📃Stretchable Glove 리뷰
Myungsun Park, Taejun Park, Soah Park, Sohee John Yoon, Sumin Helen Koo, Yong-Lae Park (Seoul National University · UC San Diego · Yonsei University)
Nature Communications, 2024
- 💡 스트레치 하나로 착용자의 손가락 뼈 길이(kinematic 구조)와 관절 각도(motion)를 동시에 추정하는 소프트 센싱 글러브 — 사전 측정·개인화 캘리브레이션 없이 착용 즉시 손을 재구성한다.
- ⚙️ 실리콘 기판에 심은 9가닥 액체금속(eGaIn) 스트레인 센서가 손에 맞춰 늘어나며(초기 stretch = 뼈 길이 정보) 관절 회전에 따라 저항이 변하고(관절 각도 정보), Bayes 갱신으로 뼈 길이를, Kalman 필터 선형 상태공간으로 관절각을 추정한 뒤 순기구학(FK)으로 손을 복원한다.
- 🎯 뼈 길이 평균오차 2.1 mm, 관절각 평균오차 4.16°, 지문 3D 위치 오차 4.02 mm로, 별도 kinematic 제약 없이 그림자놀이 같은 비정형 포즈까지 재구성하고 Allegro 로봇손 원격조작을 시연했다.
🔍 Ping Review
🔍 Ping — A light tap on the surface. Get the gist in seconds.
사람 손은 자유도(DoF)가 많고 개인차가 크다. 손 포즈를 정확히 복원하려면 두 가지를 모두 알아야 한다 — 손의 골격 구조(뼈 길이)와 관절이 지금 얼마나 굽었는가(관절 각도). 기존 웨어러블은 관절각만 재고 뼈 길이는 (수작업 측정하거나) 평균값을 모두에게 적용해, 순기구학(FK)에서 큰 오차가 나거나 역기구학(IK)에서 해가 여러 개거나 없는 문제를 겪었다. 비전 기반은 정확하지만 가림·조명·카메라 배치에 취약해 자유로운 착용이 어렵다. 이 논문은 하나의 스트레치 센싱 메커니즘으로 뼈 길이와 관절각을 동시에 얻어, 착용 즉시 개인화 캘리브레이션 없이 손을 재구성하는 글러브를 제안한다.
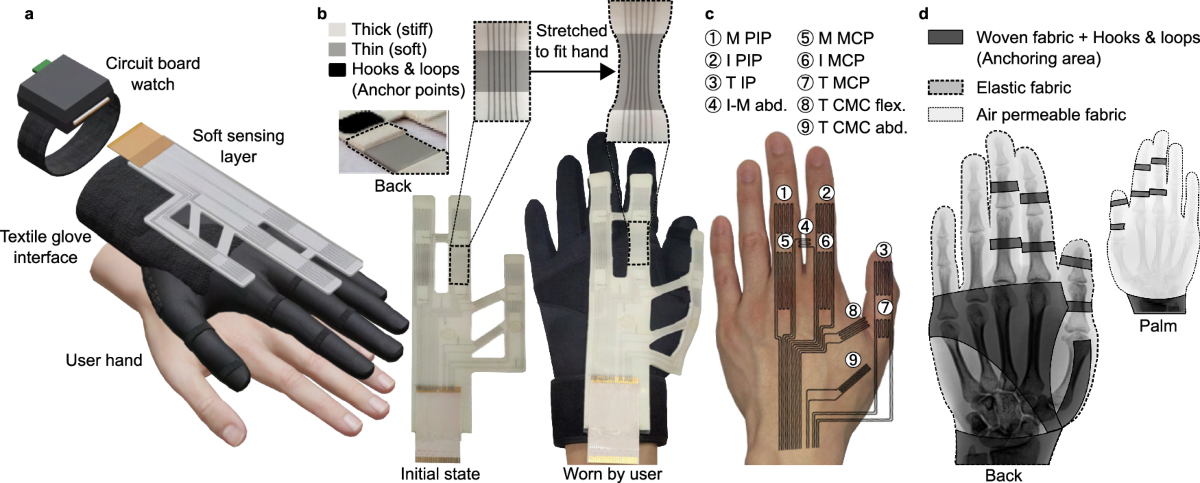
글러브 하드웨어 개요(Fig. 1) — (a) 액체금속 소프트 센싱 층 + 손 해부학에 맞춘 직물 글러브 인터페이스 + 손목 시계형 회로 보드. (b) 센싱 층은 손보다 작게 만들어 착용 시 늘어나며(pre-stretch) 손 크기를 초기 추정. (c) 엄지·검지·중지 7개 관절 10 DoF를 재도록 배치한 9가닥 eGaIn 트레이스. (d) 뼈 중앙(관절 위)에 벨크로로 고정해 각 센서가 단축(uniaxial) 인장만 받게 한다.
