📃RoboVerse 리뷰
Haoran Geng, Feishi Wang, Songlin Wei, Yuyang Li, Bangjun Wang 외 다수 (UC Berkeley, PKU, USC, UMich, UIUC, Stanford, CMU, UCLA, BIGAI)
Preprint (arXiv:2504.18904v1), 2025
- 💡 시뮬레이터마다 포맷·API·자산이 제각각이라 합성 데이터·벤치마크가 파편화되는 문제를, 하나의 시뮬레이터-불가지론(simulator-agnostic) 추상화 위에 플랫폼·데이터셋·벤치마크 셋을 통째로 올려 푼다.
- ⚙️ 핵심 인프라 MetaSim이 3계층(범용 config
MetaConfig→ 정렬된 백엔드Handler→ Gym 래퍼)으로 6개 시뮬레이터(Isaac Sim·Isaac Gym·MuJoCo·Genesis·SAPIEN·PyBullet)를 동일 인터페이스로 묶어, cross-simulator 통합·hybrid simulation·cross-embodiment retargeting을 가능케 하고, 그 위에서 14개 벤치마크를 마이그레이션해 276 task category·510.5k trajectory·5.5k asset·50M+ transition의 데이터셋과 IL/RL 통합 벤치마크를 만든다. - 🎯 IL 벤치마크에서 Diffusion Policy 평균 48.6%·ACT 평균 50.0%로 데이터 신뢰성을 검증하고, 4단계 일반화 프로토콜(task→env→camera→lighting)에서 점진적 성능 저하를 측정하며, RoboVerse 데이터로 미세조정한 OpenVLA가 추가 학습 없이 실세계 grasping 50–80%(직접 sim-to-real)를 달성한다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
NLP·CV는 “대규모 데이터 + 표준 벤치마크”로 폭발적으로 성장했지만, 로봇은 두 축 모두에서 막힌다. 실세계 데이터 수집은 비싸고 하드웨어 종속적이며, 실세계 벤치마크는 조명·배치·배경이 매번 달라 재현 가능한 공정 비교가 거의 불가능하다. 시뮬레이션이 대안이지만 — 여기서 RoboVerse의 문제의식이 시작된다 — 시뮬레이터마다 내부 구조·외부 인터페이스·자산 포맷이 너무 달라서, 한 시뮬레이터에서 만든 데이터·태스크·모델을 다른 시뮬레이터로 옮기는 일이 노동집약적이고, 결과적으로 합성 데이터 생태계가 파편화된다. RoboVerse는 이 파편화를 정면으로 겨냥해, 흩어진 시뮬레이터들을 하나의 표준 포맷과 단일 인프라 아래로 통합하는 플랫폼(MetaSim) + 그 위에서 만든 대규모 합성 데이터셋 + 통합 벤치마크의 3요소 패키지를 제안한다.
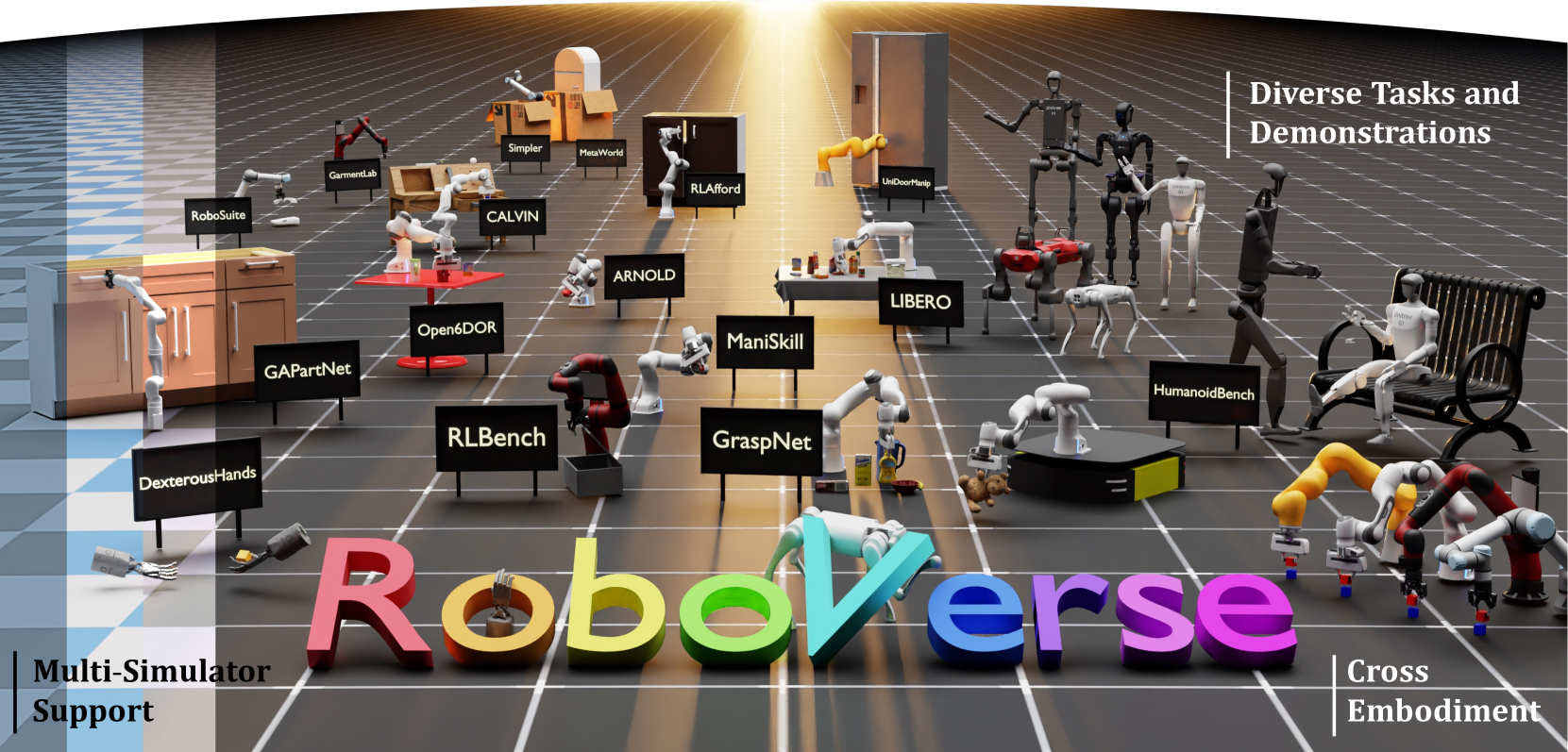
개요(Fig. 1) — RoboVerse는 확장 가능한 시뮬레이션 플랫폼, 대규모 합성 데이터셋, 통합 벤치마크로 구성된다. 통일된 프로토콜로 새 태스크·시연을 매끄럽게 통합하며, 공개 데이터셋 마이그레이션으로 구축된다.
