flowchart LR
subgraph GEN["1 Data Generation"]
A[Isaac Sim + TacEx<br/>IPC physics] --> B[Closed-loop grasp APIs]
B --> C[Synced ground truth:<br/>images, depth, markers, pose]
end
subgraph LEARN["2 Representation Learning"]
D[UniVTAC Encoder<br/>ResNet-18 backbone]
D --> E[Shape head]
D --> F[Contact head]
D --> G[Pose head]
end
subgraph BENCH["3 Benchmarking"]
H[8 manipulation tasks]
H --> I[Physics-based<br/>success criteria]
end
C -->|205,826 samples| D
D -->|shared encoder only| H
📃UniVTAC
tactile
simulation
benchmark
UniVTAC: A Unified Simulation Platform for Visuo-Tactile Manipulation Data Generation, Learning, and Benchmarking
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
로봇이 USB를 꽂거나, 시험관을 좁은 구멍에 끼우거나, 매끄러운 병을 미끄러뜨리지 않고 들어 올리는 일은 사람에게는 너무나 자연스럽지만 로봇에게는 여전히 까다로운 과제입니다. 이런 접촉이 많은(contact-rich) 조작은 시각만으로 풀기가 어렵습니다. 그 이유는 직관적입니다. 손가락(엔드이펙터)이 물체를 잡는 순간, 정작 중요한 접촉면은 그 손가락에 가려져 카메라에 보이지 않습니다(occlusion). 또한 카메라는 가까운 거리에서 깊이(depth)를 정확히 추정하기 어렵습니다. 즉, “마지막 1 mm”의 정밀한 정렬이 필요한 순간에 시각 정보는 오히려 가장 빈약해집니다.
이 빈 곳을 메우는 것이 촉각(tactile) 센서입니다. 특히 GelSight 류의 시각-촉각(visuo-tactile) 센서는, 부드러운 젤 패드가 물체에 눌릴 때 생기는 변형을 내부 카메라로 촬영해 “접촉면을 찍은 사진”으로 바꿔 줍니다. 젤 표면에 인쇄된 마커(marker) 점들의 움직임을 보면 전단력(shear force)과 미끄러짐까지 읽어낼 수 있습니다. 마치 사람이 눈을 감고도 손끝의 감각만으로 열쇠 구멍을 더듬어 찾는 것과 같은 능력을, 로봇에게 카메라 한 대로 부여하는 셈입니다.
문제는 데이터입니다. 딥러닝 기반 조작 정책을 학습하려면 대량의 촉각 데이터가 필요한데, 실제 세계에서 촉각 데이터를 모으는 일은 비쌉니다. 부드러운 젤 패드는 마모되고 손상되기 쉬우며, 매 상호작용마다 “물체가 센서에 대해 정확히 어떤 자세였는가” 같은 정답(ground truth)을 자동으로 얻기가 거의 불가능합니다. 게다가 GelSight Mini, ViTai GF225, Xense WS처럼 센서마다 광학·기계적 특성이 제각각이라, 한 센서에서 모은 데이터나 한 연구의 평가 방식이 다른 환경으로 잘 이어지지 않습니다. 통일된 평가 플랫폼의 부재가 분야 전체의 발전을 가로막고 있다는 것이 저자들의 진단입니다.
UniVTAC(Unified Visuo-TACtile)는 이 세 가지 문제를 하나의 통합 시뮬레이션 플랫폼으로 정면 돌파합니다. 한 문장으로 요약하면, “시뮬레이터 안에서 대규모 촉각 데이터를 안전하고 통제 가능하게 생성하고(Data Generation), 그것으로 촉각 중심 인코더를 사전학습하며(Learning), 표준화된 8개 과제로 정책을 평가한다(Benchmarking)”는 것입니다.