핵심 착상은 소프트 스트레인 센서의 큰 신축성을 캘리브레이션 부담을 없애는 데 쓴 것이다. 센서 층은 손보다 작게 제작돼, 착용하면 손 크기에 맞춰 늘어난다. 이 초기 stretch 양이 곧 뼈 길이의 단서가 되고, 이후 손가락을 움직일 때의 저항 변화가 관절각의 단서가 된다. 한 번의 착용으로 골격과 동작을 함께 잡는 것이다. 벨크로 앵커를 뼈 중앙에 두어 각 센서가 회전 없이 단축 인장만 받게 하면, 센서 신호 ↔︎ (뼈 길이, 관절각) 조합이 일대일(injective)이 되어 서로 다른 손 구성이 서로 다른 신호를 낳는다.
핵심 방법론:
관절각 추정은 선형 가우시안 상태공간 모델로 두고 Kalman 필터로 푼다. 상태 \mathbf{x}_k \in \mathbb{R}^{10\times 6}는 최근 0.1초(60 Hz의 6 샘플)의 10개 관절각, 관측 \mathbf{y}_k \in \mathbb{R}^{9}는 9개 센서 신호다.
\mathbf{x}_{k+1} = \mathbf{A}\mathbf{x}_k + \mathbf{w}_k,\qquad \mathbf{y}_k = \mathbf{H}\mathbf{x}_k + \mathbf{v}_k,\qquad \mathbf{w}_k \sim \mathcal{N}(0,\mathbf{Q}),\ \mathbf{v}_k \sim \mathcal{N}(0,\mathbf{R})
시스템 행렬 \mathbf{A},\mathbf{Q},\mathbf{H},\mathbf{R}은 캘리브레이션 데이터에 최소자승으로 적합한다. 뼈 길이는 초기 stretch로 1차 추정한 뒤, 손을 움직이며 얻는 신호 분포로 Bayes 갱신해 정련한다: p(\mathbf{x}\mid\mathbf{y}) \propto p(\mathbf{x})\,p(\mathbf{y}\mid\mathbf{x}). 마지막으로 추정된 뼈 길이·관절각을 FK 손 모델에 넣어 손을 복원한다. IK와 달리 kinematic 제약이 필요 없어 학습 데이터 범위 밖의 비정형 포즈도 그대로 그린다.
주요 결과:
- 뼈 길이 초기 추정(13명): 평균 절대오차 2.06 mm(참뼈 길이 대비 ~6.9%). 손을 400초 움직이며 Bayes로 정련하면 초기 대비 8.3~16.3% 추가 감소.
- 관절각 추정(60 Hz, Kalman): self-calibration 그룹 평균 오차 소형 손 3.91°, 대형 손 4.16°. non-calibration 그룹은 소형 4.69°, 대형 7.14°로 더 크다.
- 지문 3D 위치: 소형 손 3.24 mm, 대형 손 4.02 mm(각 작업공간 한 변의 ~16%) — 저자 주장으로는 상용 시스템 최소 보고오차의 절반 이하.
- 응용: 가상 숫자패드 타이핑(80×60 mm), 다섯 동물 그림자놀이(비정형 포즈), Allegro 로봇손 원격조작 3태스크(공 조작·마우스 휠·볼륨 노브).
결론: “센서 하나로 골격과 동작을 함께 잡는다”는 설계가, 착용 즉시 개인화 없이 다양한 손·비정형 포즈를 정확히 복원하는 웨어러블을 가능하게 했다. FK 기반 복원은 제약이 없어 학습 분포 밖 포즈까지 재현하는 강건성을 준다.
🔔 Ring Review
🔔 Ring — An idea that echoes. Grasp the core and its value.
한 줄로 시작하면
이 논문의 한 문장은 “손 포즈 복원의 두 미지수 — 뼈 길이와 관절각 — 을 늘어나는 소프트 센서 하나로 동시에 잡자”다. 뼈 길이를 개인화해 FK가 정확해지고, FK를 쓰므로 kinematic 제약 없이 임의 포즈까지 복원된다. 캘리브레이션 없이 착용 즉시 작동한다는 실용성이 핵심 매력이다.
왜 어려운가: 손 포즈의 두 미지수
사람 손을 복원하려면 kinematic 구조(각 뼈의 길이·해부학적 오프셋)와 joint motion(관절 각도)을 둘 다 알아야 한다. 관절각만 알아도 뼈 길이를 모르면 지문 위치가 크게 틀어지고, 반대도 마찬가지다. 문제는 이 둘을 얻는 방식이 서로 달라 시스템이 복잡·거대해진다는 점이다.
