📃StressDream 리뷰
Junwon Seo, Sushant Veer, Ran Tian, Wenhao Ding, Apoorva Sharma, Karen Leung, Edward Schmerling, Marco Pavone, Andrea Bajcsy (CMU IntentLab, NVIDIA Research, University of Washington, Stanford University)
Preprint (arXiv:2606.00267v1), 2026
- 💡 diffusion 기반 video world model이 여러 그럴듯한 미래를 상상할 수 있어도, 표준(nominal) 샘플링은 드물지만 치명적인 고임팩트 결과(충돌·쏟음)를 놓치는 문제를, world model의 초기 noise를 inference-time에 최적화해 상상을 “고임팩트하면서도 여전히 그럴듯한(plausible)” 결과로 조향(steer)해 푼다.
- ⚙️ 최적화 기준을 두 항으로 설계한다 — VLM(Qwen-VL)이 생성된 영상에서 목표 이벤트가 일어났는지 yes/no 로그확률 차이로 채점하는 semantic objective와, 최적화된 noise가 고차원 Gaussian의 typical set을 벗어나 OOD로 표류하지 않게 하는 plausibility objective(norm 집중·등방성·스펙트럼 백색성)를 결합하고, score-distillation으로 denoising 전체를 통한 역전파를 피해 gradient를 근사한다.
- 🎯 동역학을 아는 통제 실험(Naughty Dubins Car)에서 실패가 실제로 가능할 때만 이를 검출하고, 최신 주행 WM(Vista)·조작 WM(Ctrl-World)에서 실패 검출 recall을 54%→94%로 끌어올리며, 이 robust 평가로 VLA 정책(π0.5)을 fine-tune하자 성공률이 39%→71%로 개선된다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
Video world model(WM)은 자율주행·조작에서 “값비싼 실세계 상호작용 없이” 정책을 평가·개선할 수단으로 주목받는다. 핵심은 이들이 diffusion·flow matching 같은 생성 모델이라, ego-action에 조건화된 미래 관측의 분포를 학습한다는 점이다. 문제는 정책 평가·개선이 보통 이 분포에서 뽑은 nominal imagination(전형적인 한두 개 샘플)에 의존한다는 것. 예컨대 매니퓰레이터가 테이블 위 높은 곳에서 열린 봉지를 떨어뜨리면 내용물이 쏟아질 수도 아닐 수도 있는데, nominal 샘플은 “안 쏟아지는” 흔한 결과만 보여주고 드물지만 치명적인 실패를 놓친다. 이걸 잡으려면 엄청난 수의 샘플을 뽑아야 해 비현실적이다. StressDream은 “그러면 그 rare-but-plausible 실패를 직접 겨냥해 상상하게 만들자”는 발상이다.
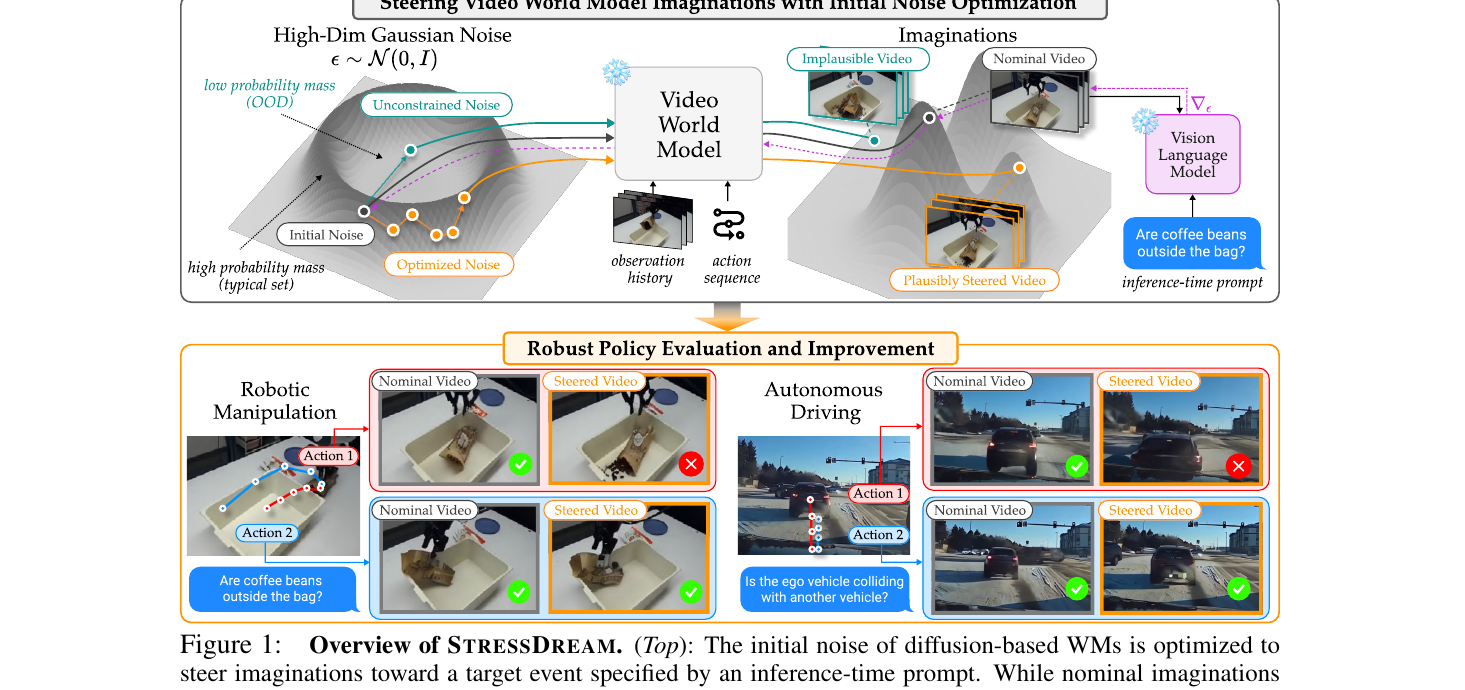
개요(Fig. 1) — (위) diffusion WM의 초기 noise ε를 최적화해 inference-time 프롬프트가 지정한 목표 이벤트로 상상을 조향한다. 무제약 최적화는 typical set을 벗어나 implausible 영상을 낳지만, StressDream은 VLM gradient로 조향하면서 plausibility 항으로 noise를 고확률 영역에 붙들어 둔다. (아래) 그 결과로 같은 action의 “그럴듯한 최악(worst plausible)” 결과를 상상해 robust 정책 평가·개선을 수행한다.
핵심 방법론:
