flowchart TD
subgraph DataGen["A. Dataset Generation (FEM in Isaac Gym)"]
O[Load object] --> G[Load gripper at grasp pose]
G --> C[Close gripper until contact]
C --> F[Ramp grasp force to threshold N]
F --> R[Record 50 frames per run:<br/>node deformation, rigid poses,<br/>stress, finger translation]
end
R --> GR
subgraph Graph["B. Graph Construction"]
GR[Nodes: gripper tetra vertices + object vertices] --> ME[Mesh edges:<br/>neighbor nodes within a body]
GR --> CE[Contact edges:<br/>object node to gripper node]
end
ME --> GNN
CE --> GNN
subgraph Model["C. GNN: Encode-Process-Decode"]
GNN[Encode node/edge features] --> MP[Multiple message-passing rounds]
MP --> DEC[Decode]
DEC --> OUT1[Deformation field]
DEC --> OUT2[Stress field]
end
📃Deformable Tactile Simulation with GNN
tactile
simulation
gnn
Real-Time Simulation of Deformable Tactile Sensors and Objects in Robotic Grasping using Graph Neural Networks with Inductive Biases
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
왜 “촉각 센서 시뮬레이션”이 이렇게 어려운가
로봇이 물건을 집을 때, 손가락 끝에서 무슨 일이 벌어지는지 우리는 사실 거의 모릅니다. 사람은 사과를 쥐면 손끝의 살이 눌리고, 그 눌림의 분포로부터 “이 정도면 안 떨어뜨리겠다”, “더 세게 쥐면 멍들겠다”를 직감적으로 압니다. GelSight 같은 시각 기반 촉각 센서(visual tactile sensor)는 이 직관을 로봇에게 주려는 장치입니다. 부드러운 젤(gel) 표면이 물체에 눌리면 그 변형을 내부 카메라로 찍어 “촉각 이미지”로 만듭니다.
논문 그림 2
문제는 이 센서를 시뮬레이션하는 것이 매우 비싸다는 점입니다. 이 논문은 촉각 시뮬레이션을 두 부분으로 나눕니다.
- 물리(physics): 젤과 물체가 접촉하면서 실제로 어떻게 변형되고, 어디에 얼마나 응력(stress)이 걸리는가.
- 렌더링(rendering): 그 변형으로부터 카메라가 보는 이미지를 만들어내는가.
이 논문은 오직 물리 부분만 다룹니다(렌더링은 범위 밖). 그리고 물리 시뮬레이션 진영은 크게 둘로 나뉩니다.
- 강체(rigid-body) 시뮬레이션: 빠릅니다. 강화학습처럼 대량의 데이터를 뽑아야 할 때 유리합니다. 하지만 젤이 눌리는 전단력(shear)이나 미세 변형을 제대로 못 담습니다. 즉 “현실감”이 떨어집니다.
- 연체(soft-body) 시뮬레이션: 보통 유한요소법(FEM, Finite Element Method)으로 풉니다. 젤과 물체를 작은 사면체(tetrahedron) 요소로 잘게 쪼개고, 각 요소가 받는 힘과 변형을 물리 방정식으로 정밀하게 계산합니다. 현실감은 뛰어나지만, 강체 대비 수백~수천 배 느립니다. 그래서 실시간 제어나 대규모 데이터 생성에는 사실상 못 씁니다.
비유하자면, FEM은 “정답을 알지만 시험 시간이 끝나도록 한 문제도 다 못 푸는 우등생”이고, 강체 시뮬레이션은 “대충 찍어서 빨리 내지만 절반은 틀리는 학생”입니다. 이 논문의 목표는 FEM의 정답을 흉내 내되 강체만큼 빠른 제3의 학생을 만드는 것입니다.