- 관절각: 스트레인/굽힘 센서, 엔코더, IMU로 직접 측정. 웨어러블에 적합하지만 뼈 길이는 못 준다.
- 뼈 길이(구조): 비전 기반 식별은 정확하나 통제된 셋업·가림에 취약하고, 수작업 측정은 검사자 숙련도에 의존한다. 그래서 많은 연구가 평균 뼈 길이를 모두에게 적용했는데, 이는 FK에서 큰 오차를, IK에서는 다중해/무해를 낳았다. 이를 완화하려 복잡한 kinematic 제약을 걸면 계산이 무겁고 잠재적 해를 배제할 수 있다.
- 여러 센싱을 통합하면 정확하지만 부피가 커지고 착용성이 떨어진다. 반대로 하드웨어를 줄인 접근은 소수의 포즈 분류에 그쳤다.
즉 정확도·강건성·착용성을 동시에 만족하는 시스템이 비어 있었다. 이 글러브는 “센서 하나로 두 미지수를”라는 답으로 그 자리를 메운다.
방법 상세
하드웨어: 액체금속 소프트 센서 + 직물 인터페이스
센싱 층은 실리콘 기판(Ecoflex 00-30, 100% 모듈러스 69 kPa, 파단 신율 900%)에 상온 액체금속 eGaIn 9가닥을 심은 것이다. 손 형상에 맞춰 늘어나며 저항 변화로 변형을 읽는다. 감도를 높이려 단일 재료의 두께를 바꿔 강성 분포(multi-stiffness)를 만들었고, 게이지 팩터 3.4를 얻었다. 트레이스는 엄지·검지·중지의 7개 관절 10 DoF를 재도록 배치된다(검지·중지의 PIP·MCP flexion, MCP abduction; 엄지의 IP·MCP·CMC flexion, CMC abduction).
핵심 설계는 벨크로 앵커를 뼈 중앙에 두는 것이다. 이렇게 하면 (1) 센서가 회전·변위 없이 단축 인장만 받아 신호가 관절 회전으로만 결정되고, (2) 센서 간 결합이 줄어 신호↔︎(관절각, 뼈 길이) 관계가 injective해지며(서로 다른 손 구성 = 서로 다른 신호), (3) 뼈 중앙이라는 명확한 지점 덕에 손 크기가 달라도 반복 부착이 일관된다. 직물 글러브는 관절 부위는 크게 변형되고 뼈·손등 부위는 단단히 고정되도록 신축·비신축 원단을 패턴해, 모든 변형이 손가락 관절에서만 나오게 한다. 신호는 손목의 시계형 PCB(정전류 8 mA, ADS1115 ADC, STM32 MCU)에서 60 Hz로 읽어 Bluetooth로 무선 전송한다.
데이터: 포괄적 모션 데이터와 후처리
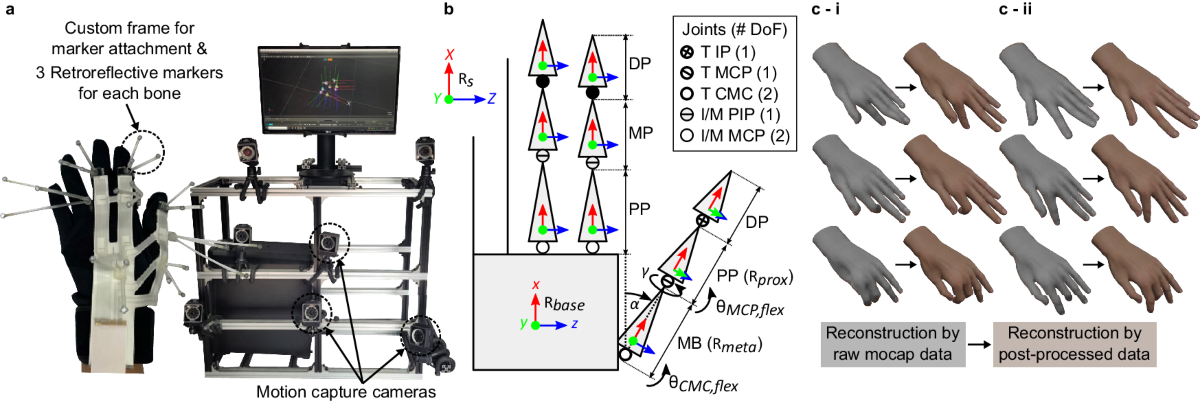
데이터 수집·모델링·후처리(Fig. 2) — (a) OptiTrack 모션캡처와 뼈마다 세 마커로 강체를 정의하는 커스텀 돌출 프레임(마커 간 >30 mm로 자기가림 방지). (b) zero-pose FK 손 모델과 해부학 파라미터 \alpha_\text{abd},\gamma_\text{roll}. (c) 21-DoF 원시 회전(회색)을 후처리해 10-DoF 관절각(컬러)으로 변환 — 잉여 DoF가 낳는 부자연스러운 동작을 교정한다.