참고: 본 리뷰는 arXiv 공개본(arXiv:2602.10093, HTML v1)을 확보하여 작성했습니다. 워크숍 페이지의 PDF/포스터 링크(
vitac2026/.../2.pdf)는 작성 시점에 404로 접근되지 않아, arXiv 원문에서 수치와 기술 세부를 가져왔습니다. 본 논문은 워크숍 발표 형식이라 일부 구현 세부는 간략히 기술되어 있으며, 추론이 들어간 부분은 본문에 “(추측)”으로 표시했습니다.
UniVTAC의 세 기둥을 그림으로 보면 다음과 같습니다.

논문 그림 1
방법
UniVTAC는 크게 세 부분으로 구성됩니다. (1) 촉각 데이터를 생성하는 시뮬레이션 플랫폼, (2) 그 데이터로 학습하는 UniVTAC 인코더, (3) 정책을 평가하는 벤치마크. 차례로 직관과 함께 살펴보겠습니다.
논문 PDF — p.1
시뮬레이션 플랫폼: “찍히기 전에 부서지지 않게”
UniVTAC는 NVIDIA Isaac Sim 위에서 동작하며, 그 토대로 TacEx 프레임워크를 확장합니다. TacEx는 libuipc 물리 라이브러리와 Isaac Sim을 결합한 것으로, 핵심 물리 엔진은 IPC(Incremental Potential Contact) 방식을 씁니다.
IPC를 직관적으로 이해하면, 두 물체가 서로를 “절대 뚫고 지나가지 못하도록” 수학적으로 보장하는 접촉 모델입니다. 일반적인 강체 시뮬레이터는 물체가 살짝 겹쳤다가 밀어내는 식이라, 부드러운 젤이 물체를 파고드는 비현실적인 “관통(clipping)” 아티팩트가 흔합니다. 촉각 센서 시뮬레이션에서 이런 관통은 치명적입니다. 접촉면 이미지 자체가 거짓이 되기 때문입니다. IPC는 접촉 거리가 0에 가까워질수록 발산하는 에너지 장벽(barrier)을 두어, 비관통을 엄밀히 보장하고 복잡한 마찰 상호작용도 안정적으로 다룹니다.
지원 센서(3종):
| 센서 | 유형 | 특징 |
|---|---|---|
| GelSight Mini | 광학 젤 패드 | 가장 널리 쓰이는 표준형 |
| ViTai GF225 | 마커 기반 젤 | 실제 로봇 실험에 사용된 센서 |
| Xense WS | 별도 광학 특성 | 세 번째 이종 설계 |
각 센서는 카메라 내부 파라미터(intrinsics), 젤 패드 메시 형상, 렌더링 방식을 조절 가능한 파라미터로 두어 모델링됩니다. 즉 하나의 프레임워크로 광학·기계적으로 서로 다른 세 센서를 흉내 낼 수 있다는 것이 차별점입니다.
자동 조작 API와 접촉 보호 제어. 여기가 UniVTAC의 영리한 부분입니다. 데이터를 마구잡이로 생성하면 그리퍼가 젤을 으스러뜨리는 “센서 파괴적(sensor-destructive)” 궤적이 섞입니다. 이를 막기 위해 Grasp & Probe, Move & Place, Rotate 같은 원자적 프리미티브(atomic primitive)를 제공하고, 그리퍼 폭을 촉각 반응형 폐루프(closed-loop) 로 제어합니다. 그립을 닫는 속도는 다음과 같은 상태 의존 피드백 법칙을 따릅니다.