핵심 아이디어 한 줄 요약
FEM으로 정답 데이터를 만들어 두고, 그래프 신경망(GNN)에게 “FEM이라면 어떻게 변형·응력을 줄지”를 학습시킨다. 결과적으로 FEM 대비 10^2 \sim 10^3배 빠르면서도 변형과 응력을 동시에 예측한다.
이 논문의 기여는 다음과 같습니다.
- 시각 촉각 센서 시뮬레이션에 GNN 기반 물리 학습을 처음으로 적용한 연구입니다. (기존 GNN 물리 학습은 변형 물체 자체에 집중했지, 센서를 다루지는 않았습니다.)
- FEM 대비 10^2~10^3배 가속하면서, 학습 때 보지 못한 그립 자세(unseen grasping pose)로도 일반화하는 예측 프레임워크를 제시합니다.
저자는 Centrale Lyon(LIRIS)과 TU Darmstadt(IAS Lab) 연구진(Guillaume Duret, Danylo Mazurak, Frederik Heller, Florence Zara, Jan Peters, Liming Chen)이며, 코드는 tacgraspnets.github.io에 공개되어 있습니다. 본 워크숍 논문은 동일 그룹의 선행 연구 두 편(데이터 생성 파이프라인 TacGraspSim, 그리고 “Inductive Biases” GNN 개선 연구)을 촉각 센서 시뮬레이션으로 확장한 작업입니다.
방법
전체 그림은 “데이터 만들기 → 그래프로 바꾸기 → GNN으로 예측하기”의 3단입니다. 먼저 큰 그림을 보겠습니다.
1단계: FEM으로 정답 데이터 만들기
GNN은 지도학습 모델이므로 “정답”이 필요합니다. 그 정답을 FEM이 만들어 줍니다.
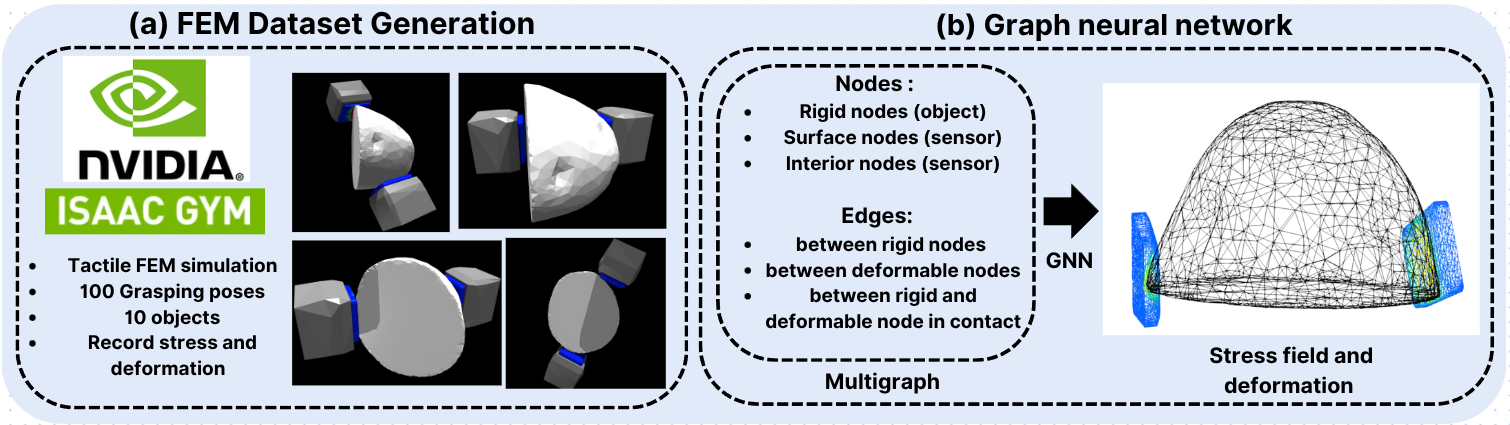
- 시뮬레이터: NVIDIA Isaac Gym(GPU 기반 고성능 물리 엔진) 위에서 FEM을 돌립니다.
