flowchart TD
A[Input RGB image of human grasp] --> B[Stage 1: Hand-Object Modelling]
B --> B1[ResNet-18 encoder]
B1 --> B2[Hand branch: MANO params theta_h, beta_h -> hand mesh + joints]
B1 --> B3[Object branch: object center + SDF values -> object mesh]
B2 --> C[Stage 2: Contact Anchor + Force Closure]
B3 --> C
C --> C1[Extract fingertip contacts + normals, filter by SDF and antipodal]
C1 --> C2[HDBSCAN clustering on normals -> force components]
C1 --> C3[HDBSCAN clustering on positions -> contact components]
C2 --> C4[Hierarchical anchor assignment by gripper capacity]
C3 --> C4
C4 --> C5[Differentiable force-closure optimisation -> optimal contacts x*]
C5 --> D[Stage 3: Kinematics Optimisation]
D --> D1[LA-ICP correspondence between robot links and x*]
D1 --> D2[Optimise q, R, T under joint limits and collision]
D2 --> E[Physically plausible robot grasp]
E --> F[PyBullet simulation validation]
📃GenHand
grasp
retargeting
teleop
GenHand: Generalised Human Grasp Kinematic Retargeting
- 🤖 GenHand는 사람 손과 로봇 그리퍼 간의 형태학적 차이로 인해 발생하는 teleoperation 및 imitation learning에서의 kinematic retargeting 문제를 해결하기 위해 제안된 새로운 object-oriented 접근 방식입니다.
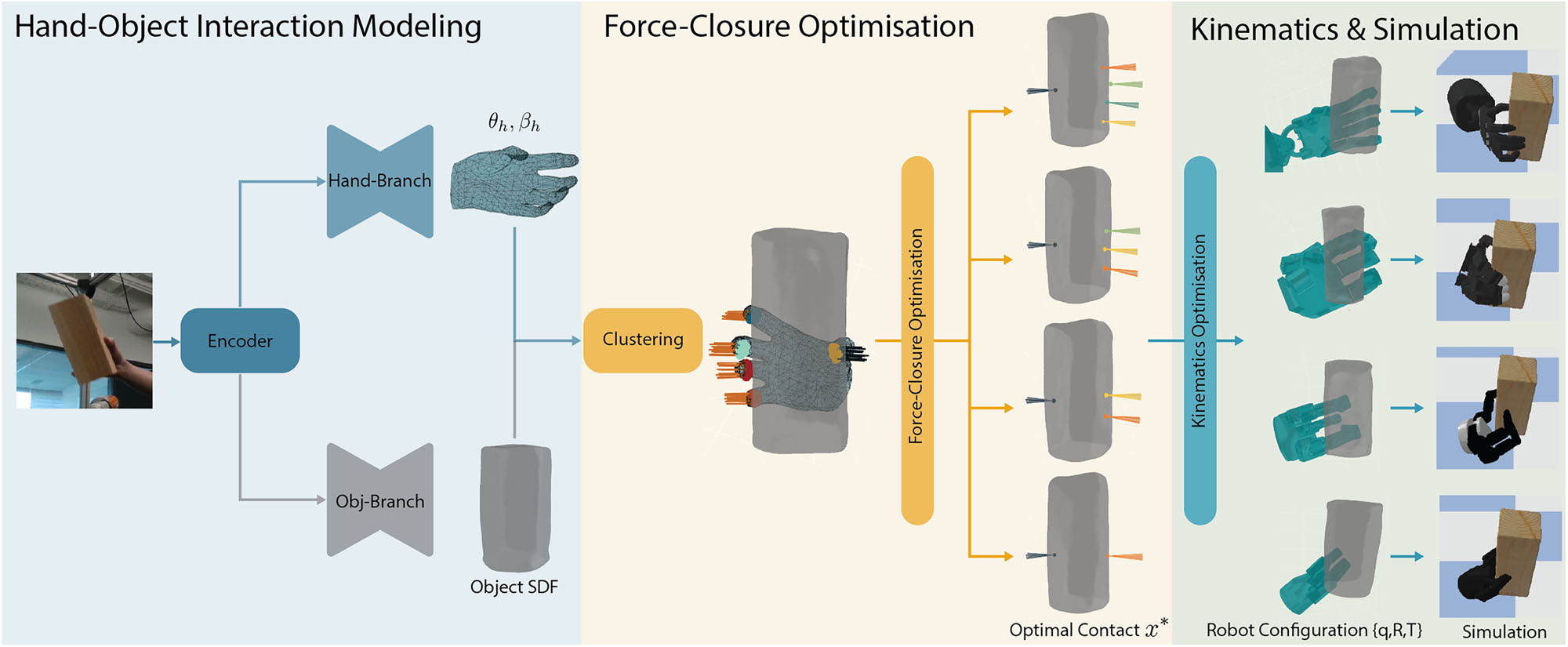
- 🦾 이 프레임워크는 재구성된 hand-object geometry에서 contact region을 추출하고, force closure optimization을 통해 물리적으로 안정적인 contact anchor를 생성하며, kinematics optimization으로 그리퍼 구성을 최적화하여 human-like grasp를 구현합니다.
- 📊 extensive evaluation 결과, GenHand는 다양한 그리퍼와 객체에 대해 기존 baseline 대비 net wrench residual과 surface contact consistency에서 크게 향상된 성능을 보이며, simulation success rate도 39.8% 더 높았습니다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
이 논문은 사람의 제스처를 로봇 매니퓰레이터의 동작으로, 특히 견고하고 인간과 유사한 grasping이 필요한 객체 조작 작업에 효과적으로 변환하는 데 필수적인 kinematic retargeting 문제를 다룹니다. 기존 방법들은 주로 손의 형태, 특히 손가락 끝 위치를 복제하는 데 중점을 두었지만, 다양한 형태의 grippers에 적응할 때 grasp 품질이 저하되는 경우가 많았습니다. 이러한 한계를 극복하기 위해 본 논문은 force closure와 kinematic similarity를 최적화하여 다양한 grippers에 대해 인간과 유사한 grasps를 생성하는 kinematic retargeting 알고리즘인 GenHand를 제안합니다.
기존 방법 및 한계:
Kinematic retargeting 방법은 크게 두 가지로 분류됩니다:
- Hand-oriented (Key-vector based) approaches: 인간의 제스처를 직접 capture하여 로봇에 mapping합니다. 주로 인간과 로봇 손의 손가락 끝 사이의 공간적 거리를 최소화하는 kinematics optimization에 의존합니다. 하지만 이러한 접근 방식은 인간 손과 로봇 gripper 사이의 kinematic similarity에 제약을 받으며, gripper가 충분한 contact region을 제공하지 못할 경우 retargeting의 안정성을 보장하지 못합니다. 또한, 객체 형상을 고려하지 않아 contact consistency나 stability analysis를 보장하지 못합니다.
- Object-oriented approaches: 객체 표면의 contact region을 모델링하고 로봇 gripper가 해당 영역을 덮도록 mapping합니다. 이는 객체 형상에 대한 더 나은 적응성을 제공하지만, 손가락 수가 적거나 dexterous 능력이 제한적인 로봇 gripper에 retargeting할 때 grasp 품질과 안정성을 유지하는 데 어려움을 겪습니다.
GenHand의 핵심 아이디어:
GenHand는 kinematic retargeting과 grasp synthesis를 결합하여 안정성을 명시적으로 확보하는 새로운 object-oriented 접근 방식입니다. 재구성된 hand-object geometry로부터 후보 contact regions를 추출하고, 비지도 학습(unsupervised) 기반의 clustering 분석을 통해 인간의 grasps를 구조화된 sub-representations로 추상화합니다. 이 추상화는 dexterity가 제한된 gripper에 대한 합리적인 적응을 가능하게 합니다. 그 다음, differentiable force-closure optimization을 수행하여 sub-representations를 마찰 제약 하에서 평형 상태(equilibrium-feasible configurations)로 유도합니다. 마지막으로, collision 및 joint-limit 제약 하에서 로봇 링크와 target contact 사이의 거리를 최소화하는 kinematics optimization을 제시합니다. 이 optimization은 in-loop linear-assignment and iterative closest point (LA-ICP) 기반의 단계를 포함하여 로봇과 target contact 간의 correspondence를 동적으로 matching함으로써 합법적이고 실행 가능한 grasp configuration을 구현합니다.