핵심 방법론:
RoboVerse는 알고리즘 논문이라기보다 시스템·데이터셋 논문이다. 핵심은 단일 수식이 아니라 추상화의 설계에 있다. 임의의 시뮬레이션 시나리오를 agents·objects·tasks·sensors·physics 다섯 요소로 분해하고, 이를 시뮬레이터에 무관한 nested dataclass MetaConfig로 표현한다. 한 시나리오 config c가 주어지면, 각 시뮬레이터 백엔드의 Handler가 이를 자신의 명령으로 번역한다:
\text{Sim}_b = \mathcal{H}_b(c),\qquad b \in \{\text{IsaacSim},\text{IsaacGym},\text{MuJoCo},\text{Genesis},\text{SAPIEN},\text{PyBullet}\}.
Handler는 시뮬레이션 수명주기 전체를 공통 메서드(launch(), get_states(), set_states(), …)로 정렬하고, 그 위의 Gym 래퍼가 step()/reset()/render()/close()를 제공한다. 이 정렬 덕에 세 능력이 생긴다 — ① cross-simulator integration(한 시뮬레이터의 태스크·궤적을 다른 시뮬레이터에서 사용, sim-to-sim), ② hybrid simulation(한 시뮬레이터의 물리 엔진 + 다른 시뮬레이터의 렌더러를 결합), ③ cross-embodiment transfer(엔드이펙터 자세 retargeting으로 평행 그리퍼 로봇 간 궤적 재사용). IL 벤치마크 기준선인 Diffusion Policy는 표준 조건부 denoising으로 노이즈를 예측한다: \widehat{\epsilon^{k}}=\epsilon_{\theta}(a^{k},s,k).
주요 결과: (원문 확인 수치만)
- 데이터셋 규모: manipulation 14개 소스 벤치마크 마이그레이션 → 276 task category, 510.5k trajectory, 5.5k asset, 정책 학습용 50M+ state transition(Tab. I).
- IL 벤치마크(Tab. II): 6개 대표 태스크 평균 성공률 — Diffusion Policy 48.6%(78M), ACT 50.0%(84M). 태스크별 편차 큼(예: 접촉 풍부한 robosuite NutAssembly에서 DP 7.1%, ACT 0.0%).
- 4단계 일반화(Tab. III): PickCube에서 Diffusion Policy가 Level 0 52.7% → Level 1 11.1% → Level 2·3 0.0%로 급락 — 카메라·조명 변동에 현 정책이 매우 취약함을 정량화.
- 직접 sim-to-real(Tab. V/VIII): RoboVerse 데이터로 미세조정한 OpenVLA가 추가 학습 없이 미지 물체 grasping에서 7/10·8/10·5/10(50–80%), Octo는 5/10·3/10·6/10(30–60%).
- 궤적 증강(Fig. 10): 50개 source 시연 → 200/1000/3000개 생성 시연으로 늘릴수록 Diffusion Policy 성공률 일관 상승.
결론: RoboVerse는 “어떻게 더 좋은 정책을 학습하는가”가 아니라 “어떻게 시뮬레이션 자산을 통합·확장·표준화하는가”에 답한다. MetaSim의 시뮬레이터-불가지론 추상화 하나로 흩어진 벤치마크를 동일 포맷으로 모으고, 그 위에서 대규모 데이터·통합 벤치마크·sim-to-real 파이프라인을 일관되게 굴릴 수 있음을 광범위한 실험으로 실증한다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
한 줄로 시작하면
로봇 학습이 NLP·CV처럼 스케일하지 못하는 진짜 병목은 모델이 아니라 인프라의 파편화다 — 시뮬레이터마다 포맷이 달라 데이터·태스크가 재사용되지 않는다. RoboVerse는 이 파편화를 시뮬레이터-불가지론 추상화(MetaSim)로 봉합하고, 그 위에 통합 데이터셋과 벤치마크를 쌓아 “시뮬레이션 보조 로봇 학습”의 공용 기반을 제안한다.
왜 어려운가 — 데이터와 벤치마크, 양쪽의 병목
저자들의 출발점은 단순하다. 대규모 데이터와 표준 벤치마크가 NLP·CV를 끌어올렸는데 로봇만 안 된다. 두 가지 길이 다 막혀서다.
실세계 길의 한계. 실로봇 시연 수집은 시간·자원 집약적이고, 모은 데이터는 하드웨어·모달리티 종속적이라 새 시나리오로 잘 옮겨가지 않는다. 더 근본적으로 실세계 벤치마크는 재현이 불가능하다 — 물체 배치가 롤아웃마다 변하고, 자연광이 흔들리며, 배경이 바뀐다. 그래서 공정 비교가 어렵고 개발 반복이 비싸다.
시뮬레이션 길의 한계. 시뮬레이터는 효율적 계산·합성 자산·재현 가능 설정을 주는 매력적 대안이지만, 두 장벽이 있다. (1) 시뮬레이터 설계가 복잡하고 많은 플랫폼이 미성숙해 데이터 구축에 전문성이 든다. (2) 시뮬레이터마다 내부 아키텍처·외부 인터페이스가 천차만별이라 데이터·모델·워크플로를 한 시뮬레이터에서 다른 시뮬레이터로 옮기기가 노동집약적이다. 결과는 파편화된 생태계 — 기존 합성 데이터셋·벤치마크의 재사용이 어렵고, 대규모 데이터 활용이 가로막힌다.
RoboVerse의 명제는 “이 파편화 자체가 해결해야 할 1차 문제”라는 것이다. 더 나은 정책 이전에, 흩어진 시뮬레이터를 하나의 표준 포맷과 단일 인프라로 묶는 일이 먼저다.
방법 상세 — 3요소 프레임워크
RoboVerse는 (1) 시뮬레이션 플랫폼, (2) 대규모 고품질 데이터셋, (3) 통합 벤치마크의 세 부분으로 이뤄지고, 그 심장에 인프라 MetaSim이 있다.