\dot{q} = \begin{cases} v_{\text{fast}} & \text{if } d_{\min} = d_{\max} \\[4pt] \min\!\big(|d_{\min} - \delta_{\text{th}}|,\; v_{\text{slow}}\big) & \text{if } d_{\min} < d_{\max} \end{cases}
여기서 d_{\min}은 실시간 최소 접촉 깊이, d_{\max}는 접촉이 없을 때의 깊이, \delta_{\text{th}}는 목표 도달 깊이 임계값입니다. 직관적으로 읽으면, 아직 접촉이 없으면(d_{\min}=d_{\max}) 빠르게 닫고, 접촉이 감지되면 목표 깊이까지 남은 거리에 비례해 천천히 닫는다는 것입니다. 사람이 컵을 잡을 때 손이 닿기 전엔 빨리 다가가다가 닿는 순간 부드럽게 힘 조절을 하는 것과 같습니다. 이 폐루프 덕분에 젤의 변형이 항상 현실적인 범위 안에 머물러, 생성된 촉각 이미지가 신뢰할 만해집니다. 충돌 없는 경로는 cuRobo 모션 플래너로 생성합니다.
생성 데이터 구성. 14종의 기본 형상(구, 원뿔, 별, 십자 등)을 압입자(indenter)로 사용하고, 형상당 약 14,000 프레임, 총 205,826 샘플을 생성합니다. 각 에피소드에서 그리퍼는 물체에 접근해 무작위로 변동된 그립 강도(\delta_{\text{th}})로 잡고, Move/Rotate API로 무작위 회전을 가해 풍부한 전단력과 마커 변위를 만듭니다.
동기화된 정답(ground truth). 시뮬레이터의 진짜 가치는 여기 있습니다. 실제 센서로는 절대 얻을 수 없는 정답을 매 프레임 자동으로 함께 기록합니다.
- 마커가 찍힌 원본 촉각 이미지 I_{\text{marked}} \in \mathbb{R}^{3\times H\times W}
- 마커가 없는 순수 접촉 이미지 I_{\text{pure}} \in \mathbb{R}^{3\times H\times W}
- 깊이 맵 D \in \mathbb{R}^{H\times W}
- 2D 마커 투영 M \in \mathbb{R}^{2\times N}
- 그리퍼 중심 좌표계에서의 물체 자세 p \in \mathbb{R}^{7} (3D 평행이동 + 쿼터니언)
마커가 있는 이미지와 없는 이미지를 동시에 갖는다는 점이 특히 유용합니다. “마커라는 센서 고유 아티팩트”와 “물체 본연의 형상”을 분리해서 학습시킬 수 있기 때문입니다.
UniVTAC 인코더: 세 갈래로 촉각을 이해하기
핵심 학습 산물은 UniVTAC 인코더입니다. 아이디어는 하나의 촉각 이미지를 세 가지 상호 보완적 관점에서 동시에 해석하도록 강제하는 것입니다.
- Shape Perception(형상 인식) — 마커 같은 센서 아티팩트를 걷어내고 물체의 전역적 기하를 포착.
- Contact Perception(접촉 인식) — 깊이와 마커 변위를 통해 국소적인 접촉 동역학을 모델링.
- Pose Perception(자세 인식) — 물체가 센서에 대해 어떤 자세인지 미터 공간(metric space)에서 공간적 기준을 제공.
비유하자면, 같은 손끝 감각을 두고 “이게 무슨 모양이지?(Shape)”, “지금 어디가 얼마나 눌리고 미끄러지나?(Contact)”, “물체가 어느 방향으로 틀어져 있나?(Pose)”라는 세 질문을 동시에 던지고, 그 답을 모두 잘 맞히도록 같은 인코더를 단련시키는 것입니다.
아키텍처. 공유 백본은 ResNet-18 한 개이며, 촉각 관찰을 잠재 벡터(latent vector)로 투영합니다. 그 위에 가벼운 작업별 헤드가 붙습니다.