GenHand의 방법론 (기술적 세부 사항):
논문 그림 1
- Hand-Object Contact Modelling:
- 입력 이미지로부터 객체와 인간 손의 상호작용을 재구성합니다.
- DeepSDF를 객체 표현에, MANO를 인간 손 표현에 사용합니다.
AlignSDF의 설계를 따라 두 개의 branch로 구성됩니다:- Hand-branch decoder:
MANOpose parameter \theta_h와 shape parameter \beta_h를 예측하고,MANO layer를 통해 손의 joint 위치와 surface mesh를 생성합니다. - Object-branch decoder: point samples를 입력으로 받아 해당
SDF값을 예측합니다. 또한 객체의 중심(center)도 예측합니다.
- Hand-branch decoder:
- 손과 객체 모델링을 위한 Loss Function은 다음과 같습니다: L_{HO}(\mathbf{p}, \mathbf{g}) = \lambda_{sdf_o} | \Delta sdf_o - sdf_o | + \lambda_t || \Delta t_o - t_o ||^2 + \lambda_j || \Delta j_h - j_h ||^2 + \lambda_h || (\theta_h, \beta_h) ||^2 여기서 \mathbf{p}는 예측값, \mathbf{g}는 ground truth 값입니다.
ResNet-18인코더를 사용하여 multiscale visual features를 추출합니다.
- Contact Anchor Generation:
- 인간의 grasp 패턴을 분석하고 로봇 gripper 구조에 맞는 새로운 grasp structure로 재구성합니다.
- Valid Human Contact Point 추출:
MANO모델로 생성된 인간 손 mesh로부터 손가락 끝(fingertip) contact points와 해당 surface normals를 추출합니다.SDF값을 통해 객체 표면과의 근접도를 확인하고, contact points가 객체 표면의 특정 거리 내에 있고 hand contact normal과 object surface normal이 antipodal 조건을 만족하는 경우 유효한 contact point로 선택합니다. - Contact Information 분석 (HDBSCAN Clustering):
- Contact normals에 대한 clustering: grasp 내의 지배적인 force directions를 식별합니다. centroid는 해당 contact positions을 사용하여 계산됩니다.
- Contact positions에 대한 clustering: 인간 grasp의 구조적 배치와 기하학적 배열을 capture합니다.
- Robot Gripper에 Contact Anchor 할당: gripper의 kinematic configuration을 고려하여 계층적 전략으로 할당합니다.
- 가장 뚜렷한 force components (일반적으로 antipodal grasping points)를 우선적으로 할당합니다.
- Dexterous gripper의 경우, normal-based clustering으로 식별된 모든 primary force components를 다룰 때까지 contact anchors를 계속 할당합니다.
- 추가적인 contact capacity가 있는 경우, position-based clustering의 centroids를 통합하여 grasp를 정교화합니다.
- 이러한 과정은 로봇 gripper의 초반 contact region인 \mathbf{x}_h를 제공하며, 다음 단계의 force-closure optimization을 위한 입력이 됩니다. 인간의 grasping과 유사성을 추구하기 위해 재구성된 인간 contact anchor \mathbf{x}_h 근방에 로봇 grasping position \mathbf{x}가 위치하도록 추가적인 penalty term을 도입합니다: L_d(\mathbf{x}, \mathbf{x}_h) = \text{ReLU}(||\mathbf{x} - \mathbf{x}_h||^2 - \epsilon)
- Differentiable Force Closure Optimization:
- Force closure는 객체에 가해지는 모든 외부 wrenches를 n개의 contact points \mathbf{x}^n \in \mathbb{R}^3가 균형을 맞출 수 있음을 설명합니다.
- 선형화된 마찰 피라미드(linearised frictional pyramid) 제약 조건 하에서 force closure를 다음 최적화 문제로 공식화합니다: \min_{\mathbf{x},\mathbf{w}} L_{fc}(\mathbf{x}, \mathbf{w}, \mathbf{x}_h, O) = L_d(\mathbf{x}, \mathbf{x}_h) + || G \sum_{j=1}^n w_j e_j ||^2 - \text{ReLU}(G G^T - \epsilon I_{6 \times 6}) + \text{ReLU}(-\mathbf{w}) + || \text{SDF}(O, \mathbf{x}) - \epsilon || 여기서:
- G = \begin{bmatrix} I_{3 \times 3} & \cdots & I_{3 \times 3} \\ S(\mathbf{x}_0) & \cdots & S(\mathbf{x}_n) \end{bmatrix} \in \mathbb{R}^{6 \times 3(n+1)}
- S(\mathbf{x}) = \begin{bmatrix} 0 & -x_z & x_y \\ x_z & 0 & -x_x \\ -x_y & x_x & 0 \end{bmatrix} \in \mathbb{R}^{3 \times 3}는 contact forces를 wrenches로 mapping하는 cross product matrix입니다.
- G G^T \succeq \epsilon I_{6 \times 6}는 wrench space가 선형적으로 독립적이며 force closure를 위한 full-rank grasp임을 보장합니다.
- \mathbf{f} = \sum_{j=1}^n w_j e_j (e_j는 정규 n-변 다각형 근사의 edge, \sum w_j = 1, w_j > 0)는 선형화된 Coulomb frictional cone
FC제약입니다. - |\text{SDF}(O, \mathbf{x}_j)| = 0는 contact point가 객체 표면에 위치하도록 강제합니다.
- Kinematics Optimization:
- 로봇 configuration을 joint values \mathbf{q}, global rotations \mathbf{R}, global translation vector \mathbf{T}로 정의합니다.
- 로봇의 contact positions \mathbf{x}_r은 다음과 같이 계산됩니다: \begin{bmatrix} \mathbf{x}_{r1} \\ \vdots \end{bmatrix} = \mathbf{R} \begin{bmatrix} \mathbf{f}_k(\mathbf{q}_1) \\ \vdots \end{bmatrix} + \mathbf{T} 여기서 \mathbf{f}_k(\cdot)는 joint values \mathbf{q}를 local frame의 contact positions으로 mapping하는 forward kinematics입니다.
- 최적의 contact anchor \mathbf{x}^*와 로봇 contact points \mathbf{x}_r 간의 correspondence를 확립하기 위해 각 optimization 단계에서 LA-ICP (Linear Assignment Iterative Closest Point) 기반의 정렬(alignment) 방법을 사용합니다.
- 주어진 목표 contact anchors \mathbf{x}^*에 대해 최적의 로봇 configuration \mathbf{q}, \mathbf{R}, \mathbf{T}를 추정하는 optimization objective는 다음과 같습니다: \min_{\mathbf{q},\mathbf{R},\mathbf{T}} L_k(\mathbf{q}, \mathbf{R}, \mathbf{T}, \mathbf{x}^*) = || \mathbf{x}^* - \mathbf{R} \cdot \mathbf{f}_k(\mathbf{q}) + \mathbf{T} ||^2 + \text{ReLU}(\mathbf{q} - \overline{\mathbf{q}}) + \text{ReLU}(\underline{\mathbf{q}} - \mathbf{q}) 여기서 \overline{\mathbf{q}}와 \underline{\mathbf{q}}는 각각 joint limit의 상한과 하한입니다.