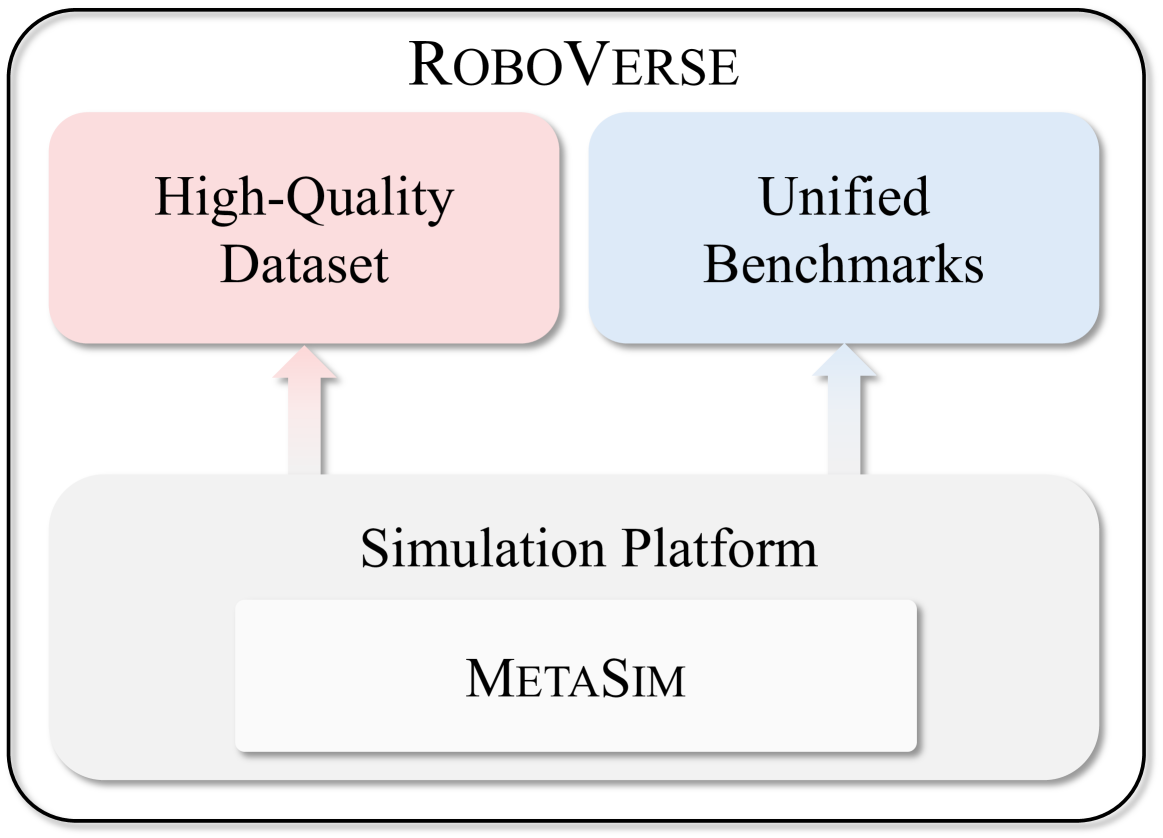
전체 구성(Fig. 2) — 시뮬레이션 플랫폼·대규모 데이터셋·통합 벤치마크. 플랫폼의 핵심은 MetaSim이며, 이를 통해 데이터셋 생성과 벤치마크 구축이 이뤄진다.
MetaSim의 3계층 아키텍처
MetaSim은 특정 시뮬레이션 구현 위에 놓이는 고수준 인터페이스다. 세 계층으로 동작한다.
(1) 범용 설정 시스템 — MetaConfig. 전형적 시뮬레이션 환경은 agents(누가 행동하나), objects(환경은 어떻게 생겼나), tasks(무엇을 하나 — instruction·success metric·reward), sensors(어떻게 인지·측정하나), physics(지배 물리 법칙)의 다섯 요소로 구성된다. 이상적으로 이들은 시뮬레이터-불가지론이어야 한다. RoboVerse는 이를 nested dataclass MetaConfig로 추상화한다. 서로 다른 백엔드가 이 config를 해석해 대응 시뮬레이션을 만들고, 동시에 시뮬레이터 고유 하이퍼파라미터(solver type 등)도 선택적으로 받아 각 시뮬레이터의 고유 기능을 살린다.
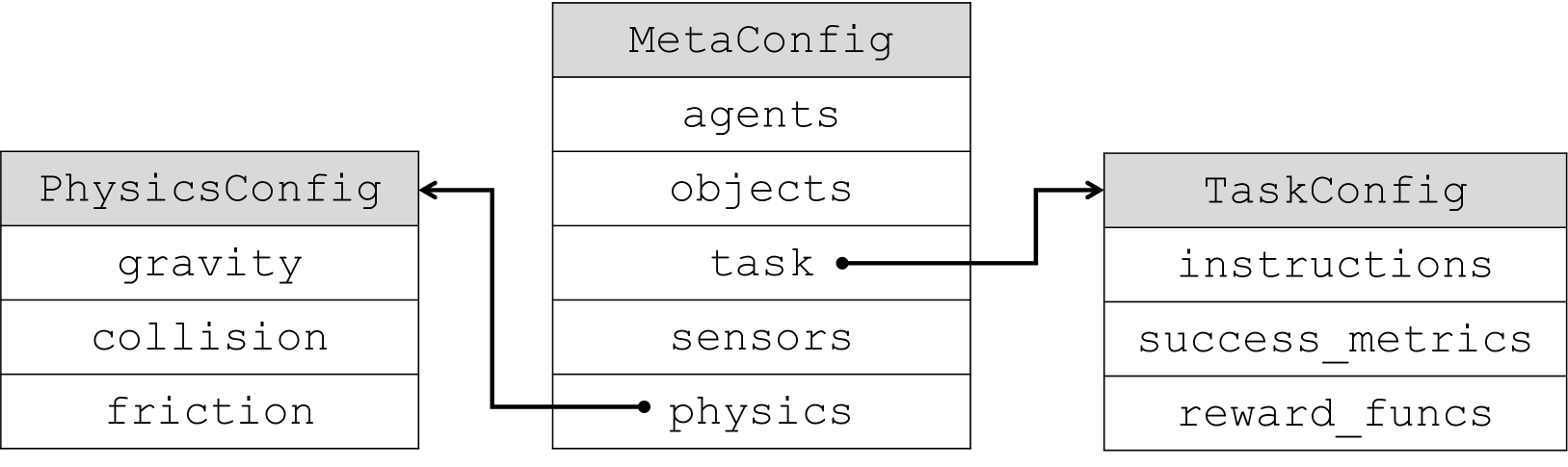
MetaConfig(Fig. 4) — 임의 시뮬레이션 환경의 핵심 요소(agents·objects·task·sensors·physics)를 시뮬레이터-불가지론적으로 추상화한 nested dataclass. task는 TaskConfig(instructions·success_metrics·reward_funcs)로, physics는 PhysicsConfig(gravity·collision·friction)로 펼쳐진다.
(2) 정렬된 시뮬레이터 백엔드 — Handler. 시뮬레이터마다 구현은 다르지만 일상 연산(씬 초기화·객체 로딩·물리 스텝·관측 획득·시간 관리·성공 판정)은 비슷한 패턴을 따른다. MetaSim은 이를 Handler 클래스의 공통 인터페이스로 정렬한다. 각 시뮬레이터는 자기 Handler 인스턴스를 갖고 launch(), get_states(), set_states() 등 수명주기 전체의 공통 메서드를 구현한다.
(3) Gym 환경 래퍼. Handler를 감싸 표준 학습 환경(Gym)으로 만든다. step()/reset()/render()/close()가 내부적으로 Handler 메서드를 호출해 구현된다 — RL·로봇 학습에서 가장 널리 쓰이는 패러다임에 곧장 붙는다.