- Shape 헤드: 전치 합성곱(transposed conv) 디코더로 RGB 재구성(I_{\text{marked}}, I_{\text{pure}})
- Depth 헤드: 단일 채널로 표면 변형(깊이) 재구성
- Marker flow: 경량 MLP로 마커 변위 예측
- Pose 회귀: 작은 MLP로 7차원 자세 벡터 출력
flowchart TD
IMG[Tactile image I_marked] --> ENC[ResNet-18 shared encoder]
ENC --> Z[latent vector z]
Z --> SH[Shape decoder] --> SHL["L_shape: reconstruct I_marked, I_pure"]
Z --> CT[Contact heads] --> CTL["L_contact: depth D + markers M"]
Z --> PS[Pose MLP] --> PSL["L_pose: object pose p in R7"]
SHL --> TOT[L_total weighted sum]
CTL --> TOT
PSL --> TOT
Z -. deployment: keep encoder only .-> DOWN[Downstream policy]
손실 함수. 세 경로 모두 평균제곱오차(MSE)를 기본 기준으로 씁니다(여기서 \hat{\cdot}은 예측값).
\mathcal{L}_{\text{shape}} = \text{MSE}(\hat{I}_{\text{marked}}, I_{\text{marked}}) + \text{MSE}(\hat{I}_{\text{pure}}, I_{\text{pure}})
\mathcal{L}_{\text{contact}} = \text{MSE}(\hat{D}, D) + \text{MSE}(\hat{M}, M)
\mathcal{L}_{\text{pose}} = \text{MSE}(\hat{p}, p)
\mathcal{L}_{\text{total}} = \lambda_s\, \mathcal{L}_{\text{shape}} + \lambda_c\, \mathcal{L}_{\text{contact}} + \lambda_p\, \mathcal{L}_{\text{pose}}
가중치는 \lambda_s = 1.0, \lambda_c = 0.5, \lambda_p = 0.5로, 형상 재구성에 가장 큰 비중을 둡니다.
배포 시점의 핵심 트릭. 학습이 끝나면 작업별 디코더 헤드는 모두 버리고 공유 인코더만 남깁니다. 즉 다운스트림 정책은 추가 추론 비용 없이 “촉각을 잘 이해하도록 사전학습된” 잠재 표현만 받아 씁니다. 헤드들은 학습 중 인코더에게 “좋은 표현이 무엇인지” 가르치는 보조 교사 역할만 하고 무대 뒤로 사라지는 셈입니다.
정책과 벤치마크
다운스트림 정책으로는 ACT(Action Chunking Transformer) 를 사용합니다. 4층 트랜스포머 인코더 + 7층 디코더 구조로, 관찰 한 번당 미래 50 스텝의 행동(action chunk)을 예측하고 시간 평활화(time aggregation)로 부드러운 모터 출력을 냅니다. 시각 특징에는 고정 sin-cos 위치 인코딩을, 촉각 특징에는 학습 가능한 위치 임베딩을 줍니다. 학습은 4,000 스텝, 배치 64, 학습률 1\times10^{-5}, 가중치 감쇠 1\times10^{-4}, 과제당 50개 합성 궤적으로 진행합니다.
8개 벤치마크 과제는 세 범주로 나뉩니다.
| 범주 | 과제 | 설명 |
|---|---|---|
| Pose Reasoning | Lift Bottle | 병을 수직으로 들어 올려 벽 5 cm 이내 유지 |
| Pose Reasoning | Lift Can | 지름 4-6 cm 캔을 미끄러짐 없이 들기 |
| Pose Reasoning | Put Bottle in Shelf | 병을 잡아 선반 공간에 배치 |
| Shape Perception | Grasp Classify | 질감이 다른 두 원통을 구분·분류 |
| Contact-Rich | Insert Hole | 60도/120도 경사 구멍 방향을 더듬어 시험관 삽입 |
| Contact-Rich | Insert HDMI | 회전 불확실성 속에서 HDMI 커넥터 정렬·삽입 |
| Contact-Rich | Insert Tube | 2.0 cm 튜브를 2.05 cm 구멍에(틈 0.05 cm) 삽입 |
| Contact-Rich | Pull Out Key | 슬롯에서 열쇠를 저항이 느껴질 때까지 돌린 뒤 뽑기 |
물리 기반 성공 기준. 단순히 “과제를 끝냈는가”만 보지 않고, 최대 관통 깊이가 안전 임계값을 넘지 않았는지, 젤 패드와 물체 사이에 큰 미끄러짐이 없었는지까지 봅니다. 시뮬레이션 아티팩트를 악용하는 꼼수 해법(degenerate solution)을 걸러내기 위함입니다.