GenDexGrasp에서 도입된 pointwise surface-normal-based penetration detection 전략을 사용하여 로봇 contact surface와 객체 surface 사이의 signed distance를 계산, 물리적으로 현실적인 grasp를 유지하고 interpenetrating configuration에 페널티를 부과합니다.
평가 및 결과:
GenHand는 DexYCB 데이터셋을 사용하여 hand-object reconstruction, kinematic retargeting, physics-based simulation의 세 단계에 걸쳐 평가되었습니다.
- Hand-object reconstruction:
CDh,Errj,FSh1,FSh5,CDo,Errc,FSh5,FSh10지표에서gSDF에 비해 약간 낮은 정확도를 보였지만, 3.5배 적은 파라미터와 1.9배 빠른 속도(17.38M,475.57ms/iter)로 더 나은 성능-효율성 trade-off를 보여주었습니다. - Kinematic retargeting:
- CDc (Chamfer Distance of Contact Regions): GenHand는 baseline과 유사한 (
0.1-0.2mm차이) contact-region similarity를 달성했습니다. - Computational time: GenHand는 추가적인 force-closure optimization 단계로 인해 baseline보다 (
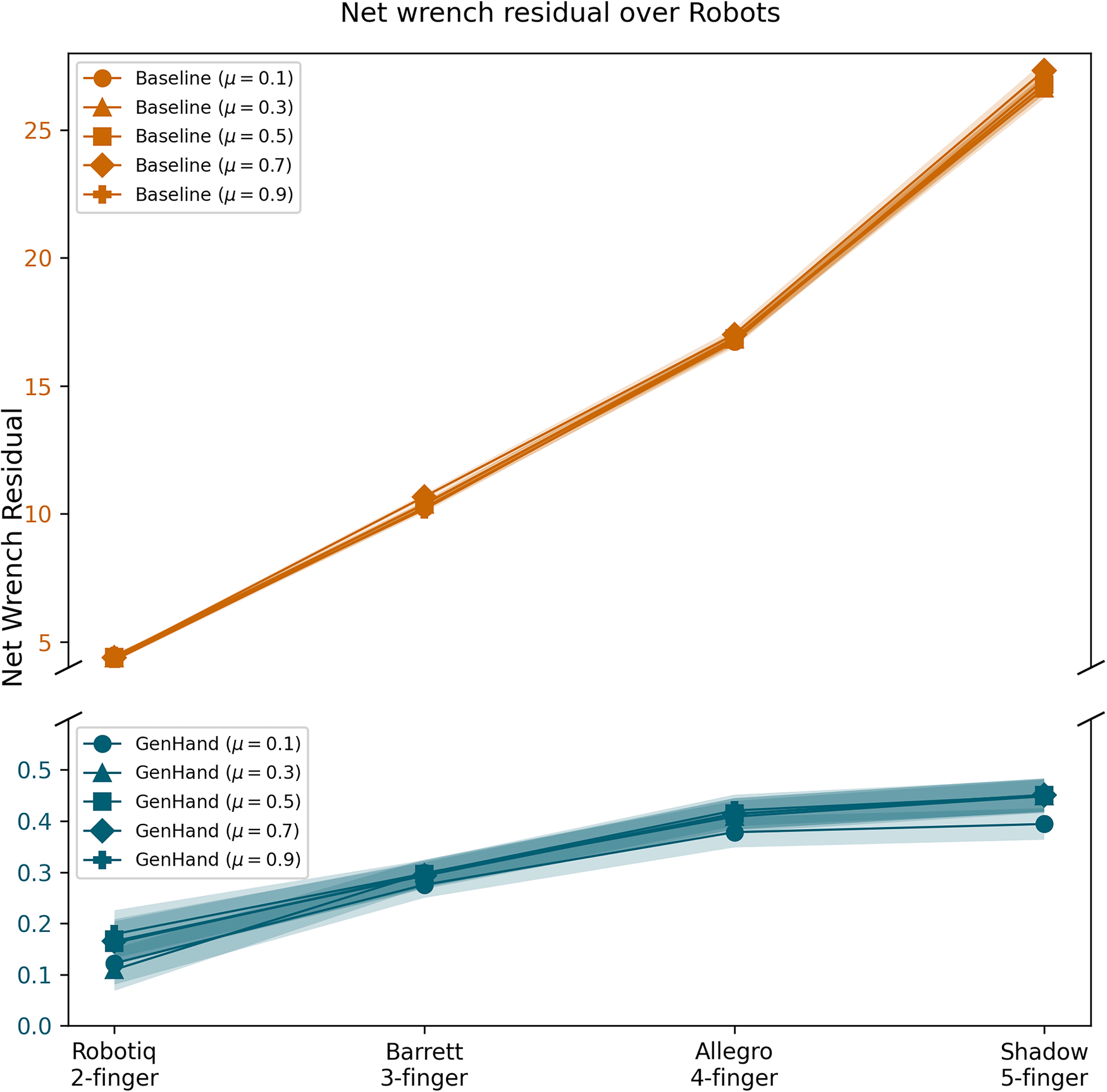
29.31svs24.69sfor Shadow Hand) 약간 더 긴 런타임을 가졌지만, 이는 물리적 타당성 추론을 통합하여 더 높은 grasp 안정성과 성공률에 기여했습니다. - Net wrench residual: GenHand는 모든 gripper 유형과 마찰 수준에서 일관되게 더 낮은 net wrench residuals를 달성하여 더 안정적이고 물리적으로 타당한 grasp configuration을 보여주었습니다. Shadow Hand의 경우
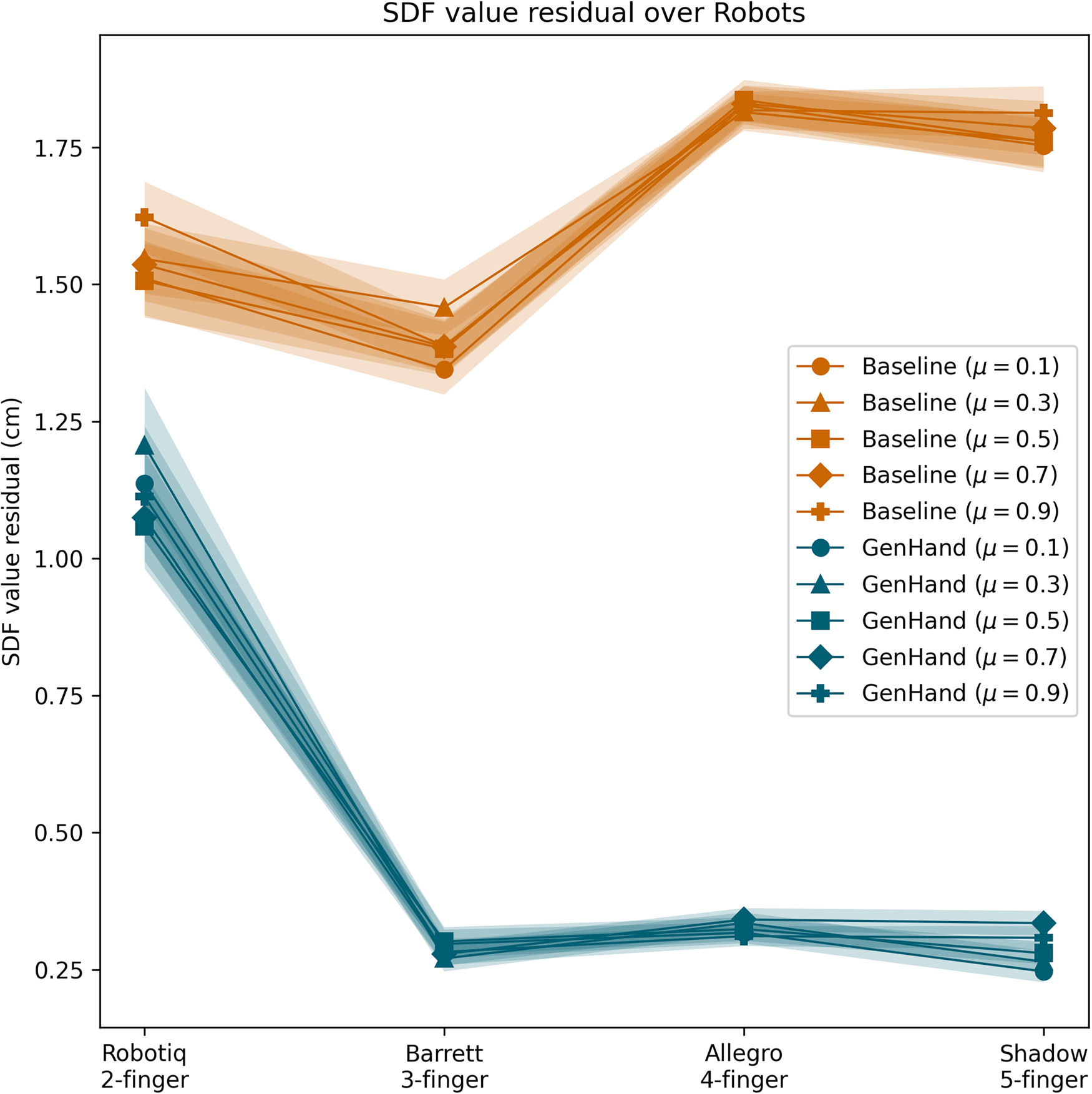
26.77에서0.45로, Robotiq gripper의 경우4.44에서0.12로 감소했습니다. - SDF value residual: GenHand는 모든 gripper 유형과 마찰 계수에서 일관되게 더 낮은 SDF value residuals를 달성하여 더 높은 contact accuracy를 보여주었습니다. Shadow, Allegro, Barrett의 경우
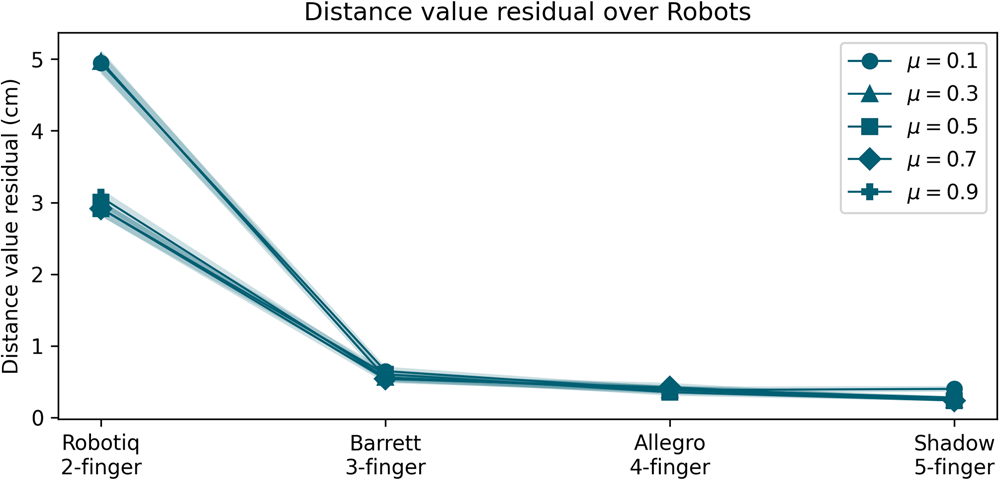
0.35cm미만이었지만, baseline은1.34에서1.82cm였습니다. - Distance residual: 고자유도(high-DOF) gripper일수록 거리 잔차가 낮게 유지되어 kinematic optimization 단계가 의도된 force-stable contact arrangement를 효과적으로 보존함을 나타냈습니다. Shadow Hand는
0.28cm, Allegro는0.39cm, Barrett는0.56cm였습니다.
- CDc (Chamfer Distance of Contact Regions): GenHand는 baseline과 유사한 (
- Simulation:
PyBullet환경에서 grasp success rates를 평가했습니다.- GenHand+HO (전체 시스템)는 baseline (ground-truth 입력 제공 시에도)을 능가했습니다. GenHand+GT (optimization stage만)는 가장 높은 성공률을 보여주었습니다.