관건은 diffusion WM에서 초기 noise가 곧 제어 변수라는 관찰이다. 조건(관측 이력 \mathbf{o}^{\text{hist}}, action \mathbf{a})이 고정되면 probability-flow ODE를 따르는 생성은 초기 noise \boldsymbol{\epsilon}의 결정론적 함수가 된다: \mathbf{o} = f_\theta(\boldsymbol{\epsilon}, \mathbf{o}^{\text{hist}}, \mathbf{a}). 따라서 어떤 미래가 생성될지는 전적으로 \boldsymbol{\epsilon}가 결정한다. StressDream은 test-time 기준 함수 \mathcal{C}^{\text{test}}를 최대화하도록 이 noise를 gradient ascent로 밀어 올린다:
\boldsymbol{\epsilon}_{i+1} = \boldsymbol{\epsilon}_i + \eta\,\nabla_{\boldsymbol{\epsilon}_i}\!\left[\mathcal{C}^{\text{test}}(\mathbf{o}_i)\right],\qquad \mathbf{o}_i = f_\theta(\boldsymbol{\epsilon}_i, \mathbf{o}^{\text{hist}}, \mathbf{a}).
기준 함수는 두 항의 합 \mathcal{C}^{\text{test}} = \mathcal{C}^{\text{sem}} + \mathcal{C}^{\text{pla}}이다. Semantic 항은 VLM(Qwen-VL)에 “목표 이벤트가 일어났는가?”를 묻고 단일 토큰 yes/no의 로그확률 차이로 미분가능한 점수를 만든다:
\mathcal{C}^{\text{sem}}(\mathbf{o};\,l) = \log p^{\text{VLM}}(\texttt{yes}\mid \mathbf{o}, l) - \log p^{\text{VLM}}(\texttt{no}\mid \mathbf{o}, l).
Plausibility 항 \mathcal{C}^{\text{pla}} = \lambda_1\mathcal{C}^{\text{norm}} + \lambda_2\mathcal{C}^{\text{iso}} + \lambda_3\mathcal{C}^{\text{spec}}은 최적화된 noise가 Gaussian prior의 typical set 안에 머물게 강제한다(노름 집중·블록 등방성·스펙트럼 백색성). 여기에 denoising 전 과정을 통한 역전파 대신 score-distillation 근사 \nabla_{\boldsymbol{\epsilon}}\mathcal{C}^{\text{test}}(\mathbf{o}) \approx \beta\,\nabla_{\mathbf{o}}\mathcal{C}^{\text{test}}(\mathbf{o})를 써서 계산을 감당 가능하게 만든다.
주요 결과:
- 통제 실험(Naughty Dubins Car): 실제 동역학을 아는 세팅에서, StressDream은 실패가 실제로 가능할 때만 그것을 상상해 높은 TPR·TNR을 동시에 달성. plausibility 항을 빼면 TNR이 급락(implausible 실패를 지어냄), classifier guidance는 false positive가 많음(Fig. 2).
- 주행(Vista) / 조작(Ctrl-World): 조작에서 task-failure 검출 recall이 Nominal 54% → Best-of-N 71% → StressDream 94%(Fig. 5). 주행에서도 nominal이 놓치는 안전 위험 이벤트를 target alignment를 높게 유지하며 조향.
- 정책 개선: steered 상상으로 VLA 정책 π0.5를 fine-tune(위험 action 다운웨이트)하자 6개 조작 태스크 평균 성공률 39% → 71%(Fig. 8, 태스크당 20 rollout).