관절각은 개인 해부학에 무관한 보편 표현이라, 임의 피험자의 데이터를 하나의 FK 모델에 쓸 수 있다. 이를 위해 마커를 관절이 아니라 뼈마다 세 개씩 붙여 강체 회전을 직접 재고(변형 피부 위 관절 위치 추정 오차를 회피), 커스텀 프레임으로 마커를 밖으로 빼 자기가림을 막았다. 후처리는 원시 회전에서 참 오프셋(abduction offset \alpha^{*}_\text{abd}, roll offset \gamma^{*}_\text{roll})을 찾아 flexion 축을 정렬함으로써, 1-DoF 관절은 flexion 하나로, 2-DoF 관절은 pitch·yaw를 flexion·abduction으로 해석하게 만든다(참 오프셋에서 roll은 무시할 수준). 이렇게 21-DoF 원시 데이터를 10-DoF 관절각으로 정제해 잉여 DoF의 부자연스러운 동작을 교정한다(Fig. 2c). 약지·소지는 캡처하지 않고 시각화용으로 중지 관절각의 2/3·2/5로 가정한다.
뼈 길이: 초기 추정 + Bayes 정련
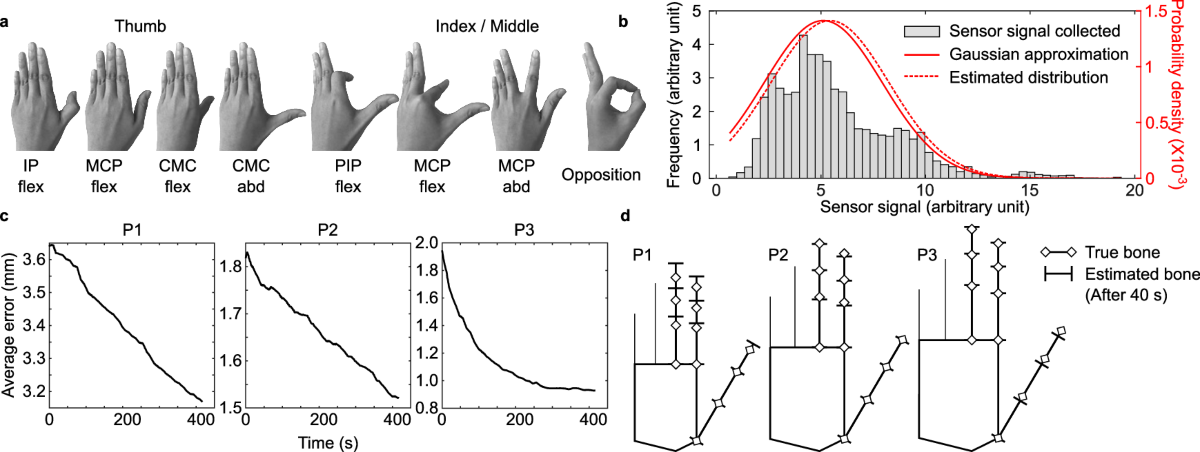
뼈 길이 실시간 정련(Fig. 3) — (a) 정련을 위해 8개 포즈로 제한한 손동작. (b) 특정 센서 신호 히스토그램의 가우시안 근사와, 피험자 뼈 길이로부터 추정한 분포. (c) 손을 움직일수록 10개 뼈 평균 추정오차가 감소(세 피험자). (d) 정련 결과가 실제 골격에 더 가까워짐.
앵커 설계로 손 해부학마다 고유한 신호 집합이 나온다는 가정 아래, 착용 순간의 초기 신호로 뼈 길이를 1차 추정한다(13명 특성화). 이후 손을 움직이며 얻는 신호 분포로 Bayes 갱신한다:
p(\mathbf{x}\mid\mathbf{y}) \propto p(\mathbf{x})\,p(\mathbf{y}\mid\mathbf{x})
신호 분포를 가우시안으로 근사하면 사후분포의 해석적 갱신식이 나오고(뼈 길이 추정 \hat{\mathbf{x}}_k를 이전 추정과 신호 잔차로 갱신하는 형태), 손을 움직일수록 추정이 정련된다. 다만 이 가우시안 가정은 Fig. 3a의 제한된 8개 포즈에서만 유효하며, 자유로운 동작으로의 확장(비가우시안 likelihood·비해석적 사후)은 저자가 future work로 남겼다.