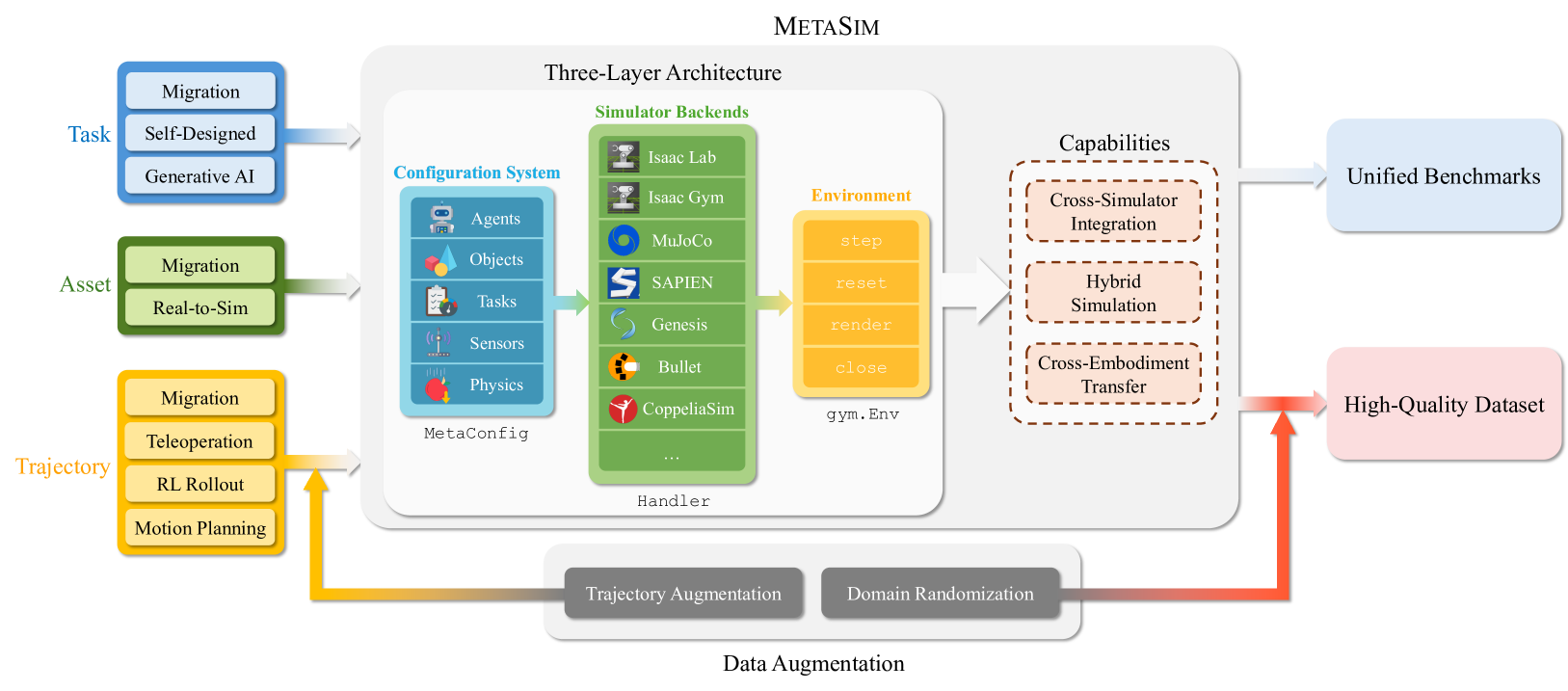
MetaSim 3계층(Fig. 3) — 범용 설정 시스템 + 정렬된 백엔드(Isaac Lab·Isaac Gym·MuJoCo·SAPIEN·Genesis·Bullet·CoppeliaSim) + Gym 래퍼. 이 추상화가 cross-simulator 통합·hybrid simulation·cross-embodiment transfer 세 능력을 가능케 하고, 그 위에서 통합 벤치마크와 고품질 데이터셋이 만들어진다.
세 가지 핵심 능력
이 정렬에서 세 능력이 자연히 나온다. ① Cross-Simulator Integration — 한 시뮬레이터의 태스크·궤적을 다른 시뮬레이터에서 그대로 사용. 예컨대 Meta-World 태스크를 Isaac Gym에서 빠른 병렬 학습에 쓰고, 생성된 궤적을 Isaac Sim에서 렌더링한다(sim-to-sim). ② Hybrid Simulation — 한 시뮬레이터의 강력한 렌더러(예: Isaac Sim)와 다른 시뮬레이터의 정확한 물리 엔진(예: MuJoCo)을 단일 명령으로 결합해 고품질 데이터를 생성. ③ Cross-Embodiment Transfer — 엔드이펙터 자세를 retarget해 서로 다른 평행 그리퍼 로봇 형태 간 궤적을 재사용, 이종 로봇 데이터를 단일 포맷으로 통합.
데이터셋 — 마이그레이션이 주력, 그 위에 생성·증강
데이터 구축의 주된 원천은 기존 시뮬레이션 환경으로부터의 마이그레이션이다. 직접 마이그레이션이 어려운 경우 motion planning·RL rollout으로 완전한 궤적을 만들고, success checker를 맞춰 엄격히 필터링한다. 현재 manipulation 쪽으로 ManiSkill·RLBench·CALVIN·Meta-World·robosuite·MimicGen·GAPartNet·Open6DOR·ARNOLD·LIBERO·SIMPLER·GraspNet·GarmentLab·UniDoorManip 등 14개를 통합했다. Navigation은 VLN-CE의 R2R(10k episode)·RxR(20k episode)을 MatterPort3D(90 scene)와 결합했고, locomotion·whole-body는 HumanoidBench·Humanoid-X·SkillBlender를 가져왔다.
마이그레이션을 넘어 세 갈래로 데이터를 더 모은다 — (a) teleoperation(키보드·조이스틱·스마트폰 앱·모션캡처·VR로 arm·dexterous hand·bimanual 제어), (b) AI-assisted task generation(대규모 생성모델이 공간·의미 제약을 학습해 물리적으로 타당한 씬을 배치, format validation + feasibility check의 2단계 필터링), (c) real-to-sim(모바일 다시점 촬영 → COLMAP·Gaussian Splatting → VLM으로 물리 속성 추론 → TSDF 메시 → URDF 구성). 최종적으로 궤적 증강(MimicGen 프레임워크 기반 object-centric subtask 분해)과 domain randomization으로 다양성·규모를 키운다. Domain randomization은 Isaac Sim handler에서 네 종류로 — 테이블/바닥/벽 재질(테이블 300종, 벽·바닥 각 ~150종), 조명(distant + cylinder light array), 카메라 자세(59개 후보), 반사 속성(roughness·specular·metallic).
