📃DexTouch 리뷰
- Paper Link
- Project Page
- 게재: IEEE Robotics and Automation Letters (RA-L), 2024 — DOI 10.1109/LRA.2024.3478571
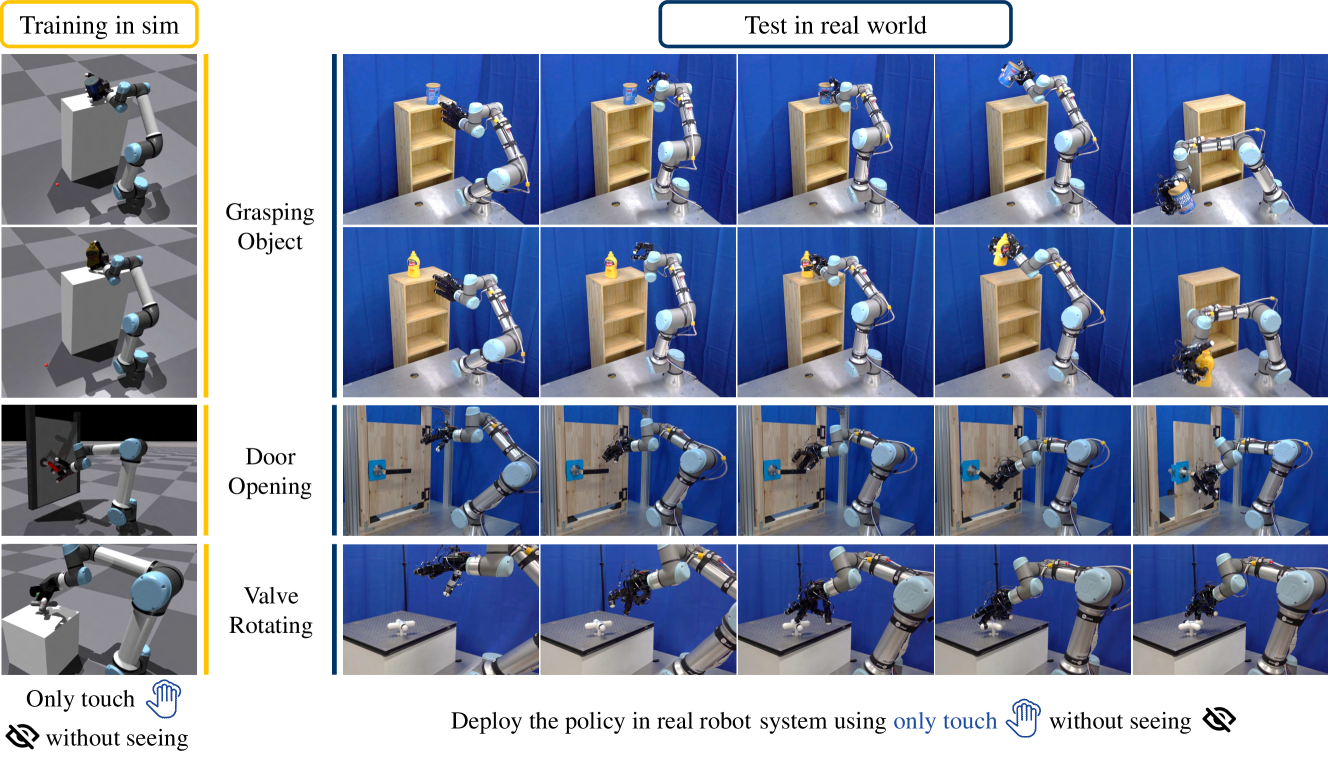
- 🤖 DexTouch는 시각 정보 없이 촉각만으로 어둠 속에 무작위로 놓인 물체를 탐색하고 조작하는 다지(multi-finger) 로봇 시스템을 제안합니다.
