flowchart LR
A[Contact object] --> B[Soft skin deforms]
B --> C[Internal pins shift]
C --> D[Markers move]
D --> E[Camera captures tactile image]
E --> F[SSIM vs no-contact reference]
F --> G[Deformation quantification]
📃Monolithic 3D-Printed Tactile Sensor
tactile
sensor
3d-print
Characterisation of a Monolithic 3D-printed Tactile Sensor Using an SSIM-based Analysis
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
촉각 센서가 풀려는 문제
로봇이 물건을 집고, 미끄러짐을 감지하고, 표면의 결을 읽으려면 “만진다”는 행위를 데이터로 바꿔야 합니다. 시각 기반 촉각 센서(Vision-Based Tactile Sensor, VBTS) 는 이 문제를 우아하게 해결합니다. 부드러운 피부 안쪽에 카메라를 넣어 두고, 피부가 눌릴 때 생기는 변형을 카메라가 “본다”는 발상입니다. 카메라 한 대가 수백 개의 접촉 지점을 동시에 고해상도로 읽어 주기 때문에, 전기 배선이 빽빽한 기존 전자식 촉각 센서보다 공간 해상도가 압도적으로 높습니다.
이 논문이 출발점으로 삼는 TacTip 계열은 VBTS의 대표적 한 갈래입니다. 핵심 비유는 이렇습니다. 사람 손가락 피부 안쪽에는 표피와 진피가 맞물리는 구조가 있고, 표면이 눌리면 그 경계가 옆으로 밀리며 촉각 수용기를 자극합니다. TacTip은 이 구조를 생체모사해 부드러운 피부 안쪽에 핀(pin)을 촘촘히 박고, 그 안쪽 끝에 흰 마커(marker)를 둡니다. 피부가 변형되면 핀과 마커가 따라 움직이고, 카메라가 마커의 이동을 추적해 접촉을 추론합니다.
이 논문이 손보려는 지점 — 제작 공정
기존 TacTip은 성능은 좋지만 제작 공정이 번거롭습니다. 특히 부드러운 내부 영역을 채우는 “젤(gel)” 주입(gel injection) 단계가 문제입니다. 단단한 베이스·창(window)·마커층을 프린트한 뒤, 따로 부드러운 젤을 부어 넣고 경화시키는 다단계 공정을 거쳐야 하죠. 이 주입 단계는 (1) 개체마다 충진 상태가 미묘하게 달라 변동성(variability) 을 키우고, (2) 공정 자체를 복잡하게 만듭니다.
이 논문(Bristol Robotics Laboratory, Xiaoqing Guo, Nathan F. Lepora, Efi Psomopoulou, ICRA 2026 ViTac Workshop accepted paper #12)의 출발 아이디어는 간단합니다. 젤 주입을 없애 버리자. 부어 넣는 폴리머 혼합 젤 대신, 다중 재료 3D 프린터로 직접 출력할 수 있는 부드러운 투명 고체(soft transparent solid) 로 내부 영역을 대체합니다. 그러면 피부·핀·마커층·내부 충진재가 단 한 번의 프린트 사이클(single-cycle fabrication)로 한 몸에 만들어집니다. 저자들은 이 센서를 Mono3D-TacTip 이라 부릅니다.
여기서 자연스러운 질문이 따라옵니다. “한 몸으로 출력한 이 센서가 실제로 어떻게 변형되고, 무엇이 그 변형 감도를 결정하는가?” 논문은 이 특성화를 위해 SSIM(구조적 유사도 지표) 을 측정 도구로 도입합니다.
핵심 기여 (논문 명시)
논문이 직접 밝힌 기여는 세 가지입니다.
- 모놀리식 3D 프린팅 촉각 센서: 부드러운 투명 고체로 젤 주입 단계를 제거.
- SSIM 기반 변형 정량화 프레임워크: 이미지 유사도로부터 변형량을 정량화.
- 두 개의 지배 메커니즘 규명: 핀 길이(pin length) 는 기계적 변형 전달을 제어하고, 유효 젤 두께(effective gel thickness) 는 굴절을 통한 광학적 증폭을 제어한다는 사실의 실험적 규명.