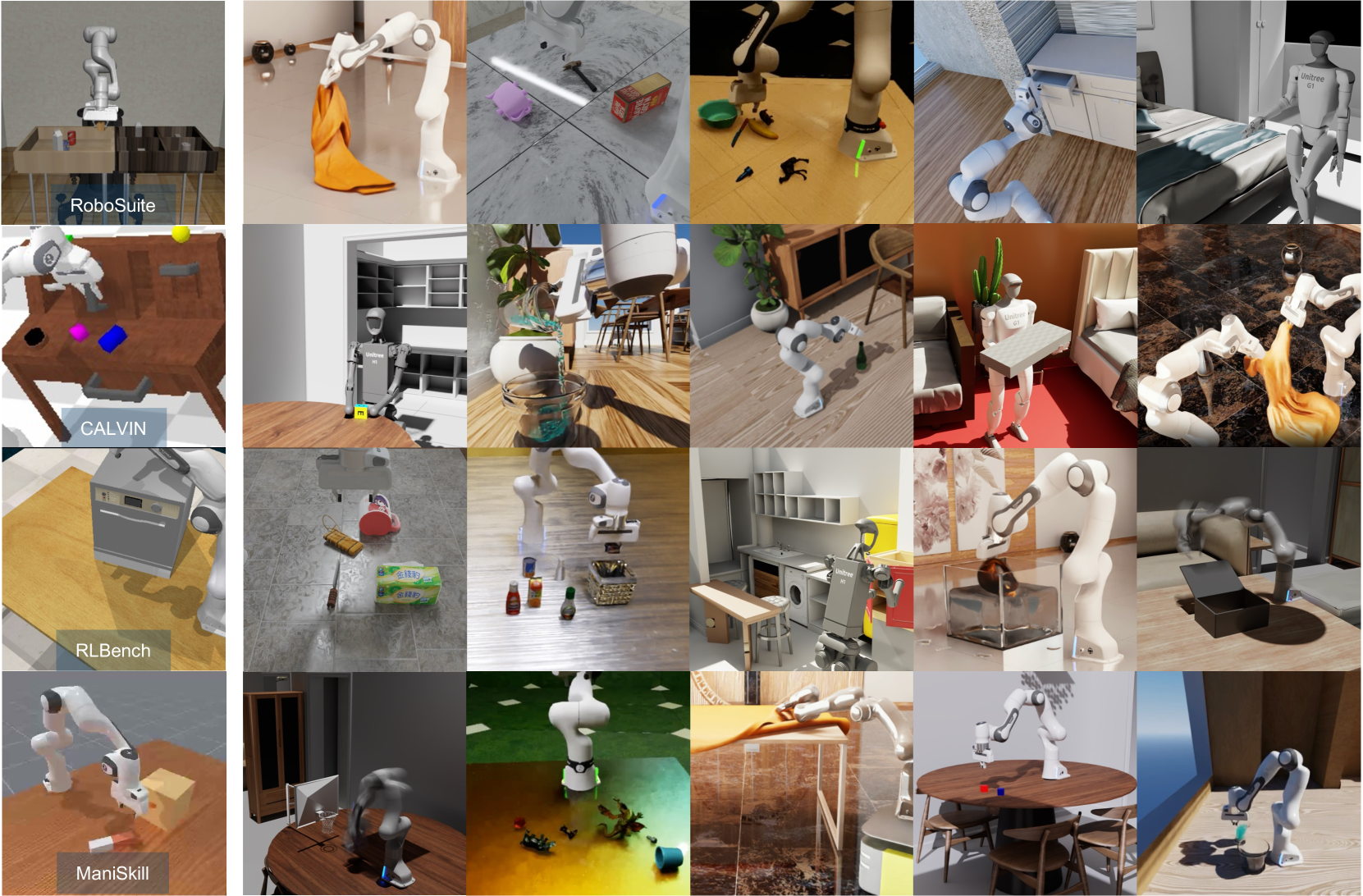
데이터셋 비교·갤러리(Fig. 8) — 좌: 대표적 합성 로봇 데이터셋, 우: RoboVerse 데이터셋. 풍부한 domain randomization을 적용한 대표 태스크들.
벤치마크 — 4단계 일반화 프로토콜과 IL/RL
IL 벤치마크는 고정된 시연 집합과 통제된 평가 환경을 쓴다. 핵심 설계는 4단계 일반화 프로토콜로, 데이터의 90%를 학습, 10%를 일반화 평가에 할당한다 — Level 0: task space 일반화(카메라·재질·조명 고정, 물체 초기화·instruction만 90/10 분할), Level 1: environment randomization(씬·테이블·바닥 변경), Level 2: camera randomization(시점 높이·각도), Level 3: lighting·reflection randomization. RL 벤치마크는 Stable-Baselines3·rsl_rl의 PPO와 원 벤치마크의 TD-MPC2를 MetaSim 인터페이스에 통합해 HumanoidBench를 MuJoCo↔︎Isaac Sim 양쪽에서 학습할 수 있게 했다.
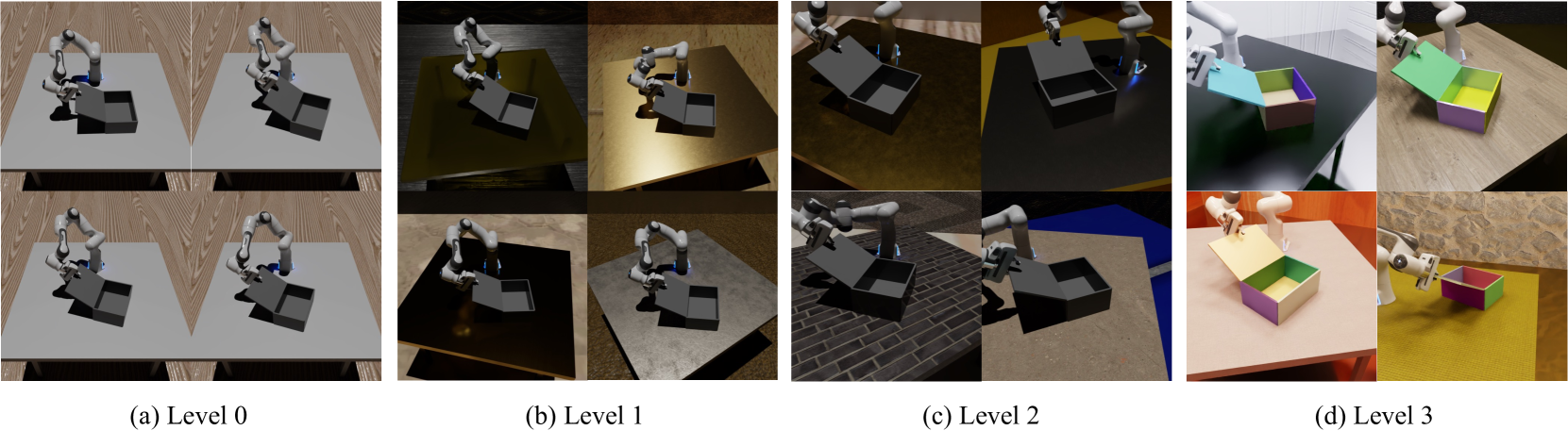
4단계 일반화 프로토콜(Fig. 9) — Level 0(task space) → Level 1(environment) → Level 2(camera) → Level 3(lighting·reflection)로 갈수록 randomization이 강해진다. 90% 학습 / 10% 일반화 평가.
직관 — 왜 “추상화 먼저”인가
이 논문의 핵심 통찰은 “정책을 잘 만드는 것”과 “데이터·벤치마크를 잘 만드는 것”이 서로 다른 문제이고, 후자가 전자의 전제조건이라는 점이다. 시뮬레이터 A의 태스크를 B에서 못 쓰면, 모든 연구자가 각자 같은 태스크를 재구현하며 바퀴를 다시 발명한다. MetaSim의 핵심은 “씬을 기술하는 언어(MetaConfig)”와 “그 언어를 실행하는 백엔드(Handler)”를 분리한 것 — 컴파일러가 소스코드와 타깃 아키텍처를 분리하듯. 이 분리 한 번으로 cross-simulator·hybrid·cross-embodiment가 모두 같은 추상화의 자연스러운 따름정리가 된다. 특히 hybrid simulation(정확한 물리 + 좋은 렌더러를 조합)은 단일 시뮬레이터가 못 주는 “정확하면서 사실적인” 데이터를 값싸게 만든다는 점에서 sim-to-real에 직접 기여한다.