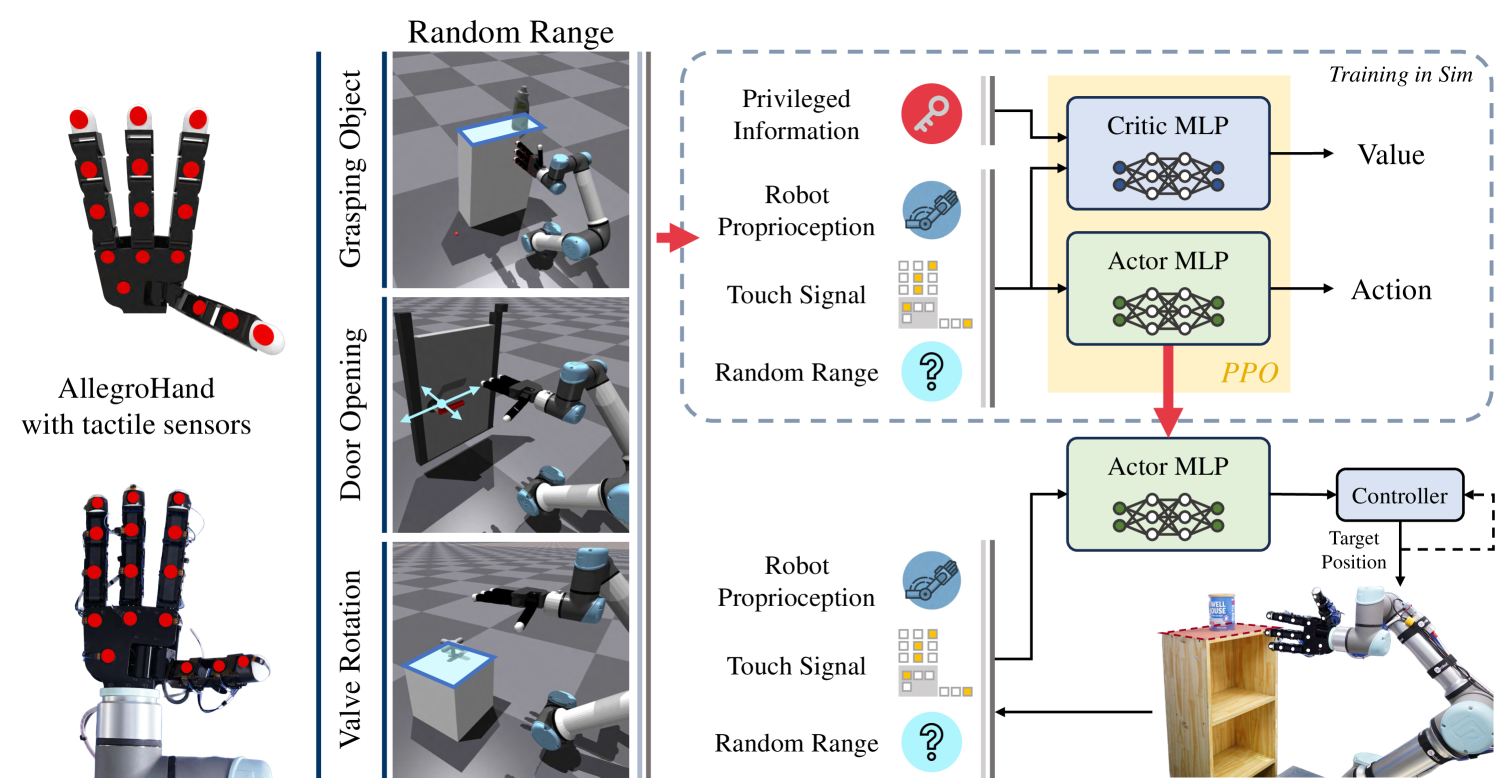
- ✨ UR5e 팔 + AllegroHand(총 22-DoF)에 16개의 이진(binary) 접촉 센서를 부착하고, 시뮬레이션에서 강화학습으로 학습한 정책을 미세조정 없이 실제 로봇으로 전이합니다.
- 🚀 물체 잡기·문 열기·밸브 돌리기 세 가지 일상형 과제에서, 촉각 센서의 민감도·부착 위치가 시각 없는 조작 성능에 결정적임을 실험으로 보여줍니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
DexTouch는 시각 없는 조작(blind manipulation) 문제를 정면으로 다룹니다. 사람은 어두운 방에서도 손을 더듬어 물건을 찾고 다룰 수 있는데, 이는 촉각이 시각의 공백을 메우기 때문입니다. 저자들은 이 능력을 로봇에 부여하기 위해, 6-DoF UR5e + 16-DoF AllegroHand로 구성된 22-DoF 시스템에 손가락마다 3개씩·손바닥에 4개, 총 16개의 FSR(force-sensitive resistor) 접촉 센서를 부착했습니다.
