flowchart TD
A["Soft gripper challenge:<br/>integrate sensing into<br/>a deforming body"] --> B["Inspiration:<br/>elephant trunk TIP<br/>(pinch grasp)"]
B --> C["Hollow soft body<br/>actuated by<br/>NEGATIVE pressure"]
B --> D["Full-surface<br/>tactile feedback"]
C --> E["EleTac gripper"]
D --> F["Single camera at base<br/>sees inner surface"]
F --> E
E --> G["manipulator-as-sensor:<br/>contact + geometry +<br/>proprioception"]
📃EleTac
tactile
soft-robot
gripper
EleTac: Pneumatic Elephant Trunk-Inspired Soft Gripper with Vision-Based Tactile Sensing
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
왜 코끼리 코인가
로봇 그리퍼를 설계할 때 우리는 늘 두 가지 상반된 요구 사이에서 줄다리기를 합니다. 하나는 다양한 형상에 적응해 안전하게 쥐는 능력이고, 다른 하나는 지금 무엇에 어떻게 닿아 있는지를 스스로 느끼는 능력입니다. 부드러운 소프트 그리퍼는 깨지기 쉬운 물체를 다치지 않게 다루는 데 탁월하지만, 복잡한 형태로 변형되는 본질 때문에 센싱 기능을 통합하기가 오랫동안 난제였습니다.
자연은 이 문제를 코끼리 코의 끝부분에서 우아하게 풀어 두었습니다. 코끼리 코끝(trunk tip) 은
- 두 갈래의 돌기로 물체를 집듯이(pinch) 쥐고,
- 표면 전체로 접촉을 느끼며,
- 부드럽게 변형하면서도 동작과 감각을 한 몸에서 동시에 수행합니다.
EleTac은 바로 이 코끝의 집기 동작 + 표면 전체 촉각을 모사한 그리퍼입니다. 제목을 그대로 풀면 Elephant trunk + Tactile입니다. 흥미롭게도, 흔히 떠올리는 “통나무를 감는 강력한 코 전체”가 아니라 코끝의 섬세한 집기에 초점을 맞춘 점이 이 논문의 정체성을 규정합니다.
논문 그림 1
핵심 주장: “조작기가 곧 센서”
저자들이 내세우는 설계 철학은 한 문장입니다 — manipulator-as-sensor. 별도의 센싱 모듈을 덧붙이지 않고, 그리퍼의 몸 그 자체가 고해상도 촉각 센서가 되게 한다는 것입니다.