- 특히 baseline은
Robotiq gripper에서 현저히 낮은 성능을 보였습니다. - 일반적인 기하학적 형태의 객체(
cylindrical cans,box-like containers)에서는 높은 성공률을 보인 반면, 복잡한 형태(scissors)나 작거나 얇은 객체(bowls,mugs)에서는 낮은 성공률을 보였습니다.
결론:
GenHand는 인간 손 grasping을 다양한 end-effector 유형에 대해 물리적으로 타당하고 인간과 유사한 로봇 grasp로 retargeting하는 새로운 프레임워크입니다. 이 방법은 MANO와 DeepSDF를 사용하여 RGB 이미지로부터 hand-object interaction을 모델링하고, 비지도 clustering 기반의 contact 분석을 통해 인간 grasp 의도를 추상화합니다. 이러한 추상화된 contact anchors는 force-closure optimization을 통해 정교화되고, 최종적으로 kinematic optimization 단계를 통해 로봇의 mechanical constraints를 준수하면서 안정적인 contact anchors를 실현하는 로봇 configuration을 계산합니다. GenHand는 기존 kinematic retargeting baseline을 능가하며, 특히 key-vector 기반 retargeting이 어려운 저자유도(low-DOF) gripper에서 뛰어난 성능을 보였습니다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
서론
사람의 손은 정말 놀라운 도구입니다. 컵을 잡든, 가위를 쥐든, 망치를 휘두르든, 우리는 거의 의식하지 않고도 안정적으로 물체를 다룹니다. 로봇공학에서는 이런 인간의 손동작을 카메라로 관찰해 로봇 손(그리퍼)으로 “옮겨 담는” 작업을 kinematic retargeting(운동학적 리타게팅)이라고 부릅니다. 원격조작(teleoperation)이나 사람 시연으로부터 배우는 모방 학습(imitation learning)의 핵심 전처리 단계죠.
문제는 사람 손과 로봇 손의 형태(morphology)가 너무 다르다는 것입니다. 사람 손은 다섯 손가락에 수십 개의 자유도를 가지지만, 산업용 평행 집게(parallel-jaw gripper)는 손가락이 두 개뿐입니다. 손가락 개수도, 크기도, 관절 구조도 다른 로봇에게 “사람이 했던 그대로” 따라 하라고 강요하면 어떻게 될까요? 손 모양은 비슷해 보일지 몰라도, 정작 물체를 들어 올리려는 순간 미끄러지거나 떨어뜨립니다.
기존 리타게팅 방법은 크게 두 갈래였습니다.
- Hand-oriented(손 중심) / key-vector 방식: 사람의 손가락 끝(fingertip) 위치를 로봇 손가락 끝에 최대한 일치시키도록 최적화합니다. “손 모양을 베끼는” 접근입니다. 직관적이고 빠르지만, 치명적인 약점이 있습니다. 물체의 기하 정보를 전혀 보지 않습니다. 손 모양만 흉내 내다 보니 접촉점이 물체 표면에서 떠 있거나, 손가락 개수가 다른 그리퍼에서는 안정성이 무너집니다.
- Object-oriented(물체 중심) 방식: 물체 표면의 어느 영역에 접촉해야 하는지를 모델링하고, 로봇이 그 영역을 덮도록 합니다. 표면 기하에는 더 잘 적응하지만, 손가락이 적거나 손재주(dexterity)가 떨어지는 그리퍼로 옮길 때는 여전히 접촉 자유도가 부족해 품질이 떨어집니다.
이 논문 GenHand의 핵심 통찰은 다음 한 문장으로 요약됩니다.
“손 모양을 베끼는 것(kinematic similarity)과 물리적으로 안정적인 잡기(force closure)를 하나의 미분 가능한 최적화 파이프라인으로 함께 풀자.”