실험 — 신뢰성 검증이 목적
저자들이 못 박는 점: 실험의 목적은 정책 성능 경쟁이 아니라 데이터·벤치마크의 신뢰성 검증과 시스템의 포괄성 입증이다.
IL 벤치마크(Tab. II). 각 소스 벤치마크에서 대표 태스크 하나씩(ManiSkill PickCube·StackCube, RLBench CloseBox, CALVIN MoveSliderLeft, LIBERO PickChocolatePudding, robosuite NutAssembly)을 골라 단일 태스크 설정·3 seed 평균으로 평가한다. 평균 성공률은 Diffusion Policy 48.6%, ACT 50.0%로 비슷하지만 태스크별 분산이 크다 — CALVIN MoveSliderLeft에서 ACT 85.0%·DP 76.5%로 높고, 접촉 풍부한 robosuite NutAssembly에서는 DP 7.1%·ACT 0.0%로 무너진다. 이 분산 자체가 “벤치마크가 다양한 난이도를 담는다”는 증거로 제시된다.
4단계 일반화(Tab. III). 핵심 메시지는 현 정책들이 시각 일반화에 매우 약하다는 것이다. PickCube에서 Diffusion Policy는 Level 0 52.7% → Level 1 11.1% → Level 2·3 0.0%, ACT는 31.7% → 30.0% → 6.7% → 3.3%로 카메라·조명 변동에서 거의 붕괴한다. MoveSliderLeft처럼 상대적으로 견고한 태스크(DP L0 76.5% → L3 60.0%)도 있지만, 전반적으로 시각 randomization이 강해질수록 급격히 떨어진다 — 이는 정책의 약점인 동시에 벤치마크가 의미 있는 난이도 구배를 제공한다는 방증이다.
궤적 증강(Fig. 10). 50개 source 시연에서 200·1000·3000개로 증강을 늘릴수록 4개 대표 태스크에서 Diffusion Policy 성공률이 일관 상승 — 증강 API의 효과와 확장성을 보인다.
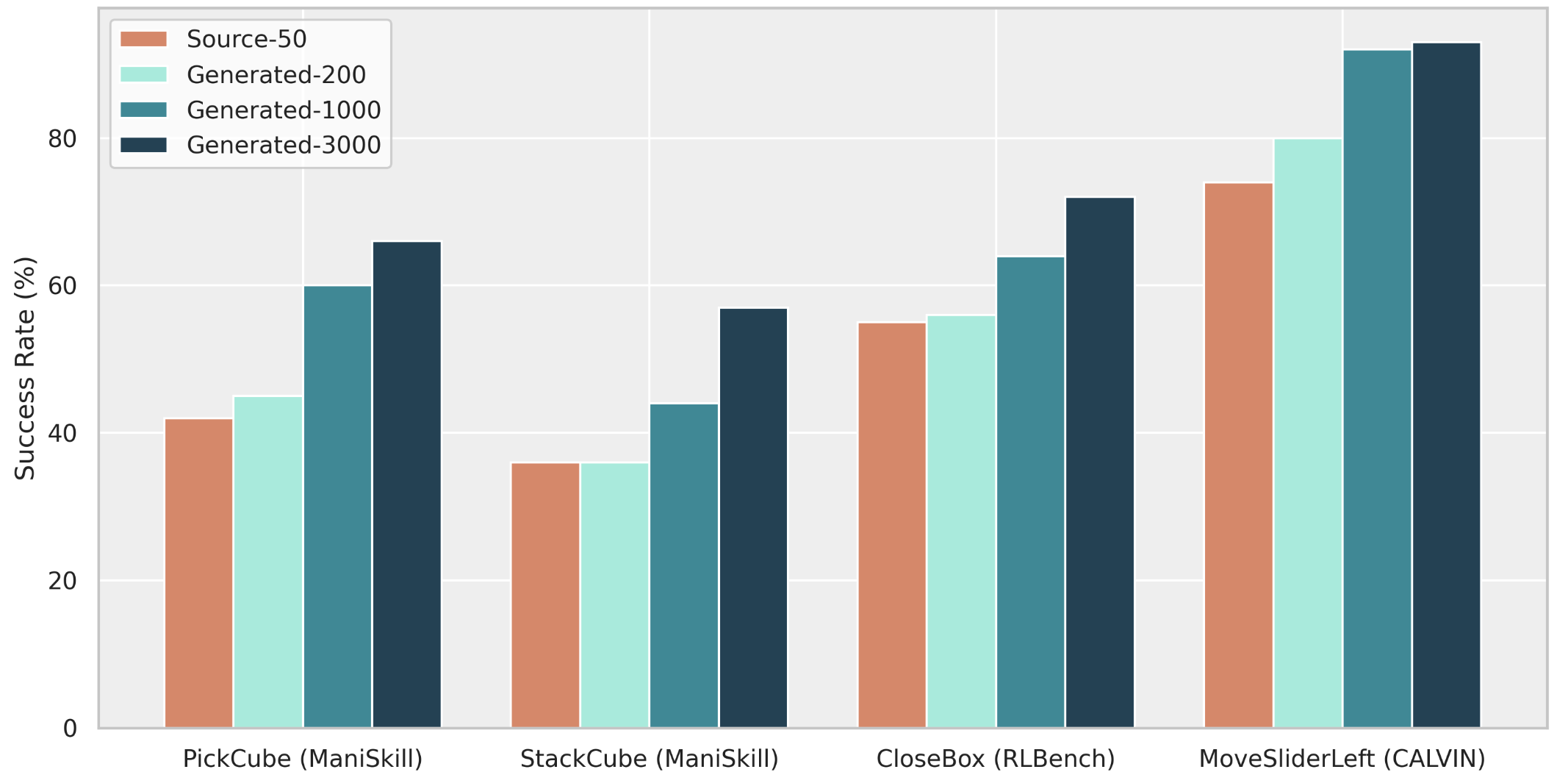
궤적 증강 효과(Fig. 10) — source 데이터셋 대비 증강 데이터셋으로 학습한 정책의 성공률. 생성 데이터가 늘수록 성능이 향상된다.
World model 학습(VI-E). DROID 50k episode만으로 학습한 action-conditioned world model은 action 조건은 따르나 그리퍼-물체 접촉의 물리를 못 잡아 접촉 시 물체가 “뒤틀린다(warped)”. RoboVerse 합성 50k를 더해 100k로 키우면 물체 기하 보존이 개선된다 — 합성 데이터가 실세계 데이터를 보강함을 보인다(다만 “영상만 보는 것”으로 DROID의 정교한 물리를 다 배우긴 부족하다고 솔직히 인정).
직접 sim-to-real / sim-to-sim-to-real(VI-F·G, Tab. V). RoboVerse 데이터로 미세조정한 OpenVLA를 추가 학습 없이 실세계로 옮겨 미지 환경의 미지 물체를 조작한다. GraspNet에서 적응한 시연으로 미세조정한 결과, 도전적 언어 유도 grasping에서 OpenVLA 7/10·8/10·5/10(50–80%), Octo 5/10·3/10·6/10. RL은 HumanoidBench whole-body 제어를 sim-to-sim-to-real로 전이한다.