논문 그림 1
방법
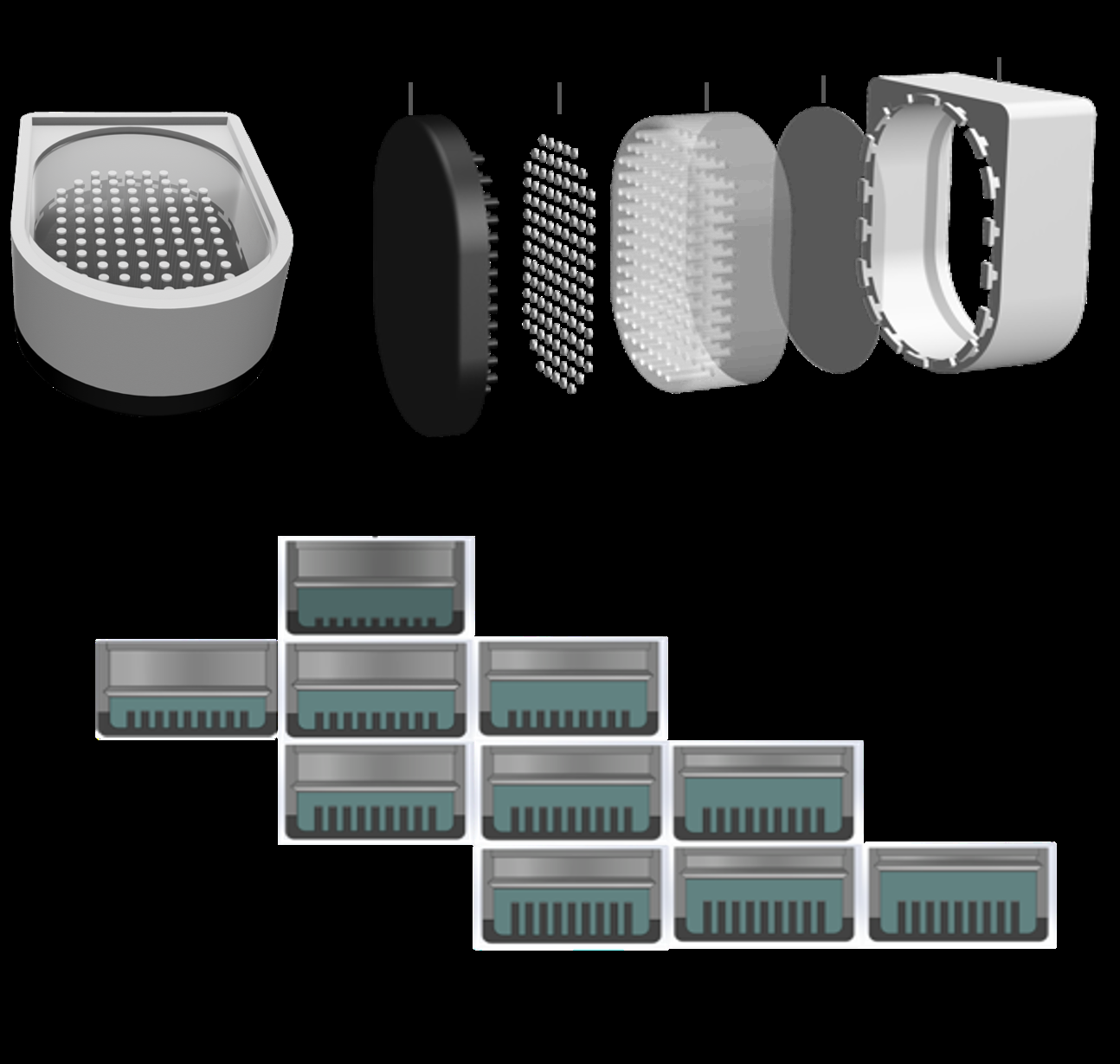
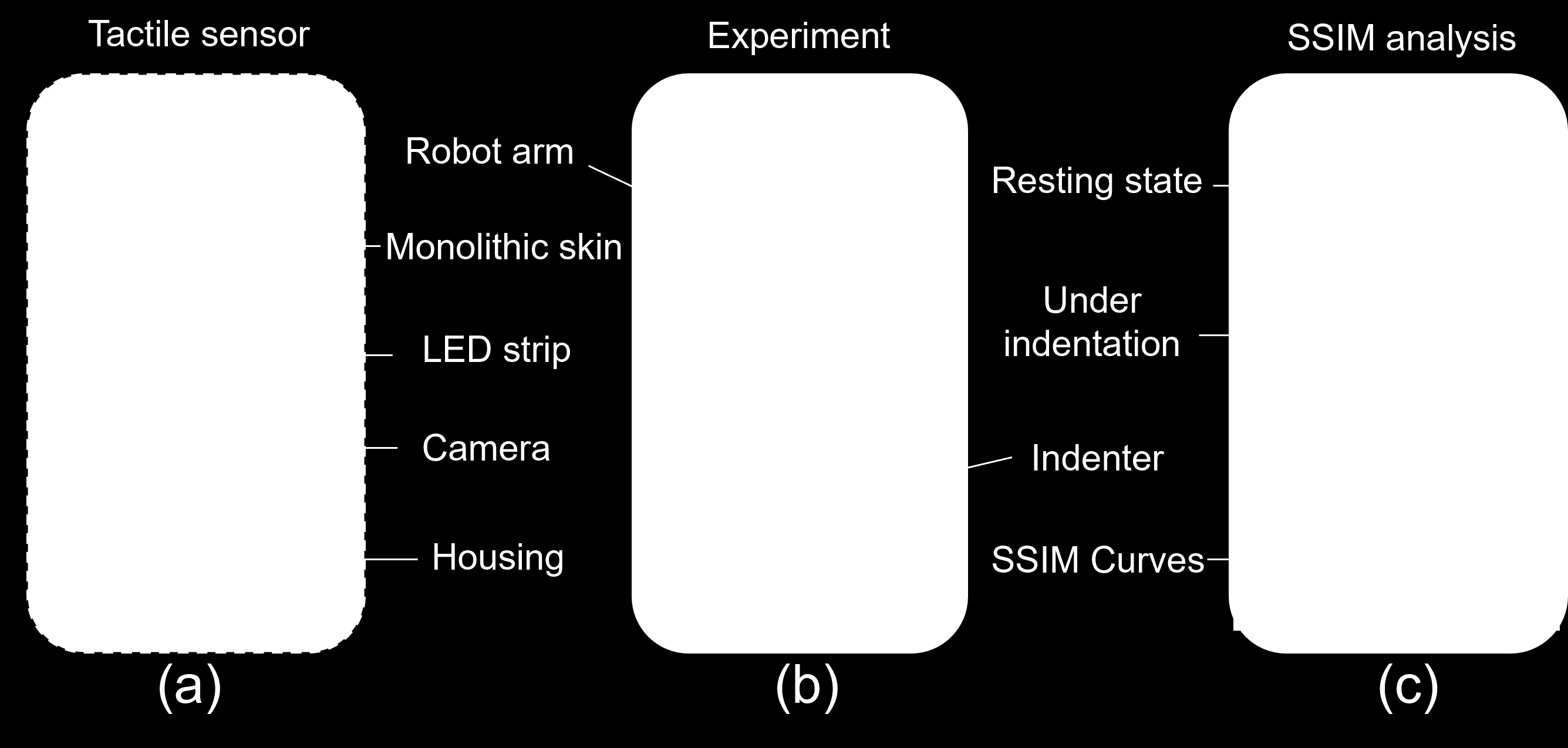
센서 설계와 제작
Mono3D-TacTip은 TacTip의 기본 구조 — 피부(skin), 핀(pins), 마커층(marker layer), 젤 영역(gel region), 창(window), 받침(cradle) — 를 그대로 물려받되, 부드러운 내부 영역을 프린팅으로 직접 만든다는 점이 다릅니다. 재료 배분은 다음과 같습니다.