결론:
StressDream은 “많이 샘플링”이 아니라 “noise 공간을 목표를 향해 미분 최적화”로 rare-but-plausible 실패를 효율적으로 발굴한다. VLM이 무엇을 찾을지(semantic)를, typical-set 제약이 현실성 경계(plausibility)를 담당하는 분업이 핵심 설계다. 다만 실패 정의를 텍스트에 의존하고 base WM이 지원하는 결과만 상상할 수 있다는 근본 제약이 있다(WM이 학습분포에서 못 본 실패는 조향해도 안 나옴 — 이것이 “plausibility”의 정확한 의미다).
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
한 줄로 시작하면
“어떤 미래가 생성될지는 diffusion의 초기 noise가 결정한다 — 그러니 무작정 여러 번 뽑지 말고, 그 noise를 ’고임팩트하지만 여전히 그럴듯한 결과’를 향해 직접 최적화하자.” StressDream은 video world model의 초기 Gaussian noise를 inference-time에 gradient 최적화해, 정책 평가·개선에 필요한 worst-plausible 미래를 효율적으로 상상해 내는 방법이다.
배경: 왜 nominal imagination으로는 부족한가
Video WM은 물리 환경의 학습된 시뮬레이터다. Cosmos·Wan 같은 대규모 생성 모델의 흐름 위에서, 로보틱스용 WM은 diffusion·flow matching으로 ego-action에 조건화된 미래 관측의 분포를 학습한다. 분포를 학습한다는 건 물리적 상호작용의 불확실성이나 주변 에이전트 행동의 다양성을 담을 수 있다는 뜻이다.
그런데 실제 정책 평가·개선은 대개 이 분포에서 뽑은 nominal imagination에 의존한다. 이는 WM이 표현하는 다양한 결과를 과소 탐색한다. 정책 평가에서 정작 필요한 것은 action의 plausible하면서도 high-impact인 결과인데(여기서 plausibility란 “학습된 WM 분포가 지지하는” 결과를 뜻한다), naive 샘플링은 엄청난 샘플 예산 없이는 이런 결과를 쉽게 놓친다. 저자들의 예시: 매니퓰레이터가 열린 봉지를 테이블 높은 곳에서 떨어뜨리면 WM 분포에는 쏟아짐/안 쏟아짐이 둘 다 있지만, 봉지를 낮게 놓으면 쏟아짐은 드물거나 아예 없다. 이렇게 “그럴듯한 실패를 상상하는 능력”이 있어야 위험한 action을 걸러내고(평가) 억제할(개선) 수 있다.
핵심 기술적 관찰은 초기 noise가 제어 변수라는 것이다. Diffusion WM은 데이터 분포 \mathbf{o}\sim p^{\text{data}}와 표준 Gaussian \mathbf{x}^T = \boldsymbol{\epsilon}\sim\mathcal{N}(\mathbf{0},\mathbf{I}_D) 사이 변환을 학습하며, 역방향 denoising을 반복해 \mathbf{x}^0 = \mathbf{o}를 얻는다. Probability-flow ODE에 대응하는 결정론적 샘플링에서는 조건이 고정되면 생성이 오직 초기 noise의 함수 \mathbf{o} = f_\theta(\boldsymbol{\epsilon}, \mathbf{o}^{\text{hist}}, \mathbf{a})가 된다. 즉 noise를 고르는 것이 곧 어떤 영상이 나올지를 고르는 것이다.
방법: 목표를 min–max로 정식화하고, noise를 최적화한다
정책 평가·개선의 정식화 (Eq. 4)
action-conditioned WM f_\theta가 주어졌을 때, 후보 action 시퀀스를 그 미래 결과로 평가하고자 한다. 미래 \mathbf{o}는 test-time 기준 \mathcal{C}^{\text{test}}(\mathbf{o})\in\mathbb{R}로 채점된다(실패·충돌 같은 high-impact 사건이 일어났는지). 하나의 action에 여러 plausible 미래가 있을 수 있으므로, 저자들은 robust 정책을 다음의 min–max로 정의한다:
\mathbf{a}^\ast = \arg\min_{\mathbf{a}\in\mathcal{A}}\ \max_{\boldsymbol{\epsilon}\sim\mathcal{N}(\mathbf{0},\mathbf{I}_D)}\ \mathcal{C}^{\text{test}}\!\left(f_\theta(\boldsymbol{\epsilon}, \mathbf{o}^{\text{hist}}, \mathbf{a})\right).
- Inner max(고차원 Gaussian noise 선택): 이 action의 worst plausible 미래를 찾는다 — StressDream이 담당하는 부분.
- Outer min(action 선택): plausible 미래 전반에서, 최악을 포함해도 기준을 낮게 유지하는 robust action을 고른다 — 샘플링 기반 solver나 정책 최적화가 담당.
