flowchart LR
A[ShadowTac sensor<br/>180 markers, 100 Hz] --> B[2D lateral<br/>displacement field]
B --> C[Displacement<br/>magnitude map]
C --> D[L2 normalization]
D --> E[Encoder<br/>width 256]
E --> F[1D latent z1]
F --> G[Linear classifier<br/>dry vs slippery]
F --> H[Decoder<br/>reconstruct map]
G --> I[Pre-lift friction<br/>decision]
📃One-Touch Friction Estimation
tactile
friction
grasp
One-touch friction estimation at the onset of grasp
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
로봇이 젖은 유리잔이나 무른 과일을 안정적으로 집으려면, 들어 올리기 전에 접촉면이 얼마나 미끄러운지를 알아야 합니다. 마찰을 과대평가하면 실제 마찰 원뿔(friction cone)이 가정보다 좁아서 힘 폐쇄(force closure)가 성립하지 않고, 들어 올리는 순간 물체가 미끄러져 떨어집니다. 그런데도 대부분의 파지 계획기는 마찰을 “측정 가능한 양”이 아니라 고정된 사전값(prior)으로 취급해 왔습니다.
촉각 센서를 쓰면 접촉 상호작용을 직접 관찰할 수 있어 마찰 정보를 얻을 길이 열립니다. 가장 흔한 접근은 미끄러짐(slip) 검출 입니다. 즉 접촉 경계에서 실제로 미끄러지는 사건을 감지해 그립 힘을 보정합니다. 하지만 이 방식은 본질적으로 사후 반응적입니다. 물체가 이미 움직이기 시작한 뒤에야 신호가 나오고, 보정에 쓸 수 있는 시간 창이 너무 좁아 추락을 막지 못할 수 있습니다.
이 논문(Giuseppe Vitrani, Laurence Willemet, Michaël Wiertlewski, TU Delft Cognitive Robotics)이 택한 더 안전한 길은, 접선 방향 하중을 가하기 전, 처음 수직으로 누르는 그 순간(initial press)에 마찰을 추정 하는 것입니다. 이것이 바로 사람이 하는 일입니다. 인간은 손가락이 닿은 지 100 ms 안에 그립 힘 조절을 시작하는데, 이는 순수한 수직 누름만으로도 마찰을 지각한다는 것을 시사합니다. 선행 연구는 그 비밀을 손가락 피부의 방사형 팽창(radial expansion) 에서 찾았습니다. 피부가 바깥으로 퍼지려는 움직임을 마찰이 붙잡아 두고, 그 저항이 첫 접촉 순간의 공간적 전단(shear) 분포에 새겨진다는 것입니다. 센서의 공간 해상도가 충분하다면 이 전단 패턴을 디코딩해 마찰을 읽을 수 있습니다.

논문 그림 1
이전의 로봇 구현(임베디드 센싱 요소, 기울어진 돌기 등)도 “들어 올리기 전 마찰 추정”을 시도했지만, 평평한 표면에만 국한 되어 있었습니다. 이 논문의 핵심 기여는 이 능력을 임의의 접촉 기하(arbitrary geometry) 로 확장한 것입니다. 고밀도 광학 촉각 센서와 학습된 압축 표현(compact representation)을 결합해, 단 한 번의 수직 누름으로 접촉 곡률·형상에 무관하게 미끄러움을 분류합니다.
핵심 기여를 정리하면 다음과 같습니다.
- 단일 수직 누름(single normal press) 만으로 미끄러움을 분류 — 미끄러짐 사건을 일으킬 필요 없음.
- 기하 불변(geometry-invariant) 추정 — 7가지 인덴터 형상에서 동작하고, 학습에 쓰지 않은 물체로 일반화.
- 1차원 잠재 공간(1D latent space) 에서 마찰이 선형으로 분리되는 매우 간결한 표현을 학습 (지도 오토인코더, SAE).
- 들어 올리기 전(pre-lift) 단계에서 마찰을 식별해 선제적 그립 조정 가능.