- 피부와 핀: 유연한 Agilus 재료
- 마커층과 창: 단단한 Vero 재료
- 창 표면: 광학적 투명도를 높이기 위해 프린트 후 얇은 UV 레진 코팅을 추가
논문 그림 2
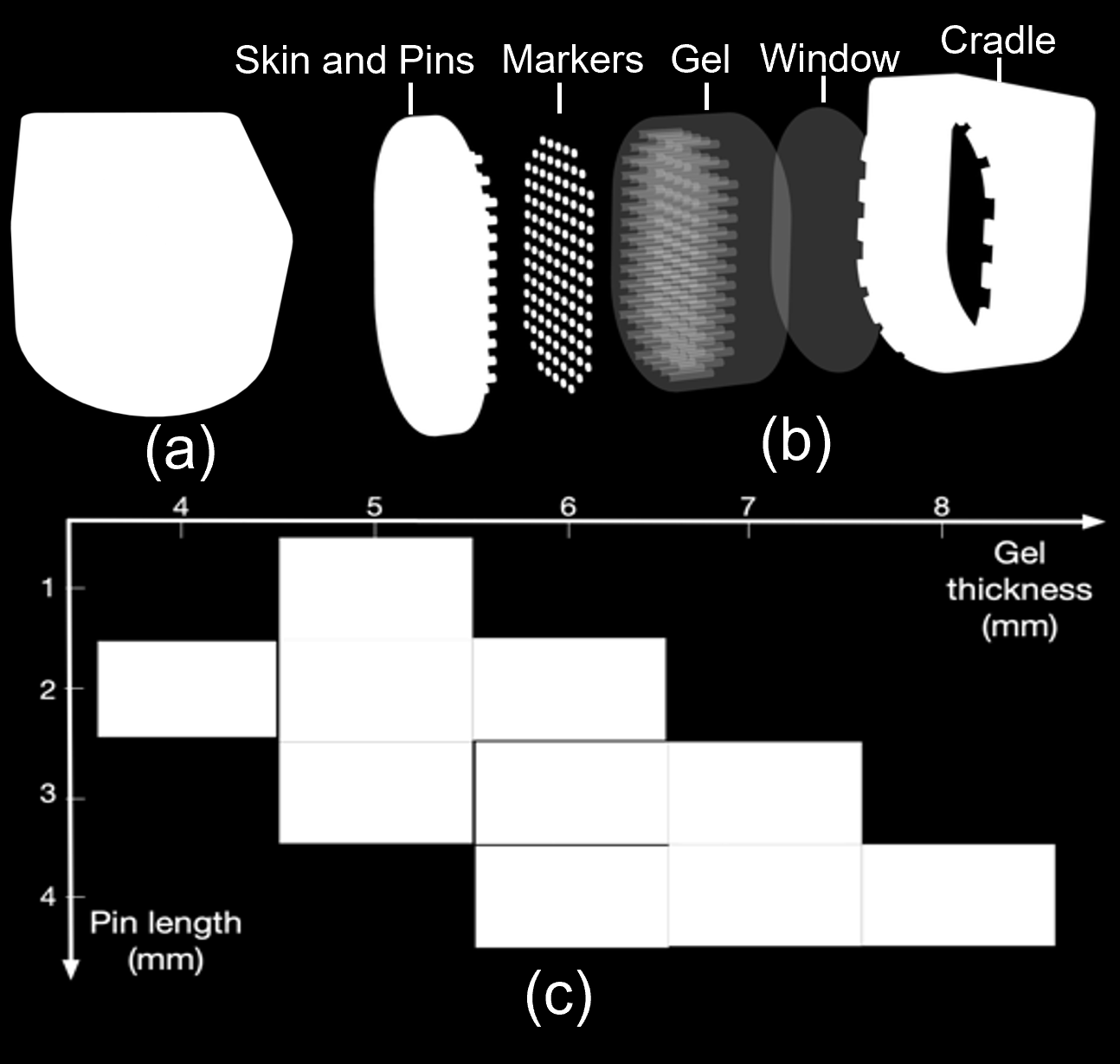
저자들은 젤 두께와 핀 길이를 바꿔 가며 여러 구성을 만들었습니다. 직관적으로, 젤이 두껍고 핀이 짧을수록 더 잘 눌립니다(compliance 증가). 다만 젤이 지나치게 두꺼우면 부드러운 재료 내부에 누적된 3D 프린팅 텍스처 때문에 마커가 흐려져 보이는 문제가 생깁니다. 실험적으로, 마커 평면과 젤 표면 사이 거리 t가 4 mm 이하일 때 마커가 또렷하게 보였습니다. 그래서 compliance와 마커 가시성의 균형을 맞춘 10가지 구성을 설계했습니다.