여기서 EleTac이 기존 비전 기반 촉각 센서(GelSight, GelTip 등)와 결정적으로 다른 지점이 드러납니다. 기존 VBTS는 스스로 움직이지 않는(no intrinsic movement) 센서여서, 외피의 변형은 오직 외부 자극 때문에만 일어납니다. 반면 소프트 그리퍼는 자기 자신의 구동(actuation)에 의한 변형과 외부 접촉에 의한 변형이 동시에 발생합니다. EleTac은 이 둘이 뒤섞인 영상에서 의미 있는 촉각 정보를 뽑아내는 것을 목표로 삼습니다.
방법
1) 그리퍼 설계 — 음압으로 닫히는 속 빈 몸체
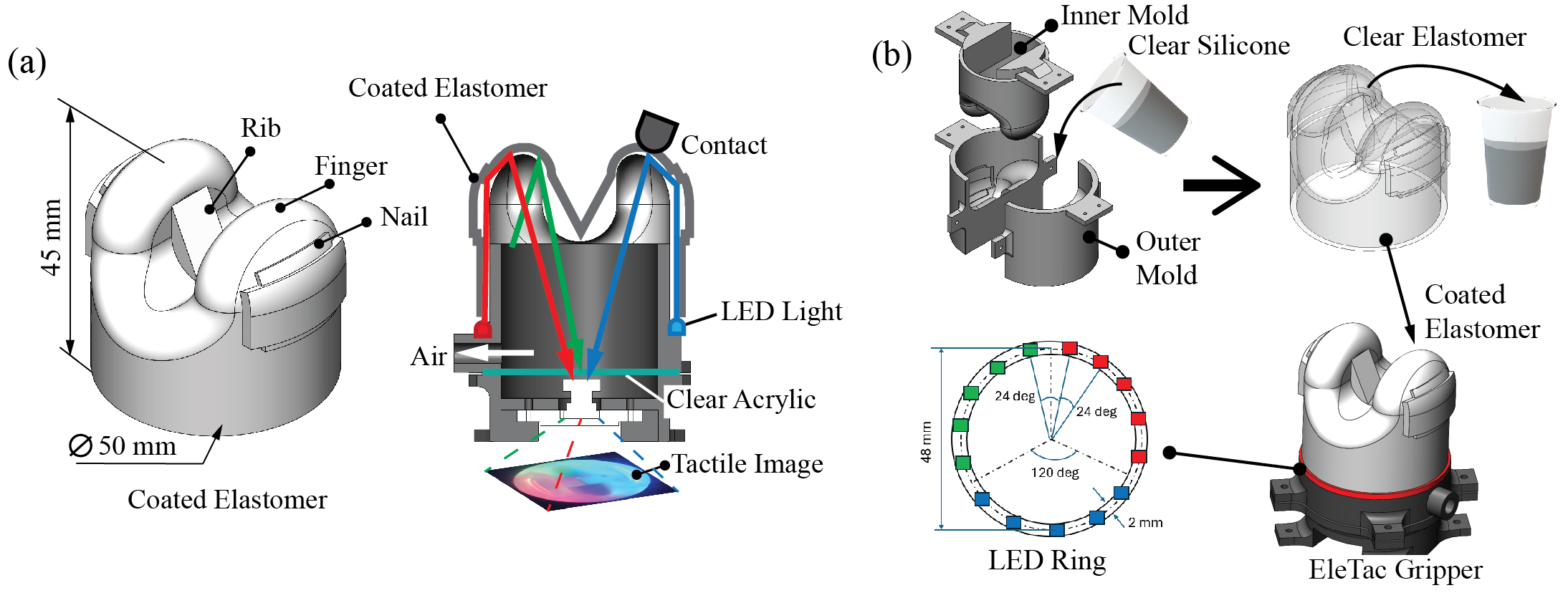
EleTac의 구동 방식은 흔한 예상과 정반대입니다. 공기를 불어넣어 부풀려 휘는 PneuNet 방식이 아니라, 음압(negative pressure) 으로 속을 비워 닫히는 방식입니다. 본체는 속이 빈(hollow) 기하 구조여서, 음압이 걸리면 찌그러지듯 변형하며 두 손가락이 마주 닫히는 집기 동작을 만들어냅니다. 동작은 복잡한 압력 프로파일 없이 on-off 로 단순하게 제어되며, 30 kPa 의 일정한 음압에서 두 손가락이 완전히 닫혀 물체와 완전한 접촉을 형성합니다.
본체는 두 겹의 엘라스토머 층으로 이루어집니다.
| 층 | 재질/특성 | 역할 |
|---|---|---|
| 안쪽 층(inner layer) | 투명 엘라스토머 | 주된 변형과 지지를 담당하며, 카메라가 들여다보는 광학 표면 |
| 바깥쪽 층(outer layer) | 은색(silver) 코팅 | 내부 빛을 반사하고 외부 빛을 차단(광학적 격리) |
광원으로는 빨강·초록·파랑이 고르게 분포된 18개의 LED 링이 엘라스토머 아래에 배치되어 내부를 조명합니다. 카메라는 본체의 베이스(base)에 한 대 놓여, 안쪽 표면 전체를 한눈에 들여다봅니다. 이 단일 카메라가 보는 변형 영상이 모든 촉각 기능의 입력입니다. 이때 카메라가 포착하는 변형은 (i) 구동에 의한 내재적(intrinsic) 변형 과 (ii) 접촉에 의한 외재적(extrinsic) 변형 이 합쳐진 것이라는 점이 핵심입니다.
직관적으로, 음압 구동의 닫힘은 다음과 같은 관계로 이해할 수 있습니다. 챔버 내부 압력 P_{\text{in}} 이 외부 대기압 P_{\text{atm}} 보다 낮아지면, 그 차이만큼의 알짜 힘이 벽을 안쪽으로 끌어당깁니다.
\Delta P = P_{\text{atm}} - P_{\text{in}} \quad\Rightarrow\quad F_{\text{close}} \;\propto\; \Delta P \cdot A_{\text{wall}}
여기서 A_{\text{wall}} 은 압력차가 작용하는 유효 벽 면적입니다. EleTac은 \Delta P \approx 30~\text{kPa} 의 단일 동작점에서 손가락을 완전히 닫습니다.
논문 그림 2
2) 촉각 센싱 — 세 가지 기능, 세 가지 학습 모델
EleTac은 하나의 카메라 영상으로부터 서로 다른 세 가지 촉각 기능을 학습 기반으로 복원합니다. 각각 별도의 데이터셋과 네트워크를 사용합니다.