방법
센서와 데이터 수집
촉각 데이터는 ShadowTac 센서로 수집했습니다. 이 센서는 부드러운 실리콘 막에 박힌 180개의 표면 마커 를 소형 카메라로 추적합니다. 100 Hz로 각 프레임을 잡으면 2D 측면 변위장(lateral displacement field)이 얻어지고, 여기서 변위 크기 맵(displacement magnitude map) 을 계산합니다. 이는 전단 강도(shear intensity)의 공간 분포를 인코딩한 스칼라 이미지입니다.

논문 PDF — p.1
데이터 수집은 모터 구동 스테이지가 7가지 인덴터 를 센서에 1 mm/s로 눌러 만듭니다.
| 인덴터 | 사양 |
|---|---|
| 구(sphere) ×2 | 지름 20 mm, 40 mm |
| 원기둥(cylinder) ×2 | 지름 20 mm, 40 mm |
| 평면(flat) ×1 | 평평한 표면 |
| 기울어진 평면 ×2 | 2.5°, 5° 경사 |
압입 깊이는 형상에 따라 약 2-3 mm. 각 형상을 건조(dry) 와 윤활(lubricated) 두 조건에서 각각 두 번 반복했습니다.
- 건조: \mu \approx 1.8 - 2.0
- 윤활: \mu \approx 0.05 - 0.1
수직력은 2-7 N 범위. 데이터는 60° 간격 6회 회전 + 랜덤 지터로 증강해 10,920개의 균형 잡힌 샘플 을 만들었습니다.
여기서 영리한 설계가 등장합니다. 힘 수준에 따라 학습/검증을 분리 한 것입니다. 마찰 단서가 더 또렷한 높은 수직력(Fn ∈ [5, 7] N) 으로 학습하고, 단서가 약한 낮은 수직력(Fn ∈ [2, 5) N) 으로 검증합니다. 이렇게 하면 모델이 단순히 “큰 변형이면 어떤 마찰”이라고 외우는 것이 아니라, 약한 신호에서도 마찰을 일반화하도록 강제됩니다.
마찰 추정 모델: 지도 오토인코더(SAE)
핵심 모델은 지도 오토인코더(Supervised Autoencoder, SAE) 입니다. 일반 오토인코더는 입력을 압축했다가 복원만 하지만, 여기서는 잠재 공간이 마찰을 분류하도록 동시에 학습됩니다. 즉 두 가지 일을 한꺼번에 합니다.
- 정규화된 입력 맵을 복원(reconstruction).
- 잠재 공간에서 마찰을 분류(classification).
학습 손실은 두 항의 가중합입니다.
\mathcal{L}_{\text{total}} \;=\; \mathcal{L}_{\text{rec}} \;+\; \lambda \, \mathcal{L}_{\text{class}}
- \mathcal{L}_{\text{rec}}: 입력 변위 크기 맵을 얼마나 잘 복원하는가 (표현이 의미 있는 구조를 보존하도록).
- \mathcal{L}_{\text{class}}: 잠재 좌표에서 마찰 클래스를 얼마나 잘 가르는가.
- \lambda: 분류 가중치. 복원과 분류 사이의 균형을 조절.
직관적으로 보면, 복원 항은 잠재 표현이 “전단 패턴의 모양”을 충실히 담게 하고, 분류 항은 그중에서도 마찰을 가르는 축 을 잠재 공간에 정렬시킵니다. 두 압력이 함께 작용해 잠재 공간이 깔끔하게 구조화됩니다.
논문 PDF — p.2
분류기는 잠재 공간 위의 선형 분류기(linear classifier) 입니다. 선형 분류기를 쓴다는 것은 곧 “잠재 공간에서 마찰 클러스터가 직선 하나로 갈릴 만큼 선형 분리 가능해야 한다”는 강한 제약을 모델에 거는 것입니다. 이 제약 덕분에 표현이 단순하고 해석 가능해집니다.