핵심 묶음 변수는 유효 젤 두께(effective gel thickness) t로, 다음처럼 정의됩니다.
t = D_{\text{gel}} - L_{\text{pin}}
여기서 D_{\text{gel}}은 젤 두께, L_{\text{pin}}은 핀 길이입니다. 즉 “젤 두께에서 핀이 차지한 만큼을 뺀, 핀 끝 위쪽에 남은 순수 투명 고체 두께”가 t입니다. 이 t 값으로 10개 센서를 세 그룹으로 묶었습니다.
| 그룹 | 유효 두께 t | 구성 (gel–pin) |
|---|---|---|
| 그룹 1 | t = 2 mm | gel4–pin2, gel5–pin3, gel6–pin4 |
| 그룹 2 | t = 3 mm | gel5–pin2, gel6–pin3, gel7–pin4 |
| 그룹 3 | t = 4 mm | gel5–pin1, gel6–pin2, gel7–pin3, gel8–pin4 |
(숫자는 각각 젤 두께와 핀 길이를 mm 단위로 나타냅니다. 예: gel6–pin4 → D_{\text{gel}}=6, L_{\text{pin}}=4, 따라서 t=2.)
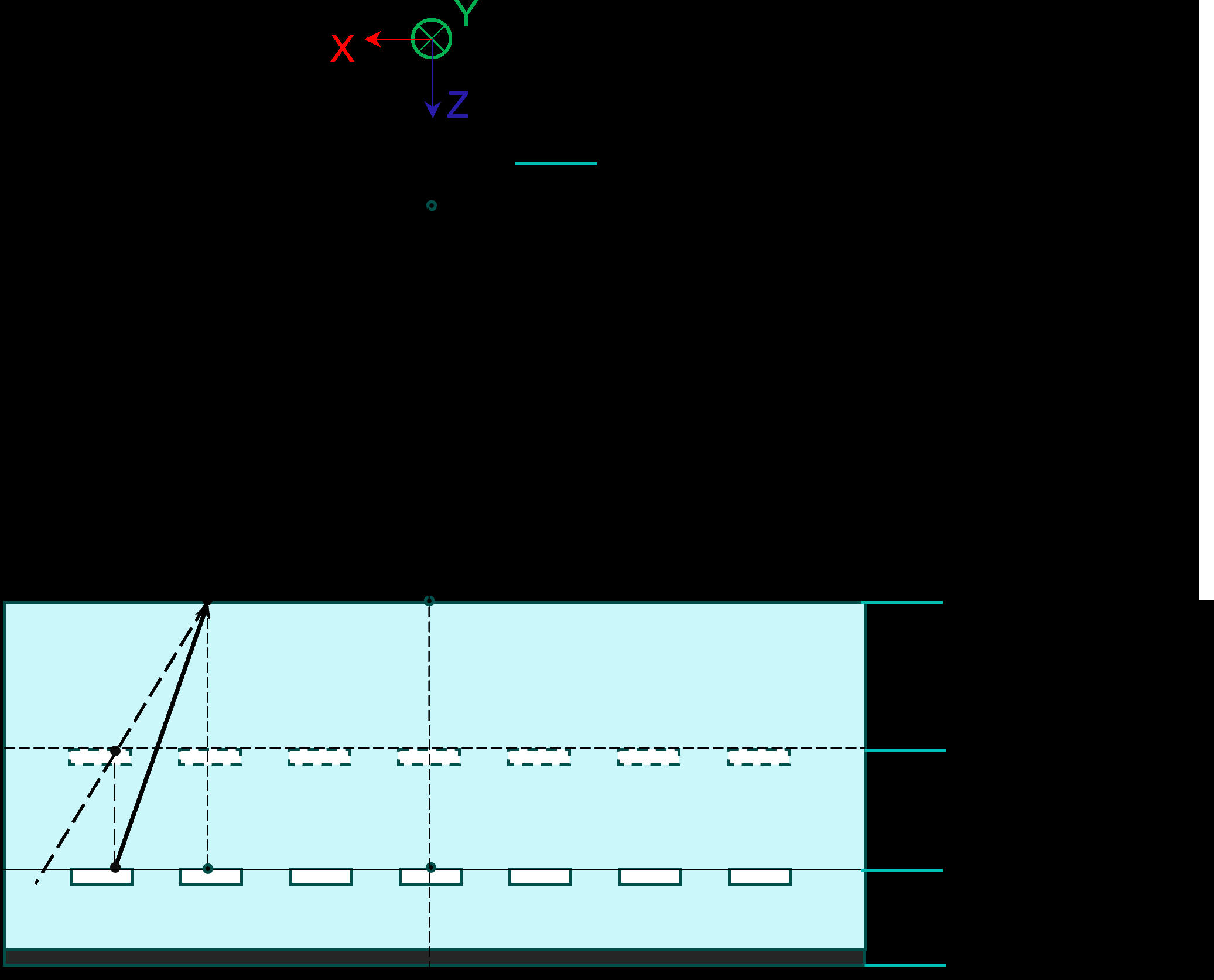
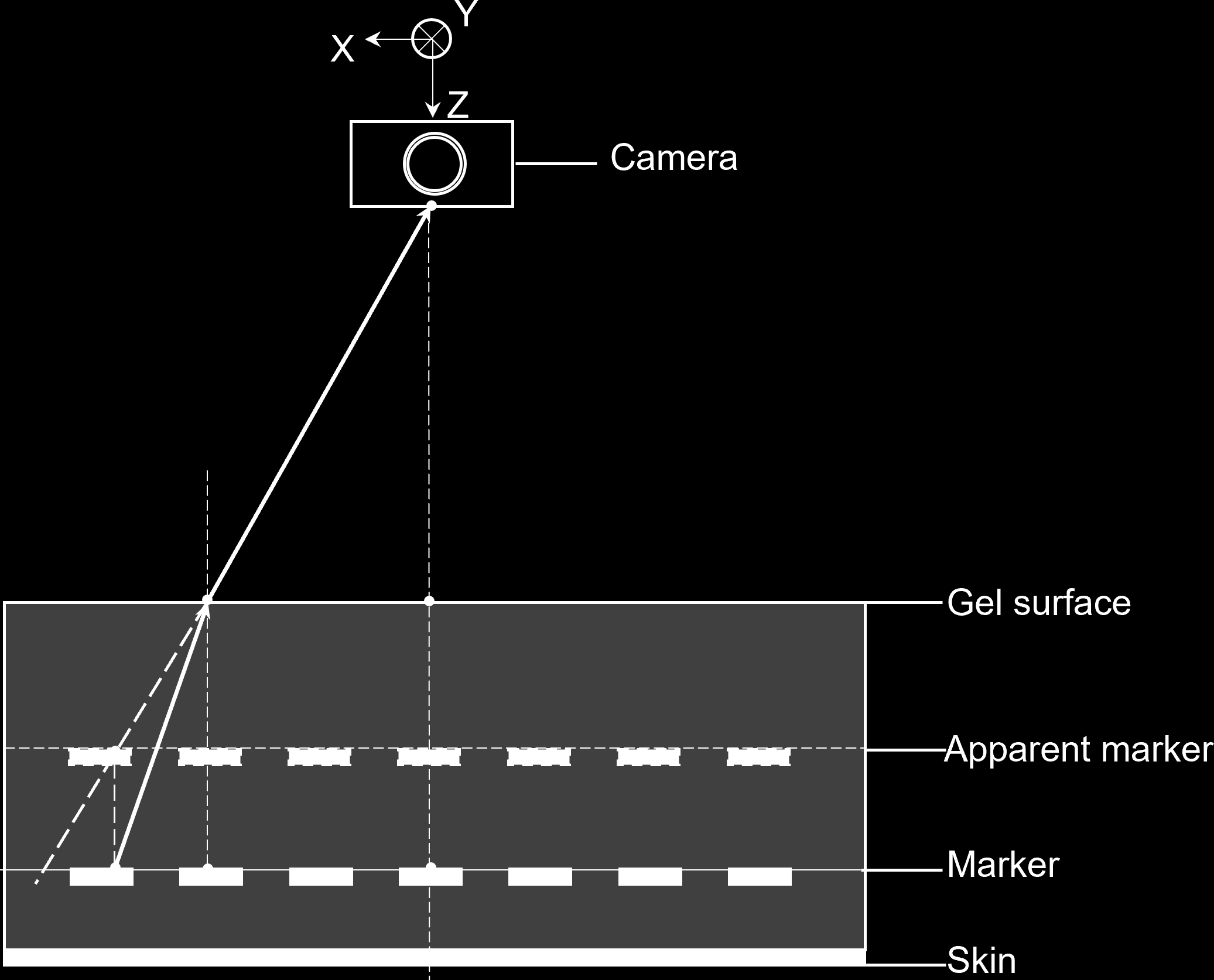
굴절을 고려한 광학 모델
이 논문에서 가장 흥미로운 통찰 하나는, 마커가 카메라에 보이는 위치가 실제 위치와 다르다는 점입니다. 마커 위에 투명 젤(고체)이 덮여 있고, 빛이 젤–공기 경계를 지나며 굴절(refraction) 되기 때문입니다. 빨대를 물컵에 담그면 꺾여 보이는 것과 같은 원리입니다.
flowchart TD