- 기반: DefGraspSim(3D 변형 물체의 그립 결과를 FEM으로 시뮬레이션하는 선행 연구)을 가져오되, 정적 그립이 아니라 동적 그립(dynamic grasping) 시나리오로 확장한 자체 파이프라인 TacGraspSim을 씁니다.
- 하드웨어 설정: 평행 그리퍼(parallel gripper)에 GelSight Mini 촉각 센서를 URDF로 모델링해서 붙였습니다.
데이터 한 번 뽑는 절차는 이렇습니다.
- 물체를 불러온다.
- 그리퍼를 그립 위치에 놓는다.
- 접촉할 때까지 그리퍼를 닫는다.
- 그립 힘을 임계값 N까지 서서히 키우면서 데이터를 기록한다.
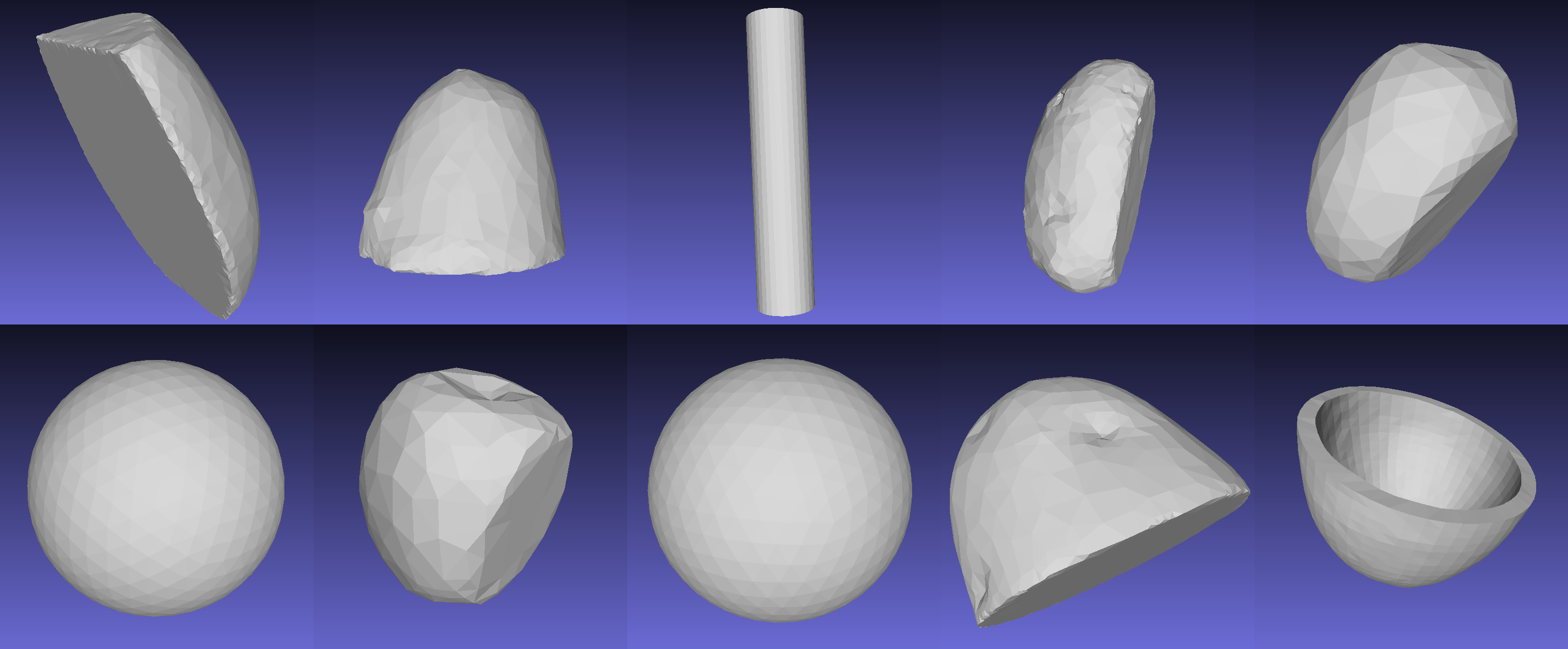
한 번의 실행(run)마다 50프레임을 저장하며, 각 프레임에서 (i) 노드별 변형(node-wise deformation), (ii) 강체 자세(rigid body pose), (iii) 응력 분포(stress distribution), (iv) 그리퍼 손가락 이동량(finger translation)을 기록합니다. 데이터셋은 10종의 물체 × 물체당 100개의 그립 자세로 구성됩니다(사과, 감자, 레몬, 오이, 딸기 등 식료품류 형상).