입력 정규화: 왜 L2 정규화인가
입력은 변위 크기 맵을 \ell_2-정규화(L2 normalization) 한 것입니다. 정규화는 전체 변형의 절대 크기(누르는 힘이 크면 다 같이 커지는 성분)를 제거하고, 변형의 공간적 “패턴/모양” 만 남기는 역할을 합니다. 마찰은 변형의 절대 크기가 아니라 분포 형태 에 담겨 있기 때문에, 이 정규화가 기하·하중에 대한 불변성을 끌어내는 핵심 장치입니다. 논문은 마찰이 만드는 차이를 이렇게 설명합니다.
- 윤활(미끄러움): 대칭적이고 크기가 큰 고리(symmetric, high-magnitude ring) 형태로 전단이 퍼짐 — 피부가 자유롭게 바깥으로 미끄러짐.
- 건조(높은 마찰): 크기가 작고 비대칭적인 장(lower-magnitude, asymmetric field) — 막이 국소적으로 표면에 “닻을 내려(local membrane anchoring)” 붙잡힘.
그리고 이 패턴 차이는 곡률과 작은 접촉 편심(eccentricity)에 의해 기계적으로 증폭 됩니다. 둥근 인덴터일수록 마찰에 따른 전단 분포 차이가 더 또렷해진다는 뜻입니다.
하이퍼파라미터
검증 정확도를 기준으로 고른 최종 구성은 다음과 같습니다. 잠재 차원은 1차원으로 충분 했고, 차원을 늘려도 개선은 미미했습니다.
| 하이퍼파라미터 | 값 |
|---|---|
| 잠재 차원 d_z | 1 |
| 인코더 폭(encoder width) | 256 |
| 분류 가중치 \lambda | 0.3 |
| 학습률 | 10^{-3} |
학습 자체는 1분 이내 에 끝납니다. 표현이 매우 가볍다는 것을 보여줍니다.
실험
잠재 구조 (latent structure)
검증 세트를 1차원 잠재 좌표 z_1 에 투영하면, 건조(dry) 와 미끄러움(slippery) 두 군집이 선형 결정 경계(linear decision boundary) 로 갈립니다. 그런데 같은 데이터를 형상별로 묶어 보면 분포가 대부분 겹칩니다. 이것이 이 논문의 가장 우아한 결과입니다. 모델이 형상 고유 정보를 버리고(discard shape-specific information) 마찰에 의존하는 전단 변형 구조만 남겼다 는 증거이기 때문입니다.