비유하자면, 기존 key-vector 방식은 “선생님의 손동작을 거울처럼 따라 하는 학생”입니다. 손 모양은 똑같이 만들지만 정작 물체가 떨어지는지는 신경 쓰지 않죠. GenHand는 “선생님이 왜 그렇게 잡았는지(어느 방향으로 힘을 주고, 어디를 눌러야 안 떨어지는지)를 이해한 뒤, 자기 손 구조에 맞게 다시 잡는 학생”입니다.
GenHand의 주요 기여는 세 가지입니다.
- RGB 이미지 한 장에서 물리적으로 타당한 로봇 잡기를 생성하는 전체 파이프라인. 평행 집게부터 고자유도 anthropomorphic hand(인간형 손)까지 다양한 그리퍼에 적용됩니다.
- 비지도(unsupervised) 접촉 분석 알고리즘. 사람 잡기를 “힘 성분(force component)”과 “접촉 성분(contact component)”이라는 구조화된 하위 표현으로 추상화해, 손재주가 부족한 그리퍼에도 적응할 수 있게 합니다.
- LA-ICP 매칭을 루프 안에 넣은 운동학 최적화. 접촉점 배치와 로봇 자세를 동시에 다듬어 안정적인 잡기를 실현합니다.
핵심 성과를 미리 말하면, GenHand는 시뮬레이션에서 4종의 그리퍼와 20개 물체에 걸쳐 key-vector 베이스라인 대비 성공률을 39.8% 향상시켰고, net wrench residual(잔여 합력/토크)과 표면 접촉 일관성에서 모두 우위를 보이면서도 잡기 유사도(grasp similarity)는 비슷한 수준을 유지했습니다.
방법
GenHand는 그림 1에 묘사된 대로 세 단계 파이프라인으로 구성됩니다. 입력은 사람이 물체를 잡고 있는 RGB 이미지 한 장이고, 출력은 로봇 그리퍼의 설정값 \{R, T, q\}입니다. 여기서 q는 관절 값(joint values), R은 전역 회전(global rotation), T는 전역 병진(translation)입니다.
전체 흐름을 다이어그램으로 보면 다음과 같습니다.
1단계: 손-물체 접촉 모델링 (Hand-Object Contact Modelling)
먼저 이미지에서 손과 물체의 3D 기하를 복원해야 합니다. GenHand는 AlignSDF의 설계를 따라 두 갈래(dual-branch) 구조를 씁니다(그림 10).
- 인코더: ResNet-18이 256×256으로 잘린 입력 이미지에서 다중 스케일 특징 벡터를 뽑습니다.
- Hand branch: MLP가 MANO 모델의 포즈 파라미터 \theta_h와 형상 파라미터 \beta_h를 회귀합니다. MANO는 사람 손을 미분 가능한 파라메트릭 모델로 표현해, 이 파라미터로부터 손 메시 정점 v_h와 관절 위치 j_h를 곧바로 계산합니다.
- Object branch: 한쪽은 transposed convolution으로 물체 중심 t_o를 예측하고, 다른 쪽은 선형 레이어 스택이 SDF(signed distance field, 부호 거리 함수) 값을 예측합니다. 입력은 샘플 좌표 + 추정된 물체 중심 + 인코더 특징을 결합한 증강 벡터입니다.
직관적으로, SDF는 “공간의 임의 한 점이 물체 표면에서 얼마나 떨어져 있는가(표면 안쪽은 음수, 바깥쪽은 양수, 표면 위는 0)”를 알려주는 함수입니다. 이게 미분 가능하기 때문에, 나중에 “접촉점을 표면 위(SDF=0)에 올려놓아라”는 제약을 부드러운 최적화 항으로 넣을 수 있습니다.
학습 손실은 다음과 같이 정의됩니다. 예측값 \mathbf{p}=\{\widehat{sdf_o}, \widehat{t_o}, \widehat{j_h}, (\theta_h, \beta_h)\}, 정답 \mathbf{g}=\{sdf_o, t_o, j_h\}에 대해
L_{HO}(\mathbf{p}, \mathbf{g}) = \lambda_{sdf_o}\,|\widehat{sdf_o} - sdf_o| + \lambda_t\,\|\widehat{t_o} - t_o\|_2 + \lambda_j\,\|\widehat{j_h} - j_h\|_2 + \lambda_h\,\|(\theta_h, \beta_h)\|_2 .
마지막 항은 MANO 파라미터에 대한 정규화로, 비현실적인 손 변형을 막습니다. PyTorch + Adam으로 학습률 1\times10^{-4}에서 시작해 500 에폭마다 절반으로 감쇠하며 1600 에폭, RTX 6000 두 장에서 약 60시간 학습합니다.
여기서 주목할 설계 선택: 기존 방법들은 손과 물체를 둘 다 SDF로 복원했지만, GenHand는 물체만 SDF로 복원하고 손은 MANO로 예측합니다. 그 결과 파라미터 수가 3.5배 적고, 반복당 속도가 1.9배 빠릅니다. 실시간 원격조작에 중요한 절충입니다. (gSDF가 일부 복원 정확도 지표에선 약간 더 좋지만, GenHand는 정확도-효율 균형을 택한 것입니다.)
2단계: 접촉 앵커 구성과 미분 가능한 Force Closure
이 단계가 GenHand의 심장입니다. 두 가지 가정을 둡니다. (1) 입력 사람 잡기는 이미 force closure를 만족한다(성공한 시연에서 샘플링했으므로). (2) 접촉은 주로 손가락 끝에서 일어난다.
(a) 유효 접촉점 추출 및 필터링. MANO 손 메시에서 손가락 끝 접촉점과 표면 법선을 뽑고, 각 점에서 물체의 SDF를 질의합니다. 두 조건을 통과한 점만 유효 접촉점으로 남깁니다. - 근접 조건: SDF 값으로 본 물체 표면까지 거리가 임계값 이내. - Antipodal(대향) 조건: 손 접촉 법선과 물체 표면 법선이 정렬되어 있음(서로 맞누르는 형태).
(b) HDBSCAN 이중 클러스터링. 밀도 기반 비지도 클러스터링인 HDBSCAN을 두 번 적용합니다. - 법선에 대한 클러스터링 → 잡기 안의 지배적인 힘 방향(force components)을 찾습니다. 다만 군집 중심은 해당 접촉 위치로 계산해, “어디에 주된 힘이 가해지는지”를 국소화합니다. - 위치에 대한 클러스터링 → 잡기의 공간적 배치(contact components)를 포착합니다.
이 둘은 계층적 관계입니다. 즉 하나의 force component(힘 방향) 아래에 여러 contact component(접촉 위치)가 속합니다. 논문 그림 1의 예시는 2개의 힘 방향과 5개의 접촉 성분으로 분해됩니다.
비유하자면, 사람이 머그컵을 잡을 때 “엄지로 한쪽을 밀고 나머지 손가락으로 반대쪽을 받친다”는 큰 그림이 2개의 힘 방향이고, 그 안에서 검지·중지·약지가 어디를 누르는지가 접촉 성분입니다. 이렇게 추상화하면, 손가락이 2개뿐인 평행 집게에는 “2개의 힘 방향”만 떼어내 할당하고, Shadow 같은 5지 손에는 접촉 성분까지 모두 할당하는 식으로 그리퍼 자유도에 맞춰 유연하게 매핑할 수 있습니다.
(c) 계층적 앵커 할당. 먼저 가장 뚜렷한 한 쌍의 힘 성분(보통 antipodal 잡기점)을 고릅니다. 그리퍼가 더 손재주가 좋으면, 모든 주요 힘 성분을 덮을 때까지 앵커를 추가하고, 그래도 접촉 여유가 있으면 위치 기반 군집 중심까지 채워 넣습니다.