Inner 문제가 어려운 이유는 noise 공간이 극단적으로 고차원(주행 Vista는 D\approx921{,}600, 조작 Ctrl-World는 D=57{,}600)이고, 각 noise 평가마다 비싼 denoising이 필요해 무작위 반복 샘플링이 rare 사건을 놓치기 때문이다. 그래서 무작위 대신 미분가능한 기준의 gradient로 noise를 직접 상승시킨다(Eq. 5). 문제는 두 가지 — ① 고차원 noise를 naive하게 최적화하면 OOD로 밀려 implausible 영상이 나오고, ② scene마다 달라지는 미묘한 목표 사건을 채점할 미분가능한 기준이 필요하다. StressDream의 두 objective가 각각 이를 푼다.
Semantic objective: VLM으로 목표 사건을 채점 (Eq. 6)
WM은 다양한 scene·task에 걸쳐 작동하므로, 조향할 high-impact 목표 사건은 정책 맥락에 따라 매번 바뀐다. 그래서 “생성 영상에서 scene-의존적 목표 사건이 일어났는가”를 미분가능하게 점수화할 semantic 항이 필요하다. 저자들은 VLM(Qwen-VL)의 일반적 영상 이해 능력을 활용한다. Inference-time 텍스트 프롬프트 l(예: 조작 “the coffee beans spill”, 주행 “a collision occurs”)을 주고, VLM이 yes/no 단일 토큰을 출력하게 한 뒤 로그확률 차이를 점수로 정의한다:
\mathcal{C}^{\text{sem}}(\mathbf{o};\,l) = \log p^{\text{VLM}}(\texttt{yes}\mid \mathbf{o}, l) - \log p^{\text{VLM}}(\texttt{no}\mid \mathbf{o}, l).
단일 토큰 확률을 쓰므로 미분가능하고, 고차원 noise 최적화에 풍부한 gradient 신호를 준다. inference-time에 텍스트만 바꿔 서로 다른 실패 모드를 지정할 수 있다는 게 실용적 강점이다.
Plausibility objective: noise를 typical set 안에 붙든다
Diffusion은 Gaussian prior에서 뽑은 noise로 학습되었으므로, noise가 typical set(대부분의 학습 noise가 놓이는 영역)을 벗어나면 결과 영상이 WM 분포에서 벗어나거나(implausible) 화질이 망가진다. 중요한 미묘함: 고차원에서 typical set은 최고 밀도 영역과 다르다 — 영벡터(zero vector)는 밀도는 높지만 Gaussian에서 샘플될 가능성은 극히 낮다. Gradient 최적화가 noise를 이 typical set 밖으로 밀 수 있으므로, 저자들은 세 통계량으로 이를 규제한다:
\mathcal{C}^{\text{pla}}(\boldsymbol{\epsilon}) = \lambda_1\mathcal{C}^{\text{norm}}(\boldsymbol{\epsilon}) + \lambda_2\mathcal{C}^{\text{iso}}(\boldsymbol{\epsilon}) + \lambda_3\mathcal{C}^{\text{spec}}(\boldsymbol{\epsilon}).
- Norm concentration. Gaussian noise의 제곱 노름은 \lVert\boldsymbol{\epsilon}\rVert_2^2 \sim \chi_D^2로 반경 \sqrt{D} 근처의 얇은 껍질(shell)에 집중한다. 그래서 이 전형적 반경에서의 이탈을 벌한다: \mathcal{C}^{\text{norm}}(\boldsymbol{\epsilon}) = -\big(\lVert\boldsymbol{\epsilon}\rVert_2 - \sqrt{D}\big)^2.
- Isotropy. 전역 노름이 맞아도 국소적으로 i.i.d. Gaussian답지 않은 상관·구조가 남을 수 있다. noise를 무작위로 치환·분할해 부분벡터 \{\boldsymbol{\epsilon}_i\}_{i=1}^m(\boldsymbol{\epsilon}_i\in\mathbb{R}^k, D=mk)로 나누고, 경험적 2차 모멘트 \widehat{\boldsymbol{\Sigma}} = \frac{1}{m}\sum_i \boldsymbol{\epsilon}_i\boldsymbol{\epsilon}_i^\top가 \mathbf{I}_k에서 벗어남을 벌한다: \mathcal{C}^{\text{iso}}(\boldsymbol{\epsilon}) = -\frac{1}{k}\lVert\widehat{\boldsymbol{\Sigma}} - \mathbf{I}_k\rVert_F^2(여러 무작위 치환 평균).
- Spectral whiteness. 좌표 공간에서 전형적이어도 주파수 영역 artifact가 생길 수 있다. Gaussian noise는 평평한 기대 파워 스펙트럼을 가지므로, 2D DFT 파워 \mathbf{P} = \lvert\mathcal{F}(\boldsymbol{\epsilon})\rvert^2를 B개 공간주파수 bin으로 모아 bin별 평균 파워 \{\hat p_b\}의 분산을 최소화한다: \mathcal{C}^{\text{spec}}(\boldsymbol{\epsilon}) = -\frac{1}{B}\sum_b (\hat p_b - \bar p)^2.
