flowchart LR
A["Normal force applied<br/>contact fully stuck"] --> B["Tangential force grows<br/>periphery starts to slip"]
B --> C["Slip zone grows inward<br/>= incipient slip"]
C --> D["Slip reaches center<br/>= gross slip (drop!)"]
C -. "detect here &<br/>raise grip force" .-> E["Stable grasp<br/>maintained"]
style C fill:#ffe2b0,stroke:#d97706
style D fill:#fca5a5,stroke:#b91c1c
style E fill:#bbf7d0,stroke:#16a34a
📃Incipient Slip Grip Force
tactile
slip
grasp
Grip force regulation via low-dimensional incipient slip estimation
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
문제: “얼마나 세게 쥐어야 안 미끄러질까?”
물건을 집어 드는 동작은 너무 흔해서 어렵다는 사실을 잊기 쉽다. 하지만 로봇에게는 만만치 않은 문제다. 파지력(grip force)이 너무 약하면 물체가 미끄러져 떨어지고, 너무 강하면 종이컵 같은 연약한 물체가 찌그러지거나 부서진다. 정답은 그 사이 어딘가, 즉 미끄러지기 직전의 임계점에 작은 안전 여유(safety margin)를 더한 지점이다.
문제는 이 임계점이 마찰계수에 의존하는데, 마찰계수는 물체의 재질·표면 상태·습기·접촉 형상에 따라 매번 달라진다는 점이다. 즉 “절대적인 마찰력”을 미리 알 수 없다. 사람은 미끄러운 유리컵과 까슬까슬한 머그컵을 집을 때 무의식적으로 다른 힘을 쓴다. 어떻게 마찰을 측정하지도 않았는데 적절한 힘을 알까?
이 논문(TU Delft 인지로봇 그룹의 ViTac 워크숍 work-in-progress)은 그 답을, 고해상도 촉각 센서가 주는 막(membrane) 변형장을 단 2개의 지배적 모드(dominant mode)로 압축해 마찰·형상에 무관한 안전 여유를 실시간(약 20 Hz)으로 추정하고, 그것을 파지력 제어 루프에 직결하는 방식으로 제시한다.
핵심 통찰: 마찰을 재지 말고, “미끄러질 조짐”을 읽어라
이 연구의 핵심 아이디어는 직관적이다. 마찰계수를 직접 추정하려 하지 말고, 접촉면이 “곧 미끄러지려 한다”는 신호(incipient slip, 초기 미끄럼)를 읽어내자는 것이다.
비유하자면, 절벽 끝까지의 거리를 정확히 자로 재는 대신, 발밑의 흙이 부스러지기 시작하는 느낌으로 “한 발 더 가면 위험하다”를 감지하는 것과 같다. 절벽의 절대 위치(마찰계수)를 몰라도, 부스러짐의 패턴(접촉면 변형)만 읽으면 안전 여유를 직접 알 수 있다.
저자들은 사람의 체성감각계가 원시 촉각 신호를 통째로 처리하지 않고 소수의 공간 기저(spatial basis)로 압축한다는 신경과학적 증거(참고문헌 [6], 동일 그룹의 Efficient tactile encoding of object slippage, Sci. Rep. 2022)에서 영감을 받았다. “사람이 그렇게 한다면, 로봇 촉각 변형장도 저차원으로 눌러 담아 미끄럼 정보만 분리할 수 있지 않을까?”가 출발점이다.
논문 그림 1
초기 미끄럼(incipient slip)이란
부드러운 막(또는 손가락)이 표면에 눌린 채 접선 방향 힘을 받으면, 접촉면 전체가 한꺼번에 미끄러지지 않는다. 대신 접촉 영역의 바깥쪽(가장자리)부터 미세하게 미끄러지기 시작하고, 중심부는 여전히 붙어 있는(stuck) 상태가 된다. 접선력이 커질수록 미끄럼 영역(slip zone)이 안쪽으로 점점 자라 들어가고, 마침내 중심까지 도달하면 물체 전체가 미끄러진다(gross slip).