(d) 미분 가능한 Force Closure. 이제 할당된 앵커 근처에서 물리적으로 안정적인 접촉점 x^*를 찾습니다. Force closure란 n개의 접촉점 x_n \in \mathbb{R}^3이 물체에 가해지는 임의의 외력을 상쇄할 수 있다는 조건입니다. 각 접촉의 wrench(힘-토크)는 \lambda = [f_n,\; f_n \times x_n]^T로 표현됩니다. 고전적인 선형화 마찰 피라미드 공식은 다음과 같습니다.
GG^T \succcurlyeq \epsilon I_{6\times 6}, \qquad Gf = 0, f = \sum_{j=1}^{n_e} w_j e_j,\quad \sum_{j=1}^{n_e} w_j = 1,\quad w_j > 0, \qquad |SDF(\mathcal{O}_i, x_j)| = 0,
여기서 grasp matrix G와 cross-product matrix S(\cdot)는
G = \begin{bmatrix} I_{3\times3} & \cdots & I_{3\times3} \\ S(x_0) & \cdots & S(x_n) \end{bmatrix} \in \mathbb{R}^{6\times 6}, \qquad S(x) = \begin{bmatrix} 0 & -x_z & x_y \\ x_z & 0 & -x_x \\ -x_y & x_x & 0 \end{bmatrix}.
직관적으로 풀어보면, - GG^T \succcurlyeq \epsilon I_{6\times6}: wrench 공간이 6차원(3D 힘 + 3D 토크)을 모두 꽉 채워(full-rank) 어떤 방향의 외란도 막을 수 있게 합니다. 한 방향이라도 비면 그쪽으로 물체가 빠져나갑니다. - Gf=0: 접촉력들의 합력과 합토크가 0, 즉 정적 평형. - f = \sum w_j e_j: 접촉력이 정n각형으로 근사한 마찰 콘(Coulomb friction cone) 안에 들어가야 함(미끄러지지 않을 조건). - |SDF(\mathcal{O}, x)|=0: 접촉점이 정확히 물체 표면 위에 있어야 함.
그리고 “사람과 비슷한 잡기”를 유지하기 위해, 로봇 접촉점 x가 복원된 사람 접촉 앵커 x_h 근처(\epsilon 반경 안)에 머물도록 패널티를 둡니다.
L_d(x, x_h) = \mathrm{ReLU}\big(\|x - x_h\|_2 - \epsilon\big).
이 모든 제약을 하나의 미분 가능한 목적함수로 합칩니다.
\min_{x, w} L_{fc}(x, w, x_h, \mathcal{O}) = L_d(x, x_h) + \Big\| G\sum_{j=1}^{n_e} w_j e_j \Big\|_2 - \mathrm{ReLU}(GG^T - \epsilon I_{6\times6}) + \mathrm{ReLU}(-w) + \|SDF(\mathcal{O}, x) - \epsilon\|.
ReLU 항들이 부등식 제약(full-rank, 가중치 양수)을 부드러운 패널티로 바꿔주는 것이 핵심 트릭입니다. 덕분에 경사하강(Adam)으로 전부 풀 수 있습니다.
3단계: 운동학 최적화 (Kinematics Optimisation)
마지막으로 force closure가 찾아낸 목표 접촉점 x^*를 실제 로봇 그리퍼로 실현합니다. 로봇 접촉점의 월드 좌표는 순운동학 f_k(q)와 전역 변환으로 계산됩니다.
\begin{bmatrix} x_r \\ 1 \end{bmatrix} = \begin{bmatrix} R & T \\ 0 & 1 \end{bmatrix} \begin{bmatrix} f_k(q) \\ 1 \end{bmatrix}.
여기서 영리한 부분이 in-loop LA-ICP(Linear Assignment + Iterative Closest Point) 매칭입니다. 문제는 “로봇의 어느 링크(손가락)를 어느 목표 앵커에 대응시킬 것인가”가 자명하지 않다는 것입니다. 매 최적화 스텝마다, 1. 로봇 접촉점 x_r'와 목표 앵커 x^*를 정규화하고 ICP로 두 집합을 같은 좌표계에 정렬합니다(전역 자세 오차 제거). 2. 쌍별 유클리드 거리 행렬을 만들고 linear assignment 문제를 풀어 최적 대응 관계를 동적으로 결정합니다. (로봇 접촉 영역이 앵커보다 많으면 대표 부분집합을 먼저 고릅니다.)
이렇게 대응을 매번 갱신하면서, 다음 목적함수로 q, R, T를 최적화합니다.
\min_{q, R, T} L_k(q, R, T, x^*) = \|x^* - R\cdot f_k(q) + T\|_2 + \mathrm{ReLU}(q - \bar{q}) + \mathrm{ReLU}(\underline{q} - q),
뒤의 두 ReLU 항은 관절 한계 [\underline{q}, \bar{q}]를 넘지 않도록 강제합니다. 추가로 GenDexGrasp의 점별 표면 법선 기반 침투 검출(penetration detection)을 채택해, 손가락이 물체나 자기 자신을 뚫고 들어가는 비현실적 자세를 패널티합니다. 다음은 이 단계의 의사코드입니다.
Input: target anchors x_star, robot model FK f_k, init R,T from MANO, init q
for step in 1..N:
x_r = transform(R, T, f_k(q)) # robot contact points in world
align x_r and x_star via ICP # remove global pose mismatch
D = pairwise_distance(x_star, x_r)
match = linear_assignment(D) # dynamic correspondence
loss = || x_star - (R * f_k(q) + T) ||_2
loss += relu(q - q_upper) + relu(q_lower - q)
loss += penetration_penalty(q, R, T) # GenDexGrasp normal-based
update q, R, T via Adam on loss
return q, R, T실험
평가는 (1) 손-물체 복원, (2) 운동학 리타게팅, (3) 물리 시뮬레이션의 세 축으로 이뤄졌습니다. 데이터셋은 DexYCB(10명 피험자가 20개 물체를 잡는 8천여 RGB 영상, 8개 카메라 시점). 왼손·비접촉 프레임을 제외하고 ref.24의 샘플링 프로토콜로 학습 29,656 / 테스트 5,928 샘플을 추렸습니다(원본 857,000 프레임에서).
손-물체 복원
지표는 Chamfer Distance(CD, cm², 작을수록 좋음), F-score(FS, 1/5/10mm 임계값, 클수록 좋음), 관절 오차 Err_j(mm), 물체 중심 오차 Err_c(mm)입니다(표 1).
핵심 발견: gSDF가 일부 복원 지표에서 근소하게 앞서지만, GenHand는 파라미터 3.5배 적고 1.9배 빠른 균형을 택했습니다(RTX 6000 단일 GPU 기준). 물체만 SDF로 따로 최적화한 결과는 CD_o = 0.42, FS_{h5} = 0.70, FS_{h10} = 0.88로 보고됩니다.
운동학 리타게팅
복잡도가 다른 4종 그리퍼에서 평가했습니다.
| 그리퍼 | 손가락 | 관절 수 | 특징 |
|---|---|---|---|
| Robotiq 2F | 2 | 6 (대칭 결합) | 가장 단순한 평행 집게 |
| Barrett Hand | 3 | 12 (2개 회전, 1개 고정) | 중간 손재주 |
| Allegro Hand | 4 | 16 (독립 구동) | 경량 고자유도 |
| Shadow Hand | 5 | 24 (20 구동 + 4 결합 underactuated) | 가장 손재주 좋은 인간형 손 |
비교 대상은 fingertip-to-palm, fingertip-to-fingertip 형상 차이 + 손끝-물체중심 벡터 정렬 + 손 기저 회전 차이를 최소화하는 전형적인 key-vector hand-oriented 베이스라인입니다.