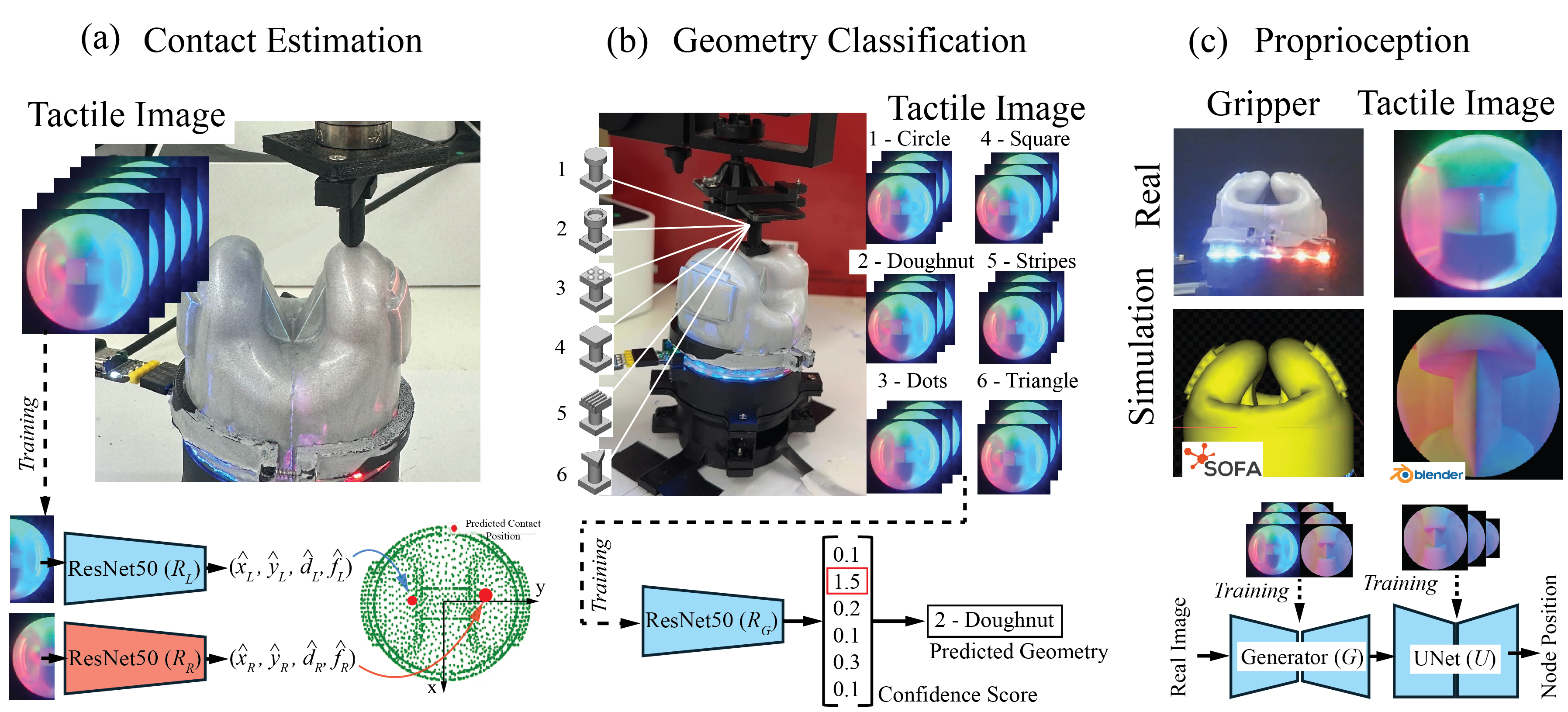
(a) 접촉 추정 (Contact Estimation)
알려진 자극을 가해 정답을 만드는 고전적 지도학습입니다. Nano17 힘 센서에 반구형 인덴터(hemispherical indenter) 를 달아 Dobot Magician 로봇 팔의 엔드이펙터에 장착하고, 두 손가락 각각에 수직으로 눌러 데이터를 수집했습니다. 그 결과 2,536장의 촉각 영상을 모았고, 각 영상은 다음 정답 벡터와 짝지어집니다.
\mathbf{y} = \big(x,\; y,\; d,\; f\big)
- (x, y): 2차원 인덴테이션 위치
- d: 인덴테이션 깊이(indentation depth)
- f: 접촉력(contact force)
즉 영상 한 장에서 어디를, 얼마나 깊게, 얼마의 힘으로 눌렀는지를 회귀하는 심층 신경망을 학습합니다.
(b) 형상 분류 (Geometry Classification)
여섯 가지 서로 다른 머리 형상의 인덴터로 각 손가락을 눌러 접촉 영상을 모았습니다. 형상은 원(circle), 도넛(doughnut), 점들(dots), 사각형(square), 줄무늬(stripes), 삼각형(triangle) 의 6종이며, 데이터셋은 2,016장의 영상과 라벨로 구성됩니다. 접촉면의 텍스처 패턴을 보고 어떤 형상에 닿았는지를 분류하는 문제입니다.
(c) 고유수용감각 (Proprioception) — 시뮬레이션 기반 하이브리드 프레임워크
가장 정교한 부분입니다. “지금 손가락이 어떤 자세(posture)인가”를 촉각 영상만으로 추정하는데, 정답을 일일이 측정하기 어렵다는 문제가 있습니다. 저자들은 시뮬레이션 기반 데이터 생성 + 도메인 간 영상 변환 + 학습 기반 위치 회귀를 결합한 하이브리드 프레임워크를 제안합니다.