논문 그림 3
2단계: 메시를 그래프로 바꾸기 — 왜 GNN인가
GNN을 선택한 이유는 직관적입니다. FEM의 메시 자체가 이미 그래프이기 때문입니다.
- FEM은 물체를 사면체 요소들의 그물망으로 잘게 나눕니다. 각 꼭짓점(vertex)은 그래프의 노드(node), 인접 꼭짓점을 잇는 변은 그래프의 엣지(edge)로 자연스럽게 대응됩니다.
- 더 결정적으로, GNN의 메시지 전달(message passing)은 FEM에서 힘이 이웃 요소로 전파되는 과정과 닮았습니다. FEM에서 한 곳을 누르면 그 힘이 인접 요소를 통해 옆으로, 또 옆으로 퍼져 나갑니다. GNN에서 한 노드의 정보가 메시지를 통해 이웃 노드로 퍼지는 것과 구조적으로 동일합니다. 이것이 이 논문이 강조하는 귀납 편향(inductive bias)의 핵심입니다. 즉 “물리적으로 정보가 국소적으로 전파된다”는 사실을 모델 구조에 처음부터 박아 넣은 것입니다.
그래프 구성은 다음과 같습니다.
- 노드: 그리퍼(젤의 사면체 메시 꼭짓점)와 물체 형상의 노드를 모두 포함합니다.
- 두 종류의 엣지:
- 메시 엣지(mesh edge): 한 물체 내부의 이웃 노드를 연결합니다. → “이 몸체는 어떻게 생겼는가”라는 기하 정보를 담음.
- 접촉 엣지(contact edge): 물체 노드와 그리퍼 노드를 연결합니다. → “어디서 닿았고 얼마나 힘이 걸리는가”라는 접촉/힘 정보를 담음.
이렇게 엣지를 둘로 분리한 것 역시 귀납 편향입니다. “물체 내부의 변형 전파”와 “물체-그리퍼 사이의 접촉력”은 본질이 다른 상호작용이므로 다른 엣지 타입으로 구분해 주면 학습이 쉬워집니다.
| 그래프 요소 | 무엇을 담는가 | 물리적 의미 |
|---|---|---|
| 노드(node) | 기하 상태(state), 타입(type), 운동 단서(motion cue) | “이 점은 젤인가 물체인가, 지금 어디 있고 어디로 움직이나” |
| 메시 엣지 | 기하 정보(geometric) | “한 몸체 내부의 이웃 연결 = 형상” |
| 접촉 엣지 | 힘 신호(force) | “물체와 그리퍼가 닿는 곳의 상호작용” |
3단계: GNN 모델 — Encode-Process-Decode
모델은 물리 학습 GNN의 표준 골격인 Encode-Process-Decode 구조를 따릅니다.
- Encode: 각 노드와 엣지의 원시 특징(feature)을 잠재 벡터(latent vector)로 인코딩합니다.
- 노드 특징: 기하 상태 + 노드 타입 + 운동 단서.
- 엣지 특징: 메시 엣지는 기하 정보, 접촉 엣지는 힘 신호.