M[Marker true position x_true] --> R[Light bends at gel boundary]
R --> A[Apparent position x_app seen by camera]
A --> N[Refraction influence factor k]
N --> X[Recover x_true = 1-k times x_app]
저자들은 근축 근사(paraxial approximation) 아래에서 핀홀 결상 관계가 선형으로 유지된다고 보고, 실제 위치 x_{\text{true}}와 굴절을 무시했을 때의 겉보기 위치 x_{\text{app}} 사이를 다음처럼 연결합니다.
x_{\text{true}} = (1 - k)\, x_{\text{app}}
여기서 굴절 영향 계수(refraction influence factor) k는
k = \frac{D_{\text{gel}} - L_{\text{pin}}}{D - L_{\text{pin}}}\left(1 - \frac{1}{n}\right)
- D: 카메라 핀홀과 피부 평면 사이 축 방향 거리
- n: 젤의 굴절률
- 분자 D_{\text{gel}} - L_{\text{pin}}은 곧 유효 젤 두께 t
직관적으로 읽으면, 젤이 두꺼울수록(즉 t가 클수록) 굴절 영향 k가 커지고, 같은 물리적 변형이라도 카메라가 보는 마커 변위가 더 크게 “증폭” 됩니다. 굴절률 n이 1(공기)에 가까울수록 1 - 1/n \to 0이 되어 굴절 효과가 사라지는 것도 식에서 바로 보입니다. 이 광학적 증폭이 뒤에서 SSIM 감도를 좌우하는 핵심 축이 됩니다. (참고: 포스터에는 같은 식이 t/L 형태로 더 간결하게 표기되어 있으나, 본문 정의를 우선했습니다.)