관절각: 선형 상태공간 + Kalman 필터
관절각은 앞의 상태공간 모델 \mathbf{x}_{k+1}=\mathbf{A}\mathbf{x}_k+\mathbf{w}_k,\ \mathbf{y}_k=\mathbf{H}\mathbf{x}_k+\mathbf{v}_k로 두고, 시스템 행렬 (\mathbf{A},\mathbf{Q},\mathbf{H},\mathbf{R})을 캘리브레이션 데이터에 최소자승으로 적합한 뒤 Kalman 필터로 추정한다. 여기서 실무적 요점은 착용자마다 pre-stretch 정도가 달라 선형 관계가 흔들린다는 점이다. 저자는 피험자를 소형·대형 손 두 그룹으로 나눠 각각 시스템 행렬을 캘리브레이션해 이를 보정했다. 즉 “무캘리브레이션 착용 즉시 작동”이라는 서사는, 실제로는 손 크기 그룹별로 미리 적합된 모델을 전제로 한다(뒤 약점에서 다룸).
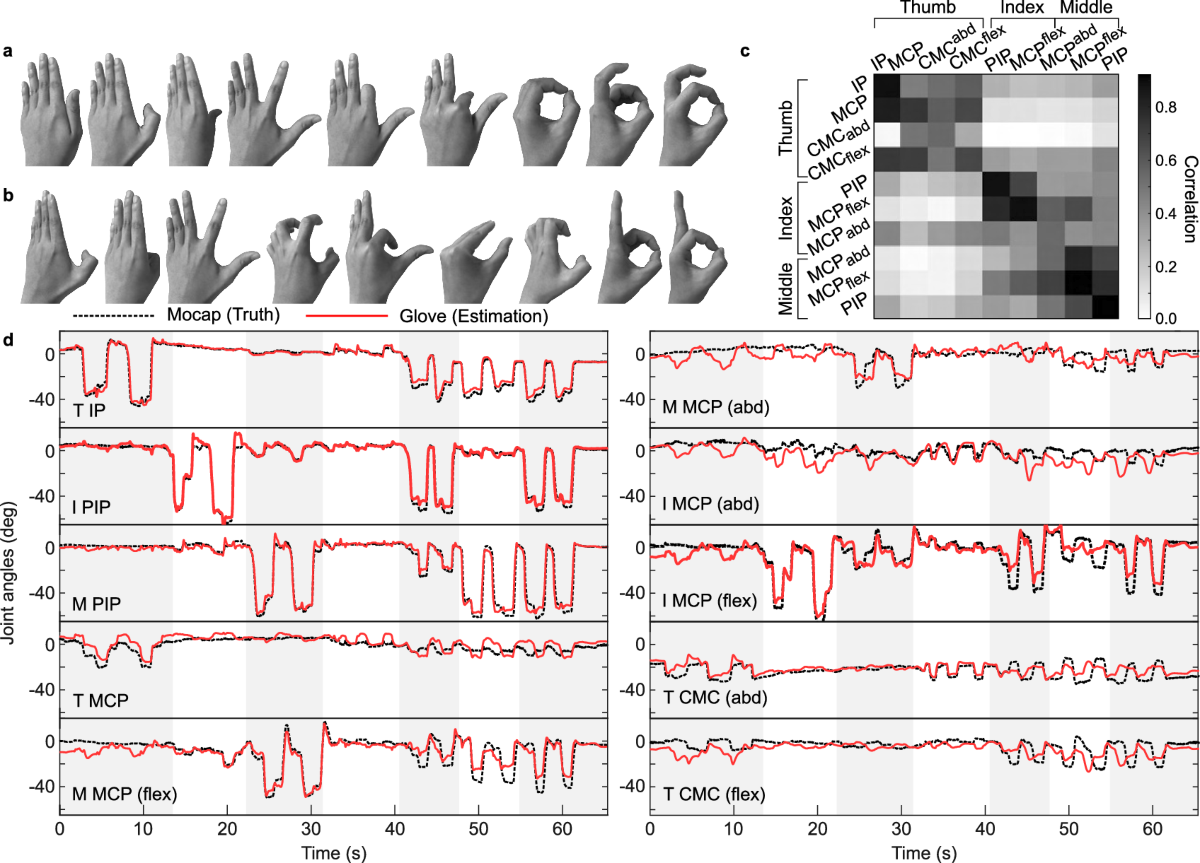
관절각 실시간 추정(Fig. 4) — (a) 캘리브레이션, (b) 평가용 손동작. (c) 관절각(세로)과 센서 신호(가로)의 상관 맵: 대각(각 손가락↔︎대응 센서)이 지배적이고, 손동작 synergy·센서 간 기계적 결합으로 비대각도 유의. (d) 대형 손(self-calibration)의 추정 vs 실측 관절각 시계열.