문제 정의: 시각이 제한되는 상황(어둠, 가림, 센서 고장)에서도 로봇이 무작위로 배치된 물체를 촉각만으로 탐색·조작할 수 있는가? 단, 작업의 대략적인 사전 정보(예: 테이블 위에 물체가 있다, 문 손잡이의 대략적 위치)는 주어집니다.
핵심 방법:
- 이진 접촉 신호. 시뮬레이션에서 각 센서의 접촉력 \|F\|를 계산하고 임계값 \tilde{\theta}_{th}=0.01\,\mathrm{N}로 이진화하여, 실제 FSR 센서의 on/off 신호와 동일한 형태로 만듭니다. 이 단순한 표현 덕분에 sim-to-real 격차가 줄어듭니다.
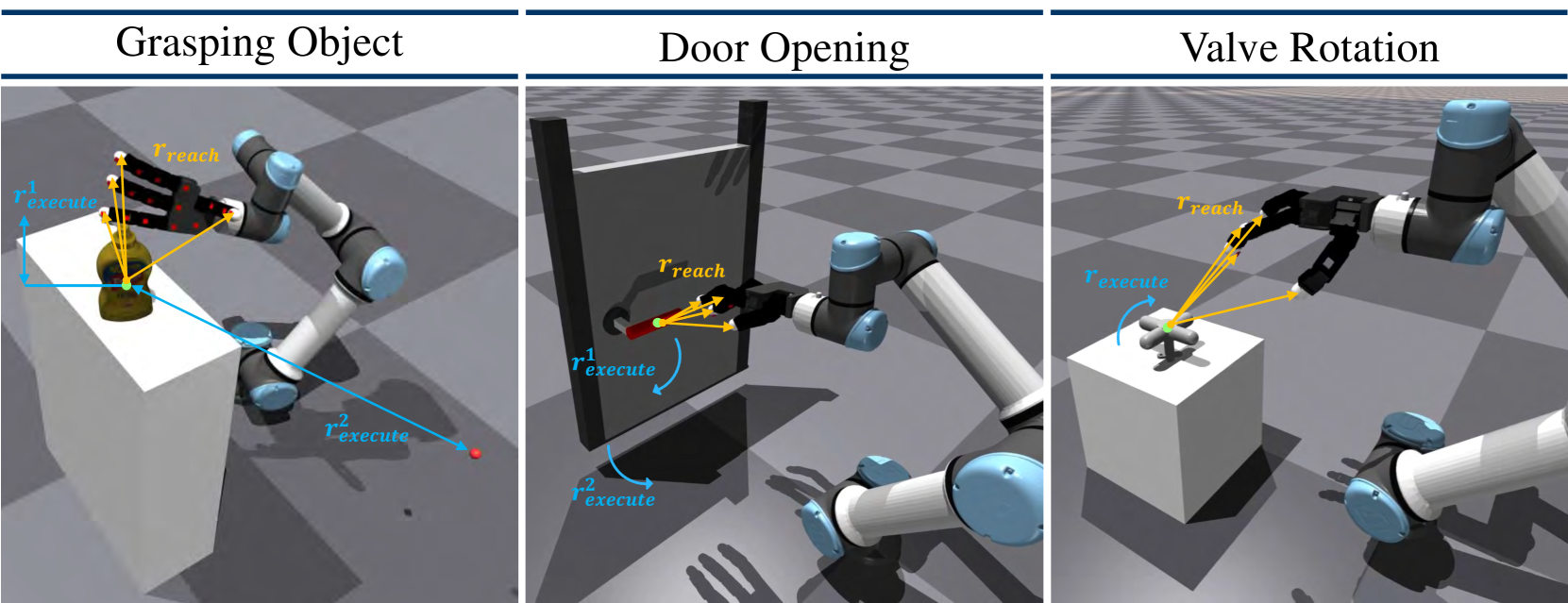
- 2단계 보상 설계. 보상을 도달(reach) 과 실행(execute) 두 국면으로 분해합니다. 손끝과 목표 물체 사이 거리에 기반한 r_{reach}로 먼저 물체를 찾아가게 하고, 과제별 조작 행동에 대한 r_{execute}로 실제 작업을 수행하게 합니다. 또한 목표를 향한 움직임에만 보상을 주어 비효율적 탐색을 억제합니다.