논문 그림 3
SSIM 기반 변형 정량화
이제 변형을 어떻게 “잰” 것인지 봅시다. 저자들은 압입(indentation) 중 얻은 각 이미지를 접촉이 없는 기준 이미지(no-contact reference) 와 SSIM 으로 비교합니다.
SSIM(Structural Similarity Index)은 두 이미지가 사람 눈에 얼마나 비슷한가를 0~1로 재는 지표입니다. 픽셀값 차이의 제곱만 보는 MSE/PSNR과 달리, 이미지를 밝기(luminance)·대비(contrast)·구조(structure) 세 측면으로 나눠 비교합니다. 표준 정의는 다음과 같습니다(Wang et al., 2004).
\mathrm{SSIM}(x,y) = \frac{(2\mu_x \mu_y + C_1)\,(2\sigma_{xy} + C_2)}{(\mu_x^2 + \mu_y^2 + C_1)\,(\sigma_x^2 + \sigma_y^2 + C_2)}
- \mu_x, \mu_y: 두 패치의 평균 밝기 (밝기 비교)
- \sigma_x, \sigma_y: 표준편차 (대비 비교)
- \sigma_{xy}: 공분산 (구조 비교)
- C_1, C_2: 분모가 0에 가까울 때 식을 안정화하는 작은 상수
촉각 이미지의 핵심 정보는 결국 마커들이 어떤 패턴으로 배치·이동했는가라는 구조이므로, 구조 항을 명시적으로 다루는 SSIM은 촉각 이미지 비교에 잘 맞습니다. 접촉이 깊어질수록 마커가 많이 움직여 이미지가 기준에서 멀어지고, 따라서 SSIM은 1에서 점점 떨어집니다. 즉 \mathrm{SSIM}의 하락폭이 곧 변형의 크기를 대변합니다.
논문 그림 4
이중 가우시안 모델
측정된 SSIM–깊이 곡선은 접촉 깊이 d에 따라 비대칭적으로 감소합니다. 저자들은 이 비대칭 감쇠를 잡아내기 위해 이중 가우시안(double-Gaussian) 모델로 곡선을 피팅합니다.
\mathrm{SSIM}(d) = A_1 \exp\!\left(-\frac{d^2}{2\sigma_1^2}\right) + A_2 \exp\!\left(-\frac{(d - \mu_2)^2}{2\sigma_2^2}\right) + C
각 파라미터의 물리적 의미는 다음과 같이 읽으면 직관적입니다.
| 파라미터 | 의미 | 직관 |
|---|---|---|
| A_1 | 표면 근처 성분의 진폭 (near-surface amplitude) | 초기 SSIM 하락의 가파름 |
| \sigma_1 | 첫 성분의 폭 (near-surface deviation) | 표면 응답이 얼마나 국소적인가 |
| \mu_1 = 0 | 접촉 시작 위치 | 첫 가우시안은 접촉 시점에 중심 |
| A_2 | 깊은 변형 성분의 진폭 | 깊이 방향 2차 기여 |
| \mu_2 | 특성 깊이 (characteristic depth) | 깊은 응답이 지배적이 되는 깊이 |
| \sigma_2 | 두 번째 성분의 폭 | 깊은 변형의 공간적 퍼짐 |
첫 가우시안(중심 d=0)은 표면 근처의 즉각적 변형을, 두 번째 가우시안(중심 \mu_2)은 더 깊은 곳에서 뒤따라 일어나는 변형을 분리해 담습니다. 포스터에 따르면 단일 가우시안도 전체 추세는 잡지만, 이중 가우시안이라야 표면 효과와 깊은 효과를 분리해 해석할 수 있습니다.
실험
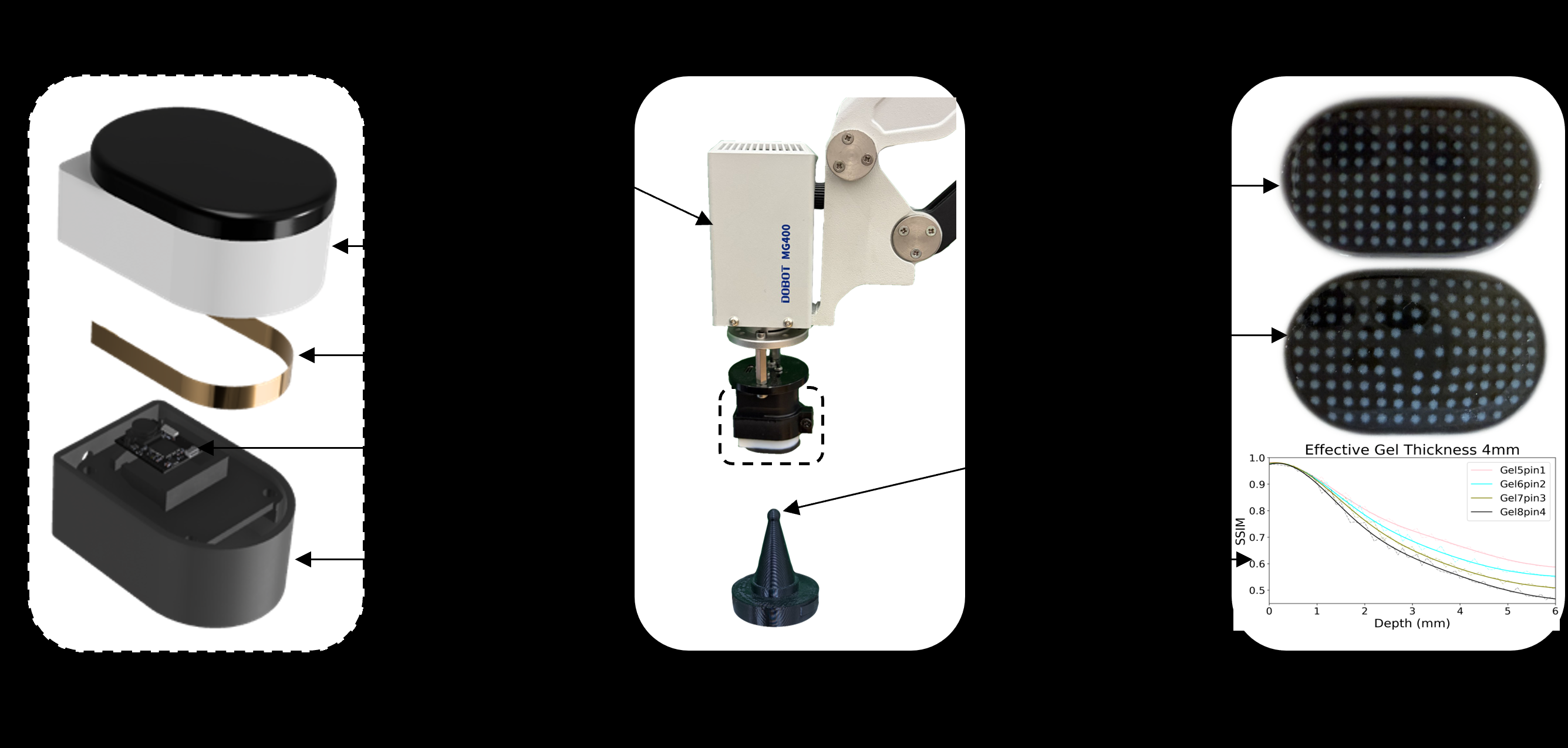
실험 셋업