접촉 영역 Chamfer Distance (CD_c, mm). 베이스라인은 애초에 “손 모양 보존”을 위해 설계됐는데도, GenHand는 모든 그리퍼에서 평균 0.1~0.2mm 차이 이내의 유사도를 달성했습니다(표 2). 즉 유사도를 거의 희생하지 않으면서 안정성을 크게 얻었다는 뜻입니다.
계산 시간(표 3). GenHand가 베이스라인보다 다소 느립니다. force closure 단계가 추가됐고, 재앵커링이 초기 자세에서 벗어나면서 운동학 단계의 충돌 해결·방향 최적화 부담이 커지기 때문입니다. Barrett·Robotiq는 구조가 단순하고 자기 침투 위험이 낮아 침투 검사를 생략해 더 빠릅니다. 저자들은 이 추가 시간이 “중복 계산이 아니라 물리 추론을 더한 대가”라고 강조합니다.
Net wrench residual(그림 2). 접촉력 적용 후 물체에 남는 불균형 wrench의 정규화 크기 합으로, 작을수록 정적 평형에 가깝다(= 더 안정적). 마찰계수 \mu = 0.1 \sim 0.9 전 범위에서 측정했습니다(베이스라인은 단위 마찰 콘 사용). - Shadow hand: 베이스라인 ~26.77 → GenHand 0.45 - Robotiq: ~4.44 → 0.12
전 그리퍼·전 마찰 수준에서 GenHand가 일관되게 낮았습니다. 또한 베이스라인은 마찰계수가 변해도 잔차가 거의 변하지 않는데(접촉 안정성 추론이 없으므로), GenHand는 force-closure 최적화 덕분에 마찰 변화에도 견고했습니다. 흥미롭게도 손가락이 많을수록 잔차가 커지는 경향이 보입니다. 고자유도 손은 관절·접촉 가능성이 많아 해 공간이 커지고 더 어렵다는 의미입니다. 그래도 GenHand는 이 어려운 설정에서도 낮은 잔차를 유지했습니다.
논문 그림 2
SDF value residual(그림 3, 4). 로봇 접촉 영역과 물체 표면 사이의 부호 거리로, 실제로 표면에 잘 붙어 있는지를 봅니다. GenHand는 Shadow·Allegro·Barrett에서 0.35cm 이하를 유지한 반면, 베이스라인은 1.34~1.82cm로 훨씬 떠 있었습니다(손 키포인트만 맞추고 표면 접촉은 신경 안 쓰므로). Robotiq는 길고 평평하며 뻣뻣한 손끝 때문에 GenHand에서도 잔차가 가장 컸습니다.
논문 그림 3
논문 그림 4
Distance residual(그림 5). 최종 로봇 접촉이 force-closure 앵커에 얼마나 가까운지. 고자유도일수록 작았습니다: Shadow <0.28cm, Allegro ~0.39cm, Barrett ~0.56cm. 반면 Robotiq은 저마찰에서 최대 ~5cm, 고마찰에서 ~3cm로 컸습니다. 평행 집게의 제한된 자유도와 최대 파지 폭 때문에 큰 재배향과 접촉점 타협이 불가피했기 때문입니다.
논문 그림 5
시뮬레이션
PyBullet에서 검증했습니다. 영점 net wrench를 강제하므로 중력을 능동 외란으로 취급합니다. 그리퍼가 pre-grasp 자세에서 접근→파지→수직 들어올림을 수행하고, 2초간 안정적으로 들고 있으면 성공으로 봅니다. 세 구성을 비교했습니다(표 4). - GenHand + HO: 전체 파이프라인(이미지에서 손-물체 모델링까지 포함, 시뮬레이션엔 GT 물체 모델 사용). - GenHand + GT: GT 손·물체 메시 사용(최적화 단계만 격리 → 상한 성능). - Baseline + GT: 베이스라인에 GT 메시 제공.
핵심 결과: GenHand+HO가 베이스라인에 GT를 줬을 때보다도 성능이 높았습니다. 즉 파이프라인 자체의 우위가 입력 품질 차이를 압도한 것입니다. GenHand+GT는 대부분의 그리퍼·마찰에서 최고 성공률(상한)을 보였고, 마찰계수가 클수록 성공률이 올랐습니다. 종합적으로 GenHand는 베이스라인 대비 39.8% 향상을 기록했습니다. 베이스라인은 특히 Robotiq에서 크게 부진했는데, 키포인트 기하 의존이 손가락 수·관절이 다른 손으로 잘 일반화되지 않기 때문입니다.
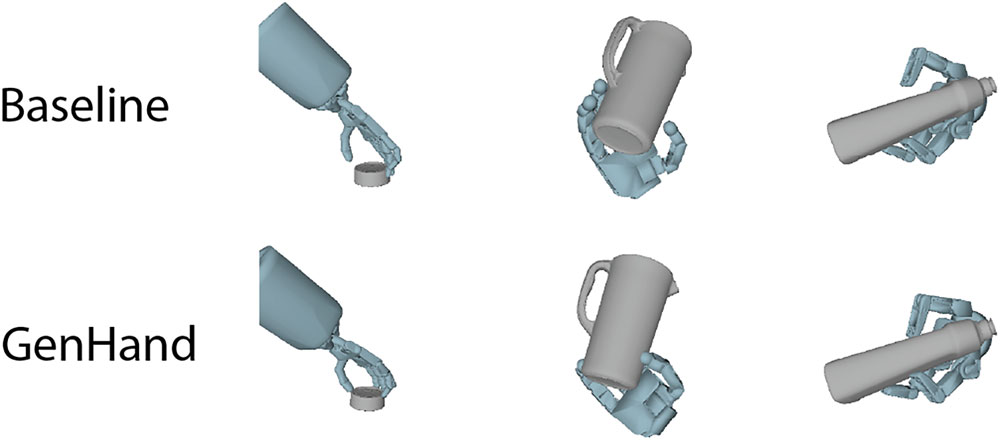
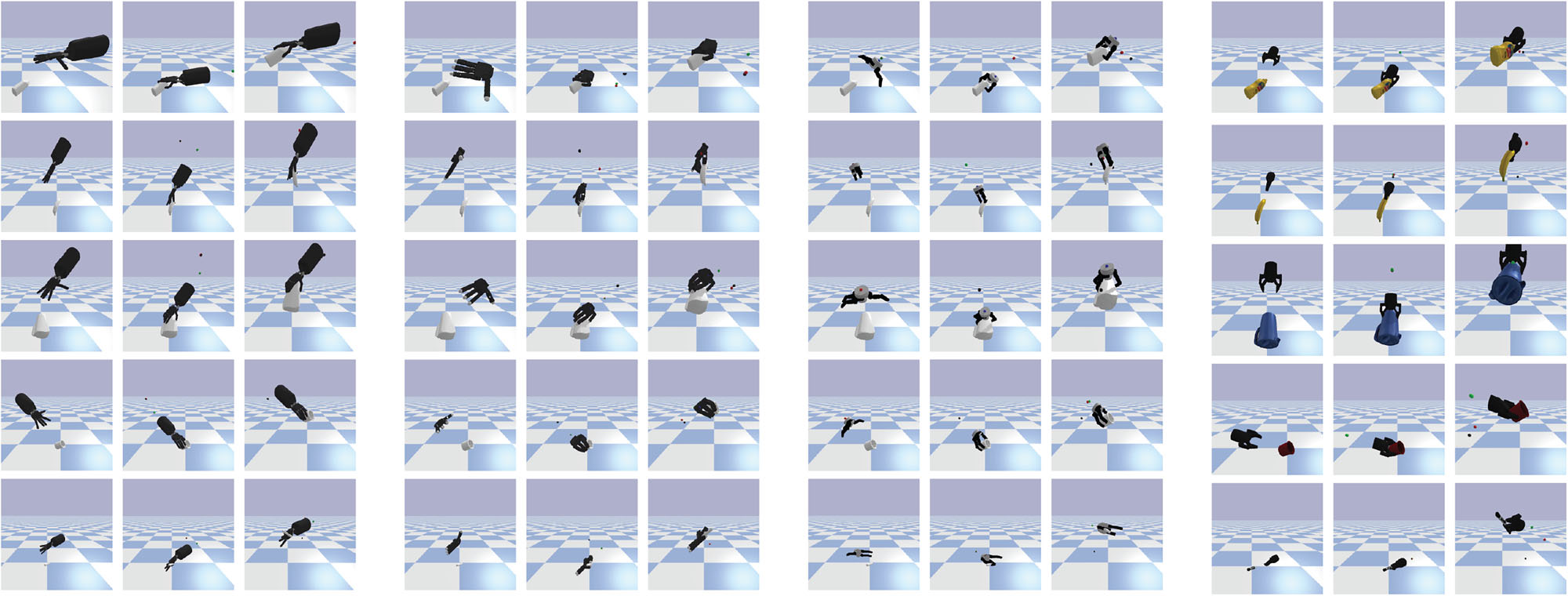
물체별 성공률(그림 8, \mu=0.9). 원통형 캔, 박스형 용기처럼 표면 법선이 잘 분리된 규칙적 기하에서는 성공률이 높았습니다(법선 기반 클러스터링이 잘 작동). 반대로 가위처럼 법선이 무작위로 흩어진 복잡한 물체, 그리고 작거나 껍질 같은(shell-like) 물체는 성공률이 낮았습니다(고해상도 SDF와 정밀 충돌 처리가 필요).