- 비대칭 actor-critic. PPO로 학습하되, 가치(value) 네트워크에만 특권 정보(privileged information, 예: 물체의 실제 위치)를 제공하는 비대칭 관측(asymmetric observation) 을 적용해 학습 효율을 높입니다. 정책(policy)은 촉각·고유수용 정보만 사용합니다.
- IsaacGym 시뮬레이션 → 실제 전이. 10 Hz 제어 주기로 학습한 정책을 추가 학습 없이 실제 로봇에 배포합니다.
성과: 물체 잡기, 문 열기, 밸브 돌리기 세 과제 모두에서 시각 없이 조작에 성공했으며, 촉각 센서의 민감도와 부착 위치가 성능을 좌우함을, 그리고 손목 장착 F/T 센서보다 분산된 촉각 센서가 시각 없는 조작에 유리함을 절제 실험으로 입증했습니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론: 왜 “시각 없는 조작”인가
로봇 조작 연구의 대부분은 카메라(시각)에 의존합니다. 하지만 현실에서 시각은 자주 무력해집니다 — 조명이 꺼진 방, 물체가 가려진 서랍 속, 먼지나 연기가 가득한 환경, 혹은 카메라 자체가 고장 난 상황. 사람은 이런 상황에서도 손의 감각 으로 어렵지 않게 물건을 찾아 다룹니다. 주머니 속 열쇠를 보지 않고 꺼내는 것이 대표적입니다.
DexTouch의 질문은 명확합니다. “대략적인 사전 정보만 주어진 상태에서, 로봇이 오직 촉각만으로 무작위로 놓인 물체를 탐색하고 조작할 수 있는가?” 핵심은 시각이 제공하던 정보(물체의 정확한 위치·자세)를 촉각이 능동적 탐색으로 메우는 것입니다.
시스템 구성
DexTouch의 하드웨어는 다음과 같습니다.
- 로봇: 6-DoF UR5e 팔 + 16-DoF AllegroHand = 총 22-DoF
- 센서: 손가락당 3개 × 4손가락 + 손바닥 4개 = 16개 FSR 접촉 센서
- 신호: 각 센서는 접촉 여부만 알려주는 이진(on/off) 신호 — 풍부한 이미지형 촉각이 아니라 단순 접촉 비트
이 “단순한 촉각”이라는 선택이 중요합니다. GelSight류 고해상도 촉각과 달리, 이진 접촉 센서는 저렴하고 sim-to-real 모델링이 쉽습니다. 시뮬레이션에서는 16개의 가상 접촉 센서로 net contact force F=[F_x, F_y, F_z]의 노름 \|F\|을 계산하고, 임계값 \tilde{\theta}_{th}=0.01\,\mathrm{N}로 이진화하여 실제 FSR과 동일한 신호를 만듭니다.