이 중간 상태가 바로 incipient slip이며, 핵심은 물체가 실제로 거시적으로 움직이기 전에 막 변형 패턴만으로 감지할 수 있다는 점이다.
방법
전체 파이프라인은 “센서 변형장 → 저차원 사영(projection) → 해석적 안전 여유 모델 → 파지력 제어”의 단일 폐루프다.

논문 그림 2
flowchart TB
SENS["ShadowTac sensor<br/>~200 locations<br/>normal un, tangential ut"] --> SVD["SVD on Xn and Xt<br/>find dominant modes"]
SVD --> PROJ["Project onto 1st PCs<br/>zn = un . Xn<br/>zt = ut . Xt"]
PROJ --> MODEL["Analytical model<br/>Gamma(zt, zn)<br/>MAE 0.11, R2 0.77"]
MODEL --> CTRL["Outer PID loop ~20 Hz<br/>hold Gamma_set = 0.7"]
CTRL --> INNER["Inner PID loop 100 kHz<br/>Teensy motor command"]
INNER --> SENS
style SVD fill:#dbeafe,stroke:#2563eb
style MODEL fill:#fef9c3,stroke:#ca8a00
style CTRL fill:#bbf7d0,stroke:#16a34a
1) 센서와 데이터셋: ShadowTac
입력 신호는 ShadowTac(저자 그룹이 ICRA 2025에서 발표한 vision-based tactile sensor, 참고문헌 [4])가 복원하는 부드러운 막의 3차원 변위장이다. ShadowTac은 색이 입혀진 그림자(colored shadows)로부터 막의 전단(shear)·수직(normal) 변형을 약 200개 위치에서 측정해, 각 접촉 프레임마다 수직 변형 u_n 과 접선 변형 u_t 를 제공한다.
데이터는 별도로 수집한 것이 아니라 ShadowTac 논문 [4]의 sliding dataset을 재활용했다. 이 데이터셋은 센서에 통제된 접선 운동을 가하면서 촉각 영상과 접촉력을 동시에 기록한 것으로, 다음 조건들을 포함한다.
- 압입 깊이(indentation): 1~4 mm
- 물체 형상: 구(sphere)와 원기둥(cylinder)
- 마찰 조건: 건조(dry)와 습윤(wet)
추가로, 변위장을 6개 각도 방향으로 회전시켜 여러 방향의 미끄럼을 모사하도록 데이터 증강(augmentation)을 적용했다. 이는 뒤에서 강조되는 “접촉 방향 불변성(contact-direction invariance)”의 근거가 된다.
2) 마찰에 불변인 목표량: 안전 여유 \Gamma
추정하려는 양은 “미끄러질 조짐”을 하나의 스칼라로 표현한 안전 여유 \Gamma 다. 현재 접선력 F_t 가 거시적 미끄럼이 시작되는 임계 접선력 F_t^{*} 에 얼마나 가까운지를 비율로 나타낸다(수식 (1)).
\Gamma = \frac{F_t^{*} - F_t}{F_t^{*}}
- \Gamma = 1: 접선력이 0, 완전히 안전(전혀 안 미끄러짐)
- \Gamma = 0: 접선력이 마찰 한계에 도달, 곧 거시적 미끄럼
핵심은 \Gamma 가 마찰계수에 대해 불변(friction-invariant)이라는 점이다. 분자·분모 모두 같은 마찰 한계 F_t^{*} 로 스케일되기 때문에, 표면이 미끄럽든 거칠든 “지금 한계까지 몇 % 남았는가”라는 동일한 의미를 갖는다. 그래서 마찰계수를 따로 알 필요 없이, 변형 패턴 → \Gamma 사상만 학습하면 된다. 각 촉각 프레임은 (변위장, 그에 대응하는 \Gamma 값) 쌍으로 라벨링된다.
3) 저차원 표현: SVD로 찾은 2개의 지배 모드
이 논문의 가장 결정적인 단순화가 여기 있다. 수백 개 위치의 변형장을 통째로 다루는 대신, 특이값 분해(SVD)로 가장 지배적인 변형 패턴만 추려낸다.