직관: FK를 고르는 이유
이 시스템은 관절각을 IK로 역산하지 않고 뼈 길이를 개인화한 FK로 순방향 복원한다. 두 이점이 있다. 첫째, IK가 요구하는 복잡한 kinematic 제약이 필요 없어 계산이 가볍다. 둘째, 제약이 없으므로 복원이 학습 데이터나 제약의 범위에 갇히지 않는다 — 그림자놀이 같은 일상에 없는 포즈도 뼈 길이·관절각만 정확하면 그대로 그린다. 다만 이 장점의 대가는 명확하다: FK는 입력(관절각·뼈 길이) 오차를 지문 위치로 그대로 전파한다. 실제로 지문 궤적이 실측보다 운동 범위를 과소추정하는 것은 관절각 과소추정이 FK로 누적된 결과다.
실험
세 가지 정량 평가
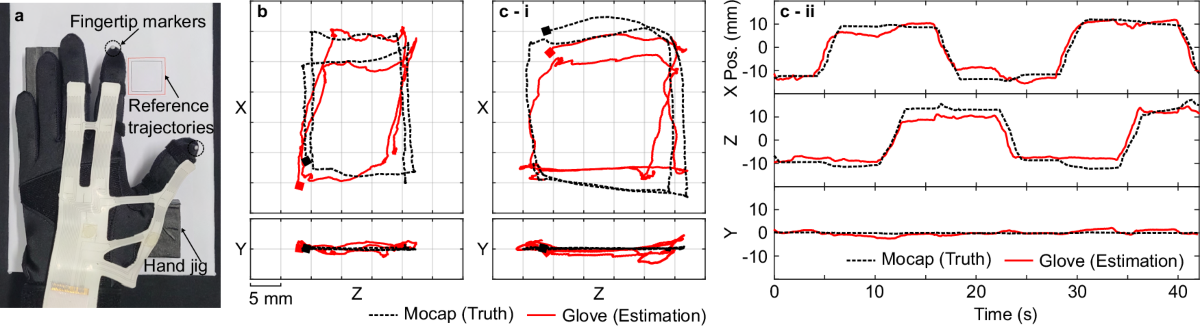
지문 위치 추정(Fig. 5) — (a) 뼈 길이·관절각 추정으로 지문 위치를 예측하는 테스트. (b) 소형 손, (c) 대형 손의 실측 vs 추정 3D 궤적(및 시계열). 궤적은 대체로 일치하나 운동 범위를 과소추정하고 소형 손은 공간 왜곡이 보인다.
정량 평가는 세 축이다.
| 평가 | 지표 | 결과 |
|---|---|---|
| 뼈 길이 초기추정(13명) | 평균 절대오차 | 2.06 mm (~6.9%) |
| 관절각(self-cal) | 평균 절대오차 | 소형 3.91° / 대형 4.16° |
| 관절각(non-cal) | 평균 절대오차 | 소형 4.69° / 대형 7.14° |
| 지문 3D 위치 | 평균 3D 오차 | 소형 3.24 mm / 대형 4.02 mm (~16% 작업공간) |
읽을 점:
- 관절별 편차가 크다. 평균은 4° 근처지만 개별 관절은 다르다. self-cal 소형 손의 엄지 MCP flexion은 11.83°, non-cal 소형 손의 엄지 CMC abduction은 15.08°, non-cal 대형 손의 검지 MCP flexion은 13.11°에 달한다. 엄지(대립·복합 회전)와 새 사용자에서 오차가 집중된다.
- 캘리브레이션 여부가 크게 갈린다. non-calibration 대형 손 평균 7.14°는 self-cal 대비 뚜렷이 나쁘다. 논문도 “더 많은 손 크기 데이터로 캘리브레이션을 정련하면 보편 적용 가능”이라 인정한다 — 즉 현재는 새 사용자 일반화가 아직 제한적이다.
- 지문 오차는 손 크기에 일관. 소형 3.24 mm·대형 4.02 mm 모두 작업공간 한 변의 ~16%로, 크기와 무관하게 상대 성능이 유지됨을 시사한다.