방법: 강화학습 파이프라인
세 가지 일상형 과제
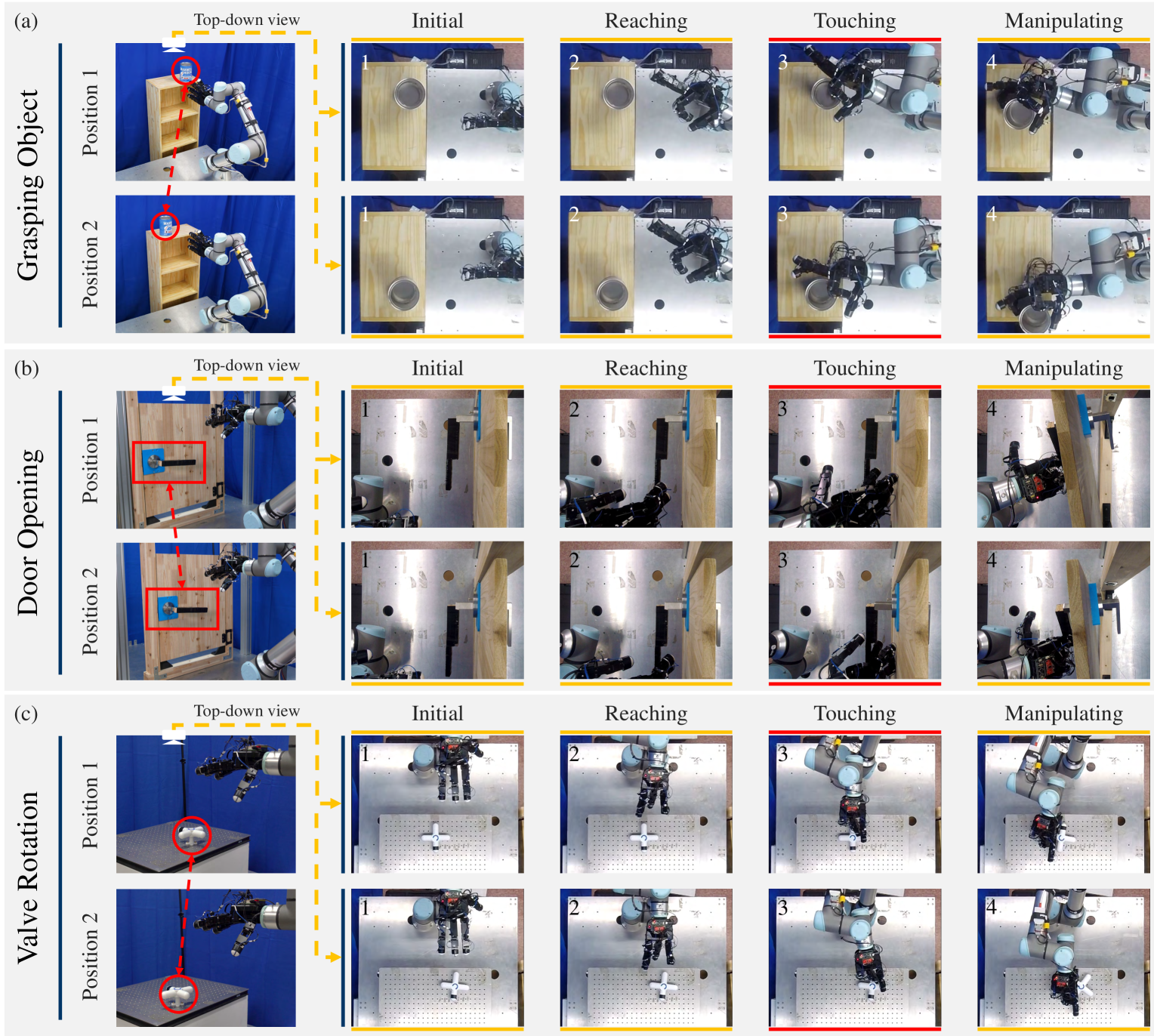
저자들은 일상생활과 관련된 세 가지 벤치마크 과제를 정의합니다.
- 물체 잡기 (Grasping Object) — 테이블 위 무작위 위치의 물체를 더듬어 찾아 집어 올립니다. YCB 데이터셋에서 15개 물체를 선정하고, 그중 7개로 실제 실험을 수행했으며 3개는 학습에 쓰이지 않은 unseen 물체입니다.
- 문 열기 (Door Opening) — 손잡이의 대략적 위치만 알고 문을 엽니다.
- 밸브 돌리기 (Valve Rotating) — 밸브 중심 부근을 더듬어 회전시킵니다.
2단계 보상 함수
접촉이 없으면 보상 신호도 없는 희소(sparse) 문제를 풀기 위해, 보상을 도달과 실행 두 국면으로 나눕니다.
- r_{reach}: 각 손끝과 목표 물체(잡기=테이블 위 물체, 문 열기=손잡이, 밸브=밸브 중심) 사이 거리 d에 기반. 손이 목표에 가까워지도록 유도합니다.