- 실제 그리퍼의 여닫는 동작 중 촉각 영상을 촬영해 실제 자세 데이터를 모읍니다.
- SOFA 프레임워크로 FEM 모델을 만들어 같은 여닫기 동작을 재현합니다.
- SOFA 시뮬레이션이 생성한 메시를 바탕으로 Blender로 합성 촉각 영상을 렌더링합니다.
- 실제와 시뮬레이션 양쪽에서 150개의 서로 다른 손가락 자세를 수집해 150쌍의 영상을 얻습니다.
- 이 데이터로 고유수용감각용 U-Net 과, 합성-실제 도메인 간극을 메우는 CycleGAN 의 생성기 네트워크를 학습합니다.
여기서 CycleGAN의 역할이 직관적으로 중요합니다. 시뮬레이션으로 만든 영상은 실제 카메라 영상과 미묘하게 달라(sim-to-real gap), 그대로 학습하면 실제에서 성능이 떨어집니다. CycleGAN은 짝이 맞지 않는(unpaired) 두 도메인의 영상을 서로 번역해 이 간극을 메웁니다. 개념적으로 다음 순환 일관성을 만족하도록 학습합니다.
G_{\text{sim}\to\text{real}}(x_{\text{sim}}) \approx x_{\text{real}}, \qquad G_{\text{real}\to\text{sim}}\big(G_{\text{sim}\to\text{real}}(x_{\text{sim}})\big) \approx x_{\text{sim}}
즉 시뮬레이션 영상을 실제처럼 바꾸되, 다시 되돌렸을 때 원본으로 복원되도록 강제해 의미가 보존되게 합니다.
flowchart LR
subgraph Actuation
P["Negative pressure<br/>30 kPa on-off"] --> CL["Two fingers close"]
end
subgraph DataGen["Proprioception data"]
REAL["Real images<br/>(open/close motion)"]
SOFA["SOFA FEM mesh"] --> BL["Blender render<br/>synthetic images"]
end
CAM["Single base camera"] --> IMG["Tactile image"]
IMG --> NET1["DNN: contact<br/>x,y,d,f"]
IMG --> NET2["Classifier:<br/>6 geometries"]
BL --> CG["CycleGAN<br/>sim-to-real"]
REAL --> CG
CG --> UNET["U-Net:<br/>proprioception"]
IMG --> UNET
NET1 --> CTRL["Real-time<br/>tactile control"]
UNET --> CTRL
의사코드: 촉각 영상에서 행동까지