정성 평가와 응용
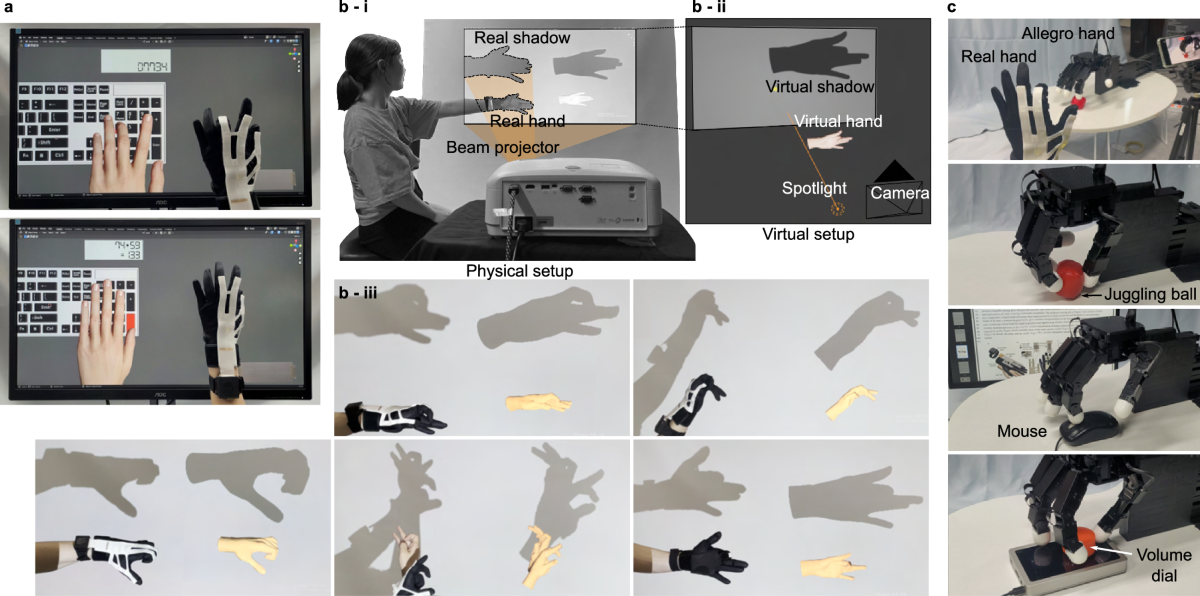
응용(Fig. 7) — (a) 가상 숫자패드 타이핑(80×60 mm 작업공간, 정밀 지문 위치 요구). (b) 실제·가상(Blender) 트윈 환경에서의 그림자놀이 — 비정형·복잡 포즈로 FK 복원의 강건성 강조. (c) Allegro 로봇손 원격조작: 공 재배치·마우스 휠 스크롤·볼륨 노브 회전.
정성 평가로 Blender 가상 손을 30 Hz로 실시간 복원하며(제약 없는 FK), 여러 손가락 끝의 접촉·근접을 촉각 센서 없이 재현했다 — 뼈 길이·관절각 추정이 정확하다는 방증이다. 수정된 Kapandji 테스트(엄지가 검지·중지의 뼈마디에 접촉)로 엄지 대립도 재구성했다. 응용은 (1) 정밀 지문 위치를 요구하는 숫자패드 타이핑, (2) 학습 분포 밖 비정형 포즈인 그림자놀이(다섯 동물), (3) 공·마우스 휠·볼륨 노브를 다루는 Allegro 로봇손 원격조작이다. 특히 그림자놀이는 제약 없는 FK가 “일상에 없는 포즈”까지 복원하는 강건성을 보여주는 좋은 예다.
비판적으로 보면
강점
- 하나의 센싱으로 두 미지수를: 뼈 길이(구조)와 관절각(동작)을 같은 스트레인 신호에서 동시에 뽑는 설계가 핵심 기여다. 이 덕에 개인화 측정·별도 캘리브레이션 절차 없이 착용해 바로 쓰는 실용성을 얻었고, “평균 뼈 길이를 모두에게” 쓰던 기존 FK/IK의 고질적 오차를 정면으로 공략한다.
- 제약 없는 FK의 강건성: IK의 복잡한 kinematic 제약을 버려 계산이 가볍고, 복원이 학습 분포·제약 범위에 갇히지 않는다. 그림자놀이 같은 비정형 포즈 재현이 이 설계 선택의 직접 증거다.
- 보편 표현(관절각) 기반 데이터: 마커를 뼈 강체로 붙이고 후처리로 해부학 무관한 관절각을 추출해, 서로 다른 손의 데이터를 하나의 FK 모델로 통합한다. 잉여 DoF 교정(Fig. 2c)도 깔끔하다.