3D 변위장을 두 데이터셋으로 나눈다.
- X_n: 수직 변위(normal displacement)
- X_t: 접선 변위 크기(마커들의 측면 변위의 노름)
각각에 SVD를 적용하면 막의 주요 변형 모드를 나타내는 기저 벡터가 나온다. 놀랍게도 이 구조는 극도로 압축적이었다(아래 실험 참고). 그래서 각 데이터셋의 첫 번째 주성분 u_t, u_n 만 사용해, 변위 측정을 이 기저에 사영한 두 스칼라로 줄인다.
z_t = u_t^{\top} X_t, \qquad z_n = u_n^{\top} X_n
비유하면, 모든 변형장을 일일이 기억하는 대신 “두 개의 대표 다이얼(접선 변형량 z_t, 수직 변형량 z_n)”로 접촉 상태 전체를 요약하는 것이다.
논문 그림 3
4) 해석적 안전 여유 모델
흥미롭게도 (z_t, z_n) 좌표계에서 안전 여유 \Gamma 는 규칙적인 곡면 구조를 보였다. 그래서 저자들은 신경망이나 SVM 같은 무거운 분류기 대신, 단 두 스칼라의 해석적(analytical) 함수로 \Gamma 를 적합했다(수식 (2)).
\Gamma(z_t, z_n) = 0.005134 \left( \frac{z_t}{z_n} + 1.1316 \right)^{3}
함수 형태는 적합도(goodness of fit)를 최대화하면서도 단순하고 해석 가능한 구조를 유지하도록 경험적으로 선택했다. 물리적 타당성을 위해 출력은 클리핑으로 [0, 1] 구간에 가뒀다. 이 단순 모델이 달성한 성능은 MAE = 0.11, R^2 = 0.77 이다.
직관적으로 보면 핵심 변수는 비율 z_t / z_n, 즉 “수직으로 눌린 정도 대비 옆으로 끌린 정도”다. 같은 양만큼 눌렀어도 옆으로 더 많이 끌릴수록(=z_t/z_n이 커질수록) 미끄러짐에 가까워진다는, 마찰원뿔(friction cone) 개념과 잘 들어맞는 형태다. 이는 미끄럼 동역학이 막 변형장의 저차원 다양체(low-dimensional manifold) 위에 놓여 있고, 두 모드만으로 본질적 거동을 포착할 수 있음을 의미한다.
5) 그리퍼 구현과 파지력 조절 루프
제안 표현을 실제 조작에서 검증하기 위해, ShadowTac을 로봇 그리퍼에 장착하고 실시간 제어기에 통합했다. 제어 구조는 두 개의 중첩된 PID 루프다.
- 내부 루프(inner loop): Teensy 마이크로컨트롤러에서 100 kHz로 모터 명령을 조절(저수준 힘/위치 추종).
- 외부 루프(outer loop): 일반 노트북 CPU(Intel i7-1265U @ 1.80 GHz)에서 약 20 Hz로 동작. 수식 (2)로 \Gamma(z_t, z_n) 를 추정하고, 목표 안전 여유 \Gamma_\text{set} 를 유지하도록 수직 파지력 F_n 을 조절.
Outer loop (~20 Hz, laptop CPU):
field <- read ShadowTac deformation (un, ut)
zt, zn <- project field onto 1st principal modes
Gamma <- 0.005134 * (zt / zn + 1.1316)^3 # clipped to [0,1]
err <- Gamma_set - Gamma # Gamma_set = 0.7
Fn <- PID(err) # raise grip if too close to slip
send(Fn) -> inner loop
Inner loop (100 kHz, Teensy):
track desired normal force Fn with motor command이 방식의 우아함은, 마찰계수나 물체 무게를 명시적으로 추정하지 않고도 변형 패턴 → 안전 여유 → 힘 조절이라는 단일 폐루프로 다양한 물체에 일반화된다는 데 있다. 외부 루프가 가벼운 해석식 한 줄이기 때문에 평범한 CPU에서도 실시간으로 돈다.