function ELETAC_PERCEIVE(frame):
img = capture(camera_at_base) # single global view
x, y, d, f = contact_net(img) # regression
shape = geometry_classifier(img) # 6-class
posture = unet_proprioception(img) # finger pose
return Contact(x, y, d, f, shape, posture)
function EXCAVATE(sand_surface):
for probe in scan_grid(sand_surface):
c = ELETAC_PERCEIVE(probe)
if classify_contact(c) == OBJECT: # object vs sand
hits.append(probe.position)
pose = cluster(hits) # estimate pos + orientation
align_and_grasp(pose)실험
파지 성능
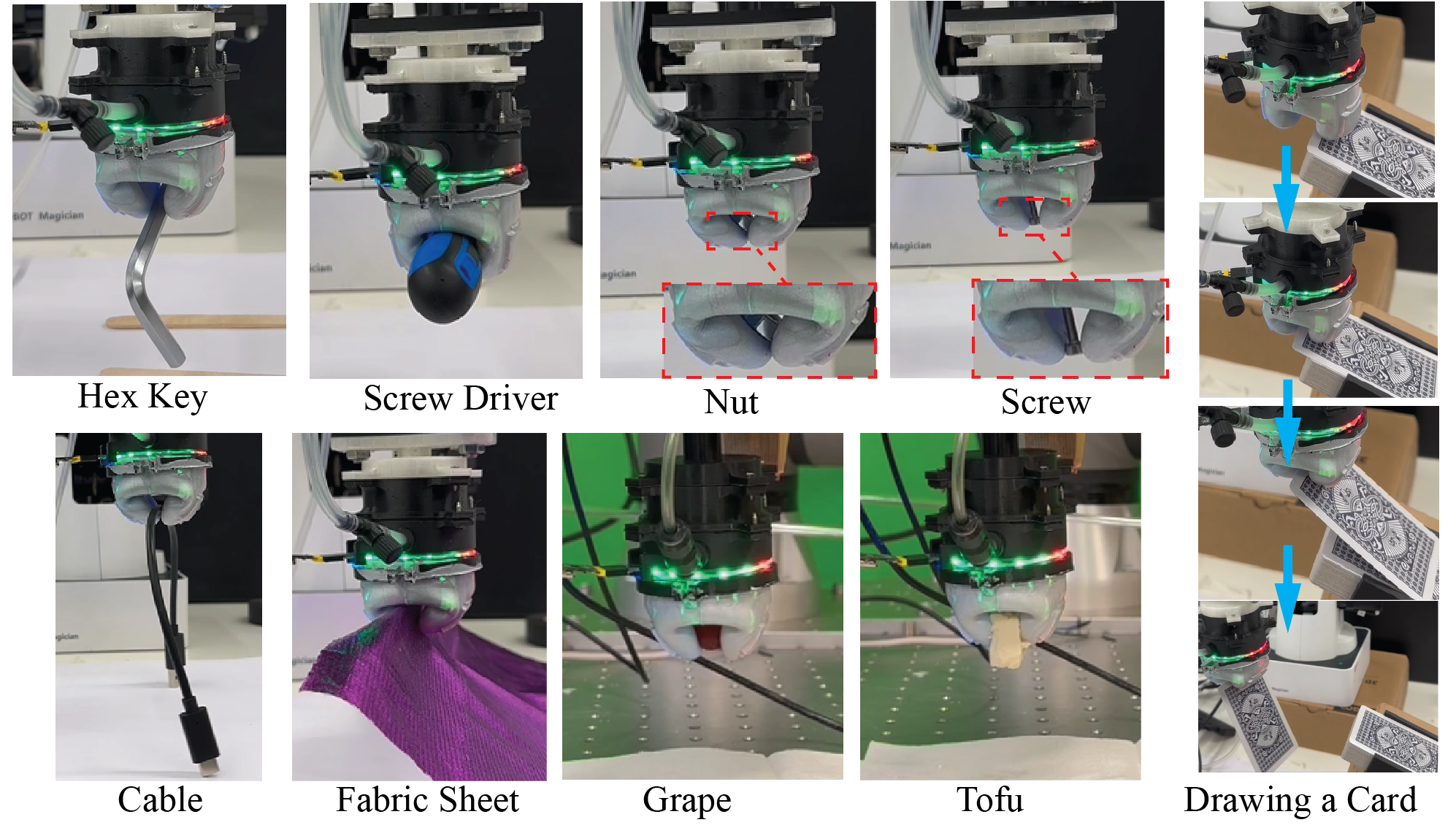
EleTac은 다양한 크기와 형상의 물체를 로봇 팔(Dobot Magician 또는 UR5e)에 장착된 상태로 성공적으로 집어 들어 올렸습니다. 정량적으로, 포스터의 Table 1 요약에 따르면 EleTac은 작고 가벼운 물체에 적합하며, 최대 약 45.9 g까지 파지 가능합니다. 이는 코끼리 코끝을 모사한 섬세한 집기에 초점을 둔 설계라는 점과 일관됩니다 — 무거운 물체를 감아 드는 트렁크 전체가 아니라 정밀한 끝단 집기인 것입니다.
촉각 센싱 정확도
포스터에 보고된 핵심 정량 수치는 다음과 같습니다.
| 기능 | 지표 | 결과 | 조건 |
|---|---|---|---|
| 접촉 위치 추정 | 평균 위치 오차 | 2.36 mm | 인덴테이션 깊이 > 4 mm |
| 형상 분류 | 평균 정확도 | 81.67 % | 인덴테이션 깊이 > 4 mm |
| 고유수용감각 | 평균 오차 | 2.87 mm | — |
여기서 주목할 점은 두 가지입니다. 첫째, 위치/형상 성능이 “깊이 > 4 mm” 라는 단서를 달고 보고된다는 사실입니다. 즉 접촉이 충분히 깊어 외피 변형이 뚜렷할 때 성능이 보장되며, 얕은 접촉에서는 신호가 약해 성능이 떨어질 수 있음을 시사합니다(구동 변형과 접촉 변형이 섞이는 EleTac의 본질적 난제와 직결됩니다). 둘째, 형상 분류 81.67%는 6클래스 문제에서 무작위(약 16.7%)보다 훨씬 높지만, 완벽과는 거리가 있어 형상 식별이 가장 어려운 기능임을 보여줍니다.