- 정량 수치의 설득력: 뼈 길이 2.1 mm·관절각 4.16°·지문 4.02 mm는 웨어러블 치고 낮고, 촉각 센서 없이 다지문 접촉을 FK로 재현한 점은 추정 정확도를 방증한다. 소프트·무선·시계형 폼팩터로 착용성도 챙겼다.
약점·한계
- 세 손가락만: 엄지·검지·중지만 측정하고 약지·소지는 중지의 2/3·2/5로 가정한다(시각화용). 저자도 인정하듯, 손가락별 독립 동작이 필요한 정밀 파지에는 현재 상태로 부족하다. 확장은 처리비용 증가와 더 큰 데이터셋을 요구한다.
- 새 사용자 일반화가 아직 약함: non-calibration 대형 손 평균 7.14°, 일부 관절은 13~15°까지 커진다. “착용 즉시 무캘리브레이션 작동”이라는 서사는 실제로 소형/대형 손 그룹별로 미리 적합된 시스템 행렬을 전제로 하며, 임의 사용자에 대한 무캘리브레이션 성능은 검증 범위 밖이다.
- 표본이 작다: 뼈 길이 13명은 그렇다 쳐도, 관절각·지문 평가는 각각 2+2명, 2명뿐이다. 관절별 오차 편차가 큰 상황에서 이 표본으로는 통계적 신뢰구간이 넓을 수밖에 없다.
- 모델의 단순화 가정: 관절각은 선형 상태공간(비선형화하면 개선 여지, 저자 인정), 뼈 길이 정련의 가우시안 likelihood는 8개 제한 포즈에서만 유효(자유 동작 확장은 future work). 즉 두 추정 모두 현재는 제약된 조건에 기대고 있다.
- 비교의 엄밀성: 베이스라인 우위 주장이 “ref. 16에서 평가된 상용 시스템보다 낫다”, “상용 최소 보고오차의 절반 이하” 식의 간접 비교(Supplementary Table 5)에 기댄다. 동일 조건 head-to-head 비교는 아니어서 이득 크기를 단정하기 어렵다.
- 재현성·완성도: 공개 코드는 없고 Source Data만 제공된다. 상용 대비 처리 속도·UI·세탁성이 뒤처지고 햅틱 피드백이 없다(저자 인정). 액체금속 소프트 센서·커스텀 모션캡처 셋업 의존이라 외부 재현이 쉽지 않다(이 리뷰도 논문 본문 근거로만 작성).
관련 연구와의 자리 매김
이 글러브는 웨어러블 손 포즈 센싱과 그 하류인 human→robot hand 원격조작 사이에 놓인다. 글러브가 만드는 정확한 인간 손 포즈는, 그 자체로 데이터가 되기도 하지만 로봇손으로 옮겨야 쓸모가 커진다.
- GeoRT 리뷰는 인간 손 포즈를 로봇손으로 옮기는 기하 기반 초고속 retargeting을 다룬다 — 이 글러브의 출력(관절각·지문)을 받아 Allegro 같은 로봇손을 구동하는 다음 단계에 대응한다.
- Retargeting Survey 리뷰는 human-to-robot hand motion mapping 방법을 분류한다. 이 글러브가 던지는 “인간 손을 얼마나 정확히 잡느냐”는 retargeting 품질의 상류 병목이라, 두 흐름은 자연스럽게 이어진다.
- DexFlow 리뷰는 dexterous hand pose retargeting·상호작용을 통합적으로 다뤄, 글러브가 준 포즈를 시뮬레이션·최적화로 정합하는 관점을 보완한다.
즉 이 논문은 원격조작 파이프라인의 입력단(정확한 인간 손 캡처)을 웨어러블로 강화하는 기여이며, retargeting 계열 연구가 그 하류를 맡는다.
요약
Stretchable Glove는 “손 포즈의 두 미지수 — 뼈 길이와 관절각 — 을 늘어나는 소프트 센서 하나로 동시에 잡자”는 한 줄 아이디어를, eGaIn 액체금속 스트레인 센서 + 뼈 중앙 앵커(injective 신호) + Bayes 뼈 길이 정련 + Kalman 관절각 추정 + 제약 없는 FK 복원이라는 조합으로 구현했다. 뼈 길이 2.1 mm·관절각 4.16°·지문 4.02 mm의 정확도로, 캘리브레이션 부담을 줄이면서 그림자놀이 같은 비정형 포즈와 Allegro 로봇손 원격조작까지 시연했다. 한계는 세 손가락 한정, 새 사용자·자유 동작에서의 일반화 여지, 작은 표본, 그리고 공개 코드 부재다. 그럼에도 “센서 하나로 골격과 동작을 함께 잡아 착용 즉시 손을 복원한다”는 설득력 있는 웨어러블 접근을 제시한다.