전문가 시연의 의도적 실패. 흥미롭게도 벤치마크 궤적을 항상 최적으로 만들지 않습니다. 실행 중 무작위 실패를 넣고 전문가 컨트롤러가 접촉 피드백을 보며 교정 동작을 하게 합니다. 그 결과 다양한 접촉 패턴이 담긴 궤적이 생겨 촉각 학습에 더 유익해집니다. “완벽한 시범만 보면 실수 복구를 못 배운다”는 모방학습의 고전적 교훈을 데이터 생성 단계에 반영한 것입니다.
실험
메인 결과: 시각만으로는 부족하다
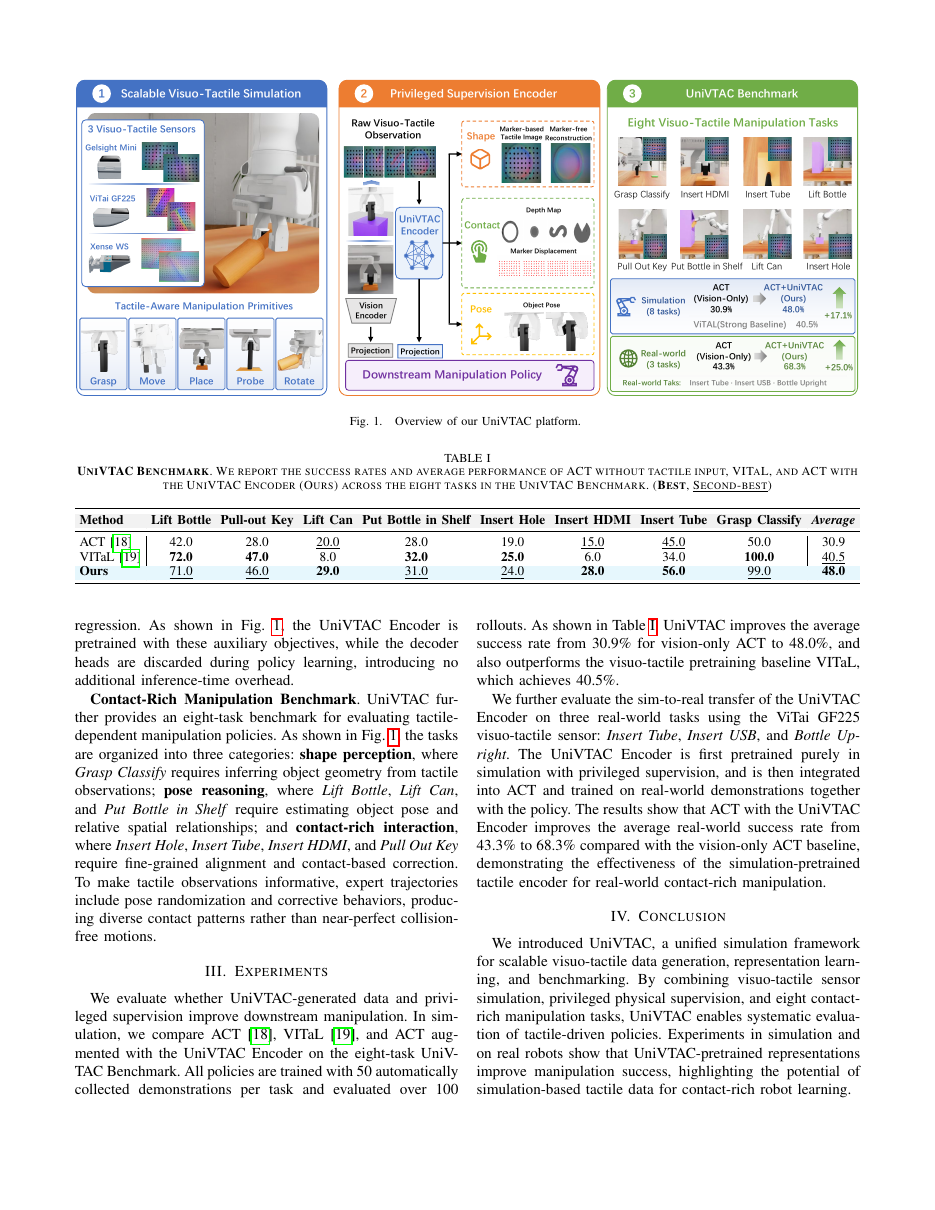
ACT 정책에 (a) 시각만, (b) VITaL(대조학습 기반 베이스라인), (c) ACT + UniVTAC 인코더를 붙여 8개 과제에서 성공률을 비교했습니다.
