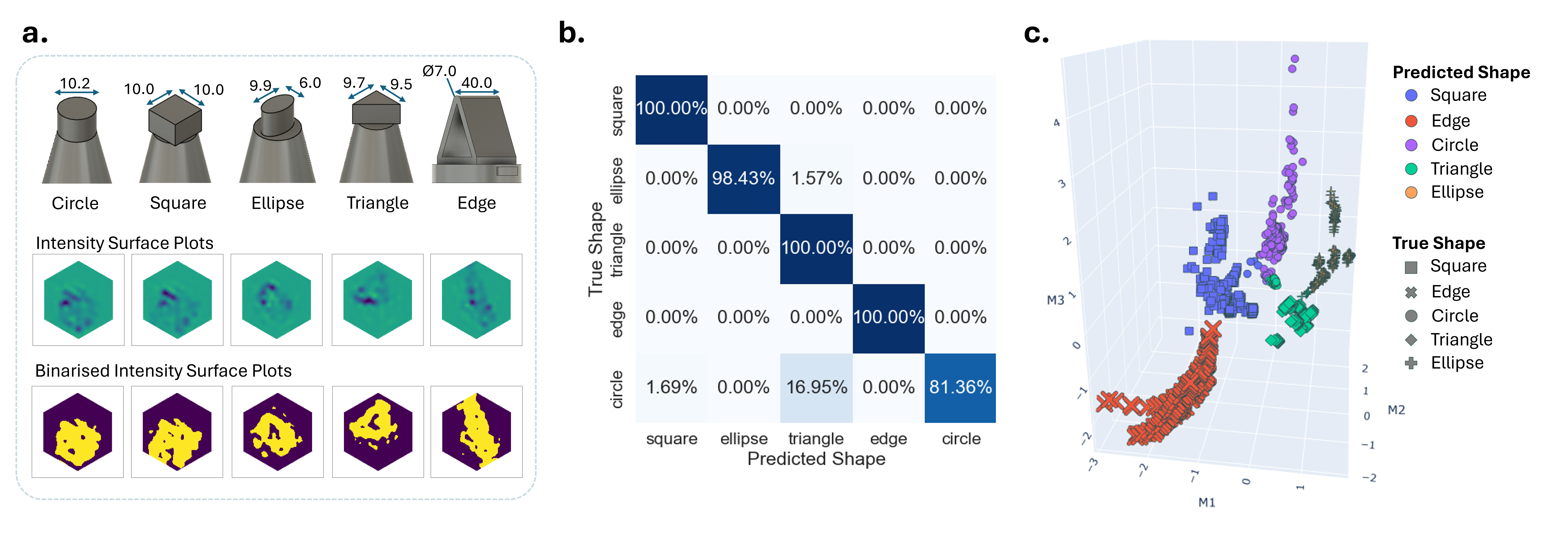
3. 접촉 모양 분류
5가지 3D 프린팅 도형(원, 사각형, 삼각형, 타원, 모서리(edge))을 서로 다른 위치·방향으로 압입했습니다(센싱 영역을 벗어나지 않도록 제약). 7개 Hu 모멘트의 여러 조합으로 GMM을 만들어 분류 성능을 비교한 결과:
- 처음 3개 Hu 모멘트 조합이 가장 좋은 성능을 보임.
- 평균 참양성(true positive) 분류율 = 96 %
혼동 행렬(confusion matrix)과 GMM 클러스터링 결과는, 선택된 Hu 모멘트가 도형별로 구분되는 특징을 잘 추출했고 클러스터가 시각적으로 잘 분리됨을 보여줍니다.
결과 요약 표
| 과제 | 지표 | 값 | 해석 |
|---|---|---|---|
| 위치 추정 | R^2 / RMSE | 0.99 / 0.4 mm | 짝 간격(1.5mm) 이하 → hyperacuity |
| 너비(장축) | R^2 / RMSE | 0.95 / 1.2 mm | sub-pair 분해능 |
| 너비(단축) | R^2 / RMSE | 0.97 / 1.0 mm | sub-pair 분해능 |
| 모양 분류 | true positive | 96 % (Hu 1~3) | 설명 가능한 분류 |
비판적 고찰
강점
- 확장성을 여는 구조적 발상. 핀-광섬유 짝이라는 단순한 원리로 센싱(피부)과 검출(카메라)을 분리함으로써, 카메라의 초점 거리·렌즈 제약에서 자유로워졌습니다. 광섬유 다발이 정보를 멀리 보내므로, 원리적으로 넓은 면적·분산 촉각으로 키우기 쉽습니다.
- 설명 가능한(투명한) 처리. 딥러닝 블랙박스 대신 이미지 모멘트라는 고전적·해석적 방법을 써서, 안전이 중요한 응용에서 판단 근거를 추적할 수 있습니다. 광섬유가 영상 내에서 고정이라는 점이 이 단순화를 가능케 한 핵심 트릭입니다.
- 정량적 우수성. 위치 RMSE 0.4 mm, 너비 RMSE 1.0~1.2 mm가 모두 물리적 짝 간격(1.5 mm)보다 작아 hyperacuity를 정량적으로 입증했고, 모양 분류 96%로 분류 가능성도 보였습니다.
- 생체모사 설계의 일관성. “피부-신경-척수-뇌”의 정보 흐름을 “피부-광섬유-카메라-영상처리”로 대응시킨 서사가 설계 전반을 일관되게 관통합니다.