논문 그림 3
응용 1: 모래 속 물체 발굴(Excavation)
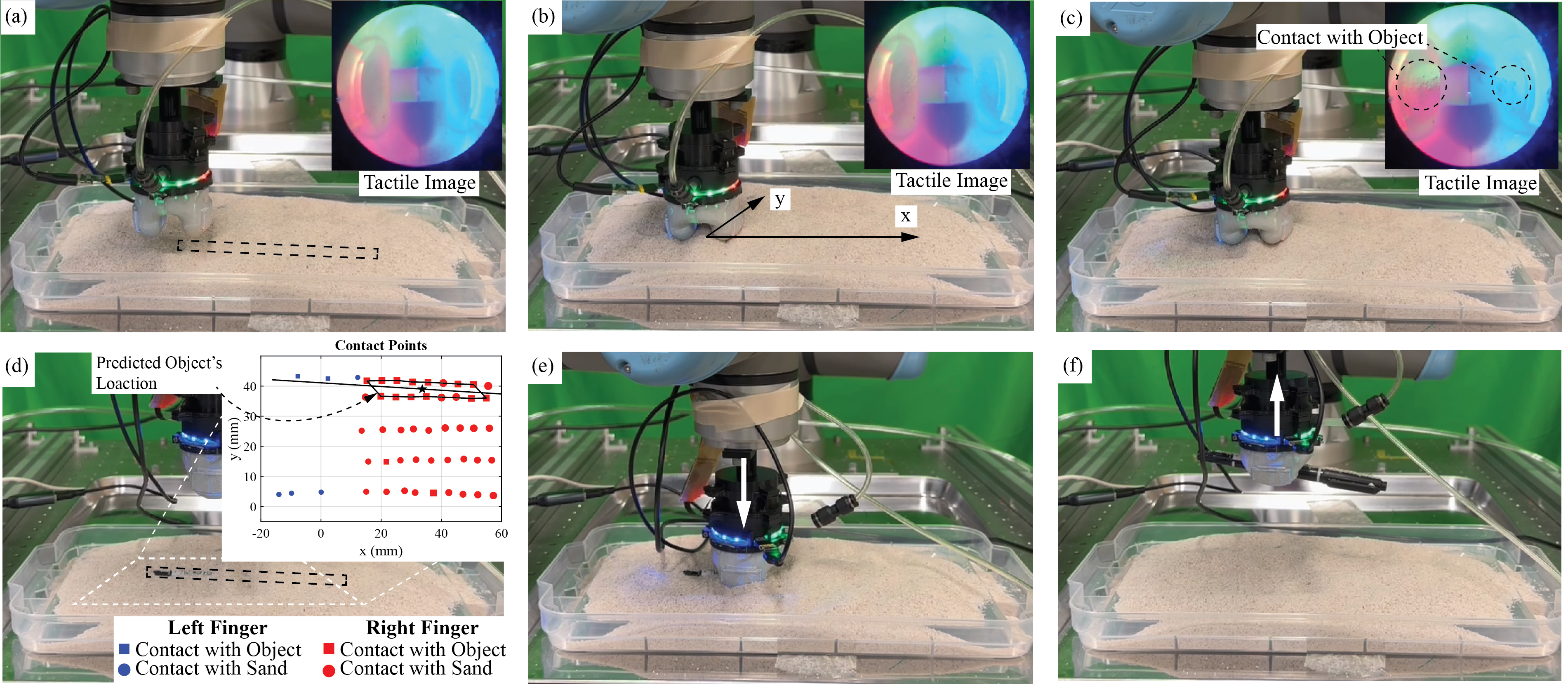
EleTac을 UR5 팔에 장착하고, 오직 촉각 피드백만으로 모래에 묻힌 가늘고 긴 물체를 찾아 꺼내는 과제를 수행했습니다. 대상은 직경 10 mm의 펜으로, 어린이용 놀이 모래 약 3~5 mm 아래에 묻혀 있었습니다. 절차는 다음과 같습니다.
- 그리퍼가 모래 표면 위를 탐침(probing)하며 촉각 신호를 수집.
- 분류 네트워크가 모래와의 접촉 vs 물체와의 접촉을 구분.
- 클러스터링으로 물체의 위치와 방향(orientation) 을 추정.
- 그리퍼를 정렬해 파지·발굴.
이 실험은 EleTac이 단순히 정적 인식기가 아니라, 촉각만으로 환경을 능동 탐색하는 햅틱 탐색(haptic-exploratory) 행동을 할 수 있음을 보여줍니다(영상의 모래/물체 접촉 패턴 차이가 분류의 단서가 됩니다).
논문 그림 4
응용 2: 적응형 표면 추종(Surface-Following) 청소
EleTac이 스펀지를 쥐고, 다양한 식기 표면 위를 이동하며 그려진 빨간 선을 닦는 청소 과제입니다. 핵심은 고유수용감각 기능으로 그리퍼의 높이를 추정하고, 이를 UR5 팔의 제어 피드백으로 사용해 곡면(얕은 접시·깊은 접시)에서도 스펀지와 표면 사이의 적절한 접촉을 유지한 점입니다. 그리퍼 스스로의 자세 감각이 곧 외부 표면과의 접촉 유지를 가능케 한다는, “manipulator-as-sensor” 철학의 실용적 예시입니다.