이 하나의 잠재 좌표만으로 모든 형상·힘 범위에서 검증 정확도 0.896 (89.6%) 을 달성했습니다.
논문 PDF — p.3
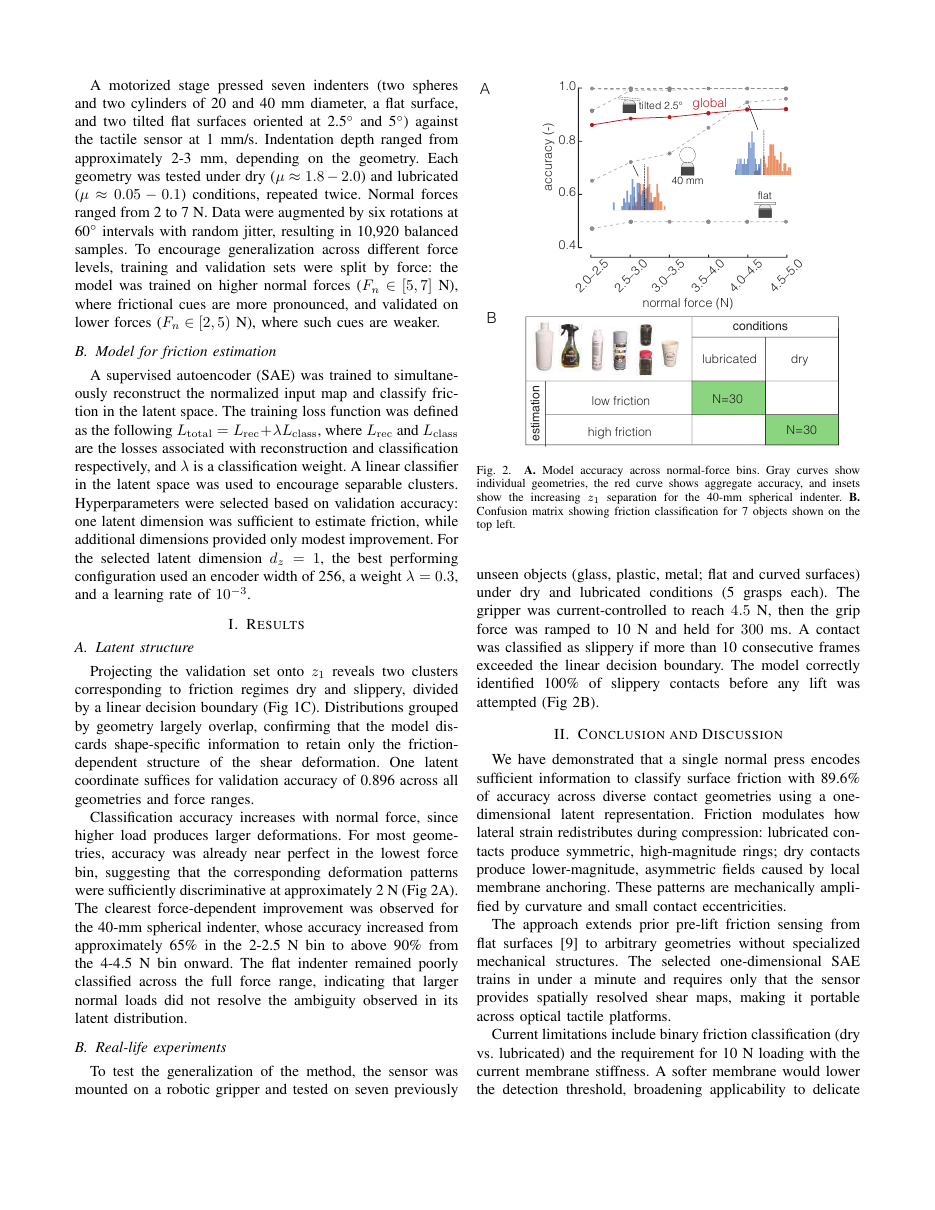
수직력에 따른 정확도
분류 정확도는 수직력이 커질수록 향상 됩니다. 누르는 힘이 클수록 변형이 커져 마찰 단서가 또렷해지기 때문입니다.
- 대부분의 형상은 가장 낮은 힘 구간(약 2 N)에서도 이미 거의 완벽한 정확도 — 즉 낮은 하중에서도 변형 패턴이 충분히 분별적.
- 가장 뚜렷한 힘 의존 개선을 보인 것은 40 mm 구형 인덴터: 2-2.5 N 구간에서 약 65% 였던 정확도가 4-4.5 N 구간부터 90% 이상 으로 상승. (논문 Fig. 2A의 인셋이 z_1 분리가 힘에 따라 커지는 것을 보여줌)
- 평면(flat) 인덴터 는 전 힘 범위에서 분류가 잘 안 됨. 수직력을 더 키워도 잠재 분포의 모호함이 해소되지 않았음. 이는 마찰 단서가 곡률·편심으로 증폭된다는 본문 주장과 정합합니다. 평면은 그런 증폭 요소가 없으니까요.
실세계 실험 (real-life)
일반화를 검증하기 위해 센서를 로봇 그리퍼에 장착 하고, 학습에 쓰지 않은 7개 물체 (유리·플라스틱·금속, 평면 및 곡면)를 건조·윤활 조건에서 각각 5회씩 잡아 보았습니다.
프로토콜은 다음과 같습니다.
- 그리퍼를 전류 제어로 4.5 N 까지 접촉.
- 그립 힘을 10 N 까지 램프업 하여 300 ms 유지.
- 10 프레임 이상 연속으로 선형 결정 경계를 넘으면 “미끄러움(slippery)”으로 분류.
결과: 들어 올리기 시도 전에 미끄러운 접촉의 100% 를 정확히 식별 했습니다(Fig. 2B의 혼동 행렬). 즉 학습 단계에서 본 적 없는 재질·형상의 물체에서도, 단 한 번의 누름으로 미끄러움을 사전 검출하는 데 성공했습니다.