- Process: 여러 번의 메시지 전달 라운드(multiple message-passing rounds)를 돌립니다. 각 라운드에서 노드는 이웃으로부터 메시지를 모아 자기 상태를 갱신합니다. 라운드를 거듭할수록 정보가 그래프 전체로 퍼져 나가며, 이것이 FEM의 힘 전파를 흉내 냅니다.
- Decode: 최종 노드 표현으로부터 변형(deformation)과 응력(stress)을 동시에 출력합니다.
논문 그림 4
메시지 전달을 직관적인 의사코드로 표현하면 다음과 같습니다(개념 설명용).
# Encode-Process-Decode, conceptual
h_v = encode_node(features_v) for each node v
h_e = encode_edge(features_e) for each edge e (mesh or contact)
for round in 1..K: # multiple message-passing rounds
for each edge e = (u, v):
m_e = edge_update(h_e, h_u, h_v) # build message along the edge
for each node v:
agg = aggregate(m_e for e incident to v)
h_v = node_update(h_v, agg) # update node from neighbors
deformation_v = decode_def(h_v) for each node v
stress = decode_stress(...) # predicted as field over the body이 논문의 모태가 된 선행 연구(“Inductive Biases …” 논문)는 표준 GNN(DefGraspNets)에 두 가지 귀납 편향을 더했습니다. 본 논문은 그 개선판을 기반(baseline)으로 삼습니다.
- 사면체 단위 특징(tetrahedral features): 응력을 꼭짓점(vertex)이 아니라 사면체 요소 자체에서 예측합니다. FEM이 본래 요소 단위로 응력을 계산하므로, 예측을 그 물리 모델에 정렬시켜 더 사실적인 결과를 냅니다.
- 전역 특징 지름길(global feature shortcut): 메시 해상도가 높고 메시지 전달 라운드 수가 적으면, 정보가 그래프 끝까지 못 퍼지는 한계가 생깁니다. 전역 특징은 그래프 전체에 관련된 정보를 곧장 전달하는 지름길 역할을 해 이 문제를 완화합니다.
입력 구성에 대한 절제(ablation): force-only vs. translation
저자는 두 가지 입력 방식을 비교합니다. 이 비교가 결과를 이해하는 데 중요합니다.
- Force-only 입력: 그립 힘만 주고, 모델이 손가락 이동량(translation)과 변형을 둘 다 예측해야 합니다. → 더 어려운 과제.
- Translation 입력: 손가락 이동량을 미리 알려주고, 모델은 변형만 예측합니다. → 더 쉬운 과제.
직관적으로, 손가락이 얼마나 들어갔는지를 알려주면 “그 결과 젤이 어떻게 눌리나”만 풀면 되니 학습이 단순해집니다. 게다가 실제 로봇 제어에서는 위치 명령을 주는 경우가 많으므로, translation 입력 방식이 sim-to-real 전이에도 더 유리하다고 저자는 주장합니다.
실험
설정
- 데이터: 10종 물체 × 100 그립 자세, 실행당 50프레임.
- 정답(ground truth): Isaac Gym FEM 시뮬레이션.
- 평가 지표: 변형 MAE(Mean Deformation MAE)와 응력 MAE(Mean Stress MAE). MAE는 평균 절대 오차로, 예측과 정답의 차이를 절댓값 평균한 값이며 작을수록 좋습니다.
- 실험 단계: (1) 단일 물체 학습 → 같은 형상의 보지 못한 그립 자세로 일반화 검증, (2) 다중 물체 학습 → 물체당 그립 자세의 80%로 학습하고 나머지 20%로 테스트.