논문 그림 5
약점·한계
- 워크숍 단편 규모의 검증. 위치·너비·모양 각각을 통제된 단일 접촉(single contact) 환경에서 평가했을 뿐, 다중 동시 접촉(multi-contact) 분리나 실제 분산 대면적 피부에서의 통합 검증은 아직 없습니다. “scalable / distributed”는 현재로선 설계 잠재력이며 실증은 후속 과제입니다.
- “Safer Robots”와 평가의 간극. 제목은 안전(safety)을 내세우지만, 본문 실험은 정적인 형상 인식(위치·너비·모양) 에 집중되어 있습니다. 안전 응용에서 핵심인 응답 지연(latency), 동적 접촉, 안전 제어 루프와의 통합에 대한 측정·실증은 제시되지 않았습니다. 안전성 주장은 아직 “원리적 기대” 수준입니다. (추측: 안전 제어기 통합은 향후 과제로 보임)
- 보정 의존성. 위치·너비 모두 보정(특히 너비는 2차 보정)을 거쳐야 하며, 흰 마커-광섬유 정렬에 기반한 강도 신호는 외광·노화·기계적 정렬 드리프트에 민감할 수 있습니다. (추측)
- 고정 광섬유의 양날. 광섬유가 고정이라 처리는 단순해지지만, 곡면·관절처럼 형상이 변하는 표면에 짝 정렬을 유지하며 까는 일은 기계적으로 까다로울 수 있습니다. (추측)
관련 연구와의 비교
| 접근 | 감지 원리 | 검출-센싱 분리 | 처리 방식 | 비고 |
|---|---|---|---|---|
| TacTip (모태) | 카메라가 내부 핀/마커 변위 추적 | 비분리(카메라 내장) | 영상 처리/학습 | 고해상도 손끝 중심, 확장 제약 |
| OF + 딥러닝 (예: Optofiber, multiscale ResNet) | 광섬유 광 변조 | 분리 | 딥러닝(블랙박스) | 전단·비틀림·압력 추정 |
| Image-moment 촉각 (Schmid, Gorges 등) | 다양한 촉각 어레이 | - | 이미지 모멘트(해석적) | 위치·방향·면적 추출 |
| OptiTac (본 논문) | 핀-광섬유 정렬 변화로 강도 변조 | 분리(원격 카메라) | 이미지 모멘트 + GMM(해석적) | TacTip의 확장성 한계를 분리로 돌파, 안전 지향 |
OptiTac의 자리매김은 명확합니다. TacTip의 생체모사 기계 구조는 유지하되, 광섬유로 센싱과 검출을 분리해 확장성을 확보하고, 광섬유 기반 센서들이 흔히 의존하는 딥러닝 대신 설명 가능한 이미지 모멘트를 선택함으로써 안전 응용에 적합한 방향을 제시한 작업입니다.
요약 및 결론
Nerves of Plastic 는 “손끝의 정밀함”에 머물던 시각 촉각 센싱을, 사람의 피부-신경 구조에서 영감을 받아 분산 촉각으로 확장하려는 시도입니다. 핵심은 핀-광섬유 짝(pin-OF pairing) 이라는 단순한 원리로, 핀 끝 흰 마커의 움직임을 광섬유가 실어 나르는 빛의 세기 변화로 부호화하고, 이를 멀리 떨어진 단일 카메라가 읽는 것입니다. 광섬유가 영상 내에서 고정이라는 성질 덕분에, 저자들은 블랙박스 딥러닝 대신 이미지 모멘트 + GMM 이라는 설명 가능한 해석적 파이프라인을 구축했습니다.
논문 그림 6
실험적으로 OptiTac은 위치 RMSE 0.4 mm(R^2=0.99), 너비 RMSE 1.0~1.2 mm(R^2=0.95/0.97), 모양 분류 96%(Hu 1~3 모멘트) 를 달성했고, 특히 위치·너비 오차가 모두 핀-광섬유 짝 간격(1.5 mm)보다 작아 사람 피부의 초민감도(hyperacuity) 를 정량적으로 보였습니다.
이 연구의 가치는 세 가지로 요약됩니다.
- 분리(decoupling)를 통한 확장성 — 센싱(피부)과 검출(카메라)을 광섬유로 분리해, 카메라 내장형 센서의 면적 확장 한계를 우회.
- 투명한(설명 가능한) 처리 — 안전이 중요한 맥락에서 딥러닝 블랙박스를 피하고 해석적 모멘트 기법을 채택.
- 생체모사의 일관성 — 피부-신경-뇌의 정보 흐름을 센서-광섬유-카메라-영상처리로 자연스럽게 대응.
남은 숙제는 다중 접촉 분리, 대면적 분산 피부 통합, 동적 응답·지연 측정, 그리고 실제 안전 제어 루프와의 결합입니다. 제목이 내건 “더 안전한 로봇”이라는 약속을 채우려면, 정적 형상 인식을 넘어 동적·통합 검증으로 나아가야 합니다.
Tip
한 줄 메아리(Ring). 손끝의 카메라를 피부에서 떼어내 “광섬유 신경”으로 잇자, 촉각이 비로소 온몸으로 퍼질 길이 열렸다 — 그것도 블랙박스가 아닌, 들여다볼 수 있는 단순한 수식으로.