결과 요약 표
| 항목 | 결과 |
|---|---|
| 전체 검증 정확도 (모든 형상·힘) | 0.896 |
| 잠재 차원 | 1 (선형 분리) |
| 40 mm 구: 2-2.5 N → 4-4.5 N+ | ~65% → >90% |
| 평면 인덴터 | 전 범위 분류 불량 |
| 실세계 미지 물체(7개, dry/lub) | 미끄러움 100% 사전 식별 |
| 학습 시간 | < 1분 |
| 데이터 | 10,920 샘플 (7형상 × dry/lub × 증강) |
비판적 고찰
강점
- 안전성: 거시적 미끄러짐(macroscopic slip)을 일으키지 않고 마찰을 추정 → 연약·미끄러운 물체에 이상적. “한 번 떨어뜨려 봐야 안다”는 딜레마를 제거.
- 기하 불변성: 이 논문의 핵심 진전. 선행 pre-lift 마찰 센싱이 평면에 갇혀 있던 것을, 임의 곡률·기울기 표면 으로 확장. 형상별 잠재 분포가 겹친다는 결과가 이를 정량적으로 뒷받침.
- 극단적 간결성: 1차원 잠재 공간 + 선형 분류기. 학습 1분 이내. 별도 기계 구조 불필요, 전단 맵만 주면 어떤 광학 촉각 센서에도 이식 가능. 89.6%라는 정확도를 이 정도 단순함으로 얻은 점이 인상적.
- 물리적 해석 가능성: 잠재 축이 “대칭 고리(윤활) vs 비대칭 앵커링(건조)”이라는 명확한 변형 형태에 대응. 블랙박스가 아님.
- 생체모방 정당성: 인간이 100 ms 내에 수직 누름만으로 마찰을 지각한다는 신경생리(Johansson & Westling)와, 첫 접촉 변형이 마찰을 코딩한다는 PNAS 2021 연구에 근거.
약점·한계
- 이진 분류에 그침: 현재는 건조 vs 윤활의 2-클래스 분류 만 수행. \mu \approx 1.8-2.0 과 \mu \approx 0.05-0.1 처럼 극단적으로 벌어진 두 조건이라 분리가 쉬웠을 수 있습니다. 실제 물체는 그 사이 연속적인 마찰 스펙트럼을 가지며, 다단계/연속(regression) 추정은 미래 과제로 남아 있습니다.
- 높은 하중 요구: 현재 막 강성으로는 신뢰할 만한 신호를 위해 10 N 부하 가 필요합니다. 이는 정작 보호하려는 연약 물체(달걀, 무른 과일)에는 과할 수 있습니다. 저자도 더 부드러운 막이 검출 임계를 낮출 것이라고 인정합니다.
- 평면에서의 약점: 평면 인덴터는 전 힘 범위에서 분류가 불량합니다. 마찰 단서가 곡률·편심에 의존해 증폭되므로, 곡률이 없는 매끈한 평면 접촉(예: 평평한 유리판 정면 파지)에서는 성능 저하 가능성이 있습니다.
- 검증 규모: 실세계 물체 7개 × 각 5회 그립으로, 워크숍 단편 논문 수준의 검증입니다. 다양한 재질·온습도·센서 마모에 대한 강건성은 추가 검증이 필요합니다.
- 개루프(open-loop) 단계: 현재는 들어 올리기 전 식별까지만 보였고, 추정 마찰을 실제 그립 힘 제어 루프에 닫는(closed-loop) 통합은 향후 과제로 명시되어 있습니다.
관련 연구와의 비교
- 미끄러짐 검출 계열 (Chen et al., IEEE Sensors 2018 리뷰): 물체가 이미 움직인 뒤 반응 → 시간 창이 좁고 추락 위험. 본 논문은 들어 올리기 전 에 추정해 이 한계를 피함.
- 평면 한정 pre-lift 센싱 (Okatani et al. 압전 빔, Khamis et al. 광학 3D 힘, Maeno et al. 탄성 핑거): 마찰을 누름만으로 추정하지만 평평한 표면에 국한. 본 논문은 임의 기하로 확장한 것이 차별점.