비판적 고찰
강점
- 동작과 감각의 진정한 통합: 별도 센서 모듈 없이 카메라 한 대로 접촉(x,y,d,f), 형상, 고유수용감각의 세 기능을 모두 복원합니다. 크게 변형되는 소프트 본체에 전자식 촉각 배열을 붙이는 내구성·배선 악몽을 단일 카메라로 우회한 점이 우아합니다.
- 구동 변형과 접촉 변형의 공존 문제를 정면으로 다룸: 기존 VBTS가 “움직이지 않는 센서”였던 데 반해, EleTac은 자기 구동 변형이 섞인 영상에서 촉각을 뽑는 더 어려운 문제를 학습으로 풉니다.
- 시뮬레이션 기반 데이터 생성의 영리함: 정답 측정이 어려운 고유수용감각을 SOFA(FEM) + Blender(렌더링) + CycleGAN(sim-to-real)으로 해결해, 단 150쌍의 데이터로 자세를 추정합니다.
- 실제 응용 시연: 모래 발굴, 표면 추종 청소처럼 촉각·고유수용감각을 실제 제어 루프에 넣은 데모가 설득력을 더합니다.
약점·한계
- 파지 페이로드가 매우 작음: 최대 약 45.9 g로, 가볍고 작은 물체에 국한됩니다. 코끼리 “코끝”의 섬세함은 살렸지만 코 전체의 강력함은 없습니다. 일반 매니퓰레이션으로의 일반화에는 제약이 큽니다.
- 얕은 접촉에서의 성능 저하 시사: 핵심 지표들이 “깊이 > 4 mm” 조건에서 보고됩니다. 가벼운 접촉이나 미세 슬립 감지처럼 얕은 변형 영역의 성능은 불확실합니다.
- 형상 분류 81.67%: 6클래스 기준으로 실용엔 더 개선이 필요하며, 저자들도 future work로 “센싱 정확도 개선”을 명시합니다.
- 데이터 규모와 동작점의 협소함: 고유수용감각 데이터가 150쌍으로 작고, 구동이 30 kPa on-off 단일 동작점입니다. 연속적인 힘 조절이나 다양한 압력 영역에서의 일반화는 검증되지 않았습니다.
- 공압 시스템 공통 한계: 외부 펌프·튜브가 필요해 시스템이 무겁고, 동적 조작 속도에 제약이 있을 수 있습니다.
- 워크숍 단신 분량: 짧은 페이퍼 특성상 대규모 정량 평가나 장기 내구성 데이터는 제한적입니다.
관련 연구 비교
EleTac의 위치를 기존 비전 기반 촉각/소프트 그리퍼 연구 속에서 정리하면 다음과 같습니다(논문 인용 및 공개 자료 기준).
| 시스템 | 구조/영감 | 구동 | 변형의 원천 | EleTac과의 차이 |
|---|---|---|---|---|
| EleTac (본 논문) | 코끼리 코끝 | 음압 공압(30 kPa) | 구동 + 접촉 (둘 다) | 움직이는 본체에서 촉각·고유수용감각 통합 |
| GelSight [3] | 강체 핑거팁 | 없음(고정) | 접촉만 | 강체·소형, 자기 변형 없음 |
| GelTip [4] | 손가락형 광학 센서 | 없음(고정) | 접촉만 | 곡면 핑거형이나 비구동 센서 |
| ConTac [5] (저자 그룹) | 연속체 모사 소프트 팔 | 구동형 | 구동 + 접촉 | EleTac의 직접적 기술 계보(형상·접촉 인지) |
핵심 대비는 명확합니다. GelSight·GelTip 같은 고전 VBTS는 스스로 움직이지 않는 센서라 외피 변형이 곧 접촉을 의미합니다. EleTac은 스스로 닫히며 변형하는 그리퍼이므로, 영상 속 변형에서 “내 구동 때문인지, 물체 접촉 때문인지”를 학습으로 분리해야 합니다. 저자 그룹의 선행 연구 ConTac이 연속체 소프트 팔에서 형상·접촉 인지를 다룬 계보 위에서, EleTac은 이를 코끼리 코끝형 집기 그리퍼로 가져오고 고유수용감각까지 결합한 셈입니다.
요약 및 결론
EleTac은 코끼리 코끝의 섬세한 집기 동작과 표면 전체 촉각을, 음압으로 닫히는 속 빈 소프트 본체와 베이스에 놓인 단일 카메라로 한 몸에 담은 그리퍼입니다. 핵심을 한 문장으로 요약하면 다음과 같습니다.
스스로 움직이며 변형하는 그리퍼의 몸 자체가 고해상도 촉각 센서가 되어, 별도 센싱 모듈 없이 접촉(위치·깊이·힘)·형상·고유수용감각을 동시에 복원한다(manipulator-as-sensor).