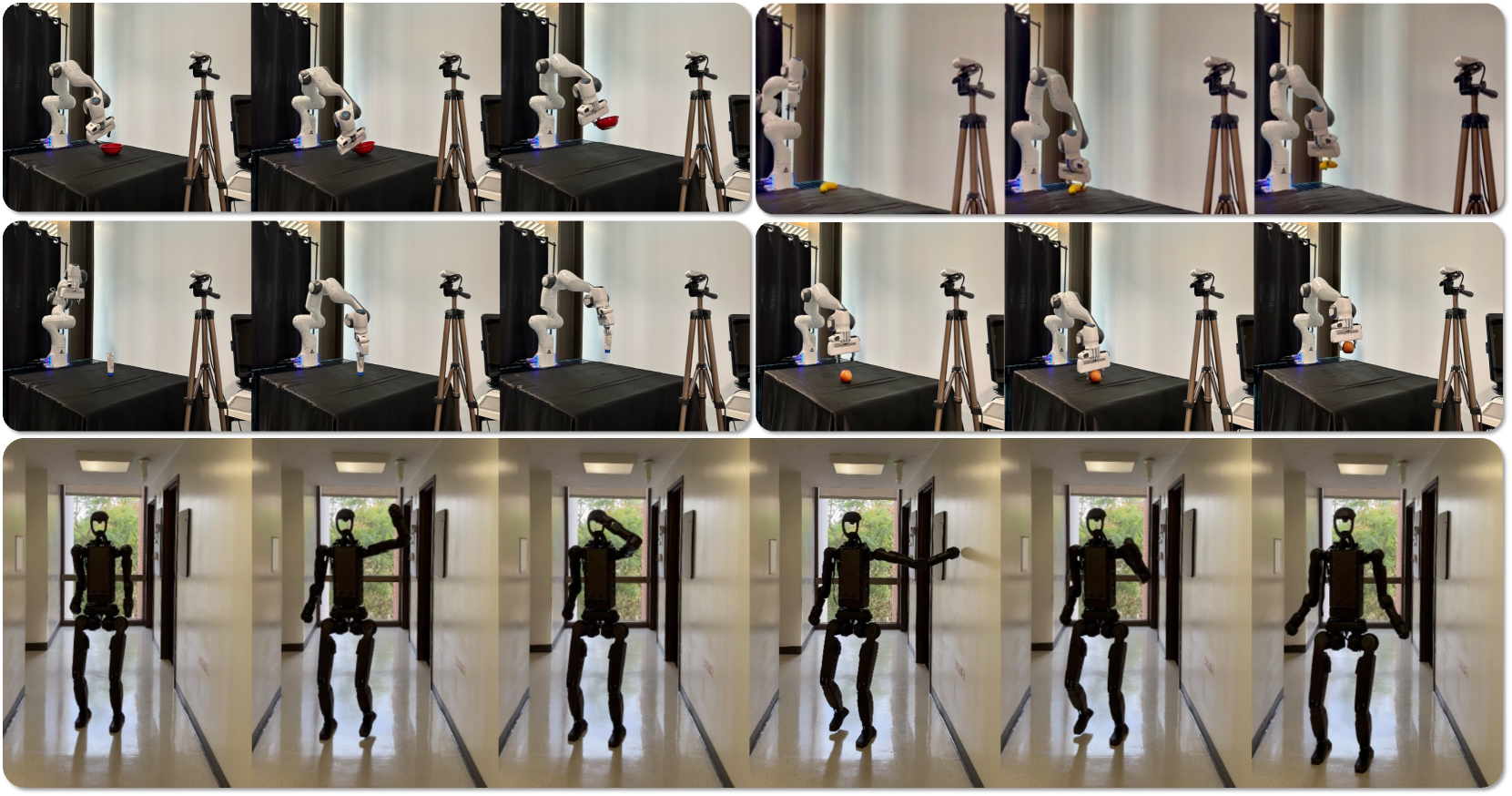
직접 sim-to-real(Fig. 12) — RoboVerse 프레임워크 내 학습이 미지 환경의 미지 물체 조작에서 매끄러운 직접 sim-to-real(IL)과 whole-body humanoid 제어의 sim-to-sim-to-real(RL) 전이를 가능케 함을 보인다.
🔬 재현 노트 (claude-curio demo)
논문의 핵심 주장(시뮬레이터-불가지론 추상화가 실제로 동작하는가)을 소비자 GPU 환경에서 직접 검증했다 — RTX 4070 Laptop 8GB.
- 통합 API·렌더까지 확인. MuJoCo 백엔드로
python metasim/example/control_test.py --sim mujoco --headless를 실행해 exit 0·100 스텝·Franka Panda 팔과 오브젝트 렌더 비디오를 얻었다. 명령 성공에 그치지 않고 결과까지 검증 — 디코드 결과 shape (100, 1024, 1024, 3) uint8, non-blank 100/100 프레임. - “1-인자 백엔드 교체”가 코드 레벨에서 성립.
ScenarioCfg(simulator=...)한 인자로 백엔드를 바꾸는 구조를 확인했다. 논문이 말하는 simulator-agnostic 추상화가 추상도 표현이 아니라 실제 인터페이스로 존재한다. - 재현성 디테일. 헤드리스 MuJoCo는
MUJOCO_GL=egl가 필수다. extras는 임의 조합이 안 된다 — 백엔드별로 numpy/torch/CUDA 핀이 달라 충돌하므로 백엔드 1개 = venv 1개가 실무 규칙이다. - 발견한 한계. PyBullet 백엔드는 이 커밋 기준 통합 state API가 불완전했다 —
_get_states가body_state를 채우지 않아 텐서 검증에서TypeError가 났다. 동일 경로를 MuJoCo는 통과하므로 환경 문제가 아니라 백엔드별 통합 성숙도 편차다.
재현은 claude-curio의 자체 데모(원본 MetaSim 기반)로 수행했다. 검증한 것은 통합 추상화의 동작 여부이지 데이터셋·벤치마크 전체 규모의 재현이 아니다.
비판적으로 보면
강점
- 파편화를 정면으로 푸는 추상화. “씬 기술(MetaConfig) ↔︎ 실행 백엔드(Handler)” 분리는 단순하지만 강력하다. 이 한 번의 결정으로 cross-simulator·hybrid·cross-embodiment가 모두 따름정리로 나온다 — 새 형식을 발명하지 않고 컴파일러식 분리를 로봇 시뮬레이션에 적용한 깔끔한 설계.
- 규모와 폭의 동시 달성. 14개 manipulation 벤치마크 + navigation(R2R·RxR·MatterPort3D) + locomotion(HumanoidBench·Humanoid-X)을 단일 포맷으로 모아 276 category·510.5k trajectory·50M+ transition을 만든 것은 단순 양이 아니라 이질적 소스를 통일했다는 점에서 가치가 크다.
- 벤치마크의 난이도 구배가 측정으로 드러난다. 4단계 프로토콜에서 정책 성공률이 Level이 오를수록 무너지는 것(PickCube 52.7→0.0%)은 벤치마크가 의미 있는 일반화 압력을 준다는 강한 증거다. “정책 경쟁이 아니라 신뢰성 검증”이라는 목적과 일관된다.