Gradient 근사: denoising 전체를 통한 역전파를 피한다 (Eq. 7–8)
Noise gradient \nabla_{\boldsymbol{\epsilon}}\mathcal{C}^{\text{test}}(f_\theta(\cdots))를 정확히 구하려면 반복 denoising(예: 50 스텝) 전체를 역전파해야 하는데, 메모리·gradient vanishing 문제가 크다. 저자들은 score-distillation을 채택해 초기 noise에 대한 gradient를 생성 샘플에서의 gradient로 근사한다:
\nabla_{\boldsymbol{\epsilon}}\mathcal{C}^{\text{test}}(\mathbf{o}) \approx \beta\,\nabla_{\mathbf{o}}\mathcal{C}^{\text{test}}(\mathbf{o}),\qquad \mathbf{o} = f_\theta(\boldsymbol{\epsilon}, \mathbf{o}^{\text{hist}}, \mathbf{a}).
이렇게 하면 미분가능한 기준 함수만 역전파하면 되고 denoising 체인은 건너뛴다. 최종적으로 두 objective의 gradient를 합쳐 noise를 갱신한다:
\nabla_{\boldsymbol{\epsilon}}\mathcal{C}^{\text{test}}(\mathbf{o}) = \beta\,\nabla_{\mathbf{o}}\mathcal{C}^{\text{sem}}(\mathbf{o};\,l) + \nabla_{\boldsymbol{\epsilon}}\mathcal{C}^{\text{pla}}(\boldsymbol{\epsilon}),
계수 \beta, \lambda_1, \lambda_2, \lambda_3는 WM·noise 차원·VLM에 따라 조정한다.
직관: “확률 껍질 위에서, 원하는 방향으로 걷기”
고차원 Gaussian을 하나의 얇은 구면 껍질로 상상하면 좋다. Nominal 샘플은 그 껍질 위 무작위 한 점이고, Best-of-N은 무작위 여러 점 중 점수 최고를 고르는 것 — 하지만 rare 사건은 껍질 위 아주 좁은 영역에 있어 무작위론 잘 안 걸린다. StressDream은 껍질 위에 머물면서(plausibility: norm·isotropy·spectrum이 껍질/백색성 제약) 점수가 오르는 방향으로 걸어가는(semantic: VLM gradient) 방식이다. plausibility 항을 빼면 껍질을 벗어나(zero-vector 쪽이나 구조화된 방향으로) implausible한 “지어낸 실패”로 미끄러진다 — Fig. 2가 이를 정확히 보여준다.
실험: 통제 실험 → 최신 WM → 정책 개선
통제 실험 — Naughty 3D Dubins Car (동역학을 아는 세팅)
실패가 실제로 가능할 때만 조향이 실패를 잡아내는지 검증하기 위해, 동역학을 아는 이미지 기반 3D Dubins car를 만든다. 상태 s = [p_x, p_y, \theta], 연속 각속도 action a_t\in[-1.25, 1.25] rad/s, 고정 속도 v = 1 m/s, \Delta t = 0.05 s. “naughty”는 확률 p = 0.2로 제어 입력의 부호를 뒤집어 불확실성을 준다. 안전 점수는 \mathcal{C}(s) = p_x^2 + p_y^2 - 0.25^2로 원점 중심 반경 0.25 m의 원형 failure set을 정의한다. WM은 무작위 관측-action 궤적 4,000개로 학습한 one-step(H=1) diffusion 모델(noise 차원 1,024)이며, 여기선 VLM 대신 안전 점수를 \mathcal{C}^{\text{sem}}으로 쓴다.
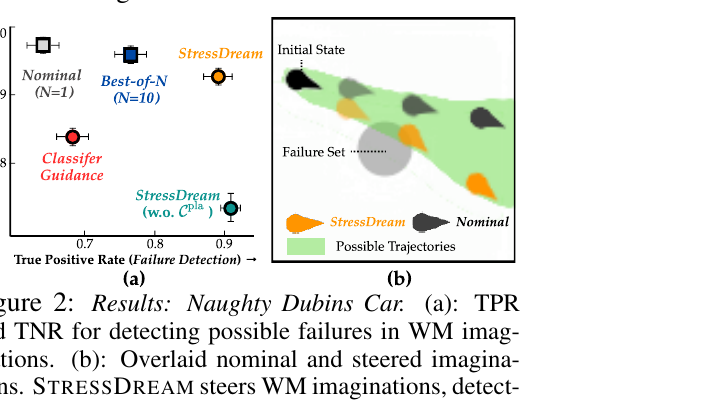
통제 실험(Fig. 2) — (a) 실패 검출의 TPR–TNR. StressDream(주황)은 TPR·TNR을 동시에 높게 유지; plausibility 항을 뺀 변형(청록)은 TNR이 급락(implausible 실패를 지어냄), classifier guidance(빨강)는 TPR·TNR 모두 낮음. (b) nominal(검정) 대비 steered(주황) 상상 궤적 — StressDream은 nominal이 놓치는 plausible 실패(회색 failure set 진입)를 조향해 찾아낸다.