논문 그림 6
비판적 고찰
강점
- 개념적 통합이 깔끔합니다. “손 모양 유사성”과 “물리적 안정성”을 별개로 보던 두 진영을, 미분 가능한 단일 최적화로 묶었습니다. 특히 force closure를
ReLU패널티로 부드럽게 풀어 경사 기반으로 통합한 점이 우아합니다. - 저자유도 그리퍼에서 특히 강력합니다. Robotiq 같은 평행 집게는 기존 key-vector 방식이 가장 약한 지점인데, “힘 방향을 먼저 추상화하고 그 뒤 접촉 성분을 채운다”는 계층적 앵커 할당이 정확히 이 약점을 공략합니다. net wrench residual 26.77→0.45 같은 수치는 인상적입니다.
- 실용적 효율 절충. 손은 MANO, 물체만 SDF로 복원해 파라미터 3.5배·속도 1.9배를 확보한 것은 실시간 원격조작을 염두에 둔 합리적 선택입니다.
- 마찰 견고성. \mu=0.1\sim0.9 전 범위에서 안정적이라는 점은 force-closure 추론이 실제로 작동함을 보여줍니다.
약점과 한계
- 기능적 의도(functional intent)를 보존하지 않습니다. 저자들도 명시했듯, GenHand는 “물리적으로 안 떨어지는 잡기”는 보장하지만 “도구를 쓸 때 손잡이를 정확히 잡는” 같은 기능적 정밀성은 보장하지 않습니다. 망치를 머리 쪽으로 안정적으로 쥐어버리면 mechanically stable이어도 task는 실패입니다. 도구 사용·정밀 조작 응용에서는 치명적일 수 있습니다.
- 지각 단계가 병목입니다. 표 4가 보여주듯 복원 정확도가 곧 잡기 성공률로 직결됩니다. 얇은 껍질 물체의 불완전 복원, 과도하게 매끄러워진 메시(가위 구멍 소실), 잘못된 MANO 포즈 예측이 모두 다운스트림 실패로 이어집니다.
- 최적화 단계의 취약점. (1) 최적 앵커 x^*가 너무 가까이 뭉치면 linear assignment가 모호해져 접촉 오정렬이 생깁니다. (2) 침투 검사 해상도와 효율의 절충 때문에 얇은 물체에서 자기/물체 침투가 발생합니다. (3) 작은 물체는 미세한 위치 변화에도 SDF가 크게 변해, 큰 step size에서 최적화가 안정 해를 지나쳐버립니다(overshoot).
- 시뮬레이션 검증에 그칩니다. 모든 결과가 PyBullet 시뮬레이션 기반이며, 실제 로봇 하드웨어에서의 sim-to-real 검증은 보고되지 않았습니다. 접촉 모델·마찰 추정의 현실 격차가 어떻게 작용할지는 미지수입니다. (추측) sim-to-real 격차가 저자유도 그리퍼에서 특히 클 수 있습니다.
- 속도. force closure 추가로 베이스라인보다 느립니다. “실시간 원격조작”을 표방하지만 정확한 ms 단위 지연이나 실시간 루프 통합 결과는 본문에서 강조되지 않습니다.
관련 연구 비교
- Key-vector hand-oriented 방식(DexPilot 계열, refs.7-13): 손끝 정렬에 집중해 물체 기하를 무시 → GenHand가 정면으로 개선한 베이스라인.
- Object-oriented / contact 기반(Contact2Grasp, ContactOpt 계열, refs.17-20): 접촉 영역 모델링은 하지만 저자유도 그리퍼 적응이 약함. GenHand는 여기에 계층적 추상화 + force closure를 더해 확장.
- 미분 가능 force closure: Liu et al.(ref.32)의 differentiable force closure estimator, Dai et al.(ref.33)의 sequential SDP를 grasp synthesis 토대로 차용.
- Grasp synthesis: DexNet(antipodal 샘플링), GenDexGrasp(ref.35, 침투 검출 전략을 직접 채택)와 같은 일반화 가능 잡기 합성 흐름에 속함. GenHand의 차별점은 “사람 시연 이미지 → 다양한 그리퍼”라는 리타게팅 관점에서 force closure를 통합한 것입니다.
- 복원 백본: DeepSDF, AlignSDF, gSDF, MANO, Obman/AtlasNet 계보를 따릅니다.
요약 및 결론
GenHand는 “사람의 손 모양을 베끼는 것”과 “물리적으로 안정적인 잡기”라는, 그동안 따로 다뤄지던 두 목표를 하나의 미분 가능한 세 단계 파이프라인으로 결합한 운동학 리타게팅 프레임워크입니다.
- MANO + DeepSDF로 RGB 이미지에서 손-물체 기하를 효율적으로 복원하고,
- HDBSCAN 이중 클러스터링으로 사람 잡기를 힘 성분·접촉 성분으로 추상화한 뒤 그리퍼 자유도에 맞춰 계층적으로 앵커를 할당하고, 미분 가능한 force closure로 안정적 접촉점 x^*를 찾고,
- in-loop LA-ICP 운동학 최적화로 관절 한계·충돌을 지키며 로봇 자세 q, R, T를 실현합니다.
핵심 성과는 4종 그리퍼·20개 물체·다양한 마찰에서 key-vector 베이스라인 대비 시뮬레이션 성공률 39.8% 향상, net wrench residual(예: Shadow 26.77→0.45)과 SDF 접촉 잔차의 대폭 감소이며, 그러면서도 접촉 영역 유사도는 0.1~0.2mm 이내로 유지했습니다. 특히 기존 방식이 가장 약했던 저자유도 평행 집게에서 우위가 두드러집니다.
로봇공학 실무자의 관점에서 GenHand가 주는 메시지는 분명합니다. “손동작을 그대로 베끼지 말고, 왜 그렇게 잡았는지(힘의 구조)를 이해한 뒤 내 손에 맞게 다시 잡아라.” 다만 기능적 의도 보존 부재, 지각 단계 병목, 시뮬레이션 한정 검증은 분명한 한계이며, 저자들도 향후 과제로 지각 품질 향상과 task-specific 제약 통합(특히 도구 사용 같은 정밀 잡기)을 제시합니다. 원격조작과 모방 학습의 데이터 전처리 단계에 곧바로 쓸 수 있는, 실용적이면서 이론적으로도 잘 정돈된 기여입니다.