정량적으로는 접촉 위치 오차 2.36 mm, 형상 분류 81.67%(이상 깊이 > 4 mm 조건), 고유수용감각 오차 2.87 mm, 파지 페이로드 최대 45.9 g 를 보고합니다. 페이로드와 정확도 모두 아직 초기 단계지만, 이 연구의 가치는 절대 수치보다 구동과 감각이 한 몸에서 공존하는 영상을 학습으로 해석해 실제 제어 루프(모래 발굴·표면 추종)에 넣었다는 통합의 완성도에 있습니다. SOFA FEM과 Blender 렌더링, CycleGAN을 엮어 작은 데이터로 고유수용감각을 학습한 점은 소프트 로봇 촉각 연구의 데이터 병목을 푸는 실용적 레시피로도 읽힙니다.
저자들은 향후 과제로 센싱 정확도 개선과 전체 길이의 코끼리 코 로봇 개발을 제시합니다. 즉 이번 EleTac이 “코끝”이라면, 다음 목표는 “코 전체”인 셈입니다.
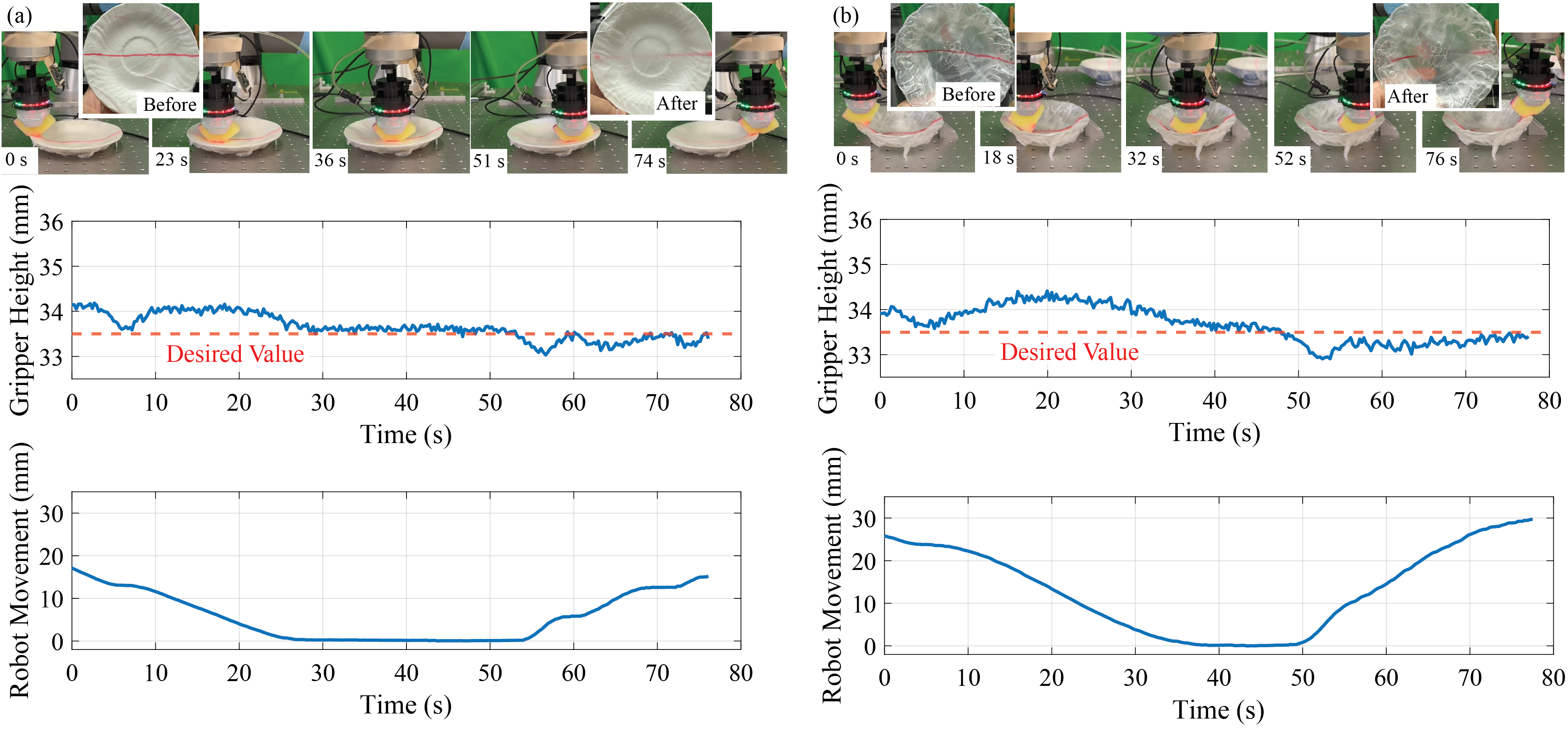
논문 그림 5