5,000개 초기 상태-action 시퀀스에 대해, 확률적 동역학에서 달성 가능한 ground-truth 최소 안전 점수가 0 미만이면 positive(실패 가능)로 라벨링하고, WM rollout의 예측 최소 안전 점수로 분류한다. 10 스텝 최적화. 비교 대상은 Nominal(N=1), Best-of-N(N=10), classifier guidance(CG, denoising 중 gradient 적용), 그리고 \mathcal{C}^{\text{pla}} 제거 변형. 결과: StressDream은 실패가 plausible할 때만 신뢰성 있게 검출(높은 TPR·TNR). \mathcal{C}^{\text{pla}}가 없으면 TNR이 낮아져(안전한 궤적을 실패로 오분류) implausible 실패를 지어내고, CG도 denoising 궤적을 직접 건드려 false positive가 많다. 무작위 샘플링(Nominal·Best-of-N)은 plausible하긴 하나 rare 실패를 자주 놓친다.
정성 결과 — nominal이 놓치는 실패를, plausible할 때만 조향
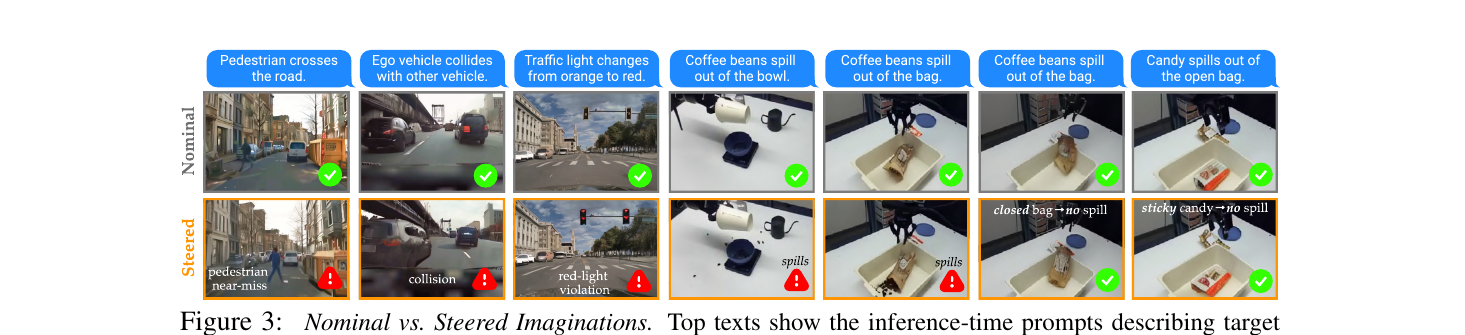
정성 비교(Fig. 3) — 상단 텍스트가 inference-time 목표 프롬프트. StressDream은 nominal이 놓치는 보행자 near-miss·충돌·red-light 위반·쏟음 등 high-impact 결과로 상상을 조향한다. 결정적으로, 목표가 WM 분포에서 지지되지 않으면(맨 오른쪽 두 열: 닫힌 봉지·끈적한 사탕) 억지로 상상하지 않는다(“no spill”).
최신 WM — 주행(Vista)과 조작(Ctrl-World)
- 주행: Vista를 사용(576\times1024 전방 카메라 25 프레임 예측, waypoint를 action으로 조건화, D\approx921{,}600). PhysicalAI-Autonomous-Vehicles(PAI-AV)와 Nexar Collision Prediction 데이터로 fine-tune. 20 스텝 최적화, Wolf·X-CLIP으로 fine-tune된 Qwen2.5-VL-7B-Instruct 사용. 평가는 PAI-AV 8개 안전 위험 카테고리에서 큐레이션한 100개 image–action–text 쌍 + 200개 임박 충돌 예시. 지표는 held-out 평가기 WorldModelBench로 잰 target alignment(영상이 목표 텍스트와 맞는가)와 video quality(plausibility 대리 지표).
- 조작: Ctrl-World를 사용(DROID 세팅, 3개 카메라 뷰 192\times320의 5 프레임 예측, joint-position action, D = 57{,}600). 6개 contact-rich 태스크, 태스크당 약 150개 teleoperation 궤적(성공·실패 포함)으로 fine-tune. 10 스텝 최적화, Qwen3-VL-4B-Instruct 사용.
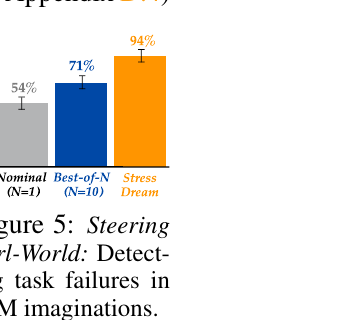
조작 실패 검출 recall(Fig. 5) — Ctrl-World 상상에서 task-failure 검출. Nominal(N=1) 54% → Best-of-N(N=10) 71% → StressDream 94%. 무작위 생성은 과도하게 낙관적이라 plausible 실패를 자주 놓친다.