- 압입 방식: 구형 팁(sphere-tipped) 압입기를 촉각 표면 중앙에 수직으로 밀어 넣음
- 증분: 0.1 mm 간격으로 깊이를 증가시키며 정상 변형(normal deformation)을 측정
- 이미지 취득: 각 깊이마다 5회 촬영하여 평균(노이즈 저감), 조명은 제어된(어두운) 환경에서 고정
- 대상: 젤 두께·핀 길이 조합으로 만든 10개 구성 전부
- 각 깊이의 5개 SSIM 값을 평균해 SSIM–깊이 응답 곡선을 구성
핵심 결과
전체적으로 SSIM은 압입 깊이에 따라 단조 감소했고, 그 감쇠 프로파일은 구조 설계(핀 길이, 젤 두께)에 강하게 의존했습니다. 핵심은 두 변수를 따로 떼어 봤을 때의 경향입니다.
(1) 유효 젤 두께 t 고정, 핀 길이 증가 → 기계적 전달 지배
- A_1(표면 근처 진폭)이 단조 증가 → 변형 전달이 강해지고 초기 SSIM 하락이 더 가팔라짐
- \sigma_1 감소 → 표면 응답이 더 국소화됨
- A_2도 증가하지만 여전히 A_1보다 훨씬 작음 → 깊은 변형은 2차적 기여
- \mu_2 감소, \sigma_2 증가 → 지배적 변형 응답이 더 일찍 나타나고 공간적으로 더 넓게 퍼짐
해석: 핀이 길수록 접촉력을 마커로 더 일찍, 더 강하게 전달한다. 핀은 기계적 지렛대처럼 작동한다.
(2) 핀 길이 고정, 유효 젤 두께 증가 → 광학적 증폭 지배
- A_1 증가 → 더 강한 굴절 증폭(refractive amplification) 때문
- \mu_2 감소, \sigma_1 감소 → 더 일찍, 더 날카로운 SSIM 저하
- \sigma_2 증가 → 큰 깊이에서는 더 완만한 감쇠
해석: 젤이 두꺼울수록 굴절이 마커의 겉보기 변위를 키워 SSIM 감도를 끌어올린다. 이는 위 광학 모델에서 t가 커지면 k가 커지는 것과 정확히 부합합니다.
논문은 피팅 파라미터들을 굴절 영향 계수 K의 함수로 정리해(Fig. 5의 6개 서브플롯, A_1, A_2, \sigma_1, \sigma_2, \mu_2, C 각각이 K \approx 0.03–0.06 범위에서 어떻게 변하는지) 두 메커니즘을 시각화합니다.
논문 그림 5
flowchart TD
P[Pin length up] --> M1[Mechanical transmission]
M1 --> A1u[A1 up, sigma1 down: steeper local drop]
G[Effective gel thickness t up] --> M2[Optical amplification via refraction]
M2 --> A1u2[A1 up: larger apparent displacement]
A1u --> S[SSIM-depth curve shape]
A1u2 --> S
결론적 발견
핀 길이는 기계적 변형 전달을 지배하고, 유효 젤 두께는 굴절을 통한 광학적 증폭을 지배한다. 그리고 이 둘이 함께 SSIM 응답을 결정한다.
즉 동일한 SSIM 감도를 내는 방법이 둘(기계적 / 광학적)이라는 점, 그리고 이를 설계 변수로 분리해 조절할 수 있다는 점이 이 논문의 실용적 메시지입니다.
비판적 고찰
강점
- 메커니즘의 분리·해석: 단순히 “잘 눌린다”가 아니라, SSIM 감도를 기계적 전달(핀 길이) 과 광학적 증폭(젤 두께) 이라는 두 물리 축으로 깔끔하게 분해했습니다. 굴절 영향 계수 k라는 단일 변수로 광학 효과를 매개한 점이 특히 우아합니다.