논문 PDF — p.2
| 과제 | ACT (시각) | VITaL | ACT + UniVTAC |
|---|---|---|---|
| Lift Bottle | 42.0% | 72.0% | 71.0% |
| Pull-out Key | 28.0% | 47.0% | 46.0% |
| Lift Can | 20.0% | 8.0% | 29.0% |
| Put Bottle in Shelf | 28.0% | 32.0% | 31.0% |
| Insert Hole | 19.0% | 25.0% | 24.0% |
| Insert HDMI | 15.0% | 6.0% | 28.0% |
| Insert Tube | 45.0% | 34.0% | 56.0% |
| Grasp Classify | 50.0% | 100.0% | 99.0% |
| 평균 | 30.9% | 40.5% | 48.0% |
해석: UniVTAC 인코더는 시각 전용 대비 평균 +17.1%p, 대조학습 베이스라인 VITaL 대비 +7.5%p 향상됩니다. 특히 정밀 삽입(Insert HDMI, Insert Tube)과 Lift Can처럼 VITaL이 오히려 성능이 낮은(8%, 6%, 34%) 과제에서 UniVTAC가 안정적으로 우위를 보입니다. 이는 VITaL의 대조학습이 일부 접촉 의존 과제에서 표현을 잘 정렬하지 못함을 시사합니다. 반면 Grasp Classify(형상 분류)는 촉각만 넣으면 거의 100%로 풀려, 시각 50%와 극적으로 대비됩니다.
경로 절제(ablation): 세 갈래가 모두 필요한가
세 인지 경로를 하나씩 켜고 끄며 ACT로 평가했습니다(Scratch는 사전학습 없이 처음부터 학습).
| 과제 | Scratch | Contact | Shape | Contact+Shape | Full |
|---|---|---|---|---|---|
| Lift Bottle | 56.0 | 59.0 | 51.0 | 62.0 | 71.0 |
| Pull-out Key | 40.0 | 42.0 | 35.0 | 28.0 | 46.0 |
| Lift Can | 33.0 | 12.0 | 26.0 | 18.0 | 29.0 |
| Put Bottle in Shelf | 34.0 | 24.0 | 25.0 | 39.0 | 31.0 |
| Insert Hole | 3.0 | 32.0 | 20.0 | 21.0 | 24.0 |
| Insert HDMI | 16.0 | 24.0 | 25.0 | 23.0 | 28.0 |
| Insert Tube | 45.0 | 43.0 | 53.0 | 60.0 | 56.0 |
| Grasp Classify | 45.0 | 99.0 | 98.0 | 100.0 | 99.0 |
| 평균 | 34.0 | 41.9 | 41.6 | 43.9 | 48.0 |
해석: 세 경로를 모두 합친 Full 모델이 평균 48.0%로 가장 높습니다. Contact 단독(+7.9%p), Shape 단독(+7.6%p)도 Scratch 대비 분명한 이득을 주며, Pose까지 더한 Full에서 시너지가 정점을 찍습니다. 흥미로운 대비는 Insert Hole입니다. Scratch에서는 3%에 불과하지만 Contact 경로만 넣어도 32%로 급등합니다. “경사 구멍 방향을 더듬어 찾는” 과제가 본질적으로 접촉 동역학에 의존함을 정확히 보여줍니다. 다만 일부 과제(Lift Can, Pull-out Key)에서는 개별 경로가 오히려 손해를 보기도 해, 경로별 기여가 과제 의존적임을 알 수 있습니다.