실험
1) 미끄럼의 저차원 구조
먼저 변형장이 정말로 저차원으로 압축되는지 확인했다. SVD 결과는 매우 압축적이었다.
| 데이터셋 | 첫 1개 성분 분산 설명 | 첫 3개 성분 분산 설명 |
|---|---|---|
| X_n (수직 변형) | 93% | 96% |
| X_t (접선 변형) | 81% | 98% |
즉 단 하나의 주성분이 분산의 대부분(81~93%)을 설명한다. 이 압도적 지배성 때문에 첫 주성분 사영 z_t, z_n 두 개만으로 접촉 상태를 표현하는 것이 정당화된다.
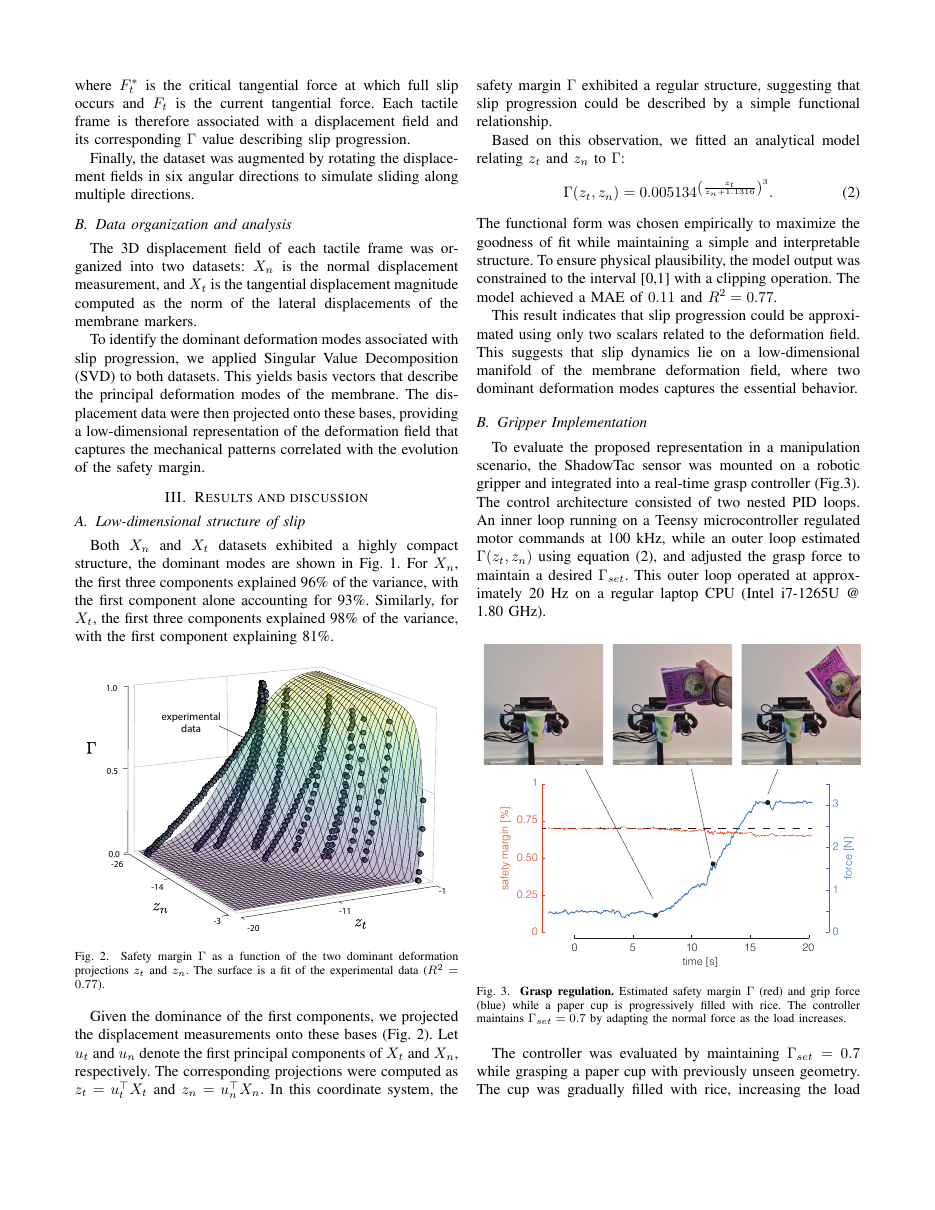
2) 안전 여유 곡면 적합
두 사영 z_t, z_n 을 축으로 안전 여유 \Gamma 를 그리면(논문 Fig. 2), 실험 데이터가 규칙적인 곡면을 이루고 수식 (2)의 해석 모델이 이를 잘 적합한다(R^2 = 0.77, MAE = 0.11). 즉 고차원·시공간적으로 보였던 “미끄러질 조짐”이 실제로는 두 스칼라의 매끈한 함수로 환원된다는 것이 핵심 결과다.