- 제작 단순화의 실질적 가치: 젤 주입 제거는 단순한 편의가 아니라, 개체 변동성을 줄이고 양산성을 높이는 직접적 이득입니다. 단일 프린트 사이클이라는 점이 설계 반복(design iteration)도 빠르게 만듭니다.
- 태스크-독립 지표: SSIM은 라벨도 학습도 필요 없는 결정론적 지표라, 다운스트림 분류 정확도 같은 간접 측정과 달리 센서 물성 자체를 곧장 잰다는 장점이 있습니다.
- 모델의 해석력: 이중 가우시안은 단일 가우시안보다 파라미터 수가 많지만, 그 대가로 표면/심부 변형을 분리해 각각의 물리적 의미를 부여할 수 있습니다.
약점·한계
- 표본·통계의 범위: 워크숍 논문 분량상 10개 구성 각각에 대한 반복 측정은 깊이당 5회로 제한적입니다. 개체 간 재현성(같은 설계로 여러 개 출력 시 편차)에 대한 정량 보고는 본문에서 보이지 않아, “모놀리식 = 재현성 향상”이라는 일반 주장까지 검증되지는 않았습니다. (본문에서 직접 다루지 않음)
- SSIM의 표현 한계: SSIM은 밝기·대비 항을 포함하므로 내부 조명·노출 변화에 민감할 수 있습니다. 본 실험은 어두운 제어 환경으로 이를 통제했지만, 실제 핸드 장착·외란 조건에서의 견고성은 검증 범위 밖입니다.
- 방향 정보 손실: SSIM은 전역적 구조 유사도를 보지만, 마커 변위의 방향(전단 vs 수직)을 그대로 구분하지는 못합니다. 이 논문은 수직 압입만 다뤘으므로 전단·미끄러짐 감지로의 일반화는 추후 과제입니다.
- 근축 근사의 적용 범위: 광학 모델은 근축 근사에 기대므로, 큰 변형·큰 시야각에서 선형 관계 x_{\text{true}}=(1-k)x_{\text{app}}의 유효성은 추가 검증이 필요합니다.
- 마커 가시성 트레이드오프: 젤이 두꺼울수록 감도는 오르지만 t > 4 mm에서 프린팅 텍스처로 마커가 흐려지는 물리적 상한이 존재합니다. 즉 광학적 증폭으로 감도를 무한정 키울 수는 없습니다.
관련 연구와의 비교
- TacTip 계열(같은 그룹, Ward-Cherrier et al. 2018): 생체모사 형상을 3D 프린팅으로 구현했지만 젤 주입을 포함한 다단계 제작에 의존했습니다. 본 논문은 그 젤을 직접 출력 가능한 투명 고체로 대체해 단일 사이클로 만들었다는 점이 핵심 차별점입니다.
- TacTip 응용 연구들(tactile servoing, Bi-Touch, NeuralTouch 등): 이들은 센서를 다운스트림 태스크 정확도로 평가했습니다. 본 논문은 태스크 이전 단계에서 변형 응답 자체를 SSIM으로 특성화한다는 점에서 상보적입니다.
- 촉각 이미지 유사도 활용 선행 연구(예: cross-modal 촉각 데이터 생성, Lee–Bollegala–Luo 2019): SSIM이 촉각 인지·생성 검증에 쓰여 온 흐름을 잇되, 본 논문은 그 도구를 제작 특성화 + 물리 메커니즘 규명이라는 목적에 적용했습니다.
요약 및 결론
이 논문은 젤 주입 단계를 없앤 모놀리식 3D 프린팅 촉각 센서(Mono3D-TacTip) 를 제안하고, 그 변형 응답을 SSIM–깊이 곡선으로 특성화한 연구입니다. 부드러운 투명 고체를 직접 출력해 단일 프린트 사이클로 센서를 완성하고, 압입 실험에서 얻은 SSIM 곡선을 이중 가우시안으로 피팅해 표면/심부 변형을 분리했습니다.
논문 그림 6
가장 중요한 발견은 두 설계 변수가 서로 다른 물리 메커니즘으로 감도를 좌우한다는 것입니다. 핀 길이는 기계적 변형 전달을(핀이 길수록 더 일찍·강하게 SSIM 하락), 유효 젤 두께는 굴절을 통한 광학적 증폭을(젤이 두꺼울수록 겉보기 마커 변위가 커져 감도 상승) 지배하며, 굴절 영향 계수 k = \frac{D_{\text{gel}}-L_{\text{pin}}}{D-L_{\text{pin}}}(1-\frac{1}{n})가 후자를 정량적으로 매개합니다.
로봇공학 실무자 관점의 시사점은 두 가지입니다. 첫째, 제작 단순화와 성능 설계를 동시에 다룰 수 있다는 점입니다. 단일 프린트로 개체 변동을 줄이면서, 핀 길이·젤 두께라는 두 노브로 감도 프로파일을 의도적으로 조형할 수 있습니다. 둘째, 굴절을 버그가 아니라 설계 자원으로 활용한다는 발상입니다. 투명 고체가 만드는 굴절 증폭을 광학 모델로 정량화하면, 물리적 변형을 키우지 않고도 측정 감도를 끌어올릴 수 있습니다.
한계로는 전단/미끄러짐 같은 방향성 자극, 개체 간 재현성의 정량 검증, 외란 환경에서 SSIM의 견고성이 남아 있으며, 이는 향후 후속 연구에서 자연스러운 확장 방향이 될 것입니다.