데이터 스케일링: 많을수록 좋다(대체로)
사전학습 데이터 양을 0부터 20만까지 늘려가며 본 결과입니다(주요 과제 발췌, 단위 %).
| 과제 | 0 | 1K | 5K | 10K | 50K | 100K | 200K |
|---|---|---|---|---|---|---|---|
| Lift Bottle | 56.0 | 45.0 | 44.0 | 51.0 | 58.0 | 59.0 | 71.0 |
| Insert Hole | 3.0 | 4.0 | 6.0 | 19.0 | 32.0 | 26.0 | 24.0 |
| Insert HDMI | 16.0 | 21.0 | 21.0 | 24.0 | 38.0 | 36.0 | 28.0 |
| Grasp Classify | 45.0 | 100.0 | 99.0 | 100.0 | 100.0 | 100.0 | 99.0 |
| 평균 | 34.2 | 38.3 | 38.3 | 44.1 | 45.0 | 44.3 | 48.0 |
해석: 평균 성공률이 데이터 양에 따라 대체로 단조 증가(34.2% → 48.0%)해, “대규모 합성 데이터” 전략의 타당성을 뒷받침합니다. 다만 개별 과제는 50K~100K 부근에서 정점을 찍고 200K에서 살짝 떨어지기도 합니다(Insert Hole, Insert HDMI). 평균은 최댓값에서 오는데, 이는 과제마다 최적 데이터 양이 다르며 무조건 더 많은 데이터가 항상 최선은 아님을 시사합니다(추측: 형상 14종에 국한된 데이터 다양성의 포화 가능성).
실세계 sim-to-real: 미세조정 없이도 통한다
실제 로봇(Tianji Robotics Marvin 7자유도 팔 + 평행 그리퍼 + ViTai GF225 센서)에서 검증했습니다. 과제당 VR 텔레오퍼레이션 시연 150개로 학습하고 20회 롤아웃으로 평가했습니다.
| 과제 | 시각만 | 시각 + UniVTAC |
|---|---|---|
| Insert Tube | 55.0% | 85.0% |
| Insert USB | 15.0% | 25.0% |
| Bottle Upright | 60.0% | 95.0% |
| 평균 | 43.3% | 68.3% |
해석: 평균 +25%p 향상이며, 가장 중요한 점은 이 인코더가 시뮬레이션 합성 데이터만으로 사전학습되었고 실세계 미세조정 없이 그대로 쓰였다는 것입니다. 시뮬레이터에서 배운 촉각 표현이 실제 센서 입력에도 전이된다는 증거로, sim-to-real 갭을 실질적으로 줄였음을 보여줍니다. Bottle Upright(+35%p), Insert Tube(+30%p)처럼 자세/정렬이 핵심인 과제에서 이득이 큽니다.
비판적 고찰
논문 PDF — p.3
강점
- 세 문제를 한 번에 묶었다. 데이터 생성, 표현 학습, 평가를 분리하지 않고 하나의 일관된 플랫폼으로 제공해, 연구자들이 동일 기준에서 비교·재현할 수 있게 한 점이 가장 큰 기여입니다.
- 데이터 생성의 물리적 정직성. IPC 기반 비관통 보장 + 폐루프 그립 제어 + 물리 기반 성공 기준이라는 삼중 장치로, “시뮬레이터를 속이는” 비현실적 데이터와 꼼수 정책을 동시에 차단합니다. 촉각 시뮬레이션에서 흔히 무시되는 부분을 정면으로 다뤘습니다.