- r_{execute}: 과제 목적을 달성하는 조작 행동(들어 올림, 회전 등)에 대한 보상.
전체 보상은 두 항의 합이며, 목표를 향한 움직임에만 보상을 주도록 설계하여 무의미한 탐색을 줄입니다.

비대칭 관측 PPO
학습은 PPO(clipping \epsilon=0.2, \gamma=0.99, KL 임계값 0.016 등)로 진행됩니다. 핵심 기법은 비대칭 관측(asymmetric actor-critic) 입니다.
- 정책 네트워크(policy): 촉각 이진 신호 + 고유수용(proprioception) 정보만 입력 → 실제 배포 시 사용 가능한 정보만.
- 가치 네트워크(value): 여기에 더해 물체의 실제 위치 같은 특권 정보를 추가 입력.
가치 추정이 정확해지므로 학습 효율이 오르고, 특권 정보는 추론(배포) 시에는 쓰이지 않으므로 시각 없는 실전 조건을 그대로 만족합니다.
실험
IsaacGym에서 10 Hz 제어 주기로 학습한 정책을, 미세조정 없이 실제 UR5e + AllegroHand 시스템으로 전이하여 평가했습니다. 시뮬레이션과 동일하게, 무작위 범위 안에 임의로 놓인 물체에 대한 각 과제의 성공률을 측정합니다.
절제 실험 (Ablation)
DexTouch의 가장 중요한 기여는 “촉각이 왜·어떻게 중요한가”를 분리해서 보여준 절제 실험입니다.
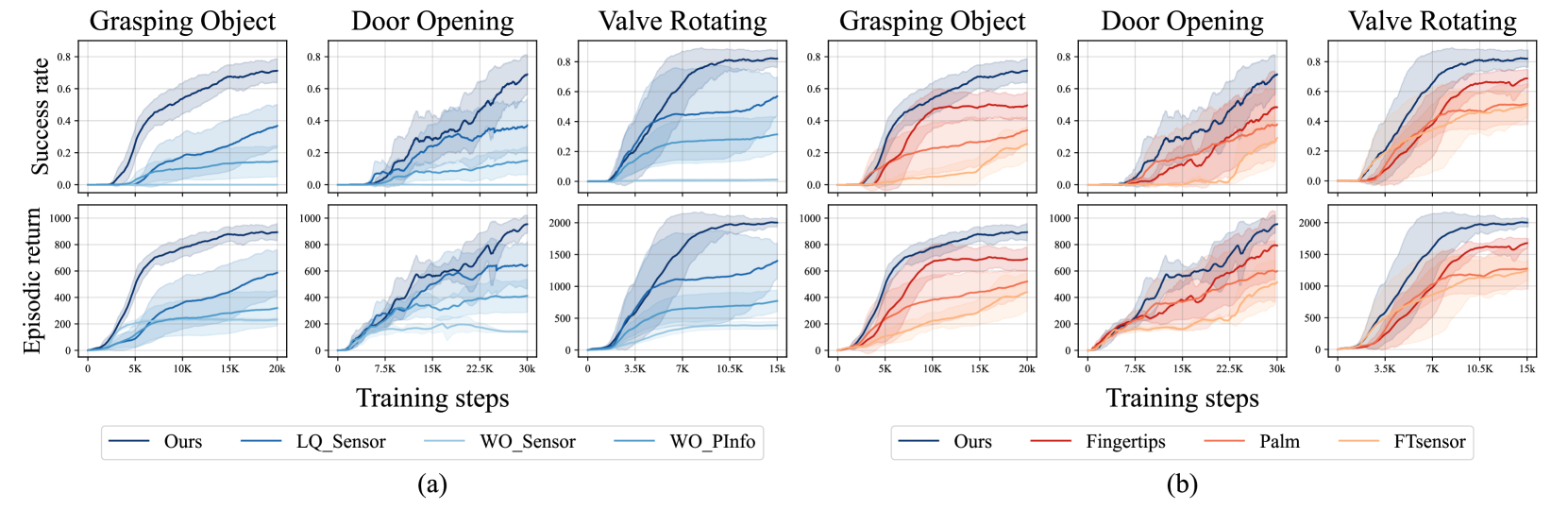
- 촉각 센서의 민감도 (Fig. 4a). 둔감화한 센서 그룹(DA-Sensor)은 성공률이 가장 낮았습니다. 둔감한 촉각에서는 물체를 떨어뜨리는 등 과도한 조작이 관찰되었습니다 — 민감한 촉각이 조작에 핵심임을 시사합니다.