- sim-to-real까지 닫는 end-to-end. real-to-sim 자산 복원 → 데이터 생성 → 정책 학습 → 직접 sim-to-real까지 한 프레임워크에서 굴러가고, 추가 학습 없는 전이로 50–80% grasping을 보인 것은 hybrid simulation의 사실성 주장에 실증을 단다.
- 자기 한계에 정직하다. 부록에서 세 시뮬레이터(SAPIEN·Isaac Gym·PyBullet)가 운동량·각운동량·운동에너지 보존 법칙조차 지키지 못함을 직접 측정해 보이고, 이를 “복잡한 거동의 직접 sim-to-real 희망에 비관적 신호”라 적는다 — 자기 플랫폼의 토대(시뮬레이터)의 한계를 숨기지 않는 보기 드문 정직함.
약점·한계
- teaser 수치와 본문 수치의 불일치. Fig. 1 캡션은 “1,000+ task, 10M+ transition”을 내세우지만 본문 통계는 276 task category·510.5k trajectory·50M+ transition이다. 정의가 다른(task vs task category) 탓일 수 있으나, 대표 그림의 숫자가 본문과 어긋나는 것은 인용 시 혼동을 부른다 — 본 리뷰는 본문 수치를 권위로 삼았다.
- 평가 표본이 작다. IL은 학습 10 + 검증 10 시나리오·3 seed, sim-to-real grasping은 태스크당 10회로 표본이 작아 통계적 신뢰구간을 논하기 어렵다. OpenVLA는 자원 제약으로 20개 시나리오만, VLA는 단일 태스크 설정만 평가했다.
- 기준선이 최적이 아닐 수 있음(저자 인정). 모든 baseline을 RoboVerse 안에서 재구현했으나 일부는 suboptimal일 수 있다고 명시한다. 따라서 표의 절대 수치(예: ACT NutAssembly 0.0%)를 원 논문 성능과 직접 비교하면 안 된다 — 어디까지나 시스템 검증용.
- cross-embodiment의 범위가 좁다. retargeting이 평행 그리퍼 로봇에 한정된다. dexterous hand·다지 손 간 일반 retargeting은 다루지 않아, 손재주 조작 데이터의 cross-embodiment 재사용은 범위 밖이다.
- 비강체·foundation model은 미완. 비강체 물체의 통일 포맷이 아직 미지원이고(한계로 명시), 대규모 데이터로 foundation model을 사전학습하는 가장 흥미로운 활용은 자원 제약으로 본 논문 범위 밖이다 — “데이터셋을 만들었다”와 “그 데이터로 무엇이 가능한가”는 아직 부분적으로만 연결된다.
- 시뮬레이터 물리 자체의 천장. 보존 법칙 위반 실험이 보여주듯, 통합 추상화가 아무리 깔끔해도 하부 시뮬레이터들의 물리 부정확성은 그대로 상속된다. 통합이 정확성을 만들어주지는 않는다.
- 인프라·유지보수 부담. 6개 시뮬레이터 백엔드를 동시에 정렬·유지하는 것은 지속적 비용이며, 각 시뮬레이터 업데이트마다 Handler 정합을 맞춰야 한다. 논문은 커뮤니티 기여로 유지하자고 제안하나, 장기 정합성은 열린 문제다.
- 백엔드별 통합 성숙도 편차. 6개 백엔드 동등 지원을 표방하지만 실제 성숙도는 백엔드마다 다르다 — 위 재현 노트에서 MuJoCo는 통합 state API가 정상 동작한 반면 PyBullet은 같은 경로에서
body_state를 채우지 못해 실패했다. “통합 인터페이스”가 모든 백엔드에서 동일 수준으로 완성됐다고 가정하면 안 된다.
관련 연구와의 자리매김
RoboVerse는 세 흐름의 합류점에 있다. 첫째, 로봇 시뮬레이터·데이터 생성기: GPU 병렬 시뮬레이션으로 대규모 데이터·렌더링을 제공하는 ManiSkill3 리뷰는 RoboVerse가 마이그레이션하는 소스 중 하나이며, “단일 시뮬레이터의 깊이 vs 다중 시뮬레이터의 통합”이라는 대비를 이룬다. 강한 domain randomization을 갖춘 확장형 데이터 생성기·벤치마크 RoboTwin2 리뷰와는 목표(확장 가능 데이터 + 견고한 벤치마크)가 매우 가깝되, RoboVerse는 단일 시뮬레이터가 아니라 시뮬레이터-횡단 통합을 택한 점이 다르다. 둘째, 벤치마크: 1,000개 일상 활동을 담은 BEHAVIOR-1K 리뷰, whole-body locomotion·manipulation의 HumanoidBench 리뷰는 RoboVerse가 직접 마이그레이션해 RL 벤치마크로 흡수한 대상으로, “개별 벤치마크 vs 벤치마크들의 메타-통합”이라는 층위 차이를 보여준다. RoboVerse의 sim-to-sim-to-real humanoid 전이는 Whole-Body Humanoid Locomotion 리뷰와 맞닿는다. 셋째, 데이터 증강·world model: 궤적 증강은 DexMimicGen 리뷰가 확장한 MimicGen 프레임워크(object-centric subtask 분해)에 기반하며, world model 실험은 대규모 멀티태스크 world model을 다루는 Newt(TD-MPC2 World Model) 리뷰와 “합성 데이터가 world model 학습을 보강하는가”라는 질문에서 만난다.
요약
RoboVerse의 기여는 “로봇 학습의 스케일링 병목은 모델이 아니라 시뮬레이션 인프라의 파편화이며, 시뮬레이터-불가지론 추상화(MetaSim) 하나로 흩어진 시뮬레이터·벤치마크·데이터를 단일 포맷으로 통합할 수 있다”는 시스템적 명제를 광범위한 실증으로 뒷받침한 데 있다. MetaConfig(씬 기술) ↔︎ Handler(백엔드 실행) ↔︎ Gym 래퍼의 3계층이 cross-simulator·hybrid·cross-embodiment를 따름정리로 만들고, 그 위에서 14개 벤치마크 마이그레이션 + teleoperation·AI 생성·real-to-sim + 증강·randomization으로 276 category·510.5k trajectory·50M+ transition을 쌓는다. IL 벤치마크(DP 48.6%·ACT 50.0%)와 4단계 일반화(PickCube 52.7→0.0%)는 데이터·벤치마크의 신뢰성과 난이도 구배를 검증하고, RoboVerse 데이터로 미세조정한 OpenVLA의 직접 sim-to-real grasping 50–80%는 hybrid simulation의 사실성을 실증한다. 한계도 분명하다 — teaser 수치 불일치, 작은 평가 표본, 평행 그리퍼에 한정된 cross-embodiment, 미완의 비강체·foundation model 활용, 그리고 보존 법칙조차 어기는 하부 시뮬레이터의 물리 천장. 그럼에도 “정책 경쟁 이전에 공용 기반을 먼저 깐다”는 이 프레임워크의 관점은, 파편화로 멈춰 있던 시뮬레이션 보조 로봇 학습에 설득력 있는 통합 청사진을 제시한다. (코드·데이터셋은 프로젝트 페이지에 공개 — 재현 평가는 환경 구축 후 가능.)