논문 PDF — p.2
3) 그리퍼 실증: 쌀로 채워지는 종이컵
가장 인상적인 데모(논문 Fig. 3)는 학습에 쓰지 않은 형상의 종이컵을 잡고, 목표 안전 여유 \Gamma_\text{set} = 0.7 을 유지하는 실험이다.
- 종이컵에 쌀을 점진적으로 부어 하중을 시간에 따라 증가시킨다.
- 제어기는 하중이 늘수록 수직 파지력을 키워 \Gamma \approx 0.7 을 계속 유지하고, 약 20초의 작업 내내 미끄럼을 막는다.
- 동시에 종이컵이라는 연약한 물체를 찌그러뜨리지 않을 만큼만 힘을 준다(과파지 회피).
또한 임의 방향으로 가한 갑작스러운 외란(disturbance)에도 제어기가 빠르게 반응해 안정성을 유지함을 추가 실험(동영상)으로 보였다.
논문 PDF — p.3
의미
이 결과들이 말하는 바는 명확하다. 본질적으로 고차원·시공간적인 “미끄러질 조짐”이, 실제로는 단 2개의 변형 모드로 압축 가능하며, 그 압축본만으로 마찰·형상을 몰라도 안전 여유를 정확·고속으로 읽을 수 있다. 무거운 신경망이나 원시 이미지 처리 없이, 해석식 한 줄과 평범한 CPU로 실시간(20 Hz) 반사적 파지 제어가 가능하다는 점이 실용적 메시지다.
비판적 고찰
강점
- 극단적 저차원·해석성: 안전 여유를 두 스칼라의 닫힌형 함수로 표현하므로, 거대 신경망 대비 가볍고 빠르며 디버깅·해석이 쉽다. 첫 주성분이 분산의 81~93%를 설명한다는 점이 이 단순화를 강하게 뒷받침한다.
- 마찰·형상·방향 불변성: \Gamma 정의 자체가 마찰 한계로 정규화돼 마찰에 불변이고, 6방향 회전 증강으로 접촉 방향에도 둔감하다. 보지 못한 형상(종이컵)에서도 작동했다.
- 실시간성과 이식 용이성: 외부 루프가 일반 노트북 CPU에서 20 Hz로 도는, 실제 그리퍼에 통합된 실증을 보였다. 원시 이미지를 센서마다 재학습해야 하는 기존 접근의 이식 어려움([기존 연구 대비])을 회피한다.
- 연약 물체 보호: 쌀로 채워지는 종이컵 데모는 “떨어뜨리지 않으면서도 부수지 않는” 절충을 직접 보여준다.
약점·한계
- work-in-progress 수준의 검증: 저자들 스스로 work in progress로 명시한다. 정량 평가는 곡면 적합(R^2 = 0.77, MAE = 0.11)과 종이컵 1종의 정성적 데모에 그치고, 다양한 물체·재질에 대한 체계적 성공률·실패 분석이 없다.