주행에서는 StressDream이 nominal이 놓치는 안전 위험/실패 이벤트로 상상을 조향하면서(Fig. 4의 target alignment 상승) \mathcal{C}^{\text{pla}} 덕에 video quality를 보존한다 — plausibility 항을 빼면 target alignment·video quality가 둘 다 떨어진다. 또한 조향이 WM 분포에 grounded임을 검증하는 실험(Fig. 6): 충돌로 fine-tune한 Vista에서는 조향이 충돌을 유도하지만, 충돌을 학습하지 않은 base Vista에서는 조향해도 충돌을 상상하지 못한다(target alignment 낮음). 즉 StressDream은 WM 분포가 지지하는 사건만 조향하지, implausible 사건을 합성하지 않는다.
정책 개선 — robust action을 선호하도록 fine-tune
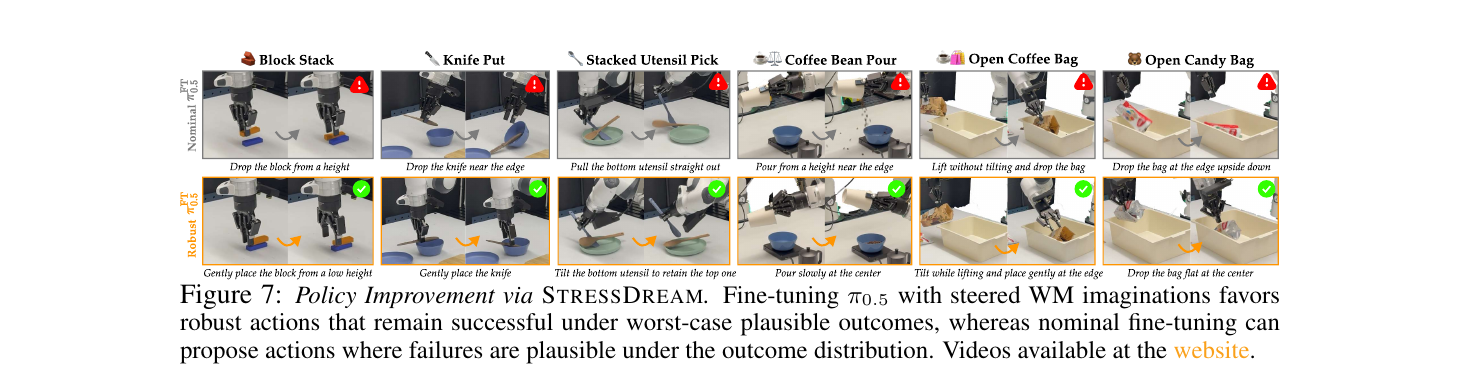
정책 개선(Fig. 7) — steered WM 상상으로 fine-tune한 π0.5는 worst-case plausible 결과에서도 성공하는 robust action(예: 가장자리 대신 중앙에 놓기, 천천히 붓기)을 선호한다. 반면 nominal fine-tuning은 실패가 plausible한 위험 action을 그대로 제안한다.
behavior-cloning 정책 π0.5(VLA)를 개선한다. π0.5-DROID를 태스크당 40개 성공 시연으로 weighted-regression fine-tune하되, 두 세팅을 비교: Nominal \pi^{\text{FT}}(모든 궤적에 균일 가중 1.0) vs Robust \pi^{\text{FT}}(steered 상상에서도 성공한 궤적엔 1.0, steered 상상에서 실패하는 궤적엔 0.1). 즉 그럴듯한 결과 분포에 실패가 없는 robust action을 키우고 위험 action을 억제한다. 결과(Fig. 8, 태스크당 20 rollout 평균): Nominal \pi^{\text{FT}} 39% → Robust \pi^{\text{FT}} 71%. 데이터 수집 당시엔 우연히 성공했더라도 그럴듯한 결과 분포에 실패가 포함되는 위험 action을 걸러낸 덕분이다.
비판적으로 보면
강점
- 문제 재정의가 깔끔하다. “rare 실패를 잡으려면 샘플을 많이”라는 통념을, “생성은 초기 noise의 결정론적 함수이니 noise를 목표로 최적화하자”로 뒤집는다. min–max 정식화(Eq. 4)로 평가(inner)와 개선(outer)을 한 틀에 담은 것도 명료하다.
- plausibility의 조작적 정의가 정직하다. “현실적”을 모호하게 두지 않고 “WM 분포가 지지하는가”로 못 박고, 이를 고차원 Gaussian의 typical set(norm shell·등방성·백색성) 통계로 구체화했다. Fig. 6(충돌 미학습 base Vista에선 충돌을 못 지어냄)이 이 주장을 반증가능한 형태로 검증한 점이 좋다 — 단순 홍보가 아니라 “우리 방법이 못 하는 것”을 명시한다.
- 통제 실험이 있다. ground-truth 동역학을 아는 Dubins car에서 TPR·TNR을 함께 보고하고, \mathcal{C}^{\text{pla}} ablation과 classifier guidance 비교로 각 요소의 역할을 분리했다. VLM 없이 안전 점수를 기준으로 써서 “조향 메커니즘 자체”를 VLM 잡음과 분리해 검증한 설계도 신중하다.
- inference-time 유연성. 텍스트 프롬프트만 바꿔 실패 모드를 지정하고, 별도 재학습 없이 여러 WM(Vista·Ctrl-World)에 붙는다.