- 생체/물리 기반 (Willemet et al., PNAS 2021): 첫 접촉의 방사형 변형이 마찰 지각을 형성한다는 발견. 본 논문은 그 원리를 ShadowTac(Vitrani et al., ICRA 2025)이라는 고밀도 광학 센서와 학습 표현으로 로봇에 구현.
요약 및 결론
이 연구는 로봇 파지의 오랜 순환 고리 — “마찰을 알려면 미끄러뜨려 봐야 한다” — 를 끊으려는 시도이며, 기존 시도가 평면에 갇혀 있던 것을 임의의 접촉 기하 로 확장한 첫 사례입니다. 핵심은 첫 접촉 순간의 공간적 전단(displacement magnitude) 패턴 에 마찰이 새겨진다는 물리, 그리고 이를 지도 오토인코더의 1차원 잠재 공간 에 압축해 형상에 무관하게 선형 분리하는 학습 설계에 있습니다.
방법론적으로는 \ell_2-정규화로 변형의 절대 크기를 떼어내고 “모양”만 남긴 뒤, \mathcal{L}_{\text{total}} = \mathcal{L}_{\text{rec}} + \lambda \mathcal{L}_{\text{class}} (\lambda=0.3, d_z=1, 인코더 폭 256, lr 10^{-3}) 로 복원과 분류를 동시에 학습합니다. 결과적으로 잠재 좌표 z_1 하나가 마찰의 지문 역할을 하며, 모든 형상·힘에서 89.6% 검증 정확도, 실세계 미지 물체 7종에서 미끄러움 100% 사전 식별 을 달성했습니다. 윤활은 대칭적 고리, 건조는 비대칭 앵커링이라는 변형 형태 차이가 잠재 축에 명확히 대응한다는 점도 해석 가능성을 높입니다.
로봇공학 실무자 관점에서 이 접근의 매력은 속도·안전성·이식성 의 삼박자입니다. 학습 1분, 추가 기계 구조 불필요, 전단 맵만 주면 어떤 광학 촉각 센서에도 이식 가능. 다만 (1) 이진 분류에서 다단계 마찰 회귀로의 확장, (2) 10 N이라는 높은 부하 요구를 낮추는 더 부드러운 막, (3) 평면 접촉에서의 모호성, (4) 추정 마찰을 그립 힘 제어 루프에 닫는 통합 — 이 네 가지가 실배치 전 풀어야 할 숙제입니다. 저자들이 말하듯, 이 연구는 마찰을 “첫 접촉 순간에 기계적으로 관측 가능한 양”으로 자리매김 시킨, 기하 불변 pre-lift 마찰 추정의 첫걸음입니다.
한 줄 요약: “미끄러뜨려 보지 말고, 첫 누름의 전단 패턴을 읽어라.” — 형상을 지우고 마찰만 남기는 1차원 잠재 축이 곧 마찰의 지문이다.

논문 포스터
참고 문헌
- Vitrani, Willemet, Wiertlewski, One-touch friction estimation at the onset of grasp, ICRA 2026 ViTac Workshop. (본 리뷰의 원문)
- Vitrani, Pasquale, Wiertlewski, ShadowTac: Dense measurement of shear and normal deformation of a tactile membrane from colored shadows, ICRA 2025. (사용된 센서)
- Willemet, Kanzari, Monnoyer, Birznieks, Wiertlewski, Initial contact shapes the perception of friction, PNAS 2021. (물리적 근거)
- Johansson & Westling, Roles of glabrous skin receptors … in automatic control of precision grip, Exp. Brain Res. 1984. (100 ms 그립 조절 근거)
- Chen, Khamis, Birznieks, Lepora, Redmond, Tactile sensors for friction estimation and incipient slip detection: A review, IEEE Sensors J. 2018. (미끄러짐 검출 계열)
- Maeno, Kawamura, Cheng, Friction estimation by pressing an elastic finger-shaped sensor against a surface, IEEE T-RA 2004. (평면 한정 선행 pre-lift 추정)