- 센서의 부착 위치 (Fig. 4b). 손끝만 활성화한 그룹(Fingertips)과 손바닥만 활성화한 그룹(Palm)을 각각 4개 센서로 비교했습니다. 손끝 그룹은 손끝을 주로 쓰는 밸브 돌리기에서 우리 정책과 유사한 성공률을 달성했지만, 과제별로 유리한 위치가 달랐습니다 — 분산 배치된 촉각의 이점을 보여줍니다.
- F/T 센서 vs 촉각. 손목 장착 6축 힘/토크(F/T) 센서를 쓰는 그룹과 비교했을 때, 분산된 접촉 촉각이 시각 없는 조작에 더 유리했습니다. F/T 센서는 접촉 위치를 알 수 없어 능동적 탐색에 한계가 있습니다.
관찰
- 비대칭 관측이 학습 효율을 높인다는 일반적 결과를 재확인했습니다.
- unseen 물체 중 텀블러(tumbler) 의 성공률이 가장 낮았는데, 이는 무겁고 표면이 미끄럽기 때문으로 분석됩니다 — 무게·마찰 특성이 촉각 조작 난이도를 결정함을 보여줍니다.
비판적 고찰
강점
- 명확한 문제의식. “시각이 없을 때”라는 현실적 제약을 정면으로 다루고, 촉각의 역할을 절제 실험으로 깔끔하게 분리했습니다.
- 단순한 이진 촉각의 sim-to-real. 고해상도 촉각 없이 이진 접촉 신호 + 임계값 이진화만으로 미세조정 없는 전이를 달성한 점은 실용적입니다.
- 2단계 보상 + 비대칭 관측. 희소 접촉 보상 문제를 도달/실행 분해와 특권 정보 활용으로 안정적으로 해결했습니다.
약점과 한계
- 사전 정보 의존. 완전한 blind가 아니라 “대략적 위치”라는 사전 정보가 필요합니다. 정보가 전혀 없는 탐색으로의 확장은 열린 문제입니다.
- 과제·물체 다양성. 세 과제·소수 YCB 물체에 한정되어, 더 복잡하거나 변형 가능한 물체로의 일반화는 추가 검증이 필요합니다.
- 이진 촉각의 정보량. on/off 신호는 모델링이 쉬운 대신 미끄러짐·질감 같은 풍부한 정보를 담지 못해, 텀블러처럼 미끄러운 물체에서 한계를 보입니다.
요약 및 결론
DexTouch는 시각 없는 조작을, 22-DoF 다지 로봇에 분산 배치한 16개의 이진 촉각 센서와 강화학습으로 풀어낸 연구입니다. 2단계 보상과 비대칭 관측 PPO로 시뮬레이션에서 정책을 학습하고, 미세조정 없이 실제 로봇으로 전이하여 물체 잡기·문 열기·밸브 돌리기를 성공시켰습니다. 무엇보다 촉각의 민감도와 분산 배치가 시각 없는 조작에 결정적이며, 손목 F/T 센서보다 분산 접촉 촉각이 능동적 탐색에 유리하다는 점을 절제 실험으로 분명히 보였습니다. “보지 않고 더듬어 다루는” 능력을 로봇에 부여하려는 방향에서 의미 있는 출발점입니다.
참고 정보
- 논문: Kang-Won Lee, Yuzhe Qin, Xiaolong Wang, Soo-Chul Lim. “DexTouch: Learning to Seek and Manipulate Objects with Tactile Dexterity.” IEEE RA-L, 2024. arXiv:2401.12496.
- 소속: Dongguk University (Seoul) · University of California San Diego
- 프로젝트 페이지: https://lee-kangwon.github.io/dextouch/
- 시뮬레이터: IsaacGym