약점·한계
- reward hacking에 취약(저자 인정). semantic 항이 VLM 점수에 의존하므로, 생성에 의미 있는 변화 없이 점수만 오르는 reward hacking이 가능하다. 저자도 “일반화되고 robust한 로봇 reward model이 필요하다”고 명시. VLM(Qwen)의 영상 이해 한계·프롬프트 품질이 그대로 병목이 된다.
- “plausibility”는 물리적 현실성이 아니다. 어디까지나 base WM 분포가 지지하는 것에 한정된다. WM이 결함 있는(비현실적) 영상을 내면 그 결함 안에서 조향할 수 있고, WM 학습분포에 없는 실제 위험은 발견하지 못한다. 즉 안전 검증의 완전성은 WM 충실도에 종속되며, “diverse robot data로 물리적으로 일관된 고충실 WM”이라는 미해결 전제 위에 서 있다.
- 평가 지표·규모의 한계. 조작 recall(Fig. 5)·정책 성공률(Fig. 8)이 헤드라인이지만, 태스크당 rollout이 20회로 작아 신뢰구간이 넓을 수 있고, 절대 성공률 71%는 여전히 실사용엔 부족하다. 정책 개선 실험도 실제 로봇이 아니라 WM 상상 내 평가로 라벨링한 weighted regression이라, 실세계 sim-to-real 격차는 별개 문제로 남는다. 또한 gradient 근사(score-distillation)가 도입하는 bias의 영향은 정량적으로 파고들지 않았다.
- 런타임 비용. 현재 WM은 상상 1회에 수 분이 걸리고, 여기에 10–20 스텝의 noise 최적화(각 스텝이 forward+backward)를 얹으므로 실시간 폐루프 평가엔 무겁다. 저자도 효율적 WM(consistency 등)으로의 개선을 향후 과제로 든다.
- outer 최적화는 사실상 미완. 논문의 무게중심은 inner max(조향)이고, robust action을 실제로 뽑는 outer min은 정책 개선 실험의 단순한 가중 재학습으로만 다뤄진다 — 연속 action 공간에서의 본격적 robust 정책 최적화는 열려 있다.
관련 연구와의 자리 매김
- World model 기반 정책 평가·개선. WorldGym·Gemini-in-Veo·World-Gymnast·VLAW 등 “WM을 정책 평가 환경/훈련장으로” 쓰는 흐름 위에 있으나, 이들이 nominal imagination에 의존하는 데 반해 StressDream은 worst-plausible로의 조향을 더한다. 블로그의 SWM(Semantic World Models) 리뷰는 VLM으로 WM 상상을 채점해 정책을 평가한다는 점에서 semantic objective와 문제의식을 공유한다 — StressDream은 여기에 “그 점수를 gradient로 삼아 noise를 최적화”하는 능동적 조향을 얹은 것으로 볼 수 있다.
- Video world model 자체. 기반 WM인 Vista(주행)·Ctrl-World(조작)는 모두 Stable Video Diffusion 계열이며, 이는 로보틱스 WM 계보(NewtWM 리뷰의 연속제어용 다중태스크 WM, VTWM 리뷰의 시각-촉각 WM, RoboVerse 리뷰의 시뮬레이션 플랫폼)와 나란히 놓인다. StressDream은 새 WM을 학습하기보다 기존 WM을 inference-time에 조향한다는 점에서 이들과 상보적이다.
- Diffusion noise 최적화 / inference-time alignment. DNO·RENO·“noise as diffusion guidance” 등 text-to-image에서 초기 noise를 reward로 최적화하던 흐름을, 극단적 고차원 video WM으로 확장하고 typical-set plausibility 제약을 추가한 것이 기여다. classifier guidance(denoising 궤적 직접 수정)와 대비해 “초기 noise만 최적화”가 plausibility에서 유리함을 실험으로 보였다.
- Robust/risk-aware 정책. min–max robust RL·tail-risk 정책과 연결되며, StressDream은 그 “환경 불확실성”을 학습된 WM의 plausible 미래 분포로 구체화한 사례다.
요약
StressDream의 한 문장은 “video world model의 초기 noise를, VLM이 채점하는 목표 사건 방향으로 gradient 최적화하되 고차원 Gaussian의 typical set 안에 붙들어 둠으로써, 많이 샘플링하지 않고도 그럴듯하면서 치명적인 미래를 상상해 낸다”이다. semantic 항(무엇을 찾을지)과 plausibility 항(현실성 경계)의 분업, 그리고 score-distillation gradient 근사가 실용성을 만든다. 통제된 Dubins 실험으로 “실패가 가능할 때만 검출”을 보이고, Vista·Ctrl-World에서 실패 검출 recall 54→94%, VLA 정책 개선 39→71%를 보고했다. 다만 그 힘은 어디까지나 base WM이 지지하는 결과에 한정되고, VLM reward hacking·WM 충실도·런타임이라는 세 가지가 향후 실사용을 가르는 관문으로 남는다. “샘플을 늘리는 대신 latent를 조향한다”는 발상은 world-model 기반 안전 평가에서 계속 확장될 결이다.