결과 1: 단일 물체 — 보지 못한 자세로 일반화
| Class | Translation 입력 | 변형 MAE | 응력 MAE |
|---|---|---|---|
| potato | True | 6.57e-05 | 372.7 |
| potato | False | 2.92e-04 | 382.8 |
| apple | True | 7.20e-05 | 370.5 |
| apple | False | 2.97e-04 | 427.9 |
| lemon | True | 5.40e-05 | 212.1 |
| lemon | False | 2.38e-04 | 265.6 |
(굵은 글씨가 더 좋은 성능. 출처: 논문 Table I.)
해석: translation 입력을 주면 변형 MAE가 한 자릿수(약 4~5배) 줄어듭니다. 예를 들어 감자는 2.92e-04 → 6.57e-05. 응력 오차도 줄지만 변형만큼 극적이지는 않습니다. 즉 “이동량을 알려주는 것”이 변형 예측 난이도를 크게 낮춘다는 직관이 수치로 확인됩니다. 핵심은, 같은 물체라도 학습 때 보지 못한 그립 자세에서 잘 작동했다는 점입니다.
결과 2: 다중 물체 — 형상 간 일반화
| Class | Translation 입력 | 변형 MAE | 응력 MAE |
|---|---|---|---|
| Average | True | 6.30e-05 | 360.3 |
| Average | False | 2.69e-04 | 420.2 |
(10개 물체 평균. 출처: 논문 Table II.)
해석: 10종 물체로 한꺼번에 학습했을 때의 평균 오차가 단일 물체 학습과 거의 같은 범위에 머뭅니다(변형 6.30e-05 vs. 단일 평균 6e-05대). 즉 물체 종류를 늘려도 성능이 무너지지 않고, 여러 형상에 걸쳐 일반화된다는 뜻입니다. 여기서도 translation 입력이 일관되게 더 좋습니다.
논문 그림 5
속도
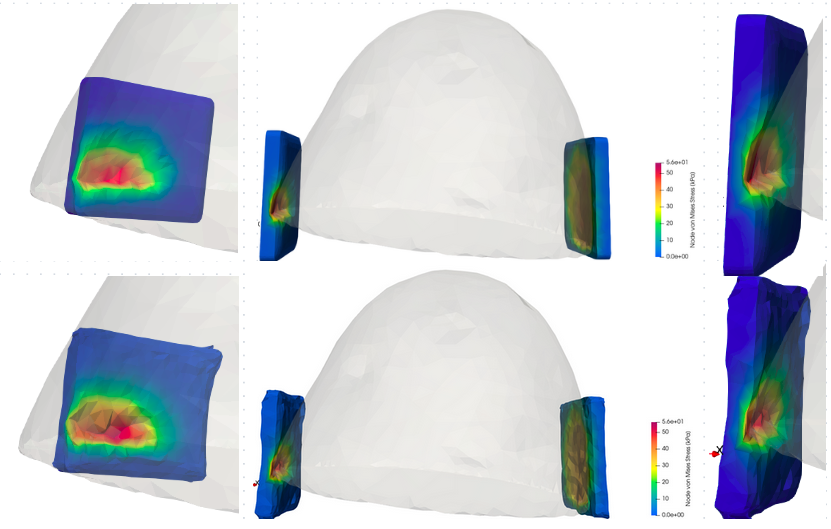
가장 인상적인 결과는 속도입니다. GNN은 FEM 대비 10^2~10^3배 빠릅니다. 정확도는 FEM 정답에 견줄 만한 수준을 유지하면서요. 이 정도면 강화학습용 대규모 데이터 생성, 실시간 폐루프(closed-loop) 촉각 제어, 그립 계획(grasp planning) 같은 곳에 실제로 쓸 수 있는 영역에 들어옵니다.
그림 1(논문)에 대한 설명: 윗줄은 FEM이 계산한 정답 응력·변형, 아랫줄은 GNN 예측을 여러 그립 자세에서 나란히 보여 줍니다. 색으로 칠해진 응력 분포의 위치와 강도가 두 줄에서 시각적으로 거의 일치합니다. “빠르게 뽑은 예측이 정밀 시뮬레이션과 눈으로 봐도 비슷하다”는 것이 핵심 메시지입니다.
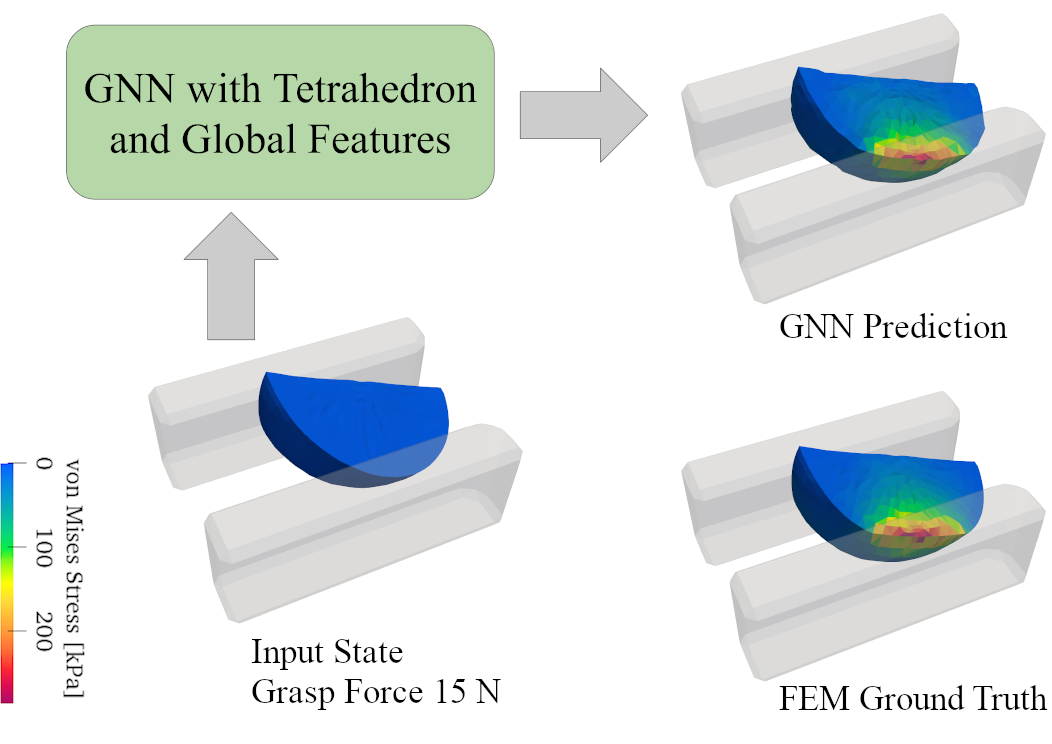
논문 그림 1
비판적 고찰
강점
- 명확한 문제 정의와 깔끔한 발상: “FEM 메시 = 그래프, 힘 전파 = 메시지 전달”이라는 대응은 우아하고, 물리 구조를 모델에 박아 넣는(귀납 편향) 방향이 옳습니다. 데이터에서 모든 것을 짜내려는 무지성 접근보다 표본 효율이 좋을 가능성이 큽니다.
- 변형과 응력을 동시에 예측: 단순 형상 변형뿐 아니라 응력 분포까지 내놓는다는 점이 촉각 응용에서 특히 중요합니다. 응력은 미끄러짐 예측이나 파손 방지(예: 과일이 멍드는지)와 직결됩니다.
- 실용적 입력 설계: translation 입력 방식이 sim-to-real 정렬과 학습 단순화를 동시에 잡는다는 통찰은 실무적으로 가치가 있습니다.
- 재현성: 코드와 데이터 생성 파이프라인을 공개했습니다.
약점·한계
- 새 물체·새 센서로의 일반화는 미검증: 저자 스스로 첫 번째 한계로 인정합니다. 실험은 식료품류 형상 10종에 한정되며, 형상이나 재질이 크게 다른 물체, 혹은 GelSight Mini가 아닌 다른 센서(DIGIT 등)로의 전이는 보여 주지 못했습니다.
- 중력 무시: 현재 구현은 중력 효과를 무시합니다. 동적 그립에서 물체 무게에 따른 힘 분포 변화가 예측에 영향을 줄 수 있는데, 이것이 반영되지 않았습니다.
- 워크숍 단계의 제한된 평가: 베이스라인 비교가 self-baseline(자체 입력 구성 ablation) 중심이고, 외부 방법(예: 강체 시뮬레이션, 다른 학습 기반 촉각 시뮬레이터)과의 직접적 정량 비교는 부족합니다. 속도 10^2~10^3배 역시 측정 조건(메시 해상도, 하드웨어, FEM 솔버 설정)이 본문에 정밀하게 명시되지 않았습니다. (추측) 결과의 일반성을 단정하기에는 표본과 비교군이 좁습니다.
- 응력 MAE 절대값의 해석 여지: 변형 MAE는 translation 입력으로 크게 개선되지만 응력 MAE 개선폭은 상대적으로 작습니다. 응력이 변형보다 본질적으로 학습이 어렵다는 신호일 수 있으며, 응력 정확도가 충분한지는 다운스트림 과제(미끄러짐 감지 등)에서의 검증이 필요합니다.
- 렌더링 미포함: “촉각 이미지”까지 만들어야 진짜 시각 촉각 센서 시뮬레이터입니다. 본 연구는 물리 층까지만이므로, 실제 GelSight 이미지를 쓰는 정책에 바로 꽂으려면 추가 렌더링 단계가 필요합니다.
요약 및 결론
이 논문은 “FEM은 정확하지만 너무 느리다”는 시각 촉각 센서 시뮬레이션의 고질적 병목을, 그래프 신경망으로 FEM을 모사해 푸는 깔끔한 접근을 보여 줍니다. FEM 메시를 그래프로 보고, 메시지 전달을 힘 전파에 대응시키며, 메시 엣지/접촉 엣지 분리와 사면체 단위 응력 예측 같은 물리적 귀납 편향을 심은 것이 핵심입니다.
결과적으로 FEM 대비 10^2~10^3배 빠르면서 변형과 응력을 동시에 예측하고, 보지 못한 그립 자세와 여러 물체 형상에 일반화합니다. 손가락 이동량을 입력으로 주는 방식이 학습을 단순화하고 sim-to-real에도 유리하다는 실용적 관찰도 인상적입니다.
다만 새 물체·새 센서 일반화, 중력 효과, 외부 베이스라인과의 비교, 그리고 렌더링까지 이어지는 end-to-end 파이프라인은 앞으로의 숙제입니다. 그럼에도 실시간 촉각 기반 폐루프 제어와 대규모 데이터 생성이라는, 그동안 FEM 속도에 막혀 있던 응용의 문을 여는 의미 있는 한 걸음입니다.

논문 그림 6
관련 연구와의 위치
- DefGraspNets / DefGraspSim (Huang et al.): 3D 변형 물체의 그립 결과를 GNN/FEM으로 다룬 선행 연구. 본 논문은 그 발상을 촉각 센서(젤)로 확장.
- Inductive Biases GNN (Heller et al., 본 논문의 직접적 baseline): 사면체 특징과 전역 특징 지름길을 도입해 변형/응력 예측을 개선.
- TacSL / Tactile Gym 2.0: 강화학습용 빠른(주로 강체 기반) 촉각 시뮬레이션. 속도는 빠르나 연체 현실감은 부족 — 본 논문이 노린 빈틈.
- TacFlex: 시각 촉각 센서의 촉각 이미지(imprint) 시뮬레이션 — 본 논문이 다루지 않은 렌더링 쪽을 보완하는 위치.