- 배포 효율성. 보조 헤드를 버리고 인코더만 남기는 설계로 추론 비용 증가가 없습니다. 실무 적용에 친화적입니다.
- 미세조정 없는 sim-to-real 전이. 합성 데이터만으로 +25%p의 실세계 향상은 설득력 있는 결과입니다.
- 이종 센서 통합. 광학 특성이 다른 3종 센서를 한 프레임워크로 지원해 일반성을 높였습니다.
약점과 한계
- 데이터 다양성의 한계. 압입자가 14종 기본 형상에 국한됩니다. 데이터 스케일링에서 일부 과제가 200K에서 정체·하락한 점은 형상 다양성 포화의 신호일 수 있습니다(추측). 실세계의 복잡한 임의 형상으로의 일반화는 별도 검증이 필요합니다.
- 단일 플랫폼·소규모 평가. 실세계 검증이 단일 로봇(Marvin) + 단일 센서(ViTai GF225) + 3개 과제 + 과제당 20 롤아웃에 그칩니다. 통계적 신뢰구간이 제시되지 않아 ±수 %p 차이의 견고성은 단정하기 어렵습니다.
- 과제 의존적 경로 기여. 절제 실험에서 개별 경로가 일부 과제(Lift Can, Pull-out Key 등)에서 오히려 손해를 봅니다. 세 경로의 결합이 항상 최선은 아니며, 과제별로 표현이 충돌할 가능성을 시사합니다. 가중치 \lambda의 민감도 분석은 제시되지 않았습니다.
- 워크숍 포맷의 정보 제약. 본 논문은 워크숍 발표본으로, 렌더링 파이프라인의 sim-to-real 갭 보정(예: 도메인 랜덤화 세부), 학습 시간·연산 비용, 실패 사례 분석 등은 간략하거나 생략되어 있습니다.
- 시각 베이스라인의 절대 성능이 낮음. Insert HDMI 15%, Insert USB 15% 등 베이스라인 자체가 매우 낮아, 향상폭이 커 보이는 측면도 있습니다. 더 강한 시각 베이스라인 대비 우위는 후속 검증이 필요합니다.
요약 및 결론

논문 포스터
UniVTAC는 시각-촉각 조작 연구의 고질적 병목인 데이터 부족·센서 이질성·평가 표준 부재를 하나의 시뮬레이션 플랫폼으로 통합 해결하려는 시도입니다. 핵심은 세 가지입니다. 첫째, IPC 물리와 폐루프 그립 제어로 물리적으로 정직한 촉각 데이터를 20만 샘플 규모로 자동 생성합니다. 둘째, 형상·접촉·자세 세 경로의 보조 감독으로 촉각 중심 표현을 사전학습하는 UniVTAC 인코더를 만들되, 배포 시엔 인코더만 남겨 추가 비용이 없습니다. 셋째, 물리 기반 성공 기준을 갖춘 8개 표준 벤치마크를 제공합니다.
결과는 명확합니다. 시뮬레이션에서 시각 전용 대비 평균 +17.1%p, 실세계에서 미세조정 없이 +25%p의 성공률 향상을 달성했습니다. 무엇보다 “시뮬레이터에서만 배운 촉각 감각이 실제 로봇에 그대로 전이된다”는 점을 보였다는 데 의미가 있습니다.
로봇공학 실무자 관점에서 이 연구의 매력은 재현성과 즉시 활용 가능성입니다. 직접 비싼 촉각 데이터를 모으지 않고도, 통합 시뮬레이터에서 표현을 사전학습해 자신의 조작 정책에 끼워 넣을 수 있는 길을 제시합니다. 한계(형상 다양성, 단일 플랫폼 검증, 통계적 견고성)는 분명하지만, 더 다양한 센서 모달리티와 동적 상호작용, 개방형 환경으로 확장된다면 시각-촉각 조작의 사실상 표준 플랫폼으로 자리 잡을 잠재력이 있습니다.