- 적합도의 여지: R^2 = 0.77 은 곡면을 “대체로” 설명하지만, 미끄럼 직전의 민감한 구간에서 0.11의 MAE가 안전에 충분한지는 불명확하다. 또 모델 형태(3제곱 등)가 경험적으로 선택돼 물리적 도출이 아니다.
- 단 2개 모드의 일반성: 1~4 mm 압입, 구/원기둥, 건/습이라는 통제된 조건에서 두 모드가 지배적이었다. 모서리·평면 접촉, 회전 미끄럼(torsional slip), 다중 접촉점 등에서도 첫 주성분만으로 충분할지는 검증되지 않았다.
- 목표 안전 여유 설정: \Gamma_\text{set} = 0.7 을 어떻게 정하고 물체 취약성·작업에 따라 적응시킬지는 본 방법이 답하지 않는다.
- 센서 종속성: ShadowTac의 약 200개 위치 변형장에 맞춰진 기저다. 다른 vision-based 촉각 센서로의 전이는 다시 검증이 필요하다(역설적으로 raw-image 접근의 이식 문제를 일부만 해결).
후속 과제(저자 명시)
저자들은 더 넓은 접촉 조건에서의 견고성, 그리고 보지 못한 형상·마찰 영역으로의 일반화 능력을 향후 연구로 제시한다.
관련 연구 비교
- 원시 이미지 기반 미끄럼 추정(참고문헌 [3], Dong et al., ICRA 2019; [5], Sui et al. 2021): 촉각 이미지에서 직접 incipient slip을 추정한다. 정확하지만 계산이 무겁고 센서 간 전이가 어렵다. 본 연구는 동일 문제를 2차원 잠재공간 + 해석식으로 풀어 경량·이식성을 노린다.
- 얕은 신경망 + 3D 변형장(참고문헌 [2], Boonstra et al., ICRA 2024, 동일 그룹): 전체 3D 변위장을 얕은 신경망에 넣어 안전 여유를 추정했다. 그러나 full 3D 변형장은 고차원이라 미끄럼 정보와 형상·연성 같은 물체 속성이 얽힌다. 본 연구는 SVD로 이를 분리해 더 압축적·불변적 표현을 얻는다.
- 마찰 추정/incipient slip 검출 리뷰(참고문헌 [1], Chen et al., IEEE Sensors 2018): 분야 전반의 개관. 본 연구는 마찰을 명시 추정하는 대신 마찰 불변 안전 여유로 직행한다.
- 인간 촉각의 저차원 부호화(참고문헌 [6], Willemet et al., Sci. Rep. 2022, 동일 그룹): 사람의 체성감각계가 미끄럼 정보를 소수의 공간 기저로 압축한다는 관찰이 본 연구의 직접적 동기다. 본 연구는 그 통찰을 로봇 촉각 센서(ShadowTac)로 옮겨 실제 파지 제어에 구현했다.
요약 및 결론
이 연구의 메시지는 포스터의 한 줄 슬로건으로 압축된다: “Compress touch. Predict slip. Regulate grip.”
- ShadowTac이 주는 막 변형장(약 200개 위치)을 SVD로 분해하면 첫 주성분 하나가 분산의 81~93%를 설명할 만큼 압축적이다.
- 그 첫 주성분 사영 두 개 (z_t, z_n) 만으로, 마찰 불변 안전 여유 \Gamma 를 해석식 \Gamma = 0.005134(z_t/z_n + 1.1316)^3 으로 추정한다(R^2 = 0.77, MAE = 0.11).
- 이를 100 kHz 내부 / 약 20 Hz 외부의 중첩 PID에 연결해, 쌀로 채워지는 종이컵을 \Gamma_\text{set} = 0.7 로 안정적으로 잡는 실시간 파지 조절을 실증했다.
로봇공학 관점에서 이는 무거운 인지 파이프라인 없이도 빠르고 해석 가능하며 캘리브레이션이 거의 필요 없는 반사적 파지 제어로 가는 실용적 경로를 보여준다. 다만 work-in-progress인 만큼, 두 모드 표현의 일반성과 다양한 물체·동적 조작에서의 견고성을 넓게 검증하는